Ј
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИНТОВОЙ МЕХАНИЗМ | 1971 |
|
SU300685A1 |
| Устройство для привода скважинного штангового насоса | 1990 |
|
SU1809863A3 |
| Приводное устройство план-шайбы поворотно-делительного стола | 1976 |
|
SU663544A1 |
| РОЛИКО-ВИНТОВОЙ МЕХАНИЗМ | 2016 |
|
RU2631096C1 |
| ВАРИАТОР | 1990 |
|
RU2010140C1 |
| ЗУБЧАТАЯ ПЕРЕДАЧА С РЕГУЛИРУЕМЫМ ДИАМЕТРОМ ДЕЛИТЕЛЬНОЙ ОКРУЖНОСТИ | 1969 |
|
SU244599A1 |
| УСТРОЙСТВО ДЛЯ КОРРЕКЦИИ ПЕРЕДАТОЧНОГО ОТНОШЕНИЯ КИНЕМАТИЧЕСКОЙ ЦЕПИ ТОКАРНО-ВИНТОРЕЗНОГО СТАНКА | 1994 |
|
RU2069605C1 |
| ЧЕРВЯЧНЫЙ ИНСТРУМЕНТ, СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ, ОБОРУДОВАНИЕ ДЛЯ ЕГО ИЗГОТОВЛЕНИЯ И ЭКСПЛУАТАЦИИ | 1998 |
|
RU2169061C2 |
| СТАНОК ДЛЯ НАРЕЗАНИЯ ВИНТА С РАВНОМЕРНО- ПЕРЕМЕННЫМИ ШАГОМ И ШИРИНОЙ- ВИТКА И С ПОСТОЯННЫМ УГЛОМ ПОДЪЕМА | 1968 |
|
SU212708A1 |
| Зубодолбежный станок | 1987 |
|
SU1569118A1 |
Изобретение относится к машиностроению, в частности к механизмам для преобразования вращательного движения в возвратно-поступательное. Целью изобретения является повышение надежности. Указанная цель обеспечивается за счет иного выполнения кинематической связи гаек. Для этого гайка 4 имеет зубчатый венец 7 с внутренним зацеплением, а гайка 5 - зубчатый венец 8 с внешним зацеплением. При вращении винта 1 гайка 5, взаимодействующая с винтом 1, вращается в подшипниках 6, перемещая корпус 3 в осевом направлении. При зацеплении с винтом 1 гайки 4 корпус 3 перемещается в другую сторону, причем направление вращения винта 1 не изменяется. 1 ил.
Изобретение относится к машиностроению, в частности к механизмам для преобразования вращательного движения в возвратно-поступательное.
Известен винтовой механизм, который содержит винт, выполненный с кольцевыми выступами, расположенными перпендикулярно его оси, и установленные в поступательно перемещаемом корпусе две гайки с винтовой нарезкой противоположного направления, шаг которого равен шагу кольце- вых выступов винта, попеременно зацепляющиеся с винтом, оси которых параллельны оси винта, а диаметр делительных окружностей больше диаметра делительной окружности винта.
Недостатком механизма является то. что при реверсировании механизма в произвольном положении корпуса относительно винта выводимая из зацепления гайка находится в произвольном угловом положении и при последующем реверсировании
канавка винтовой нарезки этой гайки может не совпадать с кольцевыми выступами винта, а ввод гайки в зацепление с винтом, например, при остановленном приводе механизма становится невозможным.
Целью изобретения является повышение надежности работы.
Указанная цель достигается тем, что винтовой механизм содержит винт, выполненный с кольцевыми выступами, расположенными перпендикулярно его оси, и установленные в поступательно перемещаемом корпусе две гайки с винтовой нарезкой противоположного направления, шаг которой равен шагу кольцевых выступов винта, попеременно зацепляющиеся с винтом, оси которых параллельны оси винта, а диаметр делительных окружностей больше диаметра делительной окружности винта, причем гайки кинематически связаны друг с другом, а кинематическая связь выполнена в виде установленных на гайках зубчатых
g
О)
4 00
венцов и зубчатого колеса, предназначенного для зацепления с зубчатыми венцами гаек.
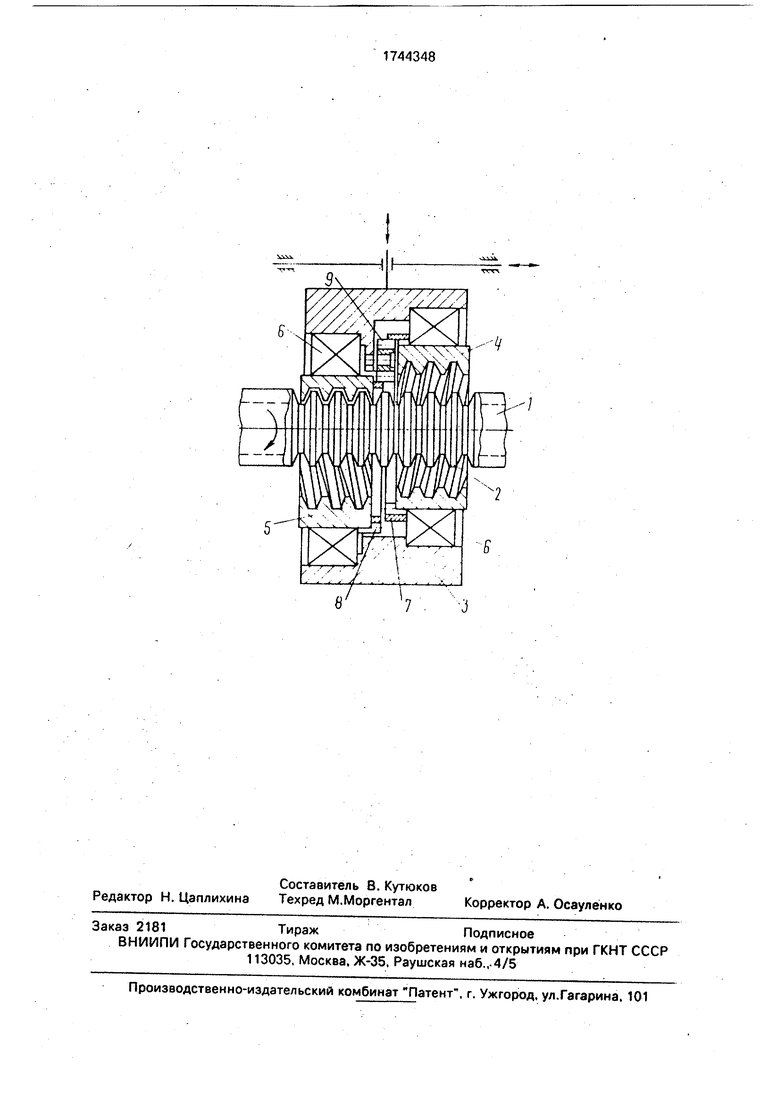
На чертеже схематически изображен описываемый винтовой механизм.
Механизм содержит винт 1, который выполнен с кольцевыми выступами 2, расположенными перпендикулярно его осис шагом, равным шагу винтовой нарезки гаек, корпус 3 и гайки 4.5, расположенные в поступательно перемещаемом корпусе 3, установленные в опорах качения 6 и имеющие винтовую нарезку противоположного направления. Гайки 4 и 5 расположены так, что их оси параллельны оси винта 1, а диаметры делительных окружностей больше диаметра делительной окружности винта 1, Гайки 4 и 5 попеременно зацепляются с винтом 1. Гайка 4 имеет зубчатый венец 7 с внутренним зацеплением, а гайка 5 - зубчатый венец 8 с внешним зацеплением . Зубчатые венцы 7 и 8 связаны с промежуточным зубчатым колесом 9.
Механизм работает следующим образом.
При вращении винта 1 гайка 5, взаимодействующая с винтом 1, вращается в подшипниках 6, перемещая корпус 3 в осевом направлении. При вращении гайки 5 одновременно вращается гайка 4, вращение на которую передается с гайки 5 через зубчатый венец 8, зубчатое колесо 9 и зубчатый венец 7. Так как гайки 4 и 5 имеют винтовую нарезку противоположного направления и
вращаются в противоположных направлениях, то сопрягаемые поверхности винтовой нарезки гайки 4 и кольцевых выступов 2 рсегда находятся в соответствующем их взаи,м,одействию положении. При зацеплении с винтом 1 гайки 4 корпус 3 перемещается в другую сторону, причем направление вра; щения винта 1 не изменяется.
Выполнение гаек кинематически связанными позволяет обеспечить гарантированное сопряжение гаек с винтом при реверсировании механизма.
Формула изобретения
Винтовой механизм, содержащий винт с кольцевыми выступами, корпус, установленный с возможностью поступательного перемещения, и установленные в корпусе в опорах качения с возможностью переменного зацепления с винтом две гайки с винтовой нарезкой противоположного направления, оси которых параллельны оси винта, диаметр делительных окружностей больше диаметра делительной окружности
винта, а шаг кольцевых выступов винта равен шагу винтовой нарезки гаек, отличающийся тем, что, с целью повышения надежности, гайки кинематически связаны одна с другой, а кинематическая связь выполнена в виде зубчатого венца внешнего зацепления на одной из гаек, зубчатого венца внутреннего зацепления на другой и зубчатого колеса, предназначенного для зацепления с зубчатыми венцами гаек.
| ВИНТОВОЙ МЕХАНИЗМ | 0 |
|
SU300685A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
