Изобретение относится к машиностроению и может быть использовано в приводах машин и механизмов в качестве регулируемой бесступенчатой передачи.
Импульсные регулируемые передачи (вариаторы) включают в свой состав следующие функционально связанные механизмы: генератор механических колебаний, регулирующий механизм и механизмы свободного хода (выпрямители механических колебаний). Вариаторы позволяют получать широкий диапазон регулирования скорости, однако имеют и существенные недостатки.
Во-первых, для них характерен большой коэффициент неравномерности хода выходного вала, что является негативным фактором за исключением специальных случаев. Для улучшения равномерности разработаны конструкции генераторов колебаний, которые обеспечивают в период рабочего хода приблизительно постоянную скорость движения ведомого звена, т.е. имеющих постоянное передаточное число на некотором угле поворота ведущего вала. Среди таких механизмов известны: механизм R-V-R (А.А.Благонравов. «Механические бесступенчатые передачи нефрикционного типа». - М., Машиностроение, 1977, с.108, рис.57), кулисные (А.А.Благонравов. «Механические бесступенчатые передачи нефрикционного типа». М., Машиностроение, 1977, с.108, рис.58), (А.с. 1260620 СССР, МКИ F16H 29/00), кулачковые (В.Ф.Мальцев. «Механические импульсные передачи». М., Машиностроение, 1978 с.27, рис.23), (А.с. 1321971 СССР, МКИ F16H 29/00), (А.с. 712572 СССР, МКИ F16H 29/00). Как разновидность кулачковых для улучшения равномерности вращения выходного вала разработаны генераторы с некруглыми зубчатыми колесами (А.с. 1414990 СССР, МКИ F16H 29/04), основанные на том же принципе - обеспечения приблизительно постоянной скорости в период рабочего хода выпрямителя (механизма свободного хода).
Другой путь снижения неравномерности движения ведомого вала заключается в установке на главных валах вариатора упругих звеньев (А.А.Благонравов. «Механические бесступенчатые передачи нефрикционного типа». М., Машиностроение, 1977), (А.с. 1425394 СССР, МКИ F16H 29/00).
Однако все упомянутые устройства обеспечивают равномерность движения лишь в определенной мере, оставляя ее зависимой от передаточного числа, а также от внешних условий работы бесступенчатой передачи.
Во-вторых, неуправляемый процесс включения и выключения механизмов свободного хода происходит под нагрузкой при относительном скольжении ведущих и ведомых звеньев, что ведет к быстрому выходу из строя этих деталей. Предлагаемые решения этого вопроса сводятся к конструктивным изменениям механизмов свободного хода с целью снижения давлений между трущимися поверхностями или снижения относительной скорости скольжения трущихся поверхностей (А.А.Благонравов. «Механические бесступенчатые передачи нефрикционного типа». - М., Машиностроение, 1977), (В.Ф.Мальцев. «Механические импульсные передачи». - М., Машиностроение, 1978), (А.И.Леонов. «Микрохраповые механизмы свободного хода». - М., Машиностроение, 1982). Но все конструкции выпрямителей не устраняют органически присущие им отмеченные выше недостатки.
В-третьих, вариаторы с механизмами свободного хода без принятия специальных мер могут передавать мощность только в одном направлении от двигателя к выходному валу, поэтому является затруднительным изменение направления передачи мощности в том случае, когда ведомый вал в процессе работы становится ведущим. Механическая импульсная передача (А.с. 712572 СССР, МКИ F16H 29/02) позволяет осуществлять реверсирование выходного вала, однако не устраняет другие недостатки вариаторов, отмеченные выше.
В-четвертых, во всех известных конструкциях вариаторов (в силу их принципа работы и компоновки) к механизмам свободного хода предъявляются очень высокие требования по массе и габаритам (удельной передаваемой мощности), что не позволяет создать работоспособный вариатор сколько-нибудь значительной мощности.
Наиболее близкой по конструктивным признакам к предлагаемой конструкции вариатора является импульсный вариатор (патент RU 2297565 от 4.10.2005), содержащий генератор механических колебаний, регулирующий механизм и выпрямитель, а также управляемые муфты, ведущие звенья которых связаны с ведомыми звеньями генератора, устройство включения-выключения управляемых муфт и механизм, суммирующий колебания скорости. При этом генератор вырабатывает колебательное движение ведомых звеньев с трапецеидальным законом изменения их скорости и фазами, последовательно смещенными друг относительно друга на четверть периода, а работа муфт синхронизирована с работой генератора. Такая конструкция позволяет принципиально преодолеть первые три недостатка импульсных вариаторов, но условия компоновки муфт лимитируют передаваемую мощность.
Для увеличения передаваемой мощности и повышения надежности работы (при сохранении всех отмеченных положительных качеств прототипа) импульсный вариатор, содержащий генератор механических колебаний, который вырабатывает две серии колебательных движений ведомых звеньев с трапецеидальным законом изменения скоростей и с фазами, смещенными друг относительно друга на четверть периода, регулирующий механизм и выпрямитель механических колебаний с суммирующим механизмом с двумя входными валами, дополнительно содержит в выпрямляющем механизме между каждым входным валом суммирующего механизма и выходным звеном генератора механических колебаний последовательно установленные суммирующий механизм и дифференциальный механизм.
Сумма таких однонаправленных колебаний является постоянной по величине (для установленного передаточного числа) и равной амплитудному значению колебаний. Для того чтобы получить однонаправленные колебания скорости, а затем суммировать их, каждый дифференциальный механизм содержит на каждом выходном валу управляемый тормоз. Управляемые тормоза включаются и выключаются синхронно в соответствии с фазами работы генератора с помощью устройства управления тормозами, работа которого синхронизирована с работой генератора механических колебаний.
Переключение тормозов происходит во время выстоя при нулевой скорости подвижных звеньев. Длительность периода переключения тормозов зависит от их свойств, которые известны, и должна быть учтена заранее при проектировании. В связи с этим буксование в тормозах отсутствует.
В период переключения тормозов обеспечивается постоянная связь (без разрыва кинематической цепи) ведомых и ведущих звеньев вариатора. Это позволяет вариатору передавать мощность в обоих направлениях.
Условия компоновки и работы управляемых тормозов в вариаторе гораздо менее жесткие, чем у управляемых муфт, и поэтому передаваемая вариатором мощность может быть значительной. Система управления тормозами может быть проще, чем муфтами, т.к. осуществляется на стационарно неподвижных звеньях.
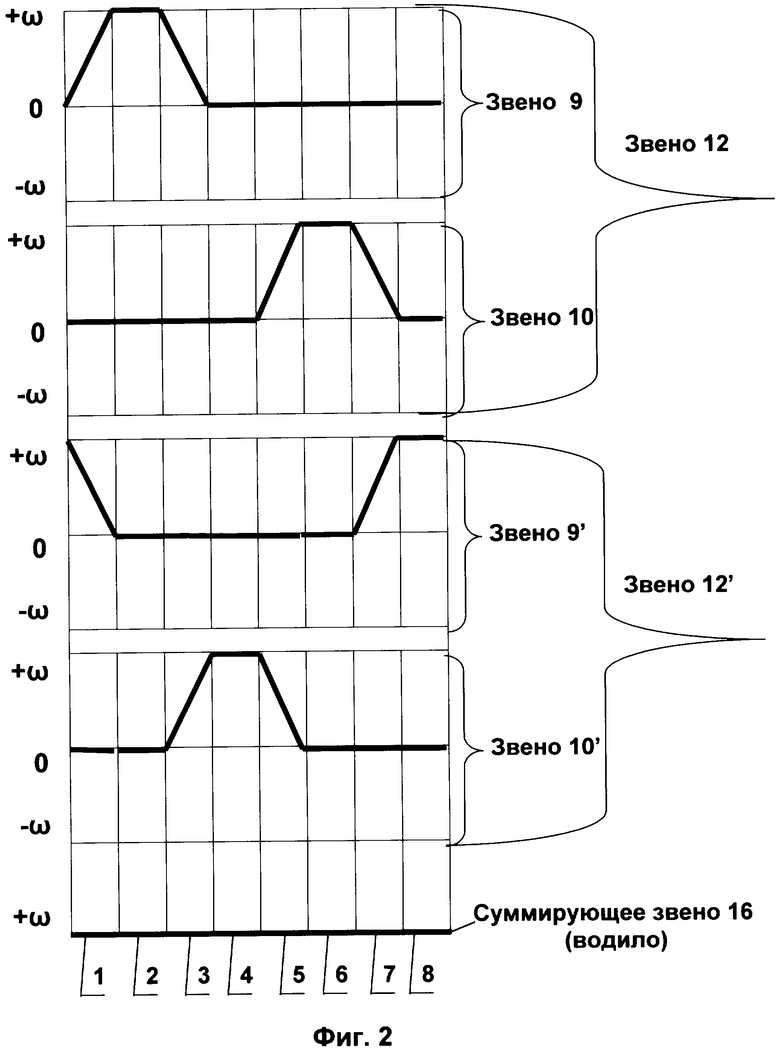
На фиг.1 показана схема импульсного вариатора.
На фиг.2 приведены графики изменения скоростей на валах выпрямляющего механизма.
Импульсный вариатор состоит из входного звена - кулачка 1, двуплечих толкателей 2 и 2', причем длина одного плеча толкателя, сопряженного с кулисой 3 (3'), может изменяться при помощи специального механизма (В.Ф.Мальцев «Механические импульсные передачи» М., Машиностроение, 1978) не показанного на схеме. Кулиса 3 (3') жестко соединена с зубчатой рейкой 4 (4'), совершающей возвратно-поступательное движение. В зацеплении с рейкой находится зубчатое колесо, образующее звено 5 (5') с водилом дифференциального механизма. Звено 5 (5') образует вращательную кинематическую пару с блоком сдвоенных сателлитов 6 (6'). Эти сателлиты образуют зацепление с центральными колесами 7 (7') и 8 (8') дифференциального механизма. На одном валу с зубчатым колесом 7 (7') жестко установлено центральное колесо 9 (9') суммирующего механизма и тормоз 15 (15'), а на одном валу с зубчатым колесом 8 (8') жестко установлено центральное колесо 10 (10') суммирующего механизма и тормоз 14 (14'). В зацепление с колесами 9 (9') и 10 (10') входит блок сателлитов 11 (11') суммирующего механизма. Этот блок сателлитов образует вращательную кинематическую пару с водилом 12 (12') суммирующего механизма. В свою очередь водило 12 (12') образует звено с центральным колесом 13 (13') симметричного суммирующего механизма. Водило 16 этого механизма является выходным звеном вариатора.
На фиг.2 изображены диаграммы скоростей звеньев 9, 10, 12 и 9', 10', 12' и водила суммирующего механизма 16 за один период движения вариатора. Сплошной горизонтальной линией изображена скорость движения водила 16 симметричного суммирующего механизма как сумма участков диаграмм, принадлежащих указанным выше звеньям. На фиг.2 цифрами от 1 до 8 обозначены характерные участки диаграмм, соответствующие фазам движения звеньев.
При вращении кулачка 1 движение от него передается толкателям 2 и 2', совершающим вращательно-колебательное движение. Толкатели расположены так, что фазы их колебаний смещены друг относительно друга на четверть периода. Толкатели сообщают возвратно-поступательное движение кулисам 3 и 3'. Причем амплитуда колебаний кулисы может изменяться за счет изменения длины плеча толкателя, сопряженного с кулисой. Вместе с кулисами перемещаются зубчатые рейки 4 и 4', сообщая движение звеньям 5 и 5'. Благодаря свойствам кулисного механизма при изменении длины плеча двуплечего толкателя изменяется амплитуда колебаний реек, но трапецеидальный вид колебаний их скоростей не изменяется. От звена 5 (5') через сателлиты 6 (6') дифференциального механизма движение передается либо колесу 7 (7'), либо 8 (8') в зависимости от того, какое из них свободно, а какое заторможено тормозом 15 (15') или 14 (14'). Скорости вращения колес 7 (7') и 8 (8') суммируются на водиле 12 (12') суммирующего механизма. При этом числа зубьев зубчатых колес дифференциального и суммирующего механизма подобраны так, что передаточные отношения в кинематических цепях звеньев 5-6-7-9-11-12 (5'-6'-7'-9'-11'-12') и 5-6-8-10-11-12 (5'-6'-8'-10'-11'-12') равны по абсолютной величине, но противоположны по знаку. Поэтому звенья 12 и 12' вращаются в одном направлении, хотя звенья 5 и 5' совершают колебательное движение. За счет формы профиля кулачка диаграммы скоростей движения этих звеньев имеют трапецеидальный вид, указанный на фиг.2. В свою очередь скорости движения звеньев 12 и 12' суммируются симметричным суммирующим механизмом, и водило 16 движется равномерно с заданной наперед скоростью.
На первой фазе движения (фиг.2) зубчатое колесо 10 остановлено тормозом14, а колесо 10' остановлено тормозом 14'. При этом скорость колеса 9 изменяется от 0 до +ω, а скорость колеса 9' от +ω до 0. Скорости колес 9 и 10 складываются на выходном звене 12 суммирующего механизма, а скорости колес 9' и 10' складываются на выходном звене 12' суммирующего механизма. В свою очередь скорости звеньев 12 и 12' складываются симметричным суммирующим механизмом и его водило движется с постоянной скоростью +ω.
На второй фазе движения звено 9 движется с постоянной скоростью +ω. Звено 10 остановлено тормозом 14. Звенья 9' и 10' неподвижны вследствие выстоя звена 2'. В это время тормоз 14' выключается и звено 10' растормаживается, а тормоз 15' включается и звено 9' затормаживается. Сумма скоростей звеньев 9, 10, 9' и 10' равна +ω и равна скорости водила 16.
На третьей фазе движения скорость звена 9 изменяется линейно от +ω до 0. Звено 10 остановлено тормозом 14, а звено 9' остановлено тормозом 15'. Скорость звена 10' изменяется от 0 до +ω. Сумма скоростей звеньев 9, 10, 9' и 10' равна +ω и равна скорости выходного звена вариатора 16.
На четвертой фазе движения звено 10' движется с постоянной скоростью +ω. Звено 9' остановлено тормозом 15'. Звенья 9 и 10 неподвижны вследствие выстоя звена 2. В это время тормоз 14 выключается и звено 10 растормаживается, а тормоз 15 включается и звено 9 затормаживается. Сумма скоростей звеньев 9, 10, 9' и 10' равна +ω и равна скорости выходного звена вариатора 16.
Во второй половине движения периода на фазах 5, 6, 7 и 8 работа вариатора осуществляется аналогично описанной выше. Таким образом, скорость движения выходного звена вариатора - водила 16 в течение всего периода является постоянной, наперед заданной, равной +ω.
Переключение тормозов происходит синхронно с работой генератора в течение времени, которое заранее может быть определено при проектировании. Звенья тормозов на фазе переключения остаются неподвижными и потерь мощности на буксование нет. Механическая связь между звеньями вариатора постоянно сохраняется, поэтому вариатор позволяет передавать движение в обоих направлениях.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМПУЛЬСНЫЙ ВАРИАТОР С УПРАВЛЯЕМЫМИ ПЕРЕХОДНЫМИ РЕЖИМАМИ | 2009 |
|
RU2400661C1 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 2005 |
|
RU2297565C1 |
| ВЫСОКОМОМЕНТНЫЙ ВАРИАТОР НЕФРИКЦИОННОГО ТИПА | 2005 |
|
RU2313019C2 |
| КОЛЕБАТЕЛЬНЫЙ МЕХАНИЗМ НЕФРИКЦИОННОГО ВАРИАТОРА | 2003 |
|
RU2250400C1 |
| КОРОМЫСЛО-КУЛИСНЫЙ КОЛЕБАТЕЛЬНЫЙ МЕХАНИЗМ НЕФРИКЦИОННОГО ВЫСОКОМОМЕНТНОГО ВАРИАТОРА | 2021 |
|
RU2757327C1 |
| КОЛЕБАТЕЛЬНЫЙ МЕХАНИЗМ ДЛЯ ВЫСОКОМОМЕНТНОГО ВАРИАТОРА | 2003 |
|
RU2263240C2 |
| КУЛИСНЫЙ КОЛЕБАТЕЛЬНЫЙ МЕХАНИЗМ ВЫСОКОМОМЕНТНОГО ВАРИАТОРА НЕФРИКЦИОННОГО ТИПА | 2022 |
|
RU2788238C1 |
| Импульсная изменяемая передача вращения | 2016 |
|
RU2629765C2 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2620278C2 |
| ВЫПРЯМИТЕЛЬ КОЛЕБАНИЙ ВЫСОКОМОМЕНТНОГО ВАРИАТОРА НЕФРИКЦИОННОГО ТИПА | 2009 |
|
RU2409780C1 |
Изобретение относится к машиностроению и может быть использовано в приводах машин и механизмов в качестве регулируемой бесступенчатой передачи. Импульсный вариатор содержит генератор механических колебаний, регулирующий механизм и выпрямляющий механизм. Выпрямляющий механизм дополнительно содержит суммирующие и дифференциальные механизмы с тормозами на ведомых валах, устройство включения-выключения управляемых тормозов. Генератор вырабатывает колебательное движение ведомых звеньев с трапецеидальным законом изменения их скорости и фазами, последовательно смещенными друг относительно друга на четверть периода, а работа тормозов синхронизирована с работой генератора. Изобретение позволяет увеличить передаваемую мощность и повысить надежность работы вариатора. 1 з.п. ф-лы, 2 ил.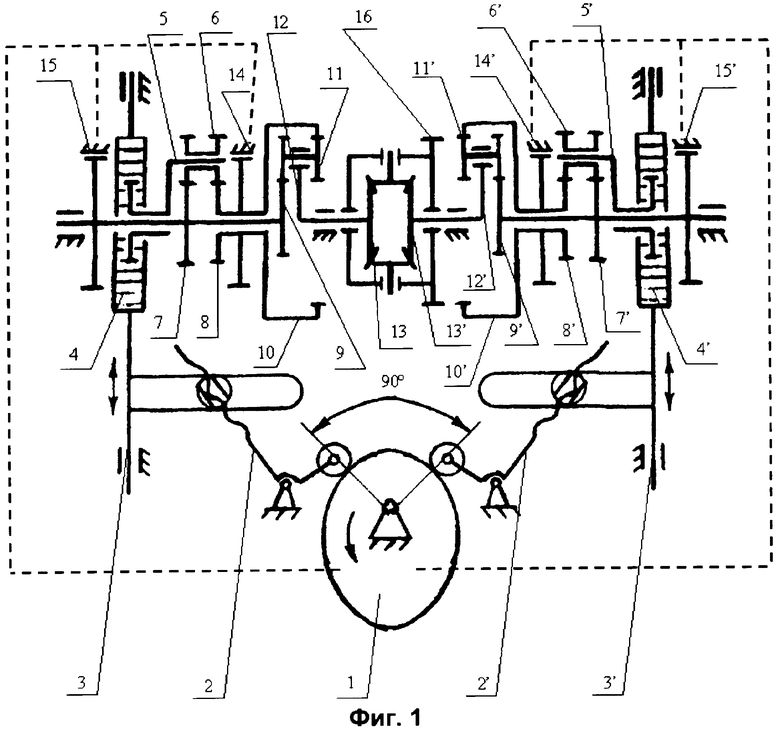
| ИМПУЛЬСНЫЙ ВАРИАТОР | 2005 |
|
RU2297565C1 |
| Кулачковый импульсный вариатор | 1977 |
|
SU712577A1 |
| Инерционный трансформатор вращающего момента | 1977 |
|
SU643692A1 |

