Изобретение относится к лазерной доплеровской локации и может быть использовано при синтезе устройств обработки информации о местоположении и скорости низколетящих ракет морского базирования с помощью лазерных доплеровских локаторов с непрерывным режимом излучения и растровым сканированием по угловым координатам.
Известен способ лазерной доплеровской локации низколетящих над морской поверхностью ракет [1-5] путем приема бликовых переотражений лазерного излучения, рассеиваемого облученной летящей ракетой, и обработки информации для группы бликовых переотражений с последующим статистическим усреднением измеряемых параметров - угловых координат, дальности, высоты полета и скорости ракеты.
Известный способ локации [1] основан на зондировании дифракционно ограниченного объекта, движущегося над поверхностью моря (океана), немодулированными излучениями одночастотного лазера непрерывного действия и многоканальной когерентной обработке принимаемых излучений матричным фотоприемным устройством с определением доплеровских сдвигов частоты в переотраженном излучении и последующей многоканальной параллельной согласованной фильтрацией выделенных радиосигналов. Способ отличается тем, что когерентному приему и обработке дополнительно и одновременно подвергают отраженные от нескольких бликов морской поверхности излучения, поступающие на фотоприемную матрицу с разных произвольно распределенных угловых направлений, определяют в соответствующих каналах, связанных с матричным фотоприемным устройством, доплеровские сдвиги частоты в принятых излучениях от бликов морской поверхности и соответствующие им угловые координаты на эти морские блики, вычисляют текущие координаты местоположения объекта и его истинную скорость, а также статистически усредняют полученные результаты вычислений всей совокупности совместных измерений указанных параметров. По этому способу функционируют соответствующие локационные устройства [2-5].
Целью заявляемого изобретения является установление статистики групповых бликовых переотражений лазерного излучения от облучаемой морской поверхности, в частности, определение вероятности одновременного действия двух и более бликовых переотражений по критерию их длительности в различных условиях волнения морской поверхности от штиля до бури.
Указанная цель достигается в заявляемом устройстве для регистрации статистического распределения групповых бликовых отражений лазерного излучения морской поверхностью, содержащем одночастотный лазер непрерывного излучения, приемный объектив, в приемном тракте которого использована фоточувствительная матрица, связанная с многоканальным блоком обработки принимаемых сигналов, отличающемся тем, что лазерное излучение направлено на тот или иной участок морской поверхности, а его часть также воздействует на фоточувствительную матрицу, каждый канал многоканального блока обработки информации после канальных усилителя, амплитудного детектора и порогового устройства с регулируемым порогом по минимуму включает канальное запоминающее устройство, фиксирующее длительность принятого сигнала и момент времени начала регистрируемого интервала времени существования принятого сигнала, а также отображающее эти временные параметры в двоичном коде, а выходы канальных запоминающих устройств воздействуют на интерфейс персонального компьютера с регистрирующим дисплеем, связанным с таймером, выход таймера подключен к дополнительным входам канальных запоминающих устройств.
Устройство отличается тем, что каждое канальное запоминающее устройство многоканального блока обработки информации состоит из последовательно соединенных измерителя временного интервала действия принимаемого сигнала и кодирующего устройства, а интерфейс персонального компьютера включает быстродействующее устройство последовательного опроса кодовых данных канальных запоминающих устройств.
Достижение поставленной цели изобретения объясняется фиксацией времени действия принимаемого сигнала и его длительности по всем ячейкам фоточувствительной матрицы, работающей в режиме гомодинного приема, с последующим сопоставлением этих измерений в персональном компьютере, в результате чего устанавливается частота образования групп из двух и более совпадающих интервалов действия принимаемых сигналов при различных заданных интервалах совпадения и различных условиях волнения морской поверхности. Эти данные отображаются в форме графиков на дисплее после соответствующего времени усреднения данных, а также запоминаются в базе данных персонального компьютера.
Устройство поясняется прилагаемым рисунком, включающим:
1 - одночастотный лазер непрерывного излучения,
2 - приемный объектив,
3 - формирователь гомодинного канала - делительную оптическую ячейку,
4 - глухие отражатели,
5 - фоточувствительную матрицу,
6 - многоканальный блок обработки информации, содержащий следующие элементы в каждом из каналов (по числу ячеек фоточувствительной матрицы):
7 - канальный усилитель,
8 - канальный амплитудный детектор,
9 - канальное пороговое устройство с регулируемым порогом по минимуму,
10 - канальное запоминающее устройство, состоящее из элементов:
11 - измеритель временного интервала действия принимаемого сигнала,
12 - кодирующее устройство (код интервала и момента времени начала этого интервала).
Кроме того, устройство включает:
13 - таймер текущего времени,
14 - интерфейс персонального компьютера,
15 - персональный компьютер с дисплеем.
Рассмотрим работу заявляемого устройства.
Одночастотный лазер непрерывного излучения 1, частично отражаясь формирователем гомодинного канала - делительной оптической ячейкой 3 с большим пропусканием и малым отражением, а также отражаясь через соответствующие глухие отражатели 4, освещает участок морской поверхности. За счет волнения морской поверхности образуются бликовые отражения, воздействующие на приемный объектив 2, содержащий основную линзу с большой апертурой и с малым центральным отверстием, а также дополнительную малоапертурную линзу гомодинного канала, совмещенную с оптической осью приемного объектива. Гомодинное излучение образовано с помощью делительной оптической ячейки 3, глухого отражателя 4, расположенного перед отверстием в линзе приемного объектива, и дополнительной малоапертурной линзой, формирующей пучок, падающий на все mn элементов фотоприемной матрицы 5, на элементы которой воздействует излучение, отраженное от бликов морской поверхности. Фотоприемная матрица 5 содержит m столбцов и n строк, и их число определяет разрешающую способность устройства по угловым координатам - соответственно углу места и азимуту. Она расположена в фокальной плоскости приемного объектива. Одновременно ячейки фотоприемной матрицы 5 могут регистрировать бликовые отражения от различных участков морской поверхности. Поэтому дальнейшая обработка информации о принятой группе сигналов осуществляется в многоканальном блоке обработки информации 6, число каналов в котором равно mn. Все каналы идентичны и содержат последовательно включенные канальные усилители 7, канальные амплитудные детекторы 8, канальные пороговые устройства с регулируемым порогом по минимуму 9 и канальные запоминающие устройства 10, причем последние включают последовательно соединенные измерители временных интервалов действия принимаемых сигналов 11 и кодирующие устройства 12, с помощью которых формируются коды длительности интервалов действия принимаемых сигналов и моменты текущего времени, задаваемого таймером 13, связанные с началами временных интервалов действия принимаемых сигналов. Кодирование этих величин производится, например, в двоичном коде. Опрос кодовых комбинаций со всех каналов блока обработки информации 6 осуществляется интерфейсом 14 персонального компьютера 15, на который подается сигнал текущего времени с таймера 13 также в двоичном коде. С помощью персонального компьютера 15 производится по соответствующей программе обработка принимаемых кодовых последовательностей с выхода интерфейса 14, который опрашивает информацию со всех mn ячеек фотоприемной матрицы 5 с высокой скоростью. После цикла опроса кодовая информация в канальных запоминающих устройствах 10 стирается и они готовы для последующих записей новой информации. Интервал цикла опроса всех mn ячеек фоточувствительной матрицы 5 выбран так, что он превышает наиболее длинный по времени интервал бликового отражения, чтобы не утратить информацию о размере этого интервала стиранием полученной кодовой информации. Например, если наиболее длинный по времени интервал действующего блика равен ΔТMAX, то время опроса каждой ячейки фоточувствительной матрицы Δt должно удовлетворять очевидному неравенству Δt≤ΔТMAX/mn. Так, если ΔТMAX=5 мс, то при mn=105 (при m=250 и n=400) получим Δt<50 нс. Это означает, что полоса пропускания фоточувствительных ячеек и усилителей 7 должна быть не хуже ΔF=20 МГц, что вполне согласуется с современными техническими возможностями фотоприемных устройств, например, выполненных на охлаждаемом жидким азотом соединении КРТ (кадмий-ртуть-теллур) при использовании СO2 одночастотных лазеров непрерывного действия (с длиной волны 10,6 мкм). Повышению пороговой чувствительности таких фотоприемных устройств способствует их работа в гомодинном режиме фотосмешения. Известные фотоприемные устройства на КРТ для диапазона 10,6 мкм имеют полосу пропускания порядка 100 МГц и выше, что позволяет увеличить число ячеек mn фоточувствительной матрицы 5 до 106 и выше. Это позволяет увеличить разрешающую способность устройства по угловым координатам.
Формирование кодов в кодирующих устройствах 12 должно завершаться за время порядка Δt≤50 нс для рассмотренного выше примера, что также легко осуществимо. Если такт работы таймера текущего времени 13 принять равным 50 нс, то легко понять, что максимально возможный двоичный код интервала времени действия принимаемого сигнала бликового отражения имеет размер числа mn. Для рассматриваемого примера при mn=10 число двоичных разрядов для отображения интервалов времени и момента текущего времени, сопряженного с началом этого интервала времени, равно k=2log2 (mn), то есть для данного примера имеем k=34 (17 двоичных разрядов для отображения интервала времени действия сигнала и 17 разрядов для отображения момента времени начала измеряемого интервала времени). Разрядность в кодирующих устройствах 12 может быть снижена, если снизить требования по разрешающей способности по времени. Например, на порядок, то есть с временным разрешением 0,5 мкс. Тогда число разрядов в кодирующих устройствах снизится до величины k=2log2(mn/10)=26 (по 13 разрядов для двух измеряемых величин).
В персональном компьютере 15 происходит обработка полученной информации о времени регистрации бликовых отражений и длительности этих бликов. При этом решается вопрос, сколько бликовых отражений перекрывается по времени, какова длительность времени перекрытия для пары бликовых сигналов, для трех и более одновременно действующих бликовых отражений и каково время перекрытия для таких групп бликовых отражений. Эта информация является важной для построения лазерных доплеровских локаторов, действие которых основано на заявленном ранее способе [1]. Эта информация накапливается в базе данных персонального компьютера (в его жестком диске) для различных условий волнения морской поверхности - от штиля до бури.
Заявляемое устройство чрезвычайно эффективно для доказательства перспектив внедрения таких локаторов в интересах ВМФ страны, которые позволяют определять местоположение и скорость движения низколетящих крылатых ракет морского базирования типа «Гарпун», которые были применены в 2008 году в грузинском конфликте, в котором, к сожалению, нами использовалась старая радиолокационная техника для отражения нападения на Абхазию на большом расстоянии (порядка 15 км). Существующие лазерные импульсные локаторы также позволяют измерять местоположение и скорость ракеты, но при этом в таких локаторах используются электрооптические модуляторы лазерного излучения, например, для получения линейно-частотно-модулированных (ЛЧМ) сигналов, допускающих их спектро-временное «сжатие». При этом снижается энергетический потенциал таких локаторов из-за потерь в указанных модуляторах. В то же время локаторы, основанные на заявленном способе [1], используют полезно практически всю излучаемую мощность непрерывного излучения (ответвление части излучения на канал гомодинного приема ничтожно), так что сопоставление энергетики импульсных локаторов с ЛЧМ излучением и предлагаемых автором доплеровских локаторов с использованием бликовых переотражений от морской поверхности указывает на преимущество последних. При этом важно накопить данные о статистике распределений групповых бликовых отражений лазерного излучения, например, одночастотного СO2 лазера, морской поверхностью. Такое накопление осуществляется с помощью заявляемого устройства.
Литература
1. Меньших О.Ф. Способ локации. Патент РФ №2296350, опубл. в бюлл. №9 от 27.03.2007.
2. Меньших О.Ф. Лазерный доплеровский локатор. Патент РФ №2335785, опубл. в бюлл. №28 от 10.10.2008.
3. Меньших О.Ф. Лазерный когерентный локатор. Патент РФ №2352958, опубл. в бюлл. №11 от 20.04.2009.
4. Меньших О.Ф. Способ лазерного гетеродинного приема излучений. Патент РФ №2349930, опубл. в бюлл. №8 от 20.03.2009.
5. Меньших О.Ф. Способ обработки информации в лазерном когерентном локаторе с матричным фотоприемником. Патент РФ №2354994, опубл. в бюлл №13 от 10.05.2009.
Источники патентной информации
RU 2012013 С1, 30.04.1994; RU 2152056 C1, 27/06/2000;
GB 1318475 A, 31.05.1973; US 3765768 A, 16.10.1973;
JP 56143974 A, 10.11.1981.
Устройство содержит одночастотный лазер непрерывного излучения, приемный объектив, в приемном тракте которого использована фоточувствительная матрица, связанная с многоканальным блоком обработки принимаемых сигналов. Лазерное излучение направлено на тот или иной участок морской поверхности, а его часть также воздействует на фоточувствительную матрицу. Каждый канал многоканального блока обработки информации после канальных усилителя, амплитудного детектора и порогового устройства с регулируемым порогом по минимуму включает канальное запоминающее устройство, фиксирующее длительность принятого сигнала и момент времени начала регистрируемого интервала времени существования принятого сигнала, а также отображающее эти временные параметры в двоичном коде. Выходы канальных запоминающих устройств воздействуют на интерфейс персонального компьютера с регистрирующим дисплеем, связанным с таймером, а выход таймера подключен к дополнительным входам канальных запоминающих устройств. Технический результат заключается в обеспечении возможности установления статистики групповых бликовых переотражений лазерного излучения от облучаемой морской поверхности, в различных условиях волнения морской поверхности от штиля до бури. 1 з.п. ф-лы, 1 ил.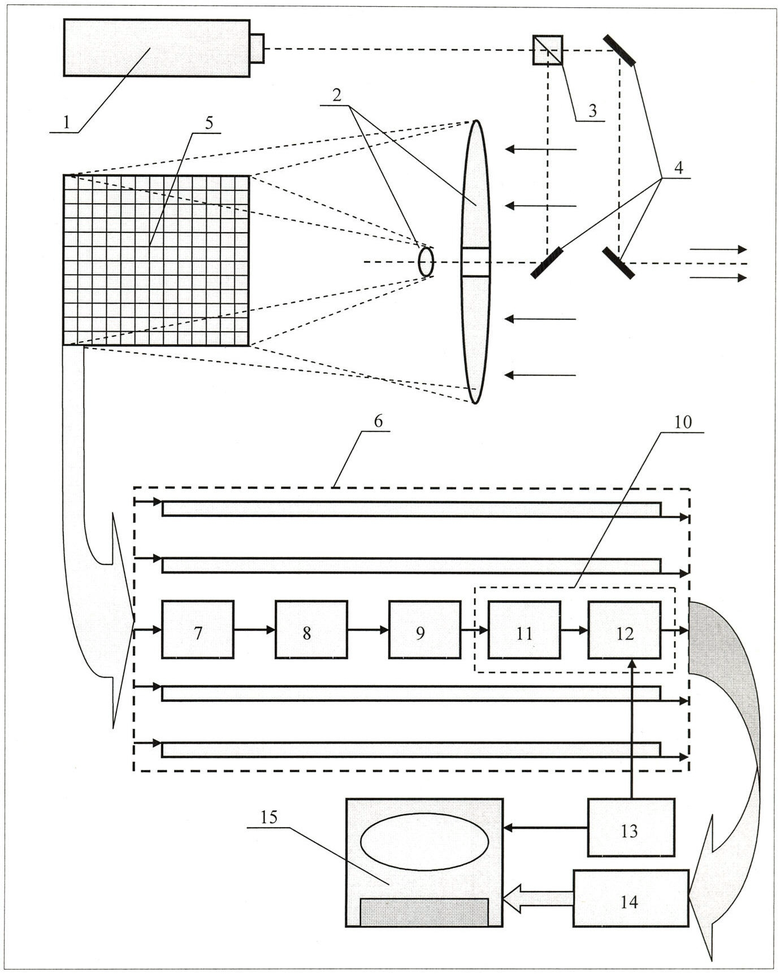
1. Устройство для регистрации статистического распределения групповых бликовых отражений лазерного излучения морской поверхностью, содержащее одночастотный лазер непрерывного излучения, приемный объектив, в приемном тракте которого использована фоточувствительная матрица, связанная с многоканальным блоком обработки принимаемых сигналов, отличающееся тем, что лазерное излучение направлено на тот или иной участок морской поверхности, а его часть также воздействует на фоточувствительную матрицу, каждый канал многоканального блока обработки информации после канальных усилителя, амплитудного детектора и порогового устройства с регулируемым порогом по минимуму включает канальное запоминающее устройство, фиксирующее длительность принятого сигнала и момент времени начала регистрируемого интервала времени существования принятого сигнала, а также отображающее эти временные параметры в двоичном коде, а выходы канальных запоминающих устройств воздействуют на интерфейс персонального компьютера с регистрирующим дисплеем, связанным с таймером, выход таймера подключен к дополнительным входам канальных запоминающих устройств.
2. Устройство по п.1, отличающееся тем, что каждое канальное запоминающее устройство многоканального блока обработки информации состоит из последовательно соединенных измерителя временного интервала действия принимаемого сигнала и кодирующего устройства, а интерфейс персонального компьютера включает быстродействующее устройство последовательного опроса кодовых данных канальных запоминающих устройств.
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР | 2007 |
|
RU2352958C1 |
| СПОСОБ ЛОКАЦИИ | 2005 |
|
RU2296350C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ В ЛАЗЕРНОМ КОГЕРЕНТНОМ ЛОКАТОРЕ С МАТРИЧНЫМ ФОТОПРИЕМНИКОМ | 2007 |
|
RU2354994C1 |
| EP 1358508 A1, 05.11.2003 | |||
| US 4995102 A, 19.02.1991. | |||

