Изобретение относится к области технической физики и может быть использовано при разработке лазерных локационных систем морского базирования применительно к обнаружению и измерению угловых координат, радиальной и истинной скорости, наклонной дальности и высоты полета низколетящих над уровнем моря крылатых ракет.
Среди различных схем и способов построения лазерных локаторов наиболее перспективными представляются схемы с когерентным приемом при панорамном обзоре пространства с использованием непрерывного излучения одночастотного лазера без использования модуляции, что позволяет получить наибольшую величину произведения энергетического потенциала локатора на его быстродействие сканирования по угловым координатам (азимуту и углу места) при высокой точности измерения угловых координат и радиальной скорости. Последнее обеспечивается при построении лазерных доплеровских систем с использованием когерентной обработки с фотосмешением в высокочувствительных фотоприемниках, например, на основе охлаждаемых жидким азотом тройных соединений «кадмий-ртуть-теллур» (КРТ) для излучений СО2-лазеров. Однако для измерения наклонной дальности в лазерных локаторах традиционно используют либо импульсный режим излучения, либо применяют широкополосные сигналы, например, псевдослучайные последовательности или линейно-частотно-модулированные по треугольному закону сигналы с последующей их оптимальной обработкой в радиотракте на основе дисперсионных линий задержки или линий с длительным взаимодействием [1-10].
Согласованная фильтрация указанных широкополосных сигналов, оптимизирующая отношение сигнал/шум на выходе решающего устройства в радиотракте обработки сигналов может быть обеспечена для любого типа применяемых сигналов - как простых немодулированных узкополосных, так и сложных широкополосных. Максимальное значение отношения сигнал/шум на выходе оптимального (согласованного) фильтра, как известно, определяется из соотношения μmax=(2Еc/Gш)1/2, где Ес - энергия принятого сигнала, Gш - спектральная плотность шума.
При работе локатора в режиме панорамного обзора использование непрерывного излучения позволяет существенно увеличить скорость углового сканирования при обнаружении малоразмерного объекта, рассматриваемого как дифракционно ограниченный (точечный) объект.
Отметим, что при использовании энергетического (некогерентного) приема при сверхкоротких (для повышения разрешающей способности по дальности) мощных импульсных зондирующих сигналах несколько упрощается аппаратурная часть локатора в приемном тракте, но осложняется в передающем необходимостью использования импульсных модуляторов (внешних или внутренних по отношению к излучающему лазеру). Для когерентного приема энергетический потенциал локатора инвариантен относительно изменения длительности зондирующего излучения при сохранении неизменньм произведения длительности излучения на его мощность и фактора когерентности. Иначе говоря, энергетический потенциал в когерентном локаторе определяется энергией принятого излучения вне зависимости от того, каков характер последнего - импульсный или непрерывный, но при сохранении когерентности принятого излучения, поскольку это требование связано с использованием режима фотосмешения в фотоприемном устройстве (ФПУ). Это условие наиболее естественно выполняется именно при непрерывном режиме излучения одночастотного лазера. В этом режиме также отсутствует опасность пропуска объекта локации при панорамном обзоре со сканированием по угловым координатам.
Известные локационные системы с непрерывным и немодулированным излучением широко используются для целей обнаружения и измерения радиальной скорости объектов с одновременным измерением их угловых координат. Однако таким доплеровским системам присущ важный недостаток - невозможность одновременного измерения наклонной дальности до объекта, так как решение задачи дальнометрии требует применения модуляции излучения по амплитуде, частоте, фазе или поляризации, что уширяет спектр излучаемого сигнала, разрушая, в известной степени, его когерентность. Это приводит к двухэтапной обработке сигналов: на первом этапе решается задача обнаружения объекта, измерение его угловых координат и радиальной скорости, на втором этапе в режиме автоматического сопровождения движущегося объекта по угловым координатам решается соответствующая дальнометрическая задача введением модуляции излучения лазера. При этом использование одночастотных СО2-лазеров с непрерывным излучением и возможностью внутренней частотной модуляции (например, вариацией длины резонатора в заданных возможных пределах с помощью пьезокорректоров) [11-13] совместно с одночастотным лазером-гетеродином непрерывного излучения с системой автоподстройки частоты [14-16] является удовлетворительным, хотя и непростым решением задачи обнаружения и измерения всего комплекса параметров лоцируемого объекта. Локационные системы с указанной двухэтапной работой предпочтительны в тех наиболее часто встречающихся случаях, когда объект локации приближается к локационному устройству, так как при этом такой объект сначала обнаруживается и распознается по признаку радиальной скорости на дальних рубежах, а затем измеряется его наклонная дальность в режиме автосопровождения по угловым координатам, когда улучшающаяся энергетика отраженного сигнала позволяет проводить измерение дальности с заданной точностью.
Ближайшим аналогом (прототипом) заявляемого технического решения - способа локации - является способ, основанный на непрерывном излучении с последующей когерентной обработкой принятого излучения в режиме фотосмешения с выделением на выходе ФПУ доплеровского сдвига частоты, величина которого определяет радиальную скорость обнаруженного объекта локации, например ракеты или иного дифракционно ограниченного объекта (см., например, ...[17-18]). При этом ФПУ может выполняться в виде одностолбцовой матрицы с параллельной обработкой в вертикальной (угломестной) плоскости и с круговым (азимутальным) сканированием.
Недостатком указанного известного способа доплеровской локации является невозможность измерения наклонной дальности до объекта при немодулированном непрерывном излучении одночастотного лазера. Указанный недостаток устраняется в заявляемом техническом решении.
Целью изобретения является обеспечение возможности одновременного обнаружения дифракционно ограниченного объекта, измерения его угловых координат, радиальной и истинной скорости, наклонной дальности и высоты его полета над уровнем моря применительно к задачам противодействия крылатым ракетам морского базирования при непрерывном немодулированном излучении одночастотного лазера с когерентной обработкой принятого излучения.
Указанная цель достигается в способе локации, основанном на зондировании дифракционно ограниченного объекта, движущегося над поверхностью моря (океана), немодулированными излучениями одночастотного лазера непрерывного действия и многоканальной когерентной обработке принимаемых излучений матричным фотоприемным устройством с определением доплеровских сдвигов частоты в переотраженном излучении и последующей многоканальной параллельной согласованной фильтрацией выделенных радиосигналов, отличающемся тем, что когерентному приему и обработке дополнительно и одновременно подвергают отраженные от нескольких бликов морской поверхности излучения, поступающие на фотоприемную матрицу с разных произвольно распределенных угловых направлений, определяют в соответствующих каналах, связанных с матричным фотоприемным устройством, доплеровские сдвиги частоты в принятых излучениях для переотраженных от бликов морской поверхности сигналов и соответствующие им угловые координаты на эти морские блики, вычисляют текущие координаты местоположения объекта и его истинную скорость, а также статистически усредняют полученные результаты вычислений всей совокупности совместных измерений указанных параметров.
Указанная цель в заявляемом способе локации достигается благодаря использованию, кроме сигнала прямого отражения от объекта, создающего вокруг себя вторичную квазисферическую волну переизлучения, нескольких переотраженных от бликов морской поверхности и освещенных указанной волной переотражения от объекта сигналов, выделяющихся в соответствующих каналах матричного фотоприемного устройства и обрабатываемых параллельно в канальных согласованных фильтрах, с помощью которых определяют доплеровские сдвиги частоты зондирующего излучения для прямого и дополнительных - бликовых каналов. Различие частот доплеровских сдвигов в разных каналах обработки связано с различием углов, под которыми освещаются вторичной волной переизлучения видимые фотоприемной матрицей морские блики в зоне нахождения лоцируемого объекта, наличием самих бликов морской поверхности, создающих зеркальное отражение падающего на них вторичного переизлучения от движущегося объекта. Поскольку лоцируемый объект находится в движении, а распределение бликов морской поверхности является стохастическим, задача измерения наклонной дальности и высоты полета объекта над поверхностью моря требует применения аппарата статистического усреднения совокупности измерений и их временной привязки из-за случайности моментов времени появления бликовых сигналов и их продолжительности.
Операционная сущность заявляемого технического решения будет понятной из рассмотрения представленных чертежей.
На фиг.1 изображена одна из возможных ситуаций облучения точечного объекта (например, крылатой ракеты морского базирования) локатором с известными его местоположением и угловой ориентацией на обнаруженный им объект. Кроме прямого переотражения указаны два других действующих переотражения от разных бликов морской поверхности, лежащих, для простоты рассмотрения, в одной плоскости с прямым переотражением от объекта. Указаны углы, под которыми объект освещает действующие блики морской поверхности по отношению к линии прямого переотражения. На фиг.1 усматривается, что эти углы однозначно связаны с величинами регистрируемых доплеровских сдвигов частоты для отраженных от указанных морских бликов вторичных излучений по сравнению с доплеровским сдвигом частоты для прямого отраженного от объекта сигнала. Это позволяет расчетным путем на основе геометрических построений найти искомые величины наклонной дальности до объекта локации и высоты его полета над поверхностью моря.
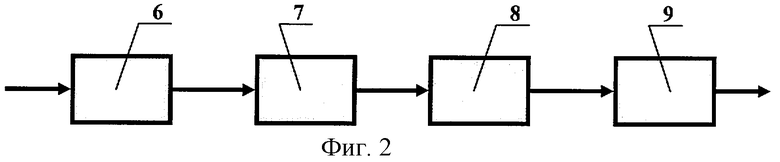
На фиг.2 укрупненно изображена последовательность осуществления операций в заявляемом способе локации.
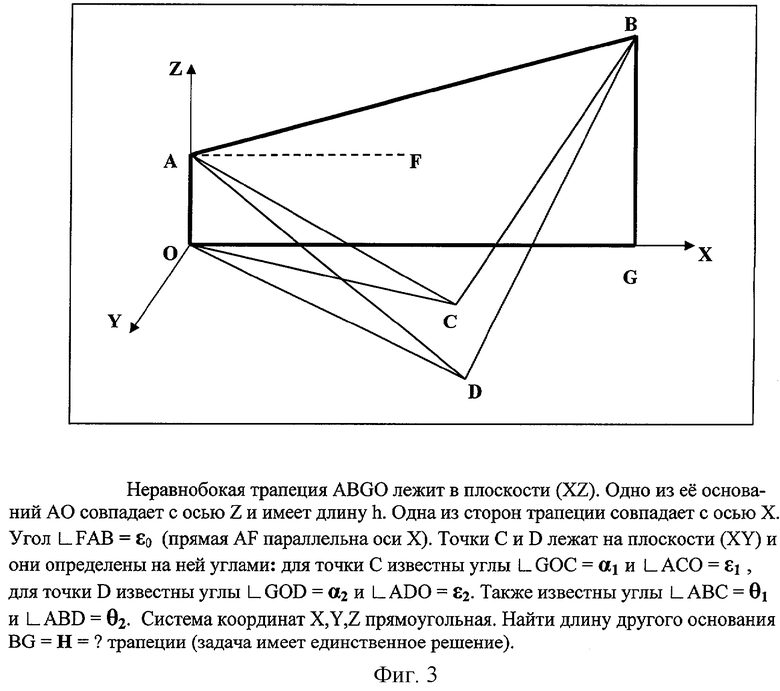
На фиг.3 представлена геометрическая интерпретация задачи измерения координат местоположения объекта локации (точка В) при случайном распределении точек вторичного переотражения С и D от бликов морской поверхности.
Рассмотрим операционную сущность заявляемого способа и ее последовательность.
Известно, что при движении отражателя со скоростью V в направлении излучения лазерного локатора с частотой ν0 (такая скорость называется радиальной) в прямом отраженном от объекта излучении возникает приращение частоты - доплеровский сдвиг - Δν0=ν0(1+2V/с)-ν0=2ν0V/с, где с - скорость света. По величине этого сдвига Δν0 определяют радиальную скорость V объекта, что тривиально. Если падающее на объект излучение переотражается от него под некоторым углом θ относительно линии указанного направления облучения объекта от локатора, то частота доплеровского сдвига выражается по формуле Δν(θ)=Δν0cosθ в предположении, что объект не является релятивистским, то есть 2V/С≪1, что всегда выполняется применительно к локации. Поскольку лоцируемый объект рассматривается как дифракционно ограниченный, можно считать, что переотраженное им излучение является квазисферическим в силу принципа Гюйгенса, то есть происходит по всем направлениям, не затененным самим телом объекта. Реально головная часть ракеты имеет форму, создающую переотражения, в частности, в направлениях к морской поверхности даже более сильные, чем переотражение в направлении непосредственно к локатору (особенно если ракета летит прямо на локатор). В зависимости от того, под каким углом θ компонента переотраженного от движущегося объекта излучения освещает тот или иной морской блик, создающий зеркальное (то есть сильное) отражение в сторону локатора, в принятом от таких бликов сигналах доплеровские сдвиги частоты будут различаться между собой и доплеровским сдвигом (наибольшим по величине) для прямого отражения от объекта Δν0. Это и позволяет по известной геометрии приходящих на фотоприемную матрицу излучений от объекта и от серии морских бликов расчетным путем определить интересующие параметры объекта - его радиальную скорость, наклонную дальность и высоту полета над уровнем моря. Угловые координаты объекта при его обнаружении определяются по данным угловых датчиков сканирующей системы, привязанной к заданному местоположению локатора, а также по номеру канала фотоприемной матрицы, в котором фиксируется сигнал от прямого переотражения излучения от объекта.
Сканирующая по угловым координатам система локатора, работающая в автоматическом режиме подстройки при захвате обнаруженного объекта, всегда приводит прием в ФПУ прямого переотраженного от объекта излучения на центральный канал фотоприемной матрицы ФПУ, условно принимаемый за нулевой. По отношению к этому нулевому номеру центрального канала фотоприемной матрицы, размещенной в плоскости изображений приемного объектива локатора, появление сигналов от бликовых переотражений в других ячейках фотоприемной матрицы с известными номерами позволяет определить (по разности номеров ячеек по отношению к центральной ячейке) угловое направление на данный морской блик по отношению к направлению непосредственно на объект. При этом возникает неопределенность в определении положения данного морского блика, связанная с априорным отсутствием сведений о наклонной дальности до объекта (и высоте его полета над поверхностью моря, что однозначно связано с величиной наклонной дальности до объекта). Раскрытие этой неопределенности достигается на основе совместного решения системы трех (как минимум) независимых уравнений, одно из которых связано с прямым переизлучением, а два (или более) других - с бликовыми переотражениями.
Обратимся к рассмотрению фиг.1, на которой локатор 1 с заведомо известным местоположением в заданной системе координат обнаруживает в режиме сканирования движущийся объект 2, захватывает его в режиме автосопровождения по угловым координатам и измеряет радиальную скорость V объекта по величине доплеровского сдвига частоты Δν0. При этом считаются известными угловые координаты на объект по отношению к реперной точке локатора 1, координаты которой (в частности, ее высота h0 над уровнем моря) известны - X0, Y0 и Z0=h0. Полагаем, что линия направления прямого переизлучения 3 от объекта проходит через данную реперную точку. Указанная линия 3 имеет известные угловые координаты - азимут α0(t) и угол места ε0(t), величины которых во времени t могут непрерывно изменяться за счет движения объекта, но всегда остаются известными функциями времени. Поэтому для определения текущих координат объекта X(t), Y(t) и Z(t) необходимо лишь определять текущую наклонную дальность D(t) до объекта 2 вдоль линии 3, и тогда по известным правилам координаты объекта могут быть легко вычислены (при этом считаем для простоты локатор неподвижным в заданной системе координат)
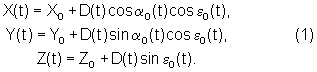
В случае, если движение объекта происходит не точно в направлении линии 3 к локатору, а под каким-то произвольным углом, то вычисление истинной скорости объекта V*(t) может быть найдено по правилам сложения взаимно ортогональных векторов, модули которых - производные соответствующих координат

причем очевидно, что радиальная скорость V как вектор, совпадающий с линией 3, вдоль которой изменяется наклонная дальность D(t), также является, вообще говоря, функцией времени V=V(t) и выражается простой формулой:

Отметим, что скорости - истинная V*(t) и радиальная V(t) в общем случае неодинаковы по величине и различны по направлению, |V*(t)|≥|V(t)|. Изменение величины радиальной скорости происходит как результат маневрирования объекта в пространстве, при этом также меняется величина доплеровского сдвига частоты Δν0=Δν0(t). Знание истинной скорости движения объекта V*(t) необходимо для проведения идентификационного анализа типа этого объекта, поскольку истинная скорость объекта является его важным признаком. Если выражение (2) решить с учетом системы уравнений (1), то окажется, что истинная скорость объекта является функцией не только известной радиальной скорости, азимута и угла места на объект, но и неизвестной наклонной дальности до него, то есть V*(t)=F[Δν0(t), α0(t), ε0(t), D(t)], что означает невозможность определения истинной скорости объекта без измерения наклонной дальности до него. Из этого следует, что на этапе обнаружения объекта и измерения его радиальной скорости (без измерения текущей наклонной дальности) могут быть допущены ошибки в распознавании типа объекта и приняты неверные решения на предмет его дальнейшего автосопровождения по угловым координатам по критерию существенного различия измеренной радиальной скорости и истинной (пока неизвестной) скорости интересующего нас объекта. Поэтому задача одновременного измерения наклонной дальности D(t) является весьма актуальной уже на ранних стадиях обнаружения объекта.
Эта задача поставлена и разрешена в заявляемом техническом решении.
Рассмотрим вопрос измерения наклонной дальности D(t), величина которой на фиг.1 представлена отрезком АВ (где точка А - есть реперная точка локатора, а точка В - есть точка переотражения объекта, представляющегося для оптической локационной системы как дифракционно ограниченного). Высота реперной точки с координатами Х0, Y0, Z0 равна h0=Z0. Пусть, для простоты рассуждений, будем полагать, что морские блики в точках С и D, подсвечиваемые вторичным излучением от объекта 2 вдоль прямых ВС и BD соответственно лежат в одной плоскости (плоскости чертежа) с линией АВ прямого переотражения от объекта, то есть азимуты для всех трех переотражений от объекта - одного прямого и двух бликовых - одинаковы, что позволяет их в данном упрощенном варианте геометрического построения не рассматривать. Все три приходящих к локатору 1 направления переизлучения вдоль прямых ВА, DA и СА (непосредственно от объекта и от бликов в точках D и С морской поверхности) определены соответствующими углами места ε0(t) - для прямого отражения от объекта 2, ε1(t) - для переотражения от блика в точке С вдоль прямой СА и ε2(t) - для переотражения от блика в точке D вдоль прямой DA. Поскольку высота реперной точки АО=h0 известна, то находятся расстояния ОС и OD (дальности до бликовых точек морской поверхности С и D от проекции реперной точки локатора А на линию поверхности моря). Поскольку отсчет углов места ведется от линии горизонта, проходящей через реперную точку А, то нетрудно понять, что указанные расстояния находятся из простых выражений

Однако пока остается неизвестным местоположение объекта 2, поэтому неясно, под какими углами на бликовые точки С и D приходит вторичное излучение от объекта, поскольку угловая ориентация бликовых поверхностей априори неизвестна. Существует бесчисленное множество комбинаций при известном угле места ε0(t) (то есть для определенно известного направления видения объекта локатором) для положения точки В на прямой АВ, в которой могут пересекаться прямые СВ (позиция 4) и DB (позиция 5 на фиг.1) при вариации высоты H(t) объекта над морской поверхностью (линией OG), которая пока не определена, но явно связана с величиной наклонной дальности соотношением

Из геометрических построений на фиг.1 видно, что высота объекта H(t) над уровнем моря может быть иначе выражена из прямоугольных треугольников ΔBCG и ΔBDG (в которых угол OGB - прямой) через углы соответственно между прямыми АВ и ВС - для ΔBCG и прямыми АВ и BD для ΔBDG. Обозначив углы ⊾ABC=θ1 и ⊾ABD=θ2, зная, что угол ⊾ABG=π/2-ε0(t) по определению, легко находим углы при вершинах указанных прямоугольных треугольников, в частности, угол при вершине треугольника ΔBCG равен ⊾CBG=⊾ABG-⊾ABC=π/2-ε0(t)-θ1, а угол при вершине ΔBDG равен ⊾DBG=⊾ABG-⊾ABD=π/2-ε0(t)-θ2. При этом высота H(t)=BG вычисляется как

В выражении (6) отрезок CG можно выразить через известную величину отрезка CD=OD-ОС=h0[ctgε2(t)-ctgε1(t)]. Тогда выражение (6) можно записать в виде

из которого можно выразить неизвестный отрезок DG через известные и измеряемые величины как

Подставляя (8) в (7), получим выражение для высоты объекта в форме

Согласно (9) для вычисления высоты H(t) следует измерить все три угла места с помощью угломестных определителей для соответствующих трех ячеек матрицы ФПУ и датчика угла места системы сканирования по угловым координатам, а также определить два априори неизвестных угла θ1 и θ2. Эти неизвестные углы находятся из измеренных доплеровских смещений частоты, пользуясь общим выражением для доплеровского смещения частоты в зависимости от угла переотражения от движущегося объекта относительно направления прямого переотражения:

откуда легко находим искомые углы по измеренным в соответствующих каналах тракта обработки информации значениям доплеровских сдвигов частоты Δν(θ1) и Δν(θ2)

Подставляя в (9) вычисленные значения углов из (11), получим искомую величину высоты объекта H(t) над поверхностью моря, а затем и значение наклонной дальности D(t), воспользовавшись выражением (5) и с учетом равенства Δν0=2ν0 (V/с), значение которого вычисляется в центральном канале ФПУ по результатам прямого переотражения излучения от объекта. Подставляя полученное значение для D(t) в систему уравнений (1), находим текущие координаты объекта X(t), Y(t) И Z(t), а вычисляя соответствующие производные от текущих координат, находим истинную скорость движения V*(t) объекта согласно выражению (2). В силу громоздкости вычислений конечных величин координат и истинной скорости объекта мы их опускаем в данном описании, но эти вычисления легко осуществляются с помощью спецпроцессора, имеющегося в локационном устройстве.
Нетрудно видеть, что полное решение локационной задачи местоопределения движущегося объекта и его истинной скорости (важнейшего признака его типа) достигается измерением азимутов и углов места, как минимум, по трем направлениям переизлучения - прямому и двум бликовым, а также измерением трех доплеровских сдвигов частоты по этим же направлениям. Такое решение задачи получено, как выше описано, когда все три направления лежат в одной плоскости, то есть дают отклик в ячейках матрицы ФПУ, расположенных в одном и том же столбце. При этом матрица может быть вырожденной - состоять из одного столбца фоточувствительных ячеек, а само излучение в передающем лазерном канале иметь «веерообразную» форму диаграммы излучения - узкую по азимуту и широкую по углу места. Однако при этом снижается вероятность одновременной организации двух действующих бликовых каналов по сравнению со случаем использования матрицы ФПУ с несколькими столбцами, когда должны будут учитываться в аналогичном приведенному расчете азимутальные составляющие α0(t), α1(t) и α2(t), что дополнительно усложнит алгоритм расчетных операций. На фиг.3 такая задача с произвольной ориентацией морских бликов, не расположенных на одной прямой, совпадающей с проекцией линии АВ между реперной точкой локатора и объектом на плоскость, определяющую морскую поверхность (точки С и D не лежат на прямой OG). На этом рисунке корректно поставлена задача нахождения высоты объекта Н над морской поверхностью по измеренным величинам азимутов и углов места на действующие морские блики, и соответствующие этим бликам доплеровские сдвиги частоты излучений, отвечающие углам переотражения зондирующего излучения от объекта в направлении данных бликов по отношению к направлению прямого отражения (по линии ВА). Из рассмотрения фиг.3 следует, что решение задачи возможно и однозначно, однако более громоздко по сравнению с рассмотренным выше, поскольку требует учета азимутальных составляющих на действующие морские блики (в точках С и D, не лежащих на прямой OG). Решение задачи сводится к переносу точек С и D на прямую OG в соответствующие точки С* и D* с сохранением расстояний до них от точки О так, что ОС=ОС* и OD=OD* с соответствующим преобразованием углов ⊾ABC и ⊾ABD к тем же по наименованию углам на фиг.1 (θ1 и θ2), после чего возникает уже разрешенная выше задача. В силу громоздкости вычислений мы их опускаем в данной заявке, и они должны быть проведены при разработке соответствующего спецпроцессора локатора на этапе НИОКР.
На фиг.2 представлена последовательность совершения операций при реализации заявляемого способа локации. Эти операции проводят в следующей последовательности:
- дополнительно подвергают одновременному когерентному приему отраженные от нескольких бликов морской поверхности излучения, поступающие на фотоприемную матрицу с разных произвольно распределенных угловых направлений (позиция 6 на фиг.2),
- определяют в соответствующих каналах, связанных с матричным фотоприемным устройством, доплеровские сдвиги частоты в принятых излучениях для переотраженных от бликов морской поверхности сигналов и соответствующие им угловые координаты на эти морские блики (позиция 7 на фиг.2),
- вычисляют текущие координаты местоположения объекта и его истинную скорость (позиция 8 на фиг.2),
- статистически усредняют полученные результаты вычислений всей совокупности совместных измерений указанных параметров (позиция 9 на фиг.2).
Блики морской поверхности существуют на море практически всегда - как в бурю и шторм, так и в штиль. Размеры переотражающих бликов могут существенно различаться, но все они являются дифракционно ограниченными (точечными) источниками вторичных излучений. При когерентном приеме согласно теореме Цернике-Ван-Циттера [19] радиус когерентности rког, характеризующий размер объекта d и дальность L до него связаны выражением rког≈λL/d, где λ - длина волны лазерного излучения (λ=с/ν0), поэтому при вынужденном уменьшении L при условии, что площадка ячейки ФПУ σ удовлетворяет неравенству σ≫π(λF/Dоб)2/2, возникает опасность приема излучения от объекта и бликов, которые рассматриваются как протяженные, а не точечные, если на апертуре приемного объектива размещается одновременно или последовательно в течение времени интеграрования сигнала в тракте обработки несколько зон когерентности (их число равно (Dоб/2rког)2). Это указывает на целесообразность выполнения ячеек фотоприемной матрицы малых размеров. Это же обстоятельство следует учитывать при оценке разрешающей способности локатора по угловым координатам Δγ≈σ1/2/F (здесь Dоб - диаметр приемного объектива, F - его фокусное расстояние, а ячейка ФПУ полагается имеющей форму квадрата с пренебрежимо малыми зазорами между смежными ячейками).
Увеличение обнаружительной способности лазерного когерентного локатора достигается снижением величины спектральной мощности шума Gш за счет выбора типа ФПУ и режима охлаждения фоточувствительной площадки-матрицы. Важным является учет эффективности фотосмешения, в частности, ослабление влияния шума оптического гетеродина. Автором проведен достаточно сложный физико-математический анализ [20] оптимизации отношения сигнал/шум при когерентном приеме, в результате которого показано, что фоточувствительная площадка-матрица должна устанавливаться не в плоскости расположения диска Эйри, а на некотором расстоянии он нее Δz≈1,952λ(F/Dоб)2 с достаточно высокой точностью. Так, для излучений СО2-лазеров (λ=10,6 мкм) при применении объектива с Dоб=200 мм, F=286 мм это смещение составляет величину всего Δz=42,3 мкм, и при этом точность установки должна быть не хуже 10 мкм. Это позволяет увеличить чувствительность ФПУ приблизительно на 50%.
Можно показать, что при обнаружении объекта в угломестной зоне Δε при круговом обзоре с разрешающей способностью Δγ в когерентных локаторах с многоканальной обработкой в согласованных фильтрах на основе дисперсионных линий задержки (ДЛЗ) с полосой пропускания ΔFлз и базой В=ΔFлзτлз, где τлз - длительность импульсной характеристики ДЛЗ, предельная дальность Lmax обнаружения и измерения параметров объекта (координат и истинной скорости) по рассмотренному алгоритму находится из решения трансцендентного уравнения

где η - экстинкция среды, Р - мощность излучающего лазера непрерывного действия, k - пропускание в передающем и приемном трактах локатора, у - эффективность фотосмешения (у≤1), S - эффективная поверхность отражения объекта (ЭПО), μ - отношение сигнал/шум по напряжению на входе решающего устройства в многоканальном тракте обработки, Т0 - период кругового обзора, ΔFдоп - полоса неопределенности по доплеровскому сдвигу частоты в канале обработки на ДЛЗ. При оценке радиуса когерентности rког можно полагать размер объекта d≈(ЭПО)1/2. Величина ΔFдоп=2|ΔV|/λ, где ΔV - разница между максимальной и минимальной скоростями объекта. Отношение μ сигнал/шум вычисляется по заданным вероятностным характеристикам обнаружения и ложных тревог. Отметим, что выражение (12) относится к локаторам с различными типами диаграмм излучения, в частности к «веерообразному», при использовании одностолбцовой фоточувствительной матрицы (как наиболее простой по конструкции).
Следует особо указать, что в центральном канале ФПУ, связанном с приемом прямого отраженного от объекта сигнала, последний является квазинепрерывным, что существенно отличает его от сигналов от бликов морской поверхности, которые имеют вид относительно коротких импульсных сигналов с учетом динамики перемещения объекта в пространстве. Поэтому обработка бликовых сигналов ведется в соответствующих каналах, конструктивно отличающихся от канала квазинепрерывного сигнала.
Число каналов обработки может быть равно числу ячеек ФПУ. Такая схема допустима на этапе макетной проработки с малым числом ячеек ФПУ или ФПУ с ячейками в виде одного столбца. При использовании матриц ФПУ с большим числом ячеек, что выгодно как с точки зрения снижения величины Δγ, то есть увеличения точности производимых измерений, так и с точки зрения повышения числа одновременно действующих бликовых переотражений для повышения вероятности правильной оценки измеряемых параметров объекта при их статистическом усреднении на последнем операционном этапе реализации заявляемого способа, такая схема становится весьма громоздкой и малонадежной в смысле величины опасности отказов, так как при этом резко возрастает объем аппаратуры с использованием неинтегрированных компонентов, в частности, ДЛЗ. Поэтому в тракте обработки можно предусмотреть возможность оперативного переключения задействованных излучением ячеек ФПУ на сравнительно ограниченное число каналов согласованной фильтрации, число которых соизмеримо с наибольшим возможным числом одновременно действующих морских бликов, что опытно устанавливается.
Как известно, отношение сигнал/шум μ однозначно определяет обнаружительные вероятностные характеристики локатора [21, 22]. Так, вероятность обнаружения Робн сигнала на фоне нормального (Гауссова) шума в соответствии с критерием Неймана-Пирсона определяется отношением сигнал/шум μ на входе решающего устройства с установленным в нем нормированным порогом αп=Uп/σш, где σш - среднеквадратическое напряжение шума на входе решающего устройства, Uп - пороговое напряжение, вычисляется из выражения

где

- интеграл вероятности, а вероятность ложных тревог Рлт равна

Для обычно задаваемых при расчетах локационных систем величинах вероятностей обнаружения и ложных тревог требуемое отношение сигнал/шум определяется из выражения

где Ф-1(х) - обратный интеграл вероятности.
Если качество ФПУ известно (величина спектральной плотности шума Gш), то на основании (16) можно рассчитать величину потребной энергии сигнала на входе ФПУ, которая достаточна для обработки в согласованном фильтре,

Вместо вероятности ложных тревог часто пользуются значением частоты ложных тревог Fлт, которая определяется выражением

где <fш> - среднеквадратическое значение полосы шума, которое в предположении относительной узкополосности тракта имеет выражение  причем f0 - несущая частота сигнала (или центральная частота тракта), Δf - полоса пропускания приемного тракта, по отношению к которому вычисляется полоса шума, причем из выражения (18) обычно вычисляют величину порогового напряжения Uп, которое равно
причем f0 - несущая частота сигнала (или центральная частота тракта), Δf - полоса пропускания приемного тракта, по отношению к которому вычисляется полоса шума, причем из выражения (18) обычно вычисляют величину порогового напряжения Uп, которое равно

Полученное из (19) значение порогового напряжения подставляют в выражение (13) и находят вероятность обнаружения Робн для полученной величины отношения сигнал/шум на выходе согласованного фильтра μ. В зависимости от поставленных условий либо принимают решение на увеличение времени обзора в заданном телесном угле, либо, наоборот, на уменьшение этого времени или на увеличение предельной дальности обнаружения локатора (либо на увеличение точности измеряемых параметров объекта).
При усреднении результатов однотипных параметров по группе измерений с учетом временного фактора и движения объекта применяют известные статистические методы - определяют математическое ожидание каждой из измеряемых величин как функций времени и дисперсию, то есть уточняют значения измеряемых параметров и определяют погрешности этих измерений. По совокупности измерений за некоторый отрезок времени при автосопровождении объекта по угловым координатам определяют траекторию движения объекта с заданным точностью измерений разбросом, принимают другие решения на предмет дальнейшего взаимодействия с данным объектом либо переходят к обнаружению другого объекта и его автосопровождению по заранее заложенным критериям оценки.
Точность измерения текущих координат объекта из общих соображений будет повышаться с ростом числа обрабатываемых одновременно переотражений от действующих морских бликов и с возможно большим их рассредоточением на морской поверхности. Предельная точность этих измерений определяется угловой разрешающей способностью Δγ фотоприемной матрицы, что указывает на целесообразность разработки ФПУ на КРТ для CO2 одночастотных лазеров с матрицами, содержащими большое число ячеек в столбцах и достаточное количество строк в матрице (для захвата боковых бликов). Развитие технологии уже сегодня позволяет изготавливать, например, ПЗС-матрицы на 2400×1800 ячеек для видимого диапазона волн, используемые в цифровых камерах. Аналогично могут быть созданы и охлаждаемые жидким азотом КРТ-матрицы на диапазон 10,6 мкм. Следует отметить, что точность проводимых измерений повышается при большем рассредоточении бликовых зон (как в триангуляционных дальномерах), причем с учетом того, что рассматриваемые локаторы в основном предназначены для работы по низколетящим объектам (например, низколетящим крылатым ракетам морского базирования), то есть с малыми углами места на объект и блики от его облучения, существенный вклад в снижение погрешностей дают не продольно расположенные блики (по проекции на поверхность моря прямой АВ), а именно боковые блики относительно указанной траектории, поскольку они лучше разрешаются азимутальными угломерными средствами. Именно поэтому целесообразно применять многостолбцовые (с достаточно большим числом строк) матрицы в ФПУ.
Достаточно сложную техническую проблему следует разрешить при создании коммутирующих устройств высокого быстродействия для подключения тех или иных матричных ячеек (их выходных усилителей в интегральном исполнении) к каналам обработки с согласованной фильтрацией сигналов, чтобы исключить необходимость чисто параллельной обработки в радиотракте с числом каналов, равным числу ячеек матрицы ФПУ, что представляется излишне громоздким техническим решением. Это потребует интеграции ячеек матрицы ФПУ с их предварительными усилителями с определителем действующих по принимаемым излучениям ячеек матрицы и коммутатором этих ячеек к нескольким выходам, подключаемым к внешним канальным согласованным фильтрам. Разработку такого интегрированного ФПУ можно провести на предприятиях электронной промышленности с имеющейся технологией изготовления СБИС совместно с разработчиками криогенной техники.
Следует отметить, что при разработке спецпроцессора для вычисления координат и истинной скорости объекта следует предусмотреть возможность учета собственного движения локатора, размещенного на корабле, подводной лодке и даже на вертолете с жесткой топографической привязкой этих носителей к карте местности. Учет собственного движения локатора важен особенно в тех случаях, когда различие в скоростях объекта и локатора не слишком велико. Кроме того, морское базирование локационной системы требует учета такого фактора, как морская качка, для чего должны использоваться высокоточные гирорамы для стабилизации углового положения локатора. Однако эти средства стабилизации не компенсируют перемещения локатора по вертикали, которое обусловлено наличием морского волнения, поэтому в спецпроцессор должны вводиться данные о текущем (изменяющемся во времени) значении высоты h0(t) реперной точки локатора.
Замечание
В приведенном описании указано, что решение задачи местоопределения текущих координат объекта возможно при использовании когерентного приема и обработки излучений одновременно от нескольких морских бликов. Строго говоря, если рассматривать поверхность моря в виде плоскости (XY), как на фиг.3, то однозначное решение возможно и при одной бликовой точке С (или D) с известными ее координатами, так как через известную прямую АВ из известной точки С (или D) можно провести только одну прямую под известным углом θ1 (или θ2), которая пересечет прямую АВ в точке В, положение которой станет также известным. Точка С (или D) определяется однозначно двумя углами - азимутом и углом места относительно известной реперной точки А. Однако использование двух и более морских бликов в расчете координат точки В (объекта) вполне оправдано указанной операцией статистического усреднения: чем больше будет использовано одновременно действующих бликов морской поверхности, тем точнее результат вычислений на стадии их статистического усреднения.
Предлагаемое техническое решение представляет интерес для ВМФ страны. По данному способу локации, не имеющему аналогов в части измерения координат объекта при немодулированном зондирующем излучении, следует провести соответствующую научно-исследовательскую и опытно-конструкторскую разработку на специализированных предприятиях военно-промышленного комплекса с привлечением смежных организаций электронной промышленности с общим сроком около 3 лет с соответствующим финансированием.
Литература
1. Фильтры на поверхностных акустических волнах. / Под ред. Г.Мэттьюза, М., Сов. радио, 1981, 472 с.
2. Тверской В.И. Дисперсионно-временные методы измерения спектров радиосигналов, М., Сов. радио, 1974, 240 с.
3. Джек А.А., Грант П.М., Коллинз Дж.Х. Теория проектирования и применение Фурье-процессоров на поверхностных акустических волнах, ТИИЭИР, 1980, №4, с.22-43.
4. Меньших О.Ф. Формирователь сложных линейно-частотно-модулированных сигналов. Авт. свид. СССР №1302987, 1985.
5. Меньших О.Ф. Способ анализа спектра сигналов. Авт. свид. СССР, №1817554, 1988.
6. Меньших О.Ф. Измеритель частоты сигналов лазерного доплеровского локатора. Авт. свид. СССР №1621728 и авт. свид. СССР №1621729, 1988.
7. Меньших О.Ф. Спектроанализатор лазерного доплеровского локатора. Авт. свид СССР №1595219, 1988.
8. Меньших О.Ф. Лазерный доплеровский локатор. Авт. свид. СССР №1741553, 1990.
9. Меньших О.Ф. Способ обнаружения детерминированного радиосигнала. Авт. свид. СССР №1828280, 1991.
10. Меньших О.Ф. Обнаружитель лазерного доплеровского локатора. Авт. свид. СССР №1805756 и №1829640, 1991.
11. Меньших О.Ф. Устройство для частотной модуляции лазера. Авт. свид. СССР №1373188, 1985.
12. Меньших О.Ф. Устройство для измерения динамических характеристик пьезокорректора лазера. Авт. свид. СССР №1630585, 1988.
13. Меньших О.Ф., Способ измерения базы дисперсионных линий задержки. Авт. свид. СССР №1574036, 1988.
14. Меньших О.Ф. Способ измерения кратковременной стабильности частоты излучения газового лазера. Авт. свид. СССР №1554719, 1987.
15. Меньших О.Ф. Устройство для измерения кратковременной стабильности частоты излучений газовых лазеров. Авт. свид. СССР №1556291, 1988.
16. Меньших О.Ф. Устройство автоподстройки частоты лазерного доплеровского локатора. Авт. свид. СССР №1591675, а также Меньших О.Ф. Устройство для измерения вариации частоты лазерного излучения в системе связанных лазеров. Авт. свид. СССР №1621732, 1988.
17. Меньших О.Ф., Лазерный когерентный локатор, Патент РФ по заявке 1990 г. №4530208/22, решение о выдаче охранного документа принято 18.08.1991.
18. Меньших О.Ф. Обнаружитель моноимпульсного сигнала. Патент РФ №2046370, 1992.
19. Борн М., Вольф Э. Основы оптики. М., Наука, 1970.
20. Отчет о НИР предприятия п/я Р-6681, инв. № М-12749, 1989.
21. Левин Б.Р. Теоретические основы статистической радиотехники. М., Сов. радио, 1974, кн.1 и 2.
22. Тихонов В.И. Оптимальный прием сигналов. М., Радио и связь, 1983, 320 с.
Изобретение относится к области лазерной локации. Техническим результатом изобретения является обеспечение возможности измерения текущих координат и скорости преимущественно низколетящих крылатых ракет доплеровским когерентным локатором с непрерывным немодулированным излучением. Способ локации основан на зондировании дифракционно ограниченного объекта, движущегося над поверхностью моря (океана), немодулированными излучениями одночастотного лазера непрерывного действия и многоканальной когерентной обработке принимаемых излучений матричным фотоприемным устройством с определением доплеровских сдвигов частоты в переотраженном излучении и последующей многоканальной параллельной согласованной фильтрацией выделенных радиосигналов. При этом когерентному приему и обработке дополнительно и одновременно подвергают отраженные от нескольких бликов морской поверхности излучения, поступающие на фотоприемную матрицу с разных произвольно распределенных угловых направлений. Определяют в соответствующих каналах, связанных с матричным фотоприемным устройством, доплеровские сдвиги частоты в принятых излучениях от бликов морской поверхности и соответствующие им угловые координаты на эти блики. Вычисляют текущие координаты местоположения объекта и его истинную скорость, а также статистически усредняют полученные результаты вычислений всей совокупности совместных измерений указанных параметров. 3 ил.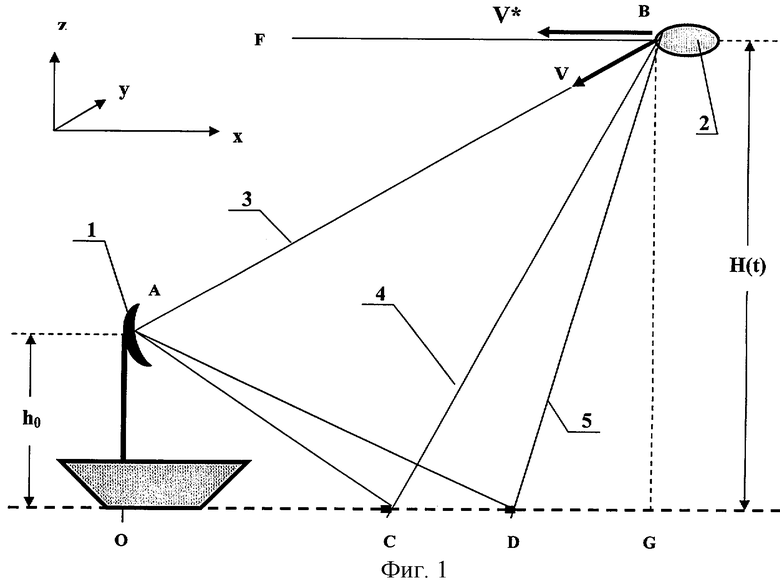
Способ локации, основанный на зондировании дифракционно ограниченного объекта, движущегося над поверхностью моря (океана), немодулированными излучениями одночастотного лазера непрерывного действия и многоканальной когерентной обработке принимаемых излучений матричным фотоприемным устройством с определением доплеровских сдвигов частоты в переотраженном излучении и последующей многоканальной параллельной согласованной фильтрацией выделенных радиосигналов, отличающийся тем, что когерентному приему и обработке дополнительно и одновременно подвергают отраженные от нескольких бликов морской поверхности излучения, поступающие на фотоприемную матрицу с разных произвольно распределенных угловых направлений, определяют в соответствующих каналах, связанных с матричным фотоприемным устройством, доплеровские сдвиги частоты в принятых излучениях от бликов морской поверхности и соответствующие им угловые координаты на эти морские блики, вычисляют текущие координаты местоположения объекта и его истинную скорость, а также статистически усредняют полученные результаты вычислений всей совокупности совместных измерений указанных параметров.
| АДАПТИВНЫЙ ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ЛОКАТОР | 1990 |
|
RU2012013C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2152056C1 |
| Гусеничная цепь | 1985 |
|
SU1318475A1 |
| US 3765768 А, 16.10.1973 | |||
| JP 56143974 А, 10.11.1981. | |||

