ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Данное изобретение относится, в общем, к телекоммуникациям и, более конкретно, к способу для обнаружения и компенсации ошибок времени прибытия в телекоммуникационной системе.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Службы часто вызываются с использованием телефонных номеров, таких как «911». Если звонящий находится в фиксированном местоположении, таком как местожительство, компьютерные системы отслеживают телефонный номер входящего телефонного вызова с использованием автоматического определения номера (ANI) и быстро определяют адрес, от которого происходит вызов. Таким образом, определение местоположения, из которого вызываются службы помощи в чрезвычайных ситуациях, является относительно простой задачей.
Определение местоположения абонента, вызывающего службу помощи в чрезвычайных ситуациях через мобильную связь, такую как сотовые телефоны, устройства систем персональной связи (PCS) и т.п., не осуществляется так легко. Способы радиотриангуляции длительное время использовались для определения местоположения мобильной станции. Однако известно, что такие способы радиотриангуляции являются по существу неточными. Ошибки порядка тысяч метров не являются чем-то необычным. Однако такие ошибки являются недопустимыми для прибытия служб помощи в чрезвычайных ситуациях.
Федеральный комитет по связи (FCC) (США) упорядочил изменения в технологии связи, что обеспечит возможность достижения большей точности в определении местоположения. В случае мобильной связи FCC выработал правило, которое требует, чтобы основанные на инфраструктуре системы определения местоположения имели точность 150 метров 67% времени (и точность 300 метров 95% времени). Для систем, которые требуют модифицированные микротелефонные трубки, FCC вынес постановление о том, что такие системы должны определять местоположение в пределах 50 метров 67% времени (и 150 метров 95% времени).
Существующие технологии определения местоположения, основанные на глобальной системе позиционирования (GPS), используют сеть спутников в небе, которые передают сигналы в известное время. Приемник GPS на земле измеряет время прибытия сигналов от каждого спутника, который он может обнаружить. Время прибытия, вместе с точным местоположением спутников и точным временем, в течение которого сигнал передавался от каждого спутника, используется для триангуляции местоположения приемника GPS. Типичный приемник GPS требует четыре спутника для осуществления триангуляции, и эффективность результирующего вычисления увеличивается с увеличением числа спутников, которые могут быть обнаружены.
В качестве альтернативы GPS существующую сеть сотовых базовых станций можно трактовать как сеть спутников для целей определения местоположения. Подобно технологии GPS, точное местоположение каждой базовой станции, точное время, в которое базовая станция передает сигнал, и время прибытия сигнала базовой станции в мобильную станцию могут использоваться для триангуляции положения мобильной станции. Этот способ описан некоторыми поставщиками услуг как усовершенствованная трилатерация по прямой линии связи (AFLT). Значительной проблемой, стоящей перед мобильной станцией, является измерение времени прибытия сигналами, которые принимаются от каждой базовой станции. Различные беспроводные технологии могут принимать различные подходы к измерениям времени прибытия. Одной из таких технологий является множественный доступ с кодовым разделением каналов (CDMA). Модуляция CDMA является одним из нескольких способов, которые дают возможность большому числу абонентов системы совместно использовать систему связи. Можно использовать стандартные способы модуляции CDMA в качестве части системы AFLT.
Системы радиолокации используют сигналы времени прибытия (TOA), приходящие от различных передатчиков с известным положением, для триангуляции и вычисления местоположения мобильной станции. Однако сигналы TOA часто искажены или ошибочны из-за многолучевой передачи или недоступности линии визирования между сетевой антенной и мобильной станцией. Фиг. 1 иллюстрирует пример многолучевой передачи, которая может испытываться мобильным телефоном в транспортном средстве 10. В примере, проиллюстрированном на фиг.1 мобильная станция 10 принимает сигналы от передатчиков 12 и 14, смонтированных на вершинах мачт. В примере по фиг.1 мобильная станция 10 принимает сигнал непосредственно от передатчиков 12 и 14, но также принимает сигналы от передатчика 14, которые отразились от расположенных поблизости зданий. Таким образом, мобильная станция 10 принимает ряд сигналов от передатчика 14. В примере, показанном на фиг. 1, мобильная станция 10 не находится в пределах линии визирования (LOS) передатчика 16. А именно, здания или другие конструкции блокируют прямую линию визирования между мобильной станцией 10 и передатчиком 16. Однако мобильная станция 10 все же детектирует сигналы от передатчика 16, которые отражаются от зданий или других конструкций или дефрагируют на краях зданий или других конструкций. Кроме того, мобильная станция 10 принимает сигналы от передатчика 16, смонтированного на вершине здания, и может также принимать сигналы от спутника 18 глобальной системы позиционирования (GPS) на орбите вокруг Земли. В результате, мобильная станция 10 принимает множество сигналов от передатчика 16, ни один из которых не является прямым сигналом LOS. Сигналы от спутника 18 GPS могут также включать в себя как сигналы LOS, так и отраженные сигналы.
Как результат таких сигналов многолучевого распространения измерения времени прибытия мобильной станцией подвержены ошибкам. Такие ошибки могут быть значительными при наличии сигналов многолучевого распространения и тем самым делают сложным или невозможным достижение директив FCC относительно точности определения местоположения. Следовательно, следует понимать, что существует значительная необходимость в системе и способе для усовершенствования измерений TOA для систем определения местоположения мобильных станций. Данное изобретение обеспечивает решение данной проблемы и другие преимущества, которые явствуют из следующего подробного описания и сопутствующих чертежей.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
Данное изобретение воплощено в системе и способе для коррекции ошибок вследствие многолучевого распространения в телекоммуникационном устройстве. В примерном варианте осуществления система содержит средство поиска (искатель) для анализа принимаемых сигналов и определения сигнала корреляции в заранее заданных точках во времени. Искатель определяет максимальный уровень сигнала в выбранной одной из упомянутых заранее заданных точек во времени. Средство анализа (анализатор) сигналов генерирует математическую модель заранее заданной функции отклика с использованием максимального уровня сигнала и уровней сигналов корреляции из заранее заданных точек во времени, примыкающих к выбранному времени. Анализатор сигналов использует эту математическую модель для определения действительного максимального уровня и длительности импульса связанных с заранее заданной функцией отклика, и применяет поправочный коэффициент к времени прибытия на основе длительности импульса для того, чтобы сгенерировать скорректированное время прибытия.
В одном варианте осуществления длительность импульса определяется в точке на математической модели, где уровень сигнала корреляции является меньшим, чем действительный максимальный уровень, на заранее заданную величину. В примерном варианте осуществления анализатор сигналов может динамически выбирать эту заранее заданную величину. Анализатор сигналов может выбрать заранее заданную величину на основе отношения сигнал-шум принятого сигнала.
В примерном варианте осуществления уровни сигналов корреляции основаны на уровне принимаемых сигналов. Максимальный уровень сигналов и уровни сигналов корреляции из заранее заданных точек во времени, примыкающих к выбранному времени, могут использоваться для определения коэффициентов в математической модели. В примерном варианте осуществления, коэффициенты в математической модели используются для определения длительности импульса математической модели. В одном варианте осуществления математической моделью является математическая функция второго порядка. В альтернативном варианте осуществления, математической моделью является математическая функция, порядок которой превосходит 2.
ПЕРЕЧЕНЬ ФИГУР
Фиг.1 - иллюстрация приема при многолучевом распространении между источниками передачи и мобильной станцией.
Фиг.2 - функциональная блок-схема системы, реализующей данное изобретение.
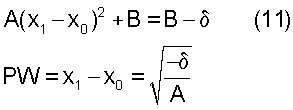
Фиг.3 - график формы волны, иллюстрирующий сигнал корреляции, генерируемый системой по фиг.2 в отсутствие эффектов многолучевого распространения.
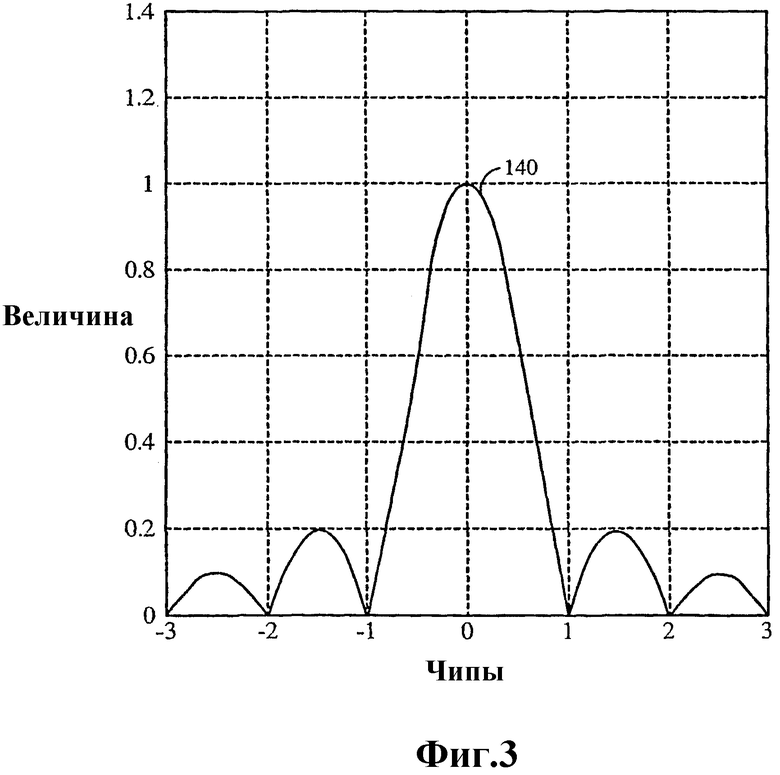
Фиг.4 - график формы волны, иллюстрирующий сигнал корреляции, генерируемый системой по фиг.2 при наличии синфазных сигналов многолучевого распространения.
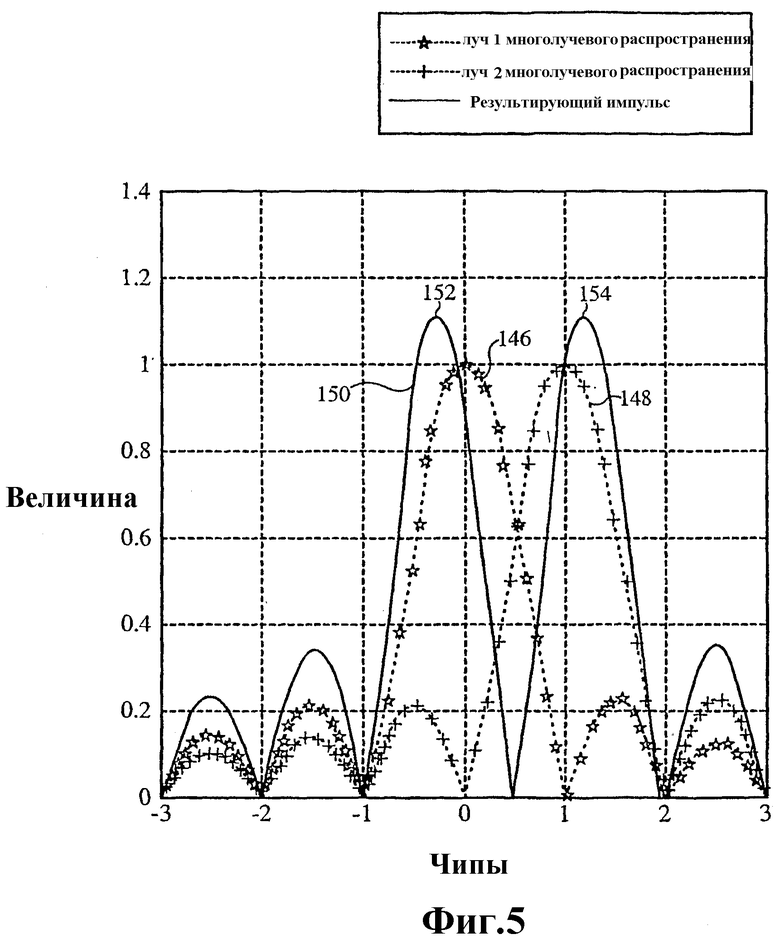
Фиг.5 - график формы волны, иллюстрирующий сигнал корреляции, генерируемый системой по фиг.2 при наличии несинфазных сигналов многолучевого распространения.
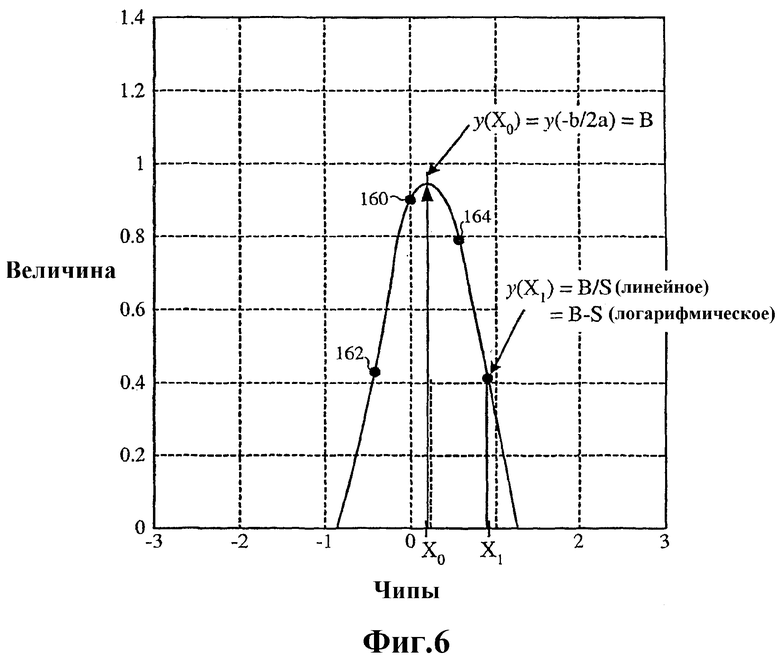
Фиг.6 - форма волны, иллюстрирующая моделирующую функцию, используемую данным изобретением для более точного определения времени прибытия.
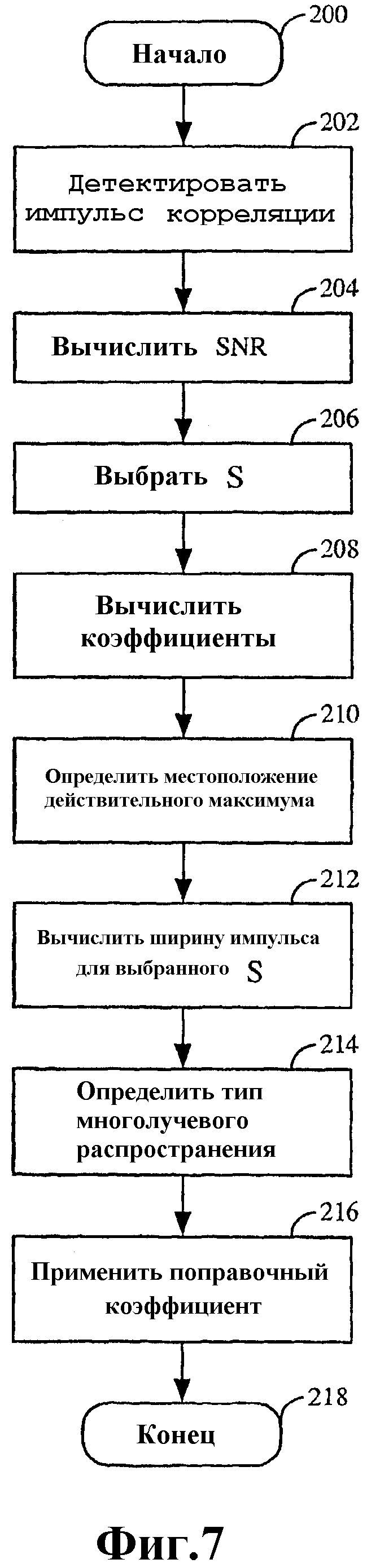
Фиг.7 - блок-схема последовательности операций, иллюстрирующая работу изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Данное изобретение использует способ математического моделирования для более точного определения времени прибытия (TOA) сигнала, переданного от базовой приемо-передающей станции (BTS). Фиг.1 является схемой, иллюстрирующей работу беспроводной системы, использующей усовершенствованную трилатерацию по прямой линии связи (AFLT) для определения местоположения мобильной станции. Как показано на фиг.1, мобильная станция 10 находится в пределах зоны радиопокрытия множества BTS 12-16. Для обеспечения нормальной связи, такой как речевая связь, мобильная станция 10 устанавливает линии связи с BTS 12-16 соответственно. Информация, выводимая в процессе установления линий связи, может использоваться для расчета TOA и тем самым определения местоположения мобильной станции 10 относительно BTS 12-16. Однако сигналы многолучевого распространения приводят к изменению импульса корреляции, обычно генерируемого в пределах мобильной станции 10, и приводят к возможным ошибкам в вычислении точного TOA. Измерение TOA при наличии сигналов многолучевого распространения не является достаточно точным для определения точного местоположения мобильной станции 10. Данное изобретение выводит более точную информацию TOA, которая корректирует или компенсирует сигналы многолучевого распространения и дает возможность более точно определить местоположение мобильной станции 10.
Данное изобретение воплощено в системе 100, показанной в функциональной блок-схеме по фиг. 2. Система 100 включает в себя центральный процессор (CPU) 102, который управляет работой данной системы. Специалистам в данной области техники должно быть понятно, что подразумевается, что CPU 102 охватывает любые устройства обработки данных, выполненные с возможностью управления телекоммуникационной системой. Эти устройства включают в себя микропроцессоры, встроенные контроллеры, специализированные интегральные микросхемы (ASIC), цифровые сигнальные процессоры (DSP), конечные автоматы, специализированное дискретное аппаратное обеспечение и т.п. Данное изобретение не ограничено специфическим компонентом аппаратного обеспечения, выбранным для реализации CPU 102.
Система также предпочтительно включает в себя память 104, которая может включать в себя как постоянное запоминающее устройство (ПЗУ, ROM), так и запоминающее устройство с произвольной выборкой (ОЗУ, RAM). Память 104 обеспечивает команды и данные для CPU 102. Часть памяти 104 может также включать в себя энергонезависимое ОЗУ (NVRAM).
Система 100, которая обычно воплощена в устройстве беспроводной связи, таком как сотовый телефон, также включает в себя корпус 106, который содержит передатчик 108 и приемник 110 для того, чтобы дать возможность осуществлять передачу и прием данных, например звуковую связь, между системой 100 и удаленным местоположением, таким как BTS (например, BTS 12 по фиг. 1). Передатчик 108 и приемник 110 могут быть объединены в приемопередатчик 112. Антенна 114 прикреплена к корпусу 106 и электрически подключена к приемопередатчику 112. Работа передатчика 108, приемника 110 и антенны 114 широко известна в данной области техники и не нуждается в описании здесь, за исключением того, что специфически относится к данному изобретению.
В реализации для устройства CDMA система также включает в себя средство поиска (искатель) 116 для обнаружения и определения уровня сигналов, принятых приемником 110. Искатель 116 детектирует один или несколько параметров, таких как общая энергия, энергия пилот-сигнала на элемент данных (символ) псевдошумовой (PN) последовательности (чип), спектральная плотность мощности и другие параметры, известные в данной области техники. Как будет описано более подробно, искатель 116 осуществляет корреляционный анализ для определения времени прибытия (TOA) от местоположения, такого как BTS 12 (см. фиг. 1).
Искатель 116 осуществляет корреляционный анализ между опорным сигналом и принятым сигналом и генерирует выходной сигнал корреляции. Средство анализа (анализатор) сигналов или моделирующий процессор 120 анализирует сигналы корреляции и использует математическую модель 122 для генерации точных данных TOA, которые компенсируют или корректируют эффекты многолучевого распространения.
Система 100 включает в себя таймер 124 для обеспечения синхронизации системы, которая используется для измерения времен задержек в прибытии сигналов от различных источников (например, BTS 12-16 и спутника 18). Таймер 124 может быть автономным устройством или частью CPU 102.
Различные компоненты системы 100 связаны вместе системой шин 126, которая может включать в себя силовую шину, шину управляющих сигналов и шину сигналов состояния в дополнение к шине данных. Однако в целях ясности, различные шины показаны на фиг. 2 как система шин 126.
Специалисту в данной области техники будет ясно, что система 100, показанная на фиг. 2, является функциональной блок-схемой, а не перечислением специфических компонентов. Например, хотя искатель 116 и анализатор 120 сигналов показаны как два отдельных блока в системе 100, фактически они могут быть воплощены в одном физическом компоненте, таком как цифровой сигнальный процессор (DSP). Они могут также находиться как коды программ в памяти 104, причем такой код обрабатывается CPU 102. Такие же соображения могут применяться к другим компонентам, перечисленным в системе 100 по фиг.2, таким как таймер 124.
Когда BTS обнаружена, на выходе искателя 116 выдается импульс, который может рассматриваться как импульс корреляции. Этот импульс корреляции может использоваться для измерения времени прибытия сигнала от BTS. Однако точность таких измерений времени прибытия сильно ограничивает точность определения положения.
Работа компонентов, показанных в системе 100 по фиг.2, будет объяснена со ссылкой на фиг.3-5. Фиг.3 является графиком формы волны, выделенной диаграммой, иллюстрирующей величину типичного импульса корреляции, генерируемого искателем 116 в отсутствие каких-либо эффектов многолучевого распространения. Для помощи в правильном понимании данного изобретения будет представлено краткое описание обработки TOA с использованием, в качестве примера мобильной станции CDMA. Мобильной станции (например, мобильной станции 10 на фиг. 1), реализующей систему 100 по фиг. 2, первоначально назначается псевдошумовой (PN) код. PN код может храниться в памяти 104 в качестве локального эталона. Когда базовая станция (например, BTS 12) передает данные к мобильной станции 10, базовая станция передает PN код. Система 100 непрерывно ищет корреляцию между локальным эталоном (т.е. хранимым PN кодом) и передаваемыми данными (т.е. передаваемым PN кодом).
Как широко известно в данной области техники, все передатчики (например, BTS 12-16) передают один и тот же PN код, но начало передачи PN кода от передатчика в каждой BTS задерживается во времени на точно известное смещение. Эти временные смещения измеряются в числах, кратных 64 чипам. Как ясно специалистам в данной области техники, «чип» является единичным блоком данных в PN последовательности. Поскольку данные передаются с известной скоростью, чипы могут использоваться как мера времени. Хотя данное описание может быть охарактеризовано в действительных единицах времени, более удобно ссылаться на время, измеряемое в чипах и частях чипов, так как система 100 осуществляет соответствующий ей анализ и измерения в единицах измерения, соответствующих чипам.
PN смещения избирательно назначаются передатчикам таким образом, что смещения в некоторой географической области разнесены настолько, насколько это возможно для того, чтобы избежать взаимных помех между передатчиками. Передатчики (например, передатчики в BTS 12-16) могут быть идентифицированы посредством передаваемых идентификационных данных, но иногда помечаются их временем PN смещения. Например, передатчик в BTS 12 может быть идентифицирован как PN 320 для указания того, что он передает PN код при смещении 320 чипов. В данном примере передатчики 14 и 16 могут быть идентифицированы как PN 448 и PN 640 соответственно для указания времен смещения, в которые каждый будет передавать PN код.
Следует понимать, однако, что независимо от того, как помечены передатчики, относительное смещение каждого по отношению друг к другу может быть установлено из информации, кодированной в сигналах. Приемник 110 (см. фиг. 2) в мобильной станции 10 будет обнаруживать PN от каждого из передатчиков в географической области (например, передатчиков в BTS 12-16).
Когда PN код передается от BTS (например, BTS 12), может быть задержка из-за PN смещения, назначенного к каждому передатчику. Кроме того, существует задержка на распространение сигнала, которая служит показателем расстояния между передатчиком и мобильной станцией 10. Именно эта задержка на распространение может быть измерена системой 100 для определения местоположения мобильной станции. Например, импульс корреляции от BTS с самым малым PN смещением прибудет на мобильную станцию 10 прежде прибытия сигналов от каких-либо других BTS. Система 100 должна точно определить TOA этого первого сигнала и может произвольно поставить его в соответствие нулевому временному смещению. Последующие импульсы корреляции от других BTS и/или спутников (например, спутника 18) будут также обнаружены мобильной станцией 10, но с дополнительными задержками, которые являются результатом PN смещения и задержки на распространение. Задержка, связанная с PN смещением, является точно известной. Таким образом, остаточной задержкой является задержка на распространение как результат расстояния между BTS и мобильной станцией 10 плюс коэффициент ошибки, обусловленный отсутствием линии визирования между антенной сети и мобильной станцией.
Как ясно специалисту в данной области техники, небольшая ошибка в измерении корректного TOA приведет к значительным ошибкам в процессе определения местоположения. А именно, небольшие ошибки в TOA, которые могут быть обусловлены эффектами многолучевого распространения, приведут к ошибкам в вычислении AFLT. Система 100 обеспечивает способ для компенсации эффектов многолучевого распространения и, таким образом, обеспечения более точного TOA. Фактический процесс определения местоположения мобильной станции 10 с использованием триангуляции, основанной на задержке TOA, известен в данной области техники и не нуждается в более подробном описании здесь. Однако следует понимать ясно, что на любое измерение, основанное на TOA, будут оказывать воздействие ошибки в TOA. Эффекты многолучевого распространения обеспечивают один значительный источник таких ошибок. Система 100 уменьшает эффекты ошибок вследствие многолучевого распространения и, таким образом, обеспечивает более точное определение TOA.
Искатель 116 сдвигает хранимый эталон до тех пор, пока не будет обнаружена корреляция между хранимым эталоном и передаваемыми данными. Степень сдвига хранимого эталона выбирается для оптимизации скорости сбора данных и обеспечения достаточной синхронизации между беспроводным устройством 10 и конкретной BTS (например, BTS 12 по фиг. 1). Это показано в форме волны по фиг. 3. В примере, показанном на фиг. 3, не присутствуют никакие эффекты многолучевого распространения, и форма волны корреляции 140 имеет максимальное значение при чипе 0.
Ряд различных показателей, таких как общая энергия, энергия пилот-сигнала на PN чип или спектральная плотность мощности, могут использоваться в качестве величины корреляции. Одним из общеизвестных показателей является просто принимаемый уровень сигнала, такой, который может быть указан индексом уровня принимаемого сигнала (RSSI). Специалистам в данной области техники будет ясно, что искатель 116 (см. фиг. 1) формирует числовые значения, связанные с корреляцией между хранимым PN кодом и передаваемым PN кодом. Форма волны 140 является результатом нанесения на график значений корреляции от искателя при различных значениях чипов.
Форма волны по фиг. 3 показывает иллюстративный выходной сигнал корреляции, генерируемый искателем 116 (см. фиг. 2) при единственной BTS (например, BTS 12) в отсутствие каких-либо сигналов многолучевого распространения. Искатель 116 сдвигает эталонные данные (т.е. хранимый PN код) на одну вторую чипа каждый раз, когда он детектирует корреляцию между эталонными данными и принимаемыми данными.
Данные, передаваемые от передатчика 12, также включают в себя данные идентификации таким образом, что мобильная станция 10, реализующая систему 100, может идентифицировать передатчик 12 как источник обнаруженного сигнала корреляции. В дополнение к передатчику 12 мобильная станция 10, реализующая систему 100, будет принимать данные от передатчиков 14-16.
Кроме того, мобильная станция 10, реализующая систему 100, может детектировать импульсы от дополнительных передатчиков (не показаны) базовых станций или от спутников, использующих сигналы глобальной системы позиционирования (GPS) (например, от спутника 18). Как известно в данной области техники, GPS также использует данные о времени прибытия для того, чтобы определить местоположение мобильной станции 10. В примерном варианте осуществления мобильная станция 10 определяет данные о времени прибытия от четырех или более различных передатчиков. В отсутствие каких-либо эффектов многолучевого распространения импульс показанный в форме волны по фиг. 3, обеспечивает относительно точное измерение времени прибытия и, таким образом, может быть использован в сочетании с импульсами корреляции от других BTS или спутников для точного определения местоположения мобильной станции 10.
К несчастью, эффекты многолучевого распространения присутствуют почти во всех измерениях TOA. Хотя для сигналов спутников, использующих технологию определения местоположения GPS, эффекты многолучевого распространения характерны в меньшей степени, эти эффекты все же присутствуют. Эффекты многолучевого распространения от спутников GPS (например, спутника 18 GPS), в частности, преобладают в городских участках, где здания и другие созданные человеком конструкции создают помехи сигналу GPS. Наземные системы, такие как передатчики 12-16 (см. фиг.1), также подвергаются влиянию созданных человеком конструкций таким образом, что сигналы дефрагируются и/или отражаются. В результате, мобильная станция 10 принимает через короткие промежутки множество реплик одного и того же сигнала. Система 100 выполнена с возможностью вычисления ошибки, возникающей от таких эффектов многолучевого распространения. Эти эффекты многолучевого распространения могут быть названы «короткими эффектами многолучевого распространения», так как множественные сигналы в общем задержаны только на малую величину времени и могут прибывать в антенну 114 (см. фиг. 2) системы 100 таким образом, что соответствующие времена прибытия слишком близки, чтобы сформировать различные максимумы в общей корреляционной функции. А именно, сигналы приходят в пределах такого короткого периода времени, что выходной сигнал из искателя 116 является искаженным импульсом, который является результатом эффектов наложения множества детектированных сигналов.
В предыдущем примере, обсуждаемом по отношению к форме волны по фиг.3, мобильная станция 10 принимает единственный сигнал от передатчика 12 без сигналов многолучевого распространения. Эффект множества сигналов показан в форме волны по фиг.4, где искатель 116 показывает величину корреляции, возникающую от двух сигналов 142 и 144, которые являются синфазными и прибывают на мобильную станцию 10 в пределах одного чипа по отношению друг к другу. Аддитивные эффекты двух синфазных сигналов показаны в форме волны 146, которая имеет единственный максимум с более высокой, чем нормальная, величиной и с гораздо более широкой длительностью импульса, что является результатом множества приемов одного и того же сигнала в пределах короткого периода времени. Вместо относительно узкого импульса при 0,0 чипов, как показано в форме волны фиг.3, искатель 116 генерирует широкий импульс, который центрирован приблизительно в 0,5 чипа. Эта ошибка делает сложным точное определение ТОА, так как системы сконструированы для детектирования максимального сигнала. Таким образом, эффекты многолучевого распространения вызывают расширение импульса корреляции с результирующей ошибкой в истинном ТОА.
Форма волны по фиг.5 иллюстрирует выходной сигнал, генерируемый искателем 116 (см. фиг.2), получаемый из двух сигналов 146 и 148, которые не являются синфазными и прибывают в мобильную станцию 10 в пределах одного чипа по отношению друг к другу. Аддитивные эффекты двух не являющихся синфазными сигналов являются формой волны 150, имеющей два максимума 152 и 154 соответственно. Максимумы 152 и 154 имеют величину, которая немного больше, чем нормальная, и длительность импульса, которая более узкая, чем нормальная. Вместо единственного импульса при 0,0 чипов, как показано в форме волны по фиг.3, искатель 116 генерирует два узких импульса с максимумами 152 и 154 приблизительно при -0,25 чипа и + 1,25 чипов соответственно. Эта ошибка делает сложным точное определение ТОА.
Следует отметить, что эффекты, показанные в формах волн по фиг. 4 и 5, являются только иллюстративными. Много эффектов многолучевого распространения могут привести к большему количеству сигналов, прибывающих синфазно и не в фазе на антенну 114 (см. фиг. 2) таким образом, что искатель 116 сгенерирует множество максимумов, связанных с единственным сигналом. Данное изобретение обеспечивает по меньшей мере частичную компенсацию ошибок, которые возникают от эффектов многолучевого распространения. Система компенсации, описываемая здесь, не ограничена формами волн или избыточными временами задержки, показанными на фиг. 3 и 4.
Система 100 использует математическую модель 122 для имитации общей кривой корреляционной функции отклика. Форма кривой и действительный максимум и длительность импульса могут быть легко определены с использованием относительно малого числа точек выборки. В примерном варианте осуществления, функция отклика моделируется простой квадратичной функцией, имеющей форму:

где y(x) равно выходной величине корреляции (например, RSSI) как функции от х, где х равно значению в чипах, и а, b и с - коэффициенты. Коэффициенты а, b и с могут быть легко определены с использованием значений корреляции в трех точках выборки. Первой точкой выборки является значение в чипах, в котором был детектирован максимальный уровень сигнала. Это иногда называют «своевременным» значением энергии и может быть математически выражено со ссылкой на уравнение (2) выше как у(0). Два остающихся значения являются значениями корреляции при смежных точках выборки. В вышеприведенном примере, где искатель 116 осуществляет поиск при приращениях в 1/2 чипа, величина корреляции в 1/2 чипа перед величиной времени включения и 1/2 чипа после величины времени включения используются для определения коэффициентов a, b и с. Они могут называться «ранним» значением энергии и «поздним» значением энергии и могут иметь ссылку относительно уравнения (1) выше как у(-0,5) и у(0,5) соответственно.
Коэффициенты а, b и с могут быть легко определены с использованием следующих уравнений:


и

Моделирование функции отклика квадратным уравнением дает возможность точного определения действительного местоположения максимума и простого вычисления длительности импульса. Относительно действительного местоположения максимума фиг.3 иллюстрирует функцию отклика от искателя 116 (см. фиг.2) как точно расположенную в 0 чипов. Однако специалистам в данной области техники будет ясно, что искатель 116 сдвигает хранимый PN код в приращениях в одну вторую чипа. Таким образом, разрешение искателя составляет плюс или минус одна четвертая чипа. А именно, действительное местоположение максимума может быть удалено на четверть чипа от местоположения, определенного искателем 116. Однако анализатор 120 сигналов может точно определить действительное местоположение максимума с использованием коэффициентов а, b и с. После того как действительное местоположение максимума было определено, анализатор сигналов осуществляет определение действительной длительности импульса с использованием математической модели 122. Форма волны по фиг. 6 иллюстрирует моделирование функции отклика квадратным уравнением, где максимальное значение корреляции (например, RSSI) было обнаружено при чипе 0 и указано ссылочной позицией 160. Значение корреляции для раннего значения энергии (т.е. при -0,5 чипа) указано ссылочной позицией 162, тогда как значение корреляции для позднего значения энергии (т.е. при 0,5 чипа) указано ссылочной позицией 164. Значения корреляции в точках 160-164 могут быть введены в вышеприведенные уравнения (2)-(4) для определения значений для коэффициентов а, b, с. По форме волны по фиг. 5 можно определить, что значение максимума находится где-то между чипом 0 и 0,25. Однако можно определить точное местоположение максимума с использованием простой математики. Уравнение (2) является простым квадратным уравнением, производная которого может быть выражена следующим образом:


Наклон кривой, соответствующей уравнению, равен нулю в максимуме. Приравнивая уравнение (5) нулю, мы разрешаем его относительно х и находим, что:
Таким образом, максимум может быть легко определен посредством вычисления коэффициентов а и b.
Для того чтобы вычислить длительность импульса, можно переписать уравнение (1) следующим образом:

Кривая, представленная уравнением (7), также является параболой, точка максимума которой определяется следующим соотношением

Из этих уравнений легко видеть, что А=а и что положение максимума может быть представлено следующим образом:

Система 100 позволяет легко определить длительность импульса путем вычисления точки, в которой парабола спадает в δ раз от максимального значения. Эта точка может быть вычислена в линейном или логарифмическом пространстве. Если это значение вычислено в логарифмическом пространстве, длительность импульса определяется в точке, которая на δ децибел (дБ) ниже максимального значения. Ряд нижеприведенных уравнений иллюстрируют решение в линейном пространстве:

Член δ используется для представления величины спадания параболы от точки максимума (т.е. точки х0). Система 100 динамически изменяет коэффициент δ для согласования увеличения или уменьшения в отношении сигнал-шум (SNR). Например, в одном варианте осуществления система 100 может выбрать δ равным значению 10. А именно, длительность импульса определяется от точки на параболе, где значение уменьшилось от максимума в 10 раз. Однако в присутствии шума (например, с уменьшением SNR) значение δ может быть уменьшено для компенсации того факта, что максимум может не быть столь велик в присутствии шума. Альтернативно, коэффициент δ может быть увеличен в ситуации низкого уровня шума (т.е. с увеличенным SNR) для учета того факта, что импульс может быть более отчетливым в отсутствие шума. Таким образом, система 100 предпочтительно допускает динамическое изменение коэффициента δ для обеспечения более надежного определения длительности импульса.
Несколько исследований по моделированию показали, что длительность импульса сигнала многолучевого распространения является либо большей (когда отдельные максимумы являются синфазными, как показано на фиг. 4), либо меньшей (когда отдельные максимумы не являются синфазными, как показано на фиг. 5), чем нормальный импульс корреляции, показанный на фиг.3.
Анализатор 120 сигналов (см. фиг. 2) вычисляет длительность импульса способом, описанным выше. На основе длительности импульса можно определить, является ли принятый сигнал нормальным сигналом или сигналом многолучевого распространения. Кроме того, можно определить, является ли сигнал многолучевого распространения результатом синфазных сигналов многолучевого распространения, как показано на фиг. 4, или несинфазных сигналов многолучевого распространения, как показано на фиг. 5.
После того как анализатор 120 сигналов определил тип и степень сигнала многолучевого распространения, поправочный коэффициент может быть добавлен к определению местоположения максимума для компенсации сигналов многолучевого распространения и обеспечения более точного определения ТОА. Таблица 1 внизу используется для обеспечения поправочных коэффициентов для компенсации сигналов многолучевого распространения.
Отдельные лучи
Синфазные сигналы
Несинфазные сигналы
Анализатор 120 сигналов добавляет или вычитает чипы или части чипов к местоположению максимального значения (т.е. точке х0) для компенсации эффектов многолучевого распространения. Как показано в таблице 1, анализатор сигналов вычитает инкрементальные величины чипов для синфазных сигналов многолучевого распространения и добавляет дополнительные величины для несинфазных сигналов многолучевого распространения. Как ясно специалистам в данной области техники, более точные сигналы ТОА обеспечивает система 100, приводят к более точному определению местоположения мобильной станции 10.
При текущих телекоммуникационных стандартах, таких как IS-801, стандарт CDMA для определения местоположения, мобильная станция 10 может быть выполнена с возможностью осуществления вычислений с использованием данных ТОА для определения ее местоположения. Однако местоположение мобильной станции 10 может быть определено также частями фиксированной инфраструктуры. В этом варианте осуществления мобильная станция передает данные идентификации и данные измерения задержки к удаленному местоположению, такому как BTS 14. Определяющий положение объект (PDE), связанный с BTS 14, выполняет вычисления и определяет местоположение мобильной станции 10 на основе известных местоположений различных передатчиков и данных задержек, измеренных от каждого передатчика.
Как отмечалось ранее, PDE может быть реализован в пределах самой мобильной станции 10 при условии, что мобильной станции дано точное местоположение различных передатчиков. При текущих телекоммуникационных стандартах эта информация не обеспечивается мобильным станциям, но обеспечивается для различных базовых станций. Если PDE связан с базовой станцией (например, BTS 12), мобильная станция передает детектированные номера PN и времена задержек к PDE, связанному с BTS 12. Времена задержек могут включать в себя измеренные времена задержек и поправочные коэффициенты или могут включать в себя только скорректированные времена задержек. Еще в одном альтернативном варианте осуществления система 100 может передать измеренные длительности импульсов к PDE, связанному, в качестве примера, с BTS 12 для того, чтобы дать возможность осуществить вычисление поправочных коэффициентов в пределах PDE. Данное изобретение не ограничено местоположением, в котором вычисляются поправочные коэффициенты, и применяется к измеренным временам задержек, а также не ограничено местоположением PDE.
В большинстве приложений модель второго порядка уравнения (1) является в общем удовлетворительной для определения ТОА при наличии сигналов многолучевого распространения и обеспечивает допустимую степень точности в определении положения мобильной станции 10 (см. фиг. 1) с использованием стандартных способов AFLT. Однако если желательна большая точность, можно обеспечить математическую модель более высокого порядка для моделирования корреляционной функции отклика. Например, уравнение третьего порядка может более близко моделировать желаемую функцию. Специалистам в данной области техники будет ясно, что функции высокого порядка потребуют большего числа точек выборки для определения коэффициентов. Однако математическое моделирование функции отклика может все же быть эффективно осуществлено данным изобретением. Принципы данного изобретения могут быть обобщены для модели третьего порядка или модели любого другого более высокого порядка. Функция второго порядка выбрана как компромиссное решение между точностью и временем обработки. Следует отметить, что в случае квадратного уравнения три вычисленных точки данных (т.е. раннее значение энергии, своевременное значение энергии и позднее значение энергии) все пересекаются с действительной функцией отклика и, таким образом, обеспечивают допустимую степень точности в определении точного местоположения максимума и длительности импульса.
Работа системы 100 показана на блок-схеме последовательности операций по фиг. 7, где в начале 200 мобильная станция 10 включена. На этапе 202 система 100 детектирует импульс корреляции и вычисляет значение корреляции. Как известно в данной области техники, значение корреляции может быть указано различными типами измерений, таких как общая энергия, энергия пилот-сигнала на PN чип, RSSI и т.п. Мобильная станция 10 сравнивает хранимый PN код с PN кодом, принятым приемником 110 (см. фиг. 2). Если PN коды совпадают, то относительно высокое значение корреляции будет вычислено на этапе 202.
На этапе 204 система 100 определяет SNR стандартным образом. Например, максимальное значение корреляции может быть сравнено с минимальным фоновым шумом для определения SNR.
На этапе 206 система 100 выбирает значение для параметра δ на основе, например SNR, вычисленного на этапе 204. Показатель δ может быть вычислен с использованием других показателей, таких как общая энергия, энергия пилот-сигнала на символ псевдошумовой (PN) последовательности (чип), спектральная плотность мощности и другие параметры, известные в данной области техники.
На этапе 208 анализатор 120 сигналов (см. фиг. 2) вычисляет коэффициенты, связанные с математической моделью 122. В примере, где квадратное уравнение используется для моделирования функции отклика, сигнал максимальной энергии, определенный искателем 116, и раннее значение энергии и позднее значение энергии используются для определения коэффициентов. На этапе 210 анализатор 120 сигналов определяет местоположение действительного максимума.
На этапе 212 анализатор сигналов определяет длительность импульса для выбранного значения δ. А именно, анализатор 120 сигналов использует вычисленные коэффициенты и выбранное значение для δ для определения длительности импульса. На этапе 214 анализатор 120 сигналов определяет тип многолучевого распространения. Например, анализатор сигналов может определить, что сигнал многолучевого распространения возникает из синфазных сигналов многолучевого распространения, которые разделены одной второй чипа. На этапе 216 анализатор сигналов применяет соответствующий поправочный коэффициент с использованием в качестве примера данных, приведенных в таблице 1. В примере, обсужденном выше, анализатор сигналов вычитает четверть чипа из вычисленного ТОА для компенсации эффектов многолучевого распространения. Этот процесс завершается этапом 218, характеризуемым системой 100, скомпенсировавшей сигналы многолучевого распространения и обеспечивающей более точное ТОА.
Специалистам в данной области техники будет ясно, что процесс, описанный выше, используется для внесения поправки на эффекты многолучевого распространения от одной базовой станции или спутника (например, BTS 12). Тот же самый процесс применяется к сигналам корреляции от других BTS (например, BTS 14-16) или сигналам от спутника GPS (например, спутника 18). Таким образом, система 100 обеспечивает компенсацию эффектов многолучевого распространения от любой BTS или спутника и обеспечивает более точные данные ТОА. На основе скорректированных данных ТОА может быть осуществлено более точное определение местоположения. Фактическое вычисление местоположения на основе данных ТОА известно в данной области техники и не нуждается в описании здесь. Однако отсюда следует, что более точные данные ТОА, обеспеченные системой 100, приводят к более точному вычислению местоположения мобильной станции 10. Такая повышенная точность может быть критической в определении местоположения мобильной станции 10, если службы помощи при чрезвычайных ситуациях запрашиваются абонентом.
Хотя система 100 была описана по отношению к двум сигналам многолучевого распространения, принципы данного изобретения могут быть распространены на три или более сигналов многолучевого распространения. Альтернативно, система 100 может разумно моделировать эффекты трех или более сигналов многолучевого распространения с использованием системы, описанной выше. Результирующее увеличение в точности данных ТОА обеспечивает более точное определение местоположения мобильной станции 10.
Следует понимать, что даже хотя различные варианты осуществления и преимущества данного изобретения были изложены в предшествующем описании, вышеприведенное описание является только иллюстративным и могут быть сделаны изменения в деталях, которые остаются в широких рамках принципов изобретения. Следовательно, данное изобретение должно быть ограничено только прилагаемой формулой изобретения.
Все из вышеприведенных патентов США, публикаций заявок на патент США, заявок на патент США, иностранных патентов, иностранных заявок на патент и непатентных публикаций, на которые сделаны ссылки в этом описании, полностью включены в материалы настоящей заявки посредством ссылки.

Изобретение относится к области связи. Техническим результатом является уменьшение эффекта ошибок времени прибытия сигнала, переданного от базовой приемо-передающей станции (ТОА). В мобильной станции импульс корреляции генерируется, когда обнаружен сигнал, переданный от базовой станции. Передаваемый сигнал может быть отражен или дефрагирован таким образом, что в мобильную станцию поступают сигналы многолучевого распространения. Это ведет к искажению в генерируемом импульсе корреляции и ошибкам в точных измерениях ТОА. Данное изобретение моделирует функцию отклика и вычисляет длительность импульса с использованием моделирующей функции с динамически регулируемым коэффициентом для указания того, в какой точке ниже максимума будет вычислена длительность импульса. На основе вычисления длительности импульса может быть определен тип сигнала многолучевого распространения, и соответствующий поправочный коэффициент применяется к измеренному ТОА для обеспечения более точного определения ТОА. Система может применять поправочные коэффициенты к сигналам ТОА от базовых станций в мобильных телефонах или к сигналам, принимаемым от спутников глобальной системы позиционирования (GPS). 3 н. и 20 з.п. ф-лы, 7 ил., 1 табл.
искатель для анализа принимаемых сигналов с целью определения уровня импульса сигнала корреляции в заранее заданных точках во времени, причем этот искатель определяет максимальный уровень импульса сигнала корреляции в одной из упомянутых заранее заданных точек во времени, и
анализатор сигналов для генерации математической модели заранее заданной функции отклика с использованием максимального уровня импульса сигнала корреляции и уровней импульса сигнала корреляции из заранее заданных точек во времени, примыкающих к точке во времени, в которой был определен максимальный уровень импульса сигнала корреляции, причем этот анализатор сигналов определяет местоположение во времени действительного максимального уровня импульса сигнала корреляции согласно упомянутой математической модели заранее заданной корреляционной функции отклика и, на основе действительного максимального уровня импульса сигнала корреляции, определяет длительность импульса сигнала корреляции, и применяет к времени прибытия сигнала, переданного от базовой приемопередающей станции, поправочный коэффициент, выбранный на основе определенной длительности импульса сигнала корреляции, для генерации скорректированного времени прибытия сигнала, переданного от базовой приемопередающей станции.
средство для анализа принимаемых сигналов для определения уровня импульса сигнала корреляции в заранее заданных точках во времени,
средство для определения максимального уровня импульса сигнала корреляции в одной из упомянутых заранее заданных точек во времени, и
средство анализа для генерации математической модели заранее заданной функции отклика с использованием максимального уровня импульса сигнала корреляции и уровней импульса сигнала корреляции из заранее заданных точек во времени, примыкающих к точке во времени, в которой был определен максимальный уровень импульса сигнала корреляции, причем это средство анализа определяет местоположение во времени действительного максимального уровня импульса сигнала корреляции согласно упомянутой математической модели заранее заданной корреляционной функции отклика и, на основе действительного максимального уровня импульса сигнала корреляции, определяет длительность импульса сигнала корреляции, и применяет к времени прибытия сигнала, переданного от базовой приемопередающей станции, поправочный коэффициент, выбранный на основе определенной длительности импульса сигнала корреляции, для генерации скорректированного времени прибытия сигнала, переданного от базовой приемопередающей станции.
анализируют принимаемые сигналы для определения уровня импульса сигнала корреляции в заранее заданных точках во времени,
определяют максимальный уровень импульса сигнала корреляции в одной из упомянутых заранее заданных точек во времени,
генерируют математическую модель заранее заданной функции отклика с использованием максимального уровня импульса сигнала корреляции и уровней импульса сигнала корреляции из заранее заданных точек во времени, примыкающих к точке во времени, в которой был определен максимальный уровень импульса сигнала корреляции, и
определяют местоположение во времени действительного максимального уровня импульса сигнала корреляции согласно упомянутой математической модели заранее заданной корреляционной функции отклика и, на основе действительного максимального уровня импульса сигнала корреляции, определяют длительность импульса сигнала корреляции, и применяют к времени прибытия сигнала, переданного от базовой приемопередающей станции, поправочный коэффициент, выбранный на основе определенной длительности импульса сигнала корреляции, для генерации скорректированного времени прибытия сигнала, переданного от базовой приемопередающей станции.
| Стенд для моделирования невесомости двухзвенных механизмов | 1983 |
|
SU1089452A1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ | 1996 |
|
RU2137150C1 |
| US 5828694 А, 27.10.1998 | |||
| US 6198765 В1, 06.03.2001. | |||

