Область техники, к которой относится изобретение
Представленное раскрытие, в целом, относится к беспроводной связи, сетям беспроводной связи и узлам и устройствам беспроводной связи.
Уровень техники
Услуги на основе определения местоположения и позиционирование аварийных вызовов являются движущей силой в развитии позиционирования в сетях беспроводной связи и множество приложений и служб на терминалах используют в своих интересах возможность получения доступа к расположению устройства(-ов). Позиционирование в системе долгосрочной эволюции (Long-Term Evolution, LTE) поддерживается архитектурой, показанной на фиг. 1, с прямыми взаимодействиями между оборудованием 1 пользователя (User Equipment, UE) и сервером 2 позиционирования, а именно, развитым сервисным центром 2 позиционирования местонахождения мобильных устройств (Evolved-Serving Mobile Location Centre, E-SMLC) по протоколу позиционирования LTE (LTE Positioning Protocol, LPP). Кроме того, существуют также взаимодействия между сервером 2 позиционирования и eNodeB 3 по протоколу LPPa, в некоторой степени поддерживаемому взаимодействиями между eNodeB 3 и UE 1 по протоколу управления радиоресурсами (Radio Resource Control, RRC).
В LTE (3GPP 36.305) рассматриваются следующие технологии позиционирования:
- Улучшенный идентификатор ячейки (Identifier, ID), который, по существу, состоит из информации об ID ячейки, чтобы связывать UE с зоной обслуживания сервисной ячейки, а также дополнительной информации для определения положения при более мелкой гранулярности.
- Вспомогательная информация глобальной системы спутниковой навигации (Global Navigation Satellite System, GNSS), которая извлекается UE, поддерживаемым вспомогательной информацией, предоставляемой для UE от Е-SMLC.
- Наблюдаемая разница во времени прибытия (Observed Time Difference of Arrival, OTDOA), с помощью которой UE оценивает разницу во времени для опорных сигналов от различных базовых станций и посылает ее на Е-SMLC для выполнения мультилатерации. Мультилатерация является технологией навигации, основанной на измерении разности расстояний до двух станций, расположенных в известных местах, которые широковещательно передают сигналы в известные моменты времени.
- Наблюдаемая разность по времени по восходящему каналу (UTDOA), когда от UE запрашивают передачу определенного сигнала, который обнаруживается многочисленными блоками измерения местоположения (например, улучшенными универсальными наземными NodeB (eNB) сети радиодоступа (Evolved Universal Terrestrial Radio Access Network)), расположенными в известных местах. Эти результаты измерений передаются на Е-SMLC для мультилатерации.
В перечисленных выше способах позиционирования важно оценивать время прибытия (time-of-arrival, TOA) сигнала в узел получателя от узла отправителя. Информация TOA может объединяться, чтобы формировать результаты измерений, которые поддерживают различные основополагающие способы позиционирования:
- разность между двумя TOA от двух различных узлов отправителей, формирующая результат измерения разности во времени для времени прибытия, например, TDOA по нисходящему каналу;
- разность между двумя TOA, полученными в двух различных узлах получателя, основываясь на сигнале от конкретного узла отправителя, формирующего результат измерения разности во времени прибытия, например, TDOA для восходящего канала;
- разность между TOA в узле и последующее время передачи, указывающее время обработки в узле, а также разность между TOA в узле и временем предыдущей передачи, указывающим полное время распространения в оба конца, формируя компоненты в процедуре определения дальности.
Все подходы, основанные на TOA, преобразуют результаты измерений в расстояния и относительные расстояния, основываясь на скорости распространения сигналов в рассматриваемой среде.
В обычном сценарии, показанном на фиг. 2, UE А 1a обслуживается/управляется сервисным/управляющим узлом 6. Кроме того, UE А 1a может обнаруживать сигнал от одного или более несервисных/неуправляющих узлов 7.
UE 1 может оценивать TOA сигнала от одного узла, возможно, подвергнутого сигналу помехи от другого узла в пределах области покрытия или дальности связи. Альтернативно, можно избежать значительных помеховых сигналов от других узлов, используя схему шумоподавления, где узлы чередуют передачу и шумоподавление согласно расписанию. Сценарий может также инвертироваться, чтобы TOA оценивалось на узле, основываясь на сигнале от UE А 1a, возможно, подвергаемом воздействию помехи от сигналов других UE B 1b. Кроме того, сценарий может также быть UE 1a, оценивающим TOA, основываясь на сигнале от другого UE, или узлом, оценивающим TOA, основываясь на сигнале от другого узла.
На фиг. 3 показана мультилатерация в OTDOA, рассматривающая eNB1 3a в качестве опорной ячейки. Например, наблюдаемая разница во времени прибытия (Observed Time Difference Of Arrival, OTDOA) является способом, выполняемым с помощью UE, в котором UE 1 измеряет время прибытия (time of arrival, TOA) конкретных опорных сигналов позиционирования (Positioning Reference Signal, PRS) от многочисленных ячеек (таких как eNB 3) и в котором UE 1 вычисляет относительные разности между каждой ячейкой и опорной ячейкой. Эти разности во времени относительно опорного сигнала (Reference Signal Time Difference, RSTD) квантуются и сообщаются через LPP на Е-SMLC 2 вместе с оценкой точности. Основываясь на известных позициях eNB 3 и их взаимной временной синхронизации, для Е-SMLC 2 возможно оценить расположение UE 1, исходя из отчетов по RSTD и ковариации, используя мультилатерацию. Точность зависит от условий распространения радиоволн принятых сигналов, количества принятых сигналов, а также от развертывания, что означает, что она будет пространственно меняться. Одним из факторов, существенно влияющих на характеристики OTDOA, являются допущения по модели приемника UE 1 и то, как он оценивает TOA.
Определение TOA
Каналы беспроводной связи обычно моделируются как каналы многолучевого распространения, означая, что приемный узел принимает несколько копий переданного сигнала, искаженных и задержанных посредством многократных отражений, дифракции и т.д. Эффект многолучевого распространения может быть смоделирован, рассматривая следующий разветвленный канал связи с задержкой.

где L - количество многолучевых разветвлений (то есть, количество сигналов, принимаемых в UE), al обозначает комплексное затухание l-ответвления (то есть, затухание принятого l-сигнала), τl указывает временную задержку l-ответвления, и δ(t) - дельта-функция, которая равна единице, когда t = 0, и нулю во всех других случаях. Чтобы определить географическое расстояние между антеннами передатчика и приемника, следует измерить τ0 (временную задержку, соответствующую ответвлению на линии прямой видимости (line-of-sight, LOS) и масштабировать ее с помощью скорости света.
TOA сигнала может быть измерено на основе опорного сигнала, который известен приемнику. Допустим, что переданный сигнал обозначается как "x (t)", тогда принятый сигнал "y (t)", подвергнутый воздействию многолучевого канала, представляется как

где w(t) моделирует аддитивный шум и помеху. Основываясь на принятом сигнале y(t) и предшествующем знании переданного опорного сигнала x(t), приемник заинтересован в вычислении времени задержки τ0 ответвления первого канала (то есть, TOA сигнала LOS или сигнала, который прибывает самым первым, если нет никаких LOS, поскольку он преобразуется в расстояние между передатчиком и приемником). Однако, поскольку принятый сигнал встраивается в шум и помеху, не всегда легко определить первое ответвление канала, если оно недостаточно сильное, что обычно имеет место, например, в сценариях внутри помещений.
Могут существовать различные способы определения TOA в приемнике. Простой и широко используемый способ состоит в кросс-корреляции принятого сигнала с известным переданным опорным сигналом, используя выражение:
где K является длительностью представления дискретной области принятого сигнала. Функция R(τ) кросс-корреляции дает импульсную реакцию канала. Абсолютное значение R(τ) соответствует профилю профильной задержки (Profile Delay Profile, PDP) канала. Следующий этап состоит в определении первого канального ответвления, которое может быть оценено, определяя первый пик  в R[τ], который является приведенным выше определенным порогом, используя
в R[τ], который является приведенным выше определенным порогом, используя
Нахождение компонента LOS, основываясь на кросс-корреляции, как обсуждалось выше, является непростой задачей для UE 1. UE 1 необходимо найти соответствующий порог, чтобы обнаружить компонент LOS, поскольку ответвление LOS, обычно не является самым мощным ответвлением. Если порог слишком низкий, приемник может ложно обнаруживать шум как первое канальное ответвление, а если порог слишком высокий, приемник может пропустить слабый сигнал LOS. Поэтому, обычно существует компромисс между обнаружением LOS и устойчивостью к шуму. Например, на фиг. 4a и 4b показаны ситуации, где UE, реализующее порог 11 (горизонтальная непрерывная черная линия на чертежах), основываясь на способе, не в состоянии оценить соответствующий TOA, указывая проблемы, связанные с порогом, основанным на пиковом обнаружении. На этих чертежах, xcorr 8 указывают результаты измерений кросс-корреляции, линия 9 указывает точное время, тогда как линия 10 указывает расчетное время, причем эти времена соответствуют результатам измерений расстояния. Фиг. 4a показывает ситуацию, в которой наличие более низкого порогового значения 11 может значительно улучшить оценку TOA. Фиг. 4b показывает пример ситуации, в которой наличие более высокого порогового значения может значительно улучшить оценку TOA.
Для решения этой проблемы на форуме RAN1#86bis было согласовано, что многолучевая обратная связь по RSTD может сообщаться в объеме до 2 пиков для каждой ячейки.
Дополнительные пики, сообщаемые для позиционирования по нисходящему каналу
Позиционирование по нисходящему каналу основано на оценке времени прибытия (TOA) для UE 1 опорных сигналов позиционирования (positioning reference signal, PRS) от опорной и соседней ячеек. Приемник UE 1 может обнаруживать несколько появлений или пиков корреляции от конкретной ячейки во временном окне и UE может попытаться идентифицировать опорный пик как наиболее вероятный пик на линии прямого видения. Пики, более поздние по времени, рассматриваются как относящиеся к распространению не по линии прямой видимости, а пики, более ранние по времени, считаются появляющимися благодаря шумам. Сообщение о дополнительных пиках позволяет способным на это UE 1 также сообщать о дополнительных пиках от опорной и/или соседних ячеек.
На фиг. 5 показаны опорные и дополнительные пики в принятых опорных сигналах позиционирования от опорной ячейки и соседней ячейки. Этот чертеж показывает возможную ситуацию на приемнике UE 1 как для опорного пика, так и для дополнительных пиков от опорной ячейки и соседней ячейки. В этом примере приемник UE 1 обнаружил многочисленные пики TOA как для опорной ячейки, так и для соседней ячейки i. Для опорной ячейки и для соседней ячейки UE 1 оценивает опорный пик TOA, t0 и ti, соответственно. Разность во времени относительно опорного сигналам определяется UE 1 как разность во времени между этими опорными пиками. Опорный пик может быть выбран, основываясь на различных стратегиях, таких как пик с наибольшей вероятностью в качестве соответствующего первого пика или первый пик из числа обнаруженных пиков. Выбор опорного пика зависит от конкретной реализации.
Кроме того, существуют дополнительные пики, показанные на фиг. 5, которые представляются относительной разницей во времени по отношению к опорному пику. Для опорной ячейки с опорным пиком TOA t0 и TOA дополнительных пиков t0,1 и t0,2, дополнительные пики представляются относительными разностями по времени δ0,1 = t0,1 - t0 и δ0,2 = t0,2 - t0. Точно также, для соседней ячейки i с опорным пиком TOA ti и TOA дополнительных пиков ti, 1 и ti, 2, дополнительные пики представляются относительными разностями во времени δi,1 = ti,1 - ti и δ0,2 = ti,2 - ti.
Раскрытие сущности изобретения
В настоящее время существует определенная проблема(-ы).
В результате того, что UE выбирает компромисс между устойчивостью к шумам и обнаружением LOS, могут создаваться результаты измерений с очень высокой степенью неопределенности. В некоторых ситуациях, со многими "слышимыми" ячейками может быть возможным принимать некоторые шумовые пики, тогда как другие могут за это расплачиваться. В то же время, в редких ячейках, которых может быть немного, может быть невозможным обнаружить шумовой пик, поскольку может быть невозможно точно определить позицию.
Дополнительно, алгоритм позиционирования в сетевом узле может иметь различные возможности исключения результатов измерений, вызванных шумовыми пиками. Хотя обратная связь по RSTD при многолучевом распространении была согласована в качестве стандартизированной, подробности того, как эффективно помочь UE на этот счет, остаются неисследованными.
Некоторые подходы представленного раскрытия и их варианты осуществления могут обеспечить решения этих или других проблем.
Обеспечивается способ, выполняемый в целевом устройстве, для обеспечения измерений наблюдаемой разности времени прибытия (OTDOA) для разности во времени относительно опорного сигнала (Reference Signal Time Difference RSTD) по отношению к серверу позиционирования. Способ содержит этап посылки серверу позиционирования индикации о способности поддерживать результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении. Способ также содержит этап приема от сервера позиционирования запроса результатов измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении. Способ дополнительно содержит этап приема от сервера позиционирования вспомогательных данных, обеспечивающих подробности затребованных измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении. Способ также содержит этап приема сигнала от опорной ячейки RSTD и от соседней ячейки и этап наблюдения разности во времени между принятыми сигналами, получая, таким образом, требуемые результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении. Способ также содержит этап посылки серверу позиционирования затребованных результатов измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении .
Обеспечивается способ, выполняемый на сервере позиционирования, для приема от целевого устройства результатов измерений разности во времени относительно опорного сигнала (RSTD) для наблюдаемой разности по времени прибытия (OTDOA). Способ содержит этап приема от целевого устройства индикации о возможности поддержки измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении. Способ также содержит этап передачи целевому устройству запроса измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении. Способ дополнительно содержит этап передачи целевому устройству вспомогательных данных, обеспечивающих подробности по затребованным измерениям позиционирования по OTDOA, используя RSTD при многолучевом распространении, и этап приема от целевого устройства затребованных результатов измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении.
Обеспечивается устройство беспроводной связи, действующее с целью предоставления серверу позиционирования результатов измерений обеспечения разности во времени относительно опорного сигнала (RSTD) для наблюдаемой разности по времени прибытия (OTDOA). Беспроводное устройство содержит схему обработки и память, причем память содержит команды, исполняемые схемой обработки, за счет чего беспроводное устройство действует так, чтобы передавать серверу позиционирования индикацию возможности поддержки измерения позиционирования по OTDOA, используя RSTD при многолучевом распространении. Беспроводное устройство также выполнено с возможностью приема от сервера позиционирования запроса результатов измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении, и приема от сервера позиционирования вспомогательных данных, предоставляющих подробности затребованных измерений позиционирования по OTDOA, используя RSTD . Беспроводное устройство дополнительно выполнено с возможностью приема сигнала от опорной ячейки RSTD и от соседней ячейки, чтобы наблюдать разность во времени между принятыми сигналами, получая, таким образом, требуемые результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении, и передачи серверу позиционирования затребованных результатов измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении.
Обеспечивается сервер позиционирования, выполненный с возможностью приема от беспроводного устройства результатов измерений разности во времени относительно опорного сигнала (RSTD) для наблюдаемой разности по времени прибытия (OTDOA), где сервер позиционирования содержит схему обработки и память, причем память содержит команды, исполняемые схемой обработки, за счет чего сервер позиционирования действует с возможностью приема от беспроводного устройства индикации о возможности поддержки измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении. Сервер позиционирования также выполнен с возможностью передачи беспроводному устройству запроса измерения позиционирования по OTDOA, используя RSTD и передачи беспроводному устройству подробностей затребованных результатов измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении. Сервер позиционирования дополнительно выполнен с возможностью приема от беспроводного устройства затребованных результатов измерения позиционирования по OTDOA, используя RSTD при многолучевом распространении.
Краткое описание чертежей
Фиг. 1 - схематичное представление архитектуры позиционирования в системе LTE.
Фиг. 2 - схематичное представление двух ячеек с двумя узлами и двумя UE в соответствии с примером.
Фиг. 3 – схематичное представление оценки позиции OTDOA, основываясь на мультилатерации результатов измерений RSTD в соответствии с примером.
Фиг. 4a и 4b - графики оценки расстояний, основанные на кросс-корреляции в соответствии с некоторыми примерами.
Фиг. 5 – схематичное представление пиков в опорных сигналах позиционирования в соответствии с примером.
Фиг. 6 - блок-схема последовательности выполнения операций способа в соответствии с вариантом осуществления.
Фиг. 7 - блок-схема последовательности выполнения операций способа в соответствии с другим вариантом осуществления.
Фиг. 8 - блок-схема последовательности выполнения операций способа в соответствии с другим вариантом осуществления.
Фиг. 9 - блок-схема последовательности выполнения операций способа в соответствии с другим вариантом осуществления.
Фиг. 10 – схематичное представление нормализованного профиля задержки профиля в соответствии с примером.
Фиг. 11 - график вероятности пиковых амплитуд для низкого и высокого значений σ в соответствии с примером.
Фиг. 12 - блок-схема последовательности выполнения операций способа в соответствии с другим вариантом осуществления.
Фиг. 13 - блок-схема последовательности выполнения операций способа в соответствии с другим вариантом осуществления.
Фиг. 14a – схематичное представление беспроводной сети в соответствии с вариантом осуществления.
Фиг. 14b - схематичное представление оборудования пользователя в соответствии с вариантом осуществления.
Фиг. 14c - схематичное представление беспроводного устройства в соответствии с вариантом осуществления.
Фиг. 14d - схематичное представление сетевого узла в соответствии с вариантом осуществления.
Фиг. 15 - среда виртуализации, в которой могут быть реализованы функции, соответствующие некоторому варианту(-ам) осуществления.
Осуществление изобретения
В целом, все термины, используемые здесь, должны интерпретироваться в соответствии с их обычным значением в технической области, если здесь явно не определено иное. Все ссылки на "элемент, устройство, компонент, средство, этап и т. д." должны интерпретироваться открыто, как относящиеся по меньшей мере к одному конкретному примеру элемента, устройства, компонента, средства, этапа и т. д., если явно не утверждается иное. Этапы любого способа, раскрытого здесь, не должны выполняться точно в раскрытом порядке, если явно не заявляется иное.
Различные признаки и варианты осуществления будут теперь описаны со ссылкой на чертежи, чтобы полностью передать контекст раскрытия специалистам в данной области техники. Многочисленные подходы будут описаны с точки зрения последовательностей действий или функций. Следует понимать, что в некоторых вариантах осуществления некоторые функции или действия могли выполняться специализированными схемами, программными командами, исполняемыми одним или более процессорами, или сочетанием того и другого. Дополнительно, некоторые варианты осуществления могут быть частично или полностью реализованы в форме считываемого компьютером носителя или несущей волны, содержащей соответствующий набор компьютерных команд, которые могут заставить процессор выполнять описанные здесь способы. В некоторых альтернативных вариантах осуществления функции/действия могут отличаться от порядка, обозначенного в последовательности действий, или осуществляться одновременно. Дополнительно, на некоторых чертежах некоторые блоки, функции или действия могут быть необязательными и могут выполняться или не выполняться; они обычно показываются пунктирными линиями.
В соответствии с вариантом осуществления, сетевой узел, такой как сервер 2 позиционирования, может конфигурировать UE 1 с вероятностным порогом или/и с ожидаемым результатом многолучевого измерения для различных многолучевых сценариев, чтобы рассмотреть принятие компромисса между обнаружением LOS и устойчивостью к шумам.
Чтобы это сделать, информация о поддержке может быть передана от сетевого узла к компоненту приемника, чтобы поддержать оценку TOA в условиях возможного многолучевого распространения. Компонент приемника может быть UE 1 или беспроводным устройством, но может также быть узлом приемника, в более общем смысле, например, базовой станцией 3.
На фиг. 6 представлен способ 60 с точки зрения компонента приемника в соответствии с вариантом осуществления, содержащий этапы, на которых:
- как вариант, на этапе 61 передают посредством компонента приемника сетевому узлу сообщение о возможности создания отчета о многолучевом распространении и приема реакции;
- на этапе 62 получают посредством приемника от сетевого узла информацию о поддержке оценки времени прибытия (Time of Arrival, TOA) в возможных условиях многолучевого распространения;
- на этапе 63 принимают посредством компонента приемника сигнал и оценивают информацию TOA, основываясь на принятом сигнале и на полученной информации поддержки; и
- на этапе 64 посылают сетевому узлу посредством компонента приемника информацию TOA или обрабатывают информацию TOA.
Этап 64 обработки информации TOA может выполняться в беспроводном устройстве локально.
На фиг. 7 показан способ 70 с точки зрения сетевого узла в соответствии с вариантом осуществления, содержащий этапы, на которых:
- как вариант, на этапе 71 сетевой узел получает от компонента приемника сообщение о возможности создания отчета о многолучевом распространении и обеспечивает реакцию;
- на этапе 72 определяют посредством сетевого узла, с учетом компонента приемника, информацию о поддержке оценки TOA в возможных условиях многолучевого распространения;
- на этапе 73 передают компоненту приемника посредством сетевого узла информацию о поддержке; и
- на этапе 74 принимают от компонента приемника посредством сетевого узла информацию позиционирования.
Альтернативно выражаясь, обеспечивается способ 70, исполняемый в сетевом узле вершине, содержащий этапы, на которых:
− на этапе 72 определяют с учетом беспроводного устройства информацию поддержки для оценки TOA в возможных условиях многолучевого распространения;
− на этапе 73 посылают информацию поддержки беспроводному устройству; и
− на этапе 74 получают от беспроводного устройства информацию позиционирования.
Способ может дополнительно на этапе 71 содержать получение от беспроводного устройства сообщения о возможности создания отчета о многолучевом распространении и обеспечение этапа на этапе 71.
Этапы вышеупомянутых способов описываются ниже и более подробно. Информация поддержки, посланная целевому устройству в возможных сценариях многолучевого распространения, а также рассматриваемые действия, в различных вариантах осуществления могут отличаться. В одном из вариантов осуществления сетевой узел сигнализирует на UE индикацию об ожидаемом многолучевом распространении. Когда индикация устанавливается как TRUE (истина) (или интерпретируется как TRUE, например, в некотором контексте, когда индикация явно пропущена), UE интерпретирует эту индикацию как вероятность, что возможно многолучевое распространение. Это может стимулировать UE явно искать, обнаруживать и/или измерять дополнительные пики в принятом сигнале. Индикация может быть подана как общая или в отношении одной или более ячеек или опорных сигналов или принятого пакета или пакетов.
Сетевой узел может инициировать посылку первому UE ожидаемой индикации о многолучевом распространении, установленной как TRUE, в случаях:
- когда существует архивная информация, указывающая, что UE ранее сообщали о многолучевом распространении и/или о дополнительных пиках:
o при том же самом сервисном узле, что и узел, обслуживающий первое UE;
o при том же самом приблизительном расположении, что и первое UE, например, при той же самой информации об области слежения/области позиционирования/области маршрутизации (информации, связывающей UE с набором ячеек, узлов, опорных сигналов), что и первое UE;
o по меньшей мере при одной ячейке/узле/опорном сигнале во вспомогательных данных, предоставляемых для UE, являющихся теми же самыми, что и для первого UE;
- когда существует архивная информация, указывающая, что UE ранее были позиционированы с относительно низкой точностью:
o например, были определены путем сравнения позиционирования, основываясь по меньшей мере на двух способах позиционирования, таких как глобальная система спутниковой навигации (Global Navigation Satellite System, GNSS), с одной стороны, и способе, основанном на TOA, с другой стороны;
- в соответствии с информацией о развертывании узла:
o когда узел развертывается в среде с высоким рассеиванием, например, внутри помещений или на городских территориях с плотной застройкой.
Когда индикация устанавливается как FALSE (ложь) (или интерпретируется как FALSE, например, в некотором контексте, если индикация явно пропущена), UE интерпретирует это как индикацию, что маловероятно, что многолучевое распространение может иметь место. Это может стимулировать UE воздержаться от поиска, обнаружения и/или измерения дополнительных пиков в принятом сигнале. Индикация может быть подана как общая или в отношении одной или более ячеек или опорных сигналов или принятого пакета или пакетов.
Сетевой узел может инициировать посылку первому UE ожидаемой индикации многолучевого распространения, установленной как FALSE в случаях:
- когда существует архивная информация, указывающая, что UE ранее не сообщали о многолучевом распространении и/или дополнительных пиках:
o при том же самом сервисном узле, что и узел, обслуживающий первый UE;
o при том же самом приблизительном расположении, что и первое UE, например, при той же самой информации об области слежения/области позиционирования/области маршрутизации (информация, связывающая UE с набором ячеек, узлов, опорных сигналов), что и первое UE;
o по меньшей мере при одной ячейке/узле/опорном сигнале во вспомогательных данных, предоставляемых для UE, являющихся теми же самыми, что и первое UE;
- когда существует архивная информация, указывающая, что UE ранее были позиционированы с относительно высокой точностью, без учета информации о дополнительных пиках:
o например, определенная путем сравнения позиционирования, основываясь по меньшей мере на двух способах позиционирования, таких как GNSS, с одной стороны, и способ на основе TOA, с другой стороны;
- в соответствии с информацией о развертывании узла:
o если узел развертывается в среде с низким рассеиванием, например, на открытых пространствах.
На фиг. 8 представлен способ 80 с точки зрения UE, соответствующий варианту осуществления, в котором информацией поддержки TOA является индикация ожидаемого многолучевого распространения, содержащая этапы, на которых:
- получают на этапе 81 от сетевого узла с помощью UE индикацию ожидаемого многолучевого распространения, как вариант, в связи с одной или более ячейками/узлами/опорными сигналами;
- в случае, когда индикация интерпретируется как TRUE, на этапе 82 инициируют с помощью UE поиск/обнаружение/измерение дополнительных пиков ячейки/узла/опорного сигнала;
- в случае, если индикация интерпретируется как FALSE, на этапе 83 воздерживаются посредством UE от поиска/обнаружения/измерения дополнительных пиков ячейки/узла/опорного сигнала; и
- UE на этапе 84 сообщает информацию позиционирования.
Выражаясь иначе, фиг. 8 показывает способ 80, выполняемый на UE, когда информация поддержки TOA является индикацией ожидаемого многолучевого распространения, и упомянутый способ содержит этапы, на которых:
− на этапе 81 получают от сетевого узла индикацию ожидаемого многолучевого распространения;
− на этапе 82, если индикация интерпретируется как TRUE, инициируют поиск/обнаружение/измерение дополнительных пиков ячейки/узла/опорного сигнала;
− на этапе 83, в случае, если индикация интерпретируется как FALSE, воздерживаются от поиска/обнаружения/измерения дополнительных пиков ячейки/узла/опорного сигнала; и
− на этапе 84 сообщают информацию позиционирования.
Способ, в котором на этапе 81 индикация многолучевого распространения находится в связи с одной или более ячейками/узлами/опорными сигналами.
Приведенные ниже последовательности показывают пример влияния сигнализации в соответствии с вариантом осуществления.
Для оценки TOA существует важный компромисс между обнаружением линии прямой видимости (Line of Sight, LOS) и устойчивостью к шумам. Учитывая принятый сигнал, UE 1 может проанализировать различные пики, из которых каждый пик связывается со значением, таким как принятая мощность, кросс-корреляция и т. д. сигнала относительно порога, и рассматривать пики выше порога как действительные пики, а пики ниже порога как шумовые пики. Вместо использования порога с заданным значением, может использоваться пиково-вероятностный порог. Пиково-вероятностный порог может быть основан, например, на данных развертывания ячейки и сетевом алгоритме позиционирования. Оценка TOA в этом случае определяется на основе идентифицированных (действительных) пиках, где действительный пик – это пик выше вероятностного порога, а оценка TOA может быть определена, например, как первый из действительных пиков.
На фиг. 9 показан способ 90 с точки зрения UE, соответствующий варианту осуществления, который содержит этапы, на которых:
- на этапе 91 конфигурируют UE посредством сети или принимают установки для конфигурации от сетевого узла, чтобы выполнить оценку TOA, в том числе, пиково-вероятностный порог;
- на этапе 92 обнаруживают сигнал посредством UE и оценивают распределение шумовых пиков (Noise Peak Distribution, NPD);
- на этапе 93 используют посредством UE конфигурацию соотношения пики-вероятности и NPD, чтобы обнаружить действительные пики; и
- на этапе 94 определяют посредством UE TOA, основываясь на действительных пиках, и сообщают сетевому узлу набор TOA.
Иначе говоря, на фиг. 9 представлен способ 90, выполняемый в UE, содержащий этапы, на которых:
− на этапе 91 принимают от сетевого узла установки конфигурации для выполнения оценки TOA, в том числе, пиково-вероятностный порог;
− на этапе 92 обнаруживают сигнал и оценивают распределение шумовых пиков (Noise Peak Distribution, NPD);
− на этапе 93 идентифицируют действительные пики, используя конфигурацию соотношения пики-вероятности и NPD, 93; и
− на этапе 94 определяют TOA, основываясь на действительных пиках, и сообщают сетевому узлу набор TOA.
Этап 91 дополнительно может содержать установку для пиково-вероятностного порога заданного значения, причем более высокий порог подразумевает большую или лучшую устойчивость к шумам. Пиково-вероятностный порог может быть конфигурирован в сетевом узле и сообщен UE. Сетевой узел/UE может основывать свое решение, то есть, идентификацию действительных пиков, исходя из следующего:
- Возможности исключения результатов измерений, выполненных не по линии прямой видимости (non-line of sight, NLOS), где сетевой узел с такими возможностями может быть способен исключать ошибочное измерение, вызванное обнаружением шумового пика. Это может позволить устанавливать порог с более низкой вероятностью.
- Данные развертывания ячейки, соответствующие приблизительной позиции UE, например, местоположению ячейки, когда она присоединена, когда сетевая узел может оценить приблизительное количество слышимых ячеек для UE, если количество ячеек высоко. В этом случае, сетевой узел может использовать более низкий порог, так как этот сценарий обычно обеспечивает несколько очень точных измерений по сравнению со многими плохими измерениями, которые могут быть получены при других сценариях.
На этапе 92 распределение шумовых пиков (Noise Peak Distribution, NPD) может содержать вероятность пика, вызванного шумами. NPD, например, основывается на шумовом окне, показанном на фиг. 10, где UE может оценить дисперсию (σ) амплитуд шумовых пиков, даваемую нормализованным профилем задержки профиля (Profile Delay Profile, PDP). NDP может затем быть смоделирован, используя распределение Райса с предполагаемой σ, если шумовые свойства являются круговым комплексным гауссианом. Два примера NPD показаны на фиг. 11, сначала NDP ячейки с высоким отношением сигнал/шум (Signal to noise ratio, SNR) (то есть, низкой σ), и, во-вторых, ячейки с низким SNR (высокой σ). Кроме того, NDP может быть получено, напрямую создавая кумулятивную функцию плотности (Cumulative Density Function, CDF), основанную на пиках в шумовом окне.
На этапе 93 вероятностный порог и распределение пиков могут использоваться для нахождения действительных пиков в окне поиска, показанном на фиг. 10. Например, основываясь на фиг. 10, если пик в окне поиска имеет амплитуду 0,4 для высокой σ, то фиг. 11 показывает вероятность 20%, то есть, что это шумовой пик, или, другими словами, 80% шансов, что это пик, вызванный одной из траекторий принятого сигнала. Для низкой σ вероятность, что это шумовой пик, очень низкая, или очень высока вероятность, что пик вызван одной из траекторий принятого сигнала. Эта информация позволяет, таким образом, приемнику принимать компромиссное решение между устойчивостью к обнаружению LOS и подавлением шумов.
На этапе 94, основываясь на действительных пиках, показанных на фиг. 10, UE может выбрать один из действительных пиков согласно оценке TOA, например, может быть выбран первый из действительных пиков. В другом варианте осуществления UE может выбрать два или больше действительных пиков или может выбрать другой действительный пик, основываясь на другом критерии. Затем UE сообщает TOA сетевому узлу или, как в LTE, результаты измерений разности во времени относительно опорного сигнала (Reference Signal Time Difference, RSTD). В еще одном варианте осуществления UE может сообщить в форме отчета о RSTD при многолучевом распространении, как дополнительно описано выше во вводной части этого описания, когда оно обнаруживает два или более действительных пиков на каждую ячейку. Дополнительно, UE может также сообщить вероятностную информацию об обнаруженном пике(-ах).
Приведенные ниже последовательности показывают пример влияния сигнализации в соответствии с вариантом осуществления.


На фиг. 12 показан способ 120, содержащий некоторые перегруппировки ранее описанных этапов и элементов. Способ 120 выполняется в целевом устройстве для предоставления серверу позиционирования результатов измерений разности во времени относительно опорного сигнала (Reference Signal Time Difference, RSTD) для наблюдаемой разности во времени прибытия (Observed Time Difference of Arrival, OTDOA). Способ 120 содержит этапы, на которых:
− на этапе 121 посылают серверу индикацию о возможности поддержки измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении;
− на этапе 122 принимают запрос измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении;
− на этапе 123 принимают от сервера позиционирования вспомогательные данные, обеспечивающие подробности измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении;
− на этапе 124 принимают сигнал от опорной ячейки RSTD и от соседней ячейки;
− на этапе 125 наблюдают разность во времени между принятыми сигналами, получая, таким образом, требуемые результаты измерения позиционирования по OTDOA, используя RSTD при многолучевом распространении; и
− на этапе 126 посылают серверу позиционирования затребованные результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении.
В данном способе соседняя ячейка, для которой должна наблюдаться разница во времени, может быть указана сервером позиционирования во вспомогательных данных. Вспомогательные данные могут содержать индикацию, которая инициирует поиск целевым устройством дополнительных пиков по меньшей мере в одном принятом сигнале. Сервер позиционирования может инициировать выполнение способа, основываясь на архивной информации, указывающей, что целевое устройство ранее сообщало результаты измерений, используя RSTD при многолучевом распространении. Сервер позиционирования может альтернативно инициировать выполнение способа, основываясь на архивной информации, указывающей, что целевое устройство было ранее позиционировано с низкой точностью. Целевое устройство могло быть ранее позиционировано, основываясь по меньшей мере на двух способах позиционирования, таких как глобальная система спутниковой навигации (Global Navigation Satellite System, GNSS) и OTDOA RSTD. Этап 125 наблюдения может дополнительно содержать использование пиково-вероятностного порога с заданным значением, чтобы оценить результаты измерения позиционирования по OTDOA, используя RSTD при многолучевом распространении, где более высокий порог обеспечивает лучшую устойчивость к шумам. Целевое устройство может быть выполнено с возможностью исключения результатов измерений позиционирования по OTDOA на линии отсутствия прямой видимости (non-line of sight, NLOS), позволяя, таким образом, устанавливать более низкий пиково-вероятностный порог. Пиково-вероятностный порог может быть конфигурирован сервером позиционирования и может быть предоставлен целевому устройству. Пиково-вероятностный порог может быть основан на данных развертывания ячейки и сетевом алгоритме позиционирования, а результаты измерения позиционирования по OTDOA, используя RSTD при многолучевом распространении, могут быть основаны на идентифицированных действительных пиках сигналов от опорной и соседней ячеек, причем действительный пик может быть пиком, превышающим пиково-вероятностный порог, а результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении, могут быть определены как первые из действительных пиков, полученных от опорной и соседней ячеек.
На фиг. 13 показан способ 130, содержащий некоторые перегруппировки ранее описанных этапов и элементов. Способ 130 выполняется в сервере позиционирования для приема от целевого устройства результатов измерений обеспечения разности во времени относительно опорного сигнала (RSTD) для наблюдаемой разности по времени прибытия (OTDOA). Способ 130 содержит этапы, на которых:
− на этапе 131 принимают от целевого устройства индикацию о возможности поддержки измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении;
− на этапе 132 посылают целевому устройству запрос измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении;
− на этапе 133 посылают целевому устройству вспомогательные данные, предоставляющие подробности затребованных измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении; и
− на этапе 134 принимают от целевого устройства затребованные результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении.
Сервер позиционирования может указать во вспомогательных данных соседнюю ячейку, для которой разность во времени должна наблюдаться целевым устройством. Сервер позиционирования может инициировать целевое устройство для поиска дополнительных пиков по меньшей мере в одном принятом сигнале посредством индикации во вспомогательных данных. Сервер позиционирования может инициировать выполнение способа, основываясь на архивной информации, указывающей, что целевое устройство ранее сообщало результаты измерений, используя RSTD при многолучевом распространении. Сервер позиционирования может альтернативно инициировать выполнение способа, основываясь на архивной информации, указывающей, что целевое устройство было ранее позиционировано с малой точностью. Целевое устройство могло быть ранее позиционировано, основываясь меньшей мере на двух способах позиционирования, таких как глобальная система спутниковой навигации (Global Navigation Satellite System, GNSS) и OTDOA RSTD. Сервер позиционирования может обеспечивать пиково-вероятностный порог с данным значением для целевого устройства, чтобы оценить результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении, где более высокий порог обеспечивает лучшую устойчивость для шумов. Пиково-вероятностный порог может быть основан на данных развертывания ячейки и сетевом алгоритме позиционирования, результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении, могут быть основаны на идентифицированных действительных пиках сигналов от опорной и соседних ячеек, причем действительный пик может быть пиком, превышающим пиково-вероятностного порог, а результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении, могут быть определены как первые из действительных пиков.
Обеспечивается устройство/сетевой узел, содержащий схему обработки и память, причем память содержит команды, исполняемые схемой обработки, за счет чего устройство действует так, чтобы выполнять способы, связанные с вариантами осуществления устройства/сетевого узла; это дополнительно описывается ниже более подробно.
Обеспечивается беспроводное устройство (wireless device, WD) или оборудование пользователя (User Equipment, UE), содержащие схему обработки и память, причем память содержит команды, исполняемые схемой обработки, за счет чего WD или UE действует так, чтобы выполнять способы, связанные с вариантами осуществления WD/UE; это описывается ниже дополнительно более подробно.
Также обеспечиваются компьютерные программы и считываемый компьютером носитель, выполненные с возможностью хранения команд для исполнения этапов в соответствии с вариантами осуществления раскрытых здесь способов.
Некоторые варианты осуществления могут обеспечивать одно или более нижеследующих технических преимуществ.
Преимущества содержат лучшее и/или более эффективное позиционирование за счет нижеследующего:
- улучшенная конфигурируемость, поскольку сетевой узел может быть выполнен с возможностью конфигурации пиково-вероятностного порога, основываясь на данных сетевого развертывания, сложности алгоритма позиционирования и т. д.;
- компонент приемника может планировать, когда пытаться обнаруживать дополнительные трассы, или не пытаться их обнаруживать.
Следует заметить, что любой признак любого из вариантов осуществления, раскрытых здесь, может быть применен к любому другому варианту осуществления повсюду, где он применим. Аналогично, любое преимущество любого из вариантов осуществления может примениться к другим вариантам осуществления и наоборот. Определенные варианты осуществления могут иметь некоторые или ни одного из вышеупомянутых преимуществ. Другие преимущества будут очевидны для специалистов в данной области техники. Другие задачи, признаки и преимущества содержащихся здесь вариантов осуществления станут очевидны из последующего описания.
Хотя описанные выше решения могут быть реализованы в любом соответствующем типе системы, используя любые подходящие компоненты, конкретные варианты осуществления описанных решений могут быть реализованы в сети беспроводной связи, такой как, например, сеть радиосвязи, показанная на фиг. 14a. В примере на фиг. 14a сеть беспроводной связи обеспечивает связь и другие типы услуг для одного или более беспроводных устройств. Сеть беспроводной связи содержит один или более сетевых узлов, которые облегчают доступ и/или использование беспроводных устройств или услуг, предоставляемых сетью беспроводной связи. Сеть беспроводной связи может дополнительно содержать любые вспомогательные элементы, пригодные для поддержки связи между беспроводными устройствами или между беспроводным устройством и другим устройством связи, таким как телефон проводной линии связи.
Сеть 1410 может содержать одну или более IP-сетей, телефонных сетей общего пользования (public switched telephone network, PSTN), сети пакетной передачи данных, оптические сети, глобальные сети (wide area network, WAN), локальные сети (local area network, LAN), беспроводные локальные сети (wireless local area network, WLAN), проводные сети, беспроводные сети, городские компьютерные сети и другие сети, чтобы осуществлять связь между устройствами.
Сеть беспроводной связи может представлять любой тип связи, телекоммуникаций, передачи данных, сотовой связи и/или радиосети или другой тип системы. В конкретных вариантах осуществления сеть беспроводной связи может быть выполнена с возможностью действия согласно определенным стандартам или другим типам заранее определенных правил или процедур. Таким образом, конкретные варианты осуществления сети беспроводной связи могут реализовать стандарты связи, такие как Global System for Mobile Communications (GSM), Universal Mobile Telecommunications System (UMTS), Long Term Evolution (LTE) и/или другие соответствующие стандарты 2G, 3G, 4G, 5G или NR; стандарты беспроводной локальной сети (WLAN), такие как стандарты IEEE 802.11; и/или любой другой соответствующий стандарт беспроводной связи, такие как стандарты Worldwide Interoperability for Microwave Access (WiMax), Bluetooth и/или ZigBee.
На фиг. 14a представлена сеть беспроводной связи, содержащая сетевой узел 1440 и беспроводное устройство (WD) 140 в соответствии с конкретным вариантом осуществления. Для простоты, на фиг. 14a показана только сеть 1410, сетевые узлы 1440 и 1420 и WD 140. Сетевой узел 1440 содержит процессор 1442, запоминающее устройство 1443, интерфейс 1441 и антенну 1430. Точно также, WD 140 содержит процессор 142, запоминающее устройство 145, интерфейс 143 и антенну 147. Эти компоненты могут действовать вместе, чтобы обеспечивать функциональные возможности сетевого узла и/или беспроводного устройства, такие как обеспечение беспроводных соединений в сети беспроводной связи. В различных вариантах осуществления сеть беспроводной связи может содержать любое количество проводных или беспроводных сетей, сетевых узлов, таких как сервер позиционирования, описанный ранее, базовые станции, контроллеры, беспроводные устройства, ретрансляционные станции и/или любые другие компоненты, которые могут облегчать или принимать участие в передаче данных и/или сигналов, независимо от того, через проводные или беспроводные соединения.
Термин "сетевой узел", как он используется здесь, относится к оборудованию, способному, выполненному с возможностью, расположенному и/или способному действовать с возможностью осуществления прямо или косвенно связи с беспроводным устройством и/или другим оборудованием в сети беспроводной связи, которое позволяет и/или обеспечивает беспроводной доступ к беспроводному устройству. Примерами сетевых узлов являются, не создавая ограничений, точки доступа (access point, AP) в конкретных точках радиодоступа. Сетевой узел может представлять собой базовые станции (base station, BS), такие как базовые радиостанции. Конкретные примеры базовых радиостанций содержат Node B и развитые Node B (eNB). Базовые станции могут быть поделены на категории, основываясь на объеме покрытия, который они предоставляют (или, говоря иначе, на их уровне мощности передачи), и могут тогда также упоминаться как фемто-базовые станции, пико-базовые станции, микро-базовые станции или макро-базовые станции. Термин "сетевой узел" также содержит одну или более (или все) части распределенной базовой радиостанции, такие как централизованные цифровые блоки и/или удаленные радиоблоки (remote radio unit, RRU), иногда называемые удаленными радиоголовками (Remote Radio Head, RRH). Такие удаленные радиоблоки могут или не могут быть интегрированы с антенной в виде радиостанции с интегрированной антенной. Части распределенных базовых радиостанций могут также упоминаться как узлы в распределенной антенной системе (distributed antenna system, DAS).
Термин "сетевой узел" содержит узлы, располагающиеся снаружи, а также внутри зданий или строений. В некоторых случаях, строения могут вызвать ухудшение сигналов или даже частично или полностью блокировать распространение сигнала.
В качестве конкретного примера, не создающего ограничений, базовая станция может быть релейным узлом или релейным передающим узлом, управляющим релейной связью.
Другие дополнительные примеры сетевых узлов содержат радиооборудование мультистандартной радиосвязи (multi-standard radio, MSR), такое как MSR BS, сетевые контроллеры, такие как контроллеры радиосети (radio network controller, RNC) или контроллеры базовой станции (base station controller, BSC), базовые приемопередающие станции (base transceiver station, BTS), точки передачи, передающие узлы, объекты мультиячеечной/мультиадресной координации (MCE), узлы базовой сети (например, MSC, MME), узлы O&M, узлы OSS, узлы SON, узлы позиционирования (например, Е-SMLC) и/или MDT. В более общем плане, однако, сетевые узлы могут представлять собой любое соответствующее устройство (или группу устройств) способных, выполненных с возможностью, организованных и/или могущих действовать с возможностью разрешения и/или предоставления доступа беспроводного устройства к сети беспроводной связи или предоставления некоторой услуги беспроводному устройству, которое получило доступ к сети беспроводной связи. Соответственно, в представленном случае, сетевой узел может представлять сервер позиционирования.
Термин "радиоузел", как он используется здесь, применяется, главным образом, как относящийся к беспроводным устройствам и к сетевым узлам, как каждый из них соответственно описывается выше.
На фиг. 14a сетевой узел 1440 содержит процессор 1442, запоминающее устройство 1443, интерфейс 1441 и антенну 1430. Эти компоненты показаны в виде одиночных блоков, расположенных внутри единого большого блока. На практике, однако, сетевой узел может содержать многочисленные различные физические компоненты, образующие единый показанный компонент (например, интерфейс 1441 может содержать терминалы для соединения проводов при проводных соединениях и радиоприемопередатчик для беспроводного соединения). В качестве другого примера, сетевой узел 1440 может быть виртуальным сетевым узлом, в котором многочисленные различные физически разделенные компоненты взаимодействуют, чтобы обеспечить функциональные возможности сетевого узла 1440 (например, процессор 1442 может содержать три отдельных процессора, расположенных в трех отдельных корпусах, где каждый процессор ответственен за свою функцию для конкретного сетевого узла 1440). Аналогично, сетевой узел 1440 может быть образован из многочисленных физически разделенных компонент (например, компонент NodeB и компонент RNC, компонент BTS и компонент BSC, и т. д.), каждый из которых может иметь свои собственные компоненты соответствующего процессора, запоминающего устройства и интерфейса. В некоторых сценариях, в которых сетевой узел 1440 содержит многочисленные отдельные компоненты (например, BTS и компоненты BSC), один или более отдельных компонентов могут использован среди нескольких сетевых узлов. Например, один RNC может управлять многочисленными NodeB. В таком сценарии каждая отдельная пара NodeB и BSC может быть отдельным сетевым узлом. В некоторых вариантах осуществления сетевой узел 1440 может быть выполнен с возможностью поддержки многочисленных технологий радиодоступа (radio access technologyy, RAT). В таких вариантах осуществления некоторые компоненты могут дублироваться (например, отдельное запоминающее устройство 1443 для разных RAT), и некоторые компоненты могут использоваться повторно (например, одна и та же антенна 1430 может совместно использоваться несколькими RAT).
Процессор 1442 может быть сочетанием одного или более микропроцессоров, контроллеров, микроконтроллеров, центрального процессора, цифрового сигнального процессора, специализированных интегральных схем, программируемых логических интегральных схем или любого другого соответствующего компьютерного устройства, ресурса или сочетания аппаратных средств, программного обеспечения и/или кодированной логики, выполненных с возможностью обеспечения, автономно или совместно с другими компонентами сетевого узла 1440, такими как запоминающее устройство 1443, функциональных возможностей сетевого узла 1440. Например, процессор 1442 может исполнять команды, хранящиеся в запоминающем устройстве 1443. Такие функциональные возможности могут содержать обеспечение различных беспроводных признаков, обсуждаемых здесь, для беспроводного устройства, такого как WD 140, в том числе любые из раскрытых здесь признаков или преимуществ.
Запоминающее устройство 1443 может содержать любую форму энергозависимой или энергонезависимой считываемой компьютером памяти, в том числе, без ограничения, персистентное запоминающее устройство, твердотельную память, удаленно установленную память, магнитные носители, оптические носители, оперативную память (RAM), постоянное запоминающее устройство (ROM), съемные носители или любой другой подходящий локальный или удаленный компонент памяти. Запоминающее устройство 1443 может хранить любые соответствующие команды, данные или информацию, в том числе, программное обеспечение и кодированную логику, используемые сетевым узлом 1440. Запоминающее устройство 1443 может использоваться для хранения любых результатов вычислений, сделанных процессором 1442, и/или любых данных, полученных через интерфейс 1441.
Сетевой узел 1440 также содержит интерфейс 1441, который может использоваться при проводной или беспроводной связи для сигнализации и/или передачи данных между сетевым узлом 1440, сетью 1410 и/или WD 140. Например, интерфейс 1441 может выполнять любое форматирование, кодирование или преобразование, которое может быть необходимо, чтобы позволить сетевому узлу 1440 посылать и принимать данные от сети 1410 через проводное соединение. Интерфейс 1441 может также содержать радиопередатчик и/или приемник, который может быть связан с антенной или быть частью антенны 1430. Радиоустройство может принимать цифровые данные, которые должны посылаться на другие сетевые узлы или WD через беспроводное соединение. Радиоустройство может преобразовывать цифровые данные в радиосигнал, имеющий соответствующий канал и параметры полосы пропускания. Радиосигнал может затем передаваться через антенну 1430 соответствующему получателю (например, WD 140).
Антенна 1430 может быть антенной любого типа, способной к передаче и приему данных и/или сигналов с помощью беспроводных технологий. В некоторых вариантах осуществления антенна 1430 может содержать одну или более всенаправленных, секторных или панельных антенн, выполненных с возможностью передачи/приема радиосигналов в диапазоне, например, между 2 ГГц и 66 ГГц. Всенаправленная антенна может использоваться для передачи/приема радиосигналов в любом направлении, секторная антенна может использоваться для передачи/приема радиосигналов от устройств внутри определенной области и панельная антенна может быть антенной прямой видимости, используемой для переда/приема радиосигналов по относительно прямой линии.
Сетевой узел 1440 может выполнять описанные здесь этапы или функции в отношении некоторых вариантов осуществления.
По существу, сетевой узел может посредством сервера позиционирования, способного принимать результаты измерений разности во времени относительно опорного сигнала (Reference Signal Time Difference, RSTD) для наблюдаемой разности во времени прибытия (Observed Time Difference of Arrival, OTDOA) от целевого беспроводного устройства, сервера позиционирования, содержащего схему обработки и память, причем память содержит команды, исполняемые схемой обработки, посредством которых сервер позиционирования может действовать, чтобы:
− принимать от беспроводного устройства индикацию о возможности поддержки результатов измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении;
− посылать беспроводному устройству запрос на измерения позиционирования по OTDOA, используя RSTD при многолучевом распространении;
− посылать беспроводному устройству вспомогательные данные, обеспечивающие подробности требуемых измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении; и
− принимать от беспроводного устройства затребованные результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении.
Сервер позиционирования может указать во вспомогательных данных соседнюю ячейку, для которой разница во времени должна наблюдаться целевым устройством. Сервер позиционирования может инициировать целевое устройство на поиск дополнительных пиков по меньшей мере в одном принятом сигнале посредством индикации во вспомогательных данных. Сервер позиционирования может инициировать выполнение способа, основываясь на архивной информации, указывающей, что целевое устройство ранее сообщало о результатах измерениях, используя RSTD при многолучевом распространении. Сервер позиционирования может альтернативно инициировать выполнение способа, основываясь на архивной информации, указывающей, что целевое устройство ранее было позиционировано с низкой точностью. Целевое устройство могло быть ранее позиционировано, основываясь по меньшей мере на двух способах позиционирования, таких как глобальная система спутниковой навигации (GNSS) и OTDOA RSTD. Сервер позиционирования может обеспечить пиково-вероятностный порог с заданным значением для целевого устройства, чтобы оценить результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении, где более высокий порог обеспечивает лучшую устойчивость к шумам. Пиково-вероятностный порог может быть основан на данных развертывания ячейки и сетевом алгоритме позиционирования, результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении, могут быть основаны на идентифицированных действительных пиках сигналов от опорной и соседней ячеек, действительный пик может быть пиком, превышающим пиково-вероятностный порог, и результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении, могут быть определены как первые из действительных пиков.
Термин "беспроводное устройство" (WD), как он используется здесь, относится к устройству, способному, выполненному с возможностью, расположенному и/или пригодному действовать с возможностью осуществления связи с помощью беспроводных технологий с сетевыми узлами и/или другим беспроводным устройством. В этом раскрытии беспроводное устройство иногда альтернативно называют целевым устройством. Осуществление связи с помощью беспроводных технологий может содержать передачу и/или прием беспроводных сигналов, используя электромагнитные сигналы, радиоволны, инфракрасные сигналы и/или другие типы сигналов, пригодные для передачи информации через эфир. В конкретных вариантах осуществления беспроводные устройства могут быть выполнены с возможностью передачи и/или приема информации без прямого человеческого взаимодействия. Например, беспроводное устройство может быть разработано так, чтобы передавать информацию в сеть согласно заранее разработанному графику, когда инициируется внутренним или внешним событием или в ответ на запросы от сети. В целом, беспроводное устройство может представлять любое устройство, способное, выполненное с возможностью, организованное и/или пригодное действовать для беспроводной связи, например, для устройства радиосвязи. Примеры беспроводных устройств содержат, не ограничиваясь только этим, оборудование пользователя (UE), такое как смартфоны. Дополнительные примеры содержат беспроводные камеры, планшетные компьютеры, поддерживающие беспроводную связь, встроенное в ноутбук оборудование (laptop-embedded equipment, LEE), вмонтированное в ноутбук оборудование (laptop-mounted equipment, LME), защитные USB-заглушки и/или беспроводное оборудование для помещений пользователя (customer-premises equipment, CPE).
В качестве конкретного примера, беспроводное устройство может представлять UE, выполненное с возможностью осуществления связи в соответствии с одним или более стандартами связи, опубликованными по Проекту партнерства третьего поколения (3GPP), такими как стандарты 3GPP GSM, UMTS, LTE и/или 5G. Термин "оборудование пользователя" или "UE", как он используется здесь, может не обязательно означать "пользователя" в смысле пользователя-человека, который владеет и/или управляет соответствующим устройством. Вместо этого, UE может представлять устройство, предназначенное для продажи или управления пользователем-человеком, но которое первоначально может быть не связано с конкретным пользователем-человеком.
Беспроводное устройство может поддерживать связь типа "устройство-устройство" (device-to-device, D2D), например, реализуя стандарт 3GPP связи по побочным каналам, и может в этом случае упоминаться как устройство связи D2D.
В еще одном другом конкретном примере, в сценарии Интернета вещей (Internet of Things, IoT), беспроводное устройство может представлять машину или другое устройство, выполняющее контроль и/или измерения и передачу результатов такого контроля и/или измерений другому беспроводному устройству и/или сетевому узлу. Беспроводное устройство может в этом случае быть устройством типа "машина-машина" (machine-to-machine, M2M), которое может в контексте 3GPP упоминаться как устройство связи машинного типа (machine-type communication, MTC). В качестве конкретного примера, беспроводное устройство может быть UE, реализующим стандарт 3GPP узкополосного Интернета вещей (narrow band internet of things, NB-IoT). Конкретными примерами таких машин или устройств являются датчики, измерительные устройства, такие как измерители мощности, промышленное обрабатывающее оборудование или бытовые или персональные устройства, например, холодильники, телевизоры, персональные носимые предметы, такие как часы, и т. д. В других сценариях беспроводное устройство может представлять транспортное средство или другое оборудование, способное контролировать и/или сообщать о его рабочем состоянии или других функциях, связанных с его работой.
Беспроводное устройство, как описано выше, может представлять конечную точку беспроводного соединения, в которой устройство может упоминаться как беспроводной терминал. Кроме того, беспроводное устройство, как оно описано выше, может быть мобильным устройством, и в этом случае оно может также упоминаться как мобильное устройство или мобильный терминал.
Как показано на фиг. 14a, WD 140 может быть любым типом беспроводной конечной точки, мобильной станцией, мобильным телефоном, беспроводным телефоном местного абонентского канала, смартфоном, оборудованием пользователя, настольным компьютером, PDA, сотовым телефоном, планшетом, ноутбуком, телефоном VoIP или мобильной трубкой, транспортным средством или другим устройством, способным с помощью беспроводных технологий посылать и принимать данные и/или сигналы сетевому узлу и от него, таким как сетевой узел 1440 и/или другие WD. WD 140 содержит процессор 142, запоминающее устройство 145, интерфейс 143 и антенну 147. Аналогично сетевому узлу 1440, компоненты WD 140 изображаются как одиночные прямоугольники, расположенные внутри единого большего прямоугольника, однако, на практике беспроводное устройство может содержать многочисленные различные физические компоненты, образующие единый показываемый компонент (например, запоминающее устройство 145 может содержать многочисленные дискретные микросхемы, причем каждая микросхема представляет часть общей емкости запоминающего устройства).
Процессор 142 может быть сочетанием одного или более микропроцессоров, контроллера, микроконтроллера, центрального процессора, цифрового сигнального процессора, специализированных интегральных схем, программируемых логических интегральных схем или любого другого соответствующего компьютерного устройства, ресурса или сочетания аппаратных средств, программного обеспечения и/или кодированной логики, выполненных с возможностью обеспечения, автономно или в сочетании с другими WD 140, компонентов, таких как запоминающее устройство 145, или функциональных возможностей WD 140. Такие функциональные возможности могут содержать обеспечение различных беспроводных признаков, обсуждавшихся здесь, в том числе, любого из раскрытых здесь признаков или преимуществ.
Запоминающее устройство 145 может иметь любую форму энергозависимой или энергонезависимой считываемой компьютером памяти, в том числе, без ограничения, быть персистентным запоминающим устройством, твердотельной памятью, удаленно установленной памятью, магнитным носителем, оптическим носителем, оперативной памятью (RAM), постоянным запоминающим устройством (ROM), съемным носителем или любым другим подходящим локальным или удаленным компонентом памяти. Запоминающее устройство 1443 может хранить любые соответствующие данные, команды или информацию, в том числе, программное обеспечение и кодированную логику, используемые WD 140. Запоминающее устройство 145 может использоваться для хранения любых результатов вычислений, проделанных процессором 142, и/или любых данных, полученных через интерфейс 143.
Запоминающее устройство 145 может содержать считаемый компьютером носитель, на котором может храниться компьютерная программа. Компьютерная программа может содержать команды, заставляющие процессор 142 (и любые оперативно связанные с ним компоненты и устройства, такие как интерфейс 143 и запоминающее устройство 145) выполнять способы, соответствующие описанным здесь вариантам осуществления. Компьютерная программа и/или компьютерный программный продукт может, таким образом, обеспечивать средство для выполнения любых раскрытых здесь этапов.
Беспроводное устройство 140 может выполнять этапы или функции, описанные здесь в отношении некоторых вариантов осуществления.
Интерфейс 143 может использоваться при беспроводной передаче сигнализации и/или данных между WD 140 и сетевым узлом 1440. Например, интерфейс 143 может выполнять любое форматирование, кодирование или преобразование, которое может быть необходимо, чтобы позволить WD 140 посылать и принимать данные от сетевого узла 1440 по беспроводному соединению. Интерфейс 143 может также содержать радиопередатчик и/или приемник, которые могут быть связаны с частью антенны 147. Радиоустройство может принимать цифровые данные, которые должны посылаться сетевому узлу 1440 через беспроводное соединение. Радиоустройство может преобразовывать цифровые данные в радиосигнал, имеющий соответствующий канал и параметры полосы пропускания. Радиосигнал может затем передаваться через антенну 147 сетевому узлу 1440.
Антенна 147 может быть любым типом антенны, способным передавать и принимать данные и/или сигналы с помощью беспроводных технологий. В некоторых вариантах осуществления антенна 147 может содержать одну или более всенаправленных, секторных или панельных антенн, выполненных с возможностью передачи/приема радиосигналов в диапазоне между 2 ГГц и 66 ГГц. Для простоты антенна 147 может считаться частью интерфейса 143 в том смысле, что она использует беспроводной сигнал.
Беспроводное устройство 140, как оно описано выше, выполнено с возможностью обеспечения измерений разности во времени относительно опорного сигнала (Reference Signal Time Difference, RSTD) для наблюдаемой разности во времени прибытия (Observed Time Difference of Arrival, OTDOA) к серверу позиционирования, причем беспроводное устройство содержит схему обработки и память, где память содержит команды, исполняемый схемой обработки, за счет чего беспроводное устройство способно выполнять этапы, на которых:
− посылают серверу позиционирования индикацию о возможности поддержки измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении;
− принимают от сервера позиционирования запрос измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении;
− принимают от сервера позиционирования вспомогательные данные, обеспечивающие подробности требуемых измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении;
− принимают сигнал от опорной ячейки RSTD и от соседней ячейки;
− наблюдают разность во времени между принятыми сигналами, получая, таким образом, требуемые результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении; и
− посылают серверу позиционирования затребованные результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении.
Соседняя ячейка, для которой должна наблюдаться разность во времени, может быть указана сервером позиционирования в вспомогательных данных. Вспомогательные данные могут содержать индикацию, которая инициирует беспроводное устройство искать дополнительные пики по меньшей мере в одном принятом сигнале. Выполнение способа может быть инициировано сервером позиционирования, основываясь на архивной информации, указывающей, что беспроводное устройство ранее сообщало результаты измерений, используя RSTD при многолучевом распространении. Выполнение способа альтернативно может быть инициировано сервером позиционирования, основываясь на архивной информации, указывающей, что беспроводное устройство было ранее позиционировано с низкой точностью. Беспроводное устройство могло ранее быть позиционировано, основываясь по меньшей мере на двух способах позиционирования, таких как глобальная система спутниковой навигации (GNSS) и OTDOA RSTD. Беспроводное устройство может дополнительно быть выполнено с возможностью наблюдения разности во времени, используя пиково-вероятностный порог с заданным значением, чтобы оценить результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении, где более высокий порог обеспечивает боле высокую устойчивость к шумам. Беспроводное устройство может дополнительно быть выполнено с возможностью исключения результатов измерений позиционирования не по линии прямой видимости (non-line of sight, NLOS) OTDOA, позволяя, таким образом, установить более низкий пиково-вероятностный порог. Пиково- вероятностный порог может быть конфигурирован сервером позиционирования и может быть предоставлен беспроводному устройству. Пиково-вероятностный порог может также быть основан на данных развертывания ячейки и сетевом алгоритме позиционирования сети, причем измерения позиционирования по OTDOA, используя RSTD при многолучевом распространении, могут быть основаны на идентифицированных действительных пиках сигналов от опорной и соседних ячеек и действительный пик может быть пиком, превышающим пиково-вероятностный порог, а результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении, могут быть определены как первые из действительных пиков от опорной и соседней ячеек.
Беспроводная сеть, показанная на фиг. 14a, может содержать множество беспроводных устройств 140 и множество узлов 1420, 1440 радиодоступа, соединенных с одним или более базовыми сетевыми узлами (не показаны) через сеть 1410. Каждое из беспроводных устройств 140 внутри области покрытия может быть способно осуществлять связь напрямую с узлами 1420, 1440 радиодоступа через беспроводной интерфейс. В некоторых вариантах осуществления беспроводные устройства могут также быть способны осуществлять связь друг с другом через связь типа "устройство-устройство" (D2D). В некоторых вариантах осуществления узлы 1420, 1440 радиодоступа могут также быть способны осуществлять связь друг с другом, например, через интерфейс (например, интерфейс X2 в системе LTE).
В некоторых вариантах осуществления область покрытия беспроводным сигналом, связанная с узлом 1420, 1440 радиодоступа может упоминаться как ячейка. Беспроводное устройство 140 может быть выполнено с возможностью действия при агрегации несущих (CA), предполагая агрегацию двух или более несущих по меньшей мере в одном из направлений, DL или UL. При наличии CA беспроводное устройство 140 может иметь многочисленные сервисные ячейки, причем термин "сервисная" здесь означает, что беспроводное устройство 140 конфигурировано с помощью соответствующей сервисной ячейки и может принимать и/или передавать данные сетевому узлу на сервисной ячейке, например, на PCell или на любой из SCell. Данные передаются или принимаются через физические каналы, например, PDSCH на DL, PUSCH на UL и т. д. Компонентная несущая (CC) также взаимозаменяемо называется как несущая или агрегированная несущая, PCC или SCC конфигурируется в беспроводном устройстве 140 посредством сетевого узла 1440, используя сигнализацию более высокого уровня, например, посылая сообщение конфигурации RRC беспроводному устройству 140. Конфигурированная CC используется сетевым узлом 1440 для обслуживания беспроводного устройства 140 на сервисной ячейке (например, на PCell, PSCell, SCell и т. д.), конфигурированной CC. Конфигурированная CC также используется беспроводным устройством 140 для выполнения одного или более радиоизмерений (например, RSRP, RSRQ и т. д.) на ячейках, работающих на CC, например, PCell, SCell или PSCell и соседних ячейках.
Термин SRS, используемый здесь, может относиться к любому типу опорного сигнала (RS) или, более широко, к физическим радиосигналам, передаваемым беспроводным устройством 140 по UL, чтобы позволить сетевому узлу 1440 определить качество сигнала по UL, например, SNR для UL, SINR и т. д. Примерами таких опорных сигналов являются звуковые опорные сигналы, DMRS, конкретные опорные сигналы беспроводных устройств или пилот-сигналы и т. д. Варианты осуществления могут применяться к любому типу RS, то есть, к переключению несущей, передающей любой тип RS.
В некоторых вариантах осуществления узлы 1420, 1440 радиодоступа могут взаимодействовать с контроллером радиосети. Контроллер радиосети может управлять узлами 1420, 1440 радиодоступа и может обеспечивать определенные функции управления радиоресурсом, функции управления мобильностью и/или другие подходящие функции. В некоторых вариантах осуществления функции контроллера радиосети могут содержаться в узле 1420, 1440 радиодоступа. Контроллер радиосети может взаимодействовать с базовым сетевым узлом (не показан). В некоторых вариантах осуществления контроллер радиосети может взаимодействовать с узлом базовой сети через взаимосвязанную сеть 1410.
Взаимосвязанная сеть 1410 может относиться к любой взаимосвязанной системе, способной к передаче аудиосигналов, видеосигналов, сигналов, данных, сообщений или любого сочетания перечисленного. Взаимосвязанная сеть 1410 может содержать всю или часть телефонной сети общего пользования (PSTN), публичную или частную сеть передачи данных, локальную сеть (LAN), городскую компьютерную сеть (MAN), глобальную сеть (WAN), локальную, региональную или глобальную сеть связи или компьютерную сеть, такую как Интернет, проводную или беспроводную сеть, внутреннюю сеть предприятия или любую другую соответствующую линию связи, в том числе, их сочетания.
В некоторых вариантах осуществления узел базовой сети может управлять установлением сеансов связи и различными другими функциональными возможностями для беспроводных устройств 147. Примерами узла базовой сети могут являться MSC, ММЕ, SGW, PGW, O&M, OSS, SON, узел позиционирования (например, Е-SMLC), узел MDT и т. д. Беспроводные устройства 140 могут обмениваться определенными сигналами с узлом базовой сети, используя уровень слоя недоступа. При сигнализации на уровне слоя недоступа сигналы между беспроводными устройствами 140 и узлом базовой сети могут прозрачно проходить через сеть радиодоступа. В некоторых вариантах осуществления узел 1420, 1440 радиодоступа может взаимодействовать с одним или более сетевыми узлами через межузловой интерфейс.
Варианты осуществления могут быть реализованы в любом соответствующем типе системы связи, поддерживающей любые подходящие стандарты связи и использующей любые подходящие компоненты, и могут применяться к любой технологии радиодоступа (RAT) или системам мульти-RAT, в которых беспроводное устройство принимает и/или передает сигналы (например, данные). Хотя некоторые варианты осуществления описываются для системе NR, 5G, 4G и/или LTE, варианты осуществления могут быть применимыми к любой RAT, такой как UTRA, Е-UTRA узкополосный Интернет вещей (NB-IoT), WiFi, Bluetooth, RAT следующего поколения (NR, NX), 4G, 5G, LTE FDD/TDD, WCDMA/HSPA, GSM/GERAN, WLAN, CDMA2000 и т. д.
Обращаясь к фиг. 14b, беспроводное устройство 140 может быть оборудованием пользователя. Беспроводное устройство 140 содержит антенну 147, схему 148 входных радиоустройств, схему 142 обработки и считываемый компьютером носитель 145. Антенна 147 может содержать одну или более антенн или антенных решеток и соединяется со схемой 148 входных радиоустройств. В некоторых альтернативных вариантах осуществления беспроводное устройство 140 может не содержать антенну 147 и антенна 147 может вместо этого быть отдельной от беспроводного устройства 140 и присоединяться к беспроводному устройству 140 через интерфейс или порт.
Схема 148 входных радиоустройств может содержать различные фильтры и усилители, соединенные с антенной 147 и схемой 142 обработки, и быть выполнена с возможностью формирования сигналов, передаваемых между антенной 147 и схемой 142 обработки. В некоторых альтернативных вариантах осуществления беспроводное устройство 140 может не содержать схему 148 входных радиоустройств и схема 142 обработки может вместо этого быть соединена с антенной 147 без схемы 148 входных радиоустройств.
Схема 142 обработки может содержать одну или более схем радиочастотных (RF) приемопередатчиков, схему обработки в основной полосе и схему прикладной обработки. В некоторых вариантах осуществления схема радиочастотного приемопередатчика, схема обработки в основной полосе и схема прикладной обработки могут располагаться на отдельных интегральных микросхемах. В альтернативных вариантах осуществления часть или вся схема обработки в основной полосе и схема прикладной обработки могут быть объединены в одной интегральной микросхеме, а схема радиочастотного приемопередатчика может находиться на отдельной интегральной микросхеме. В других альтернативных переменных вариантах осуществления часть или вся схема радиочастотного приемопередатчика и схема обработки в основной полосе могут быть на одной интегральной схеме, а схема прикладной обработки может располагаться на отдельной интегральной микросхеме. В других альтернативных вариантах осуществления часть или вся схема радиочастотного приемопередатчика, схема обработки в основной полосе и схема прикладной обработки могут быть объединены в одной интегральной микросхеме. Схема 142 обработки может содержать, например, один или более центральных процессоров (CPU), один или более микропроцессоров, одна или более специализированных интегральных схем (ASIC) и/или одну или более программируемых логических интегральных микросхем (FPGA).
В конкретных вариантах осуществления некоторые или все функциональные возможности, описанные здесь как обеспечиваемые беспроводным устройством, могут обеспечиваться схемой 142 обработки, выполняющей команды, хранящиеся на считываемом компьютером носителе 145. В альтернативных вариантах осуществления некоторые или все функциональные особенности могут обеспечиваться схемой 142 обработки, не выполняя команд, хранящихся на считываемом компьютером носителе, то есть, зашитым способом. В любом из этих конкретных вариантов осуществления, независимо от того, выполняются ли команды, хранящиеся на считываемом компьютером носителе, или нет, схема обработки может быть упомянута как выполненная с возможностью осуществления описанных функциональных особенностей. Преимущества, обеспечиваемые такими функциональными особенностями, не ограничиваются одной только схемой 142 обработки или другими компонентами беспроводного устройства 140, а используются беспроводным устройством в целом и/или конечными пользователями и, в целом, беспроводной сетью.
Антенна 147, схема 148 входных радиоустройств и/или схема 142 обработки могут быть выполнены с возможностью осуществления любых операций приема, описанных здесь как выполняемых беспроводным устройством. Любая информация, данные и/или сигналы могут быть получены от сетевого узла и/или другого беспроводного устройства.
Электрическая схема 142 обработки может быть выполнена с возможностью осуществления любых операций, описанных здесь как выполняемые беспроводным устройством. Операции, выполняемые схемой 142 обработки могут содержать информацию для обработки, полученную схемой 142 обработки, например, для преобразования полученной информации в другую информацию, сравнения полученной информации или преобразованной информации с информацией, хранящейся в беспроводном устройстве, и/или выполнения одной или более операций, основываясь на полученной информации или преобразованной информации, и, как результат, выполнение определения посредством упомянутой обработки.
Антенна 147, схема 148 входных радиоустройств, и/или схема 142 обработки могут быть выполнены с возможностью осуществления любых передающих операций, описанных здесь как выполняемые беспроводным устройством. Любая информация, данные и/или сигналы могут быть переданы сетевому узлу и/или другому беспроводному устройству.
Считываемый компьютером носитель 145 обычно выполнен с возможностью хранения команд, таких как компьютерная программа, программное обеспечение, приложение, содержащие одну или более логик, правил, кодов, таблиц и т. д. и/или других команд, пригодных для выполнения процессором. Примеры считаемого компьютером носителя 145 содержат компьютерную память (например, оперативную память (Random Access Memory, RAM) или постоянную память (Read Only Memory, ROM)), носители запоминающего устройства большой емкости (например, жесткий диск), съемные носители (например, компакт-диск (CD) или универсальный цифровой видеодиск (DVD)), и/или любые другие энергозависимые или энергонезависимые, непереносные считываемые компьютером и/или исполняемые компьютером запоминающие устройства, хранящие информацию, данные и/или команды, которые могут использоваться схемой 142 обработки. В некоторых вариантах осуществления схема 142 обработки и считываемый компьютером носитель 145 могут рассматриваться как интегрированные.
Альтернативные варианты осуществления беспроводного устройства или UE 140 могут содержать дополнительные компоненты, помимо показанных на фиг. 14b, которые могут быть ответственны за обеспечение некоторых аспектов функциональных возможностей беспроводного устройства, в том числе, любых описанных здесь функциональных возможностей и/или любых функциональных возможностей, необходимых для поддержки описанного выше решения. Как один из примеров, беспроводное устройство 140 может содержать входные интерфейсы, устройства и схемы и выходные интерфейсы, устройства и схемы. Входные интерфейсы, устройства, и схемы выполняются с возможностью разрешения ввода информации в беспроводное устройство 140 и соединяются со схемой 142 обработки, чтобы позволить схеме 142 обработки обрабатывать входные данные. Например, входные интерфейсы, устройства и схемы могут содержать микрофон, датчик приближения или другой датчик, ключи/кнопки, сенсорный дисплей одну или более камер, порт USB или другие элементы ввода. Выходные интерфейсы, устройства и схемы выполняются с возможностью разрешения вывода информации от беспроводного устройства 140 и соединяются со схемой 142 обработки, чтобы позволить схеме 142 обработки выводить информацию из беспроводного устройства 140. Например, выходные интерфейсы, устройства или схемы могут содержать динамик, дисплей, схему вибратора, порт USB, интерфейс головных телефонов или другие элементы вывода. Используя один или более интерфейсов ввода и вывода, устройства и схемы, беспроводное устройство 140 может осуществлять связь с конечными пользователями и/или беспроводной сетью и позволять им извлекать выгоду из описанных здесь функциональных возможностей.
В качестве другого примера, беспроводное устройство или UE 140 может содержать источник 149 электропитания. Источник 149 электропитания может содержать схему управления электропитанием. Источник 149 электропитания может получать электропитание от источника питания, который может либо содержаться внутри, либо быть внешним по отношению к источнику 149 электропитания. Например, беспроводное устройство 140 может содержать источник электропитания в форме батареи или аккумуляторной батареи, которая соединяется или интегрируется с источником 149 электропитания. Другие типы источников электропитания, такие как фотоэлектрические устройства, также могут использоваться. Как дополнительный пример, беспроводное устройство 140 может быть подключено к внешнему источнику электропитания (такому как электрическая розетка) через входную схему или интерфейс, такой как электрический кабель, которым внешний источник электропитания подает питание на источник 149 электропитания. Источник 149 электропитания может подключаться к схеме 148 входного радиоустройства, схеме 142 обработки и/или к считываемому компьютером носителю 145 и быть выполнен с возможностью обеспечения беспроводного устройства 140, содержащего схему 142 обработки, электропитанием для выполнения описанных здесь функциональных возможностей.
Беспроводное устройство 140 может также содержать многочисленные наборы, состоящие из схемы 142 обработки, считываемого компьютером носителя 145, радиосхемы 148 и/или антенны 147 для различных беспроводных технологий, интегрированных в беспроводное устройство 140, работающее, например, по беспроводной технологии GSM, WCDMA, LTE, НОМЕР, WiFi или Bluetooth. Эти беспроводные технологии могут быть интегрированы в одну или различные интегральные схемы и другие компоненты внутри беспроводного устройства 140.
Любые соответствующие этапы, способы или функции, описанные здесь, могут также выполняться одним или более функциональными модулями.
Как показано на фиг. 14c, беспроводное устройство 140 может содержать антенну 147, модуль 14200 обработки, приемопередающий модуль 14300 и модуль 14500 запоминающего устройства, которые могут выполнять этапы или функции, описанные здесь в отношении некоторых вариантов осуществления.
Как показано на фиг. 14d, сетевой узел 1440 может содержать модуль 14420 обработки, приемопередающий модуль 14410 и модуль 14430 запоминающего устройства, которые могут выполнять этапы или функции, описанные здесь в отношении некоторых вариантов осуществления.
Каждый функциональный модуль может содержать программное обеспечение, компьютерные программы, подпрограммы, библиотеки, исходный код, или любую другую форму исполняемых команд, которые выполняются, например, процессором. В некоторых вариантах осуществления каждый функциональный модуль может быть реализован аппаратными средствами и/или программным обеспечением. Например, один или более или все функциональные модули могут быть реализованы процессорами 142 и/или 1442, возможно, совместно с запоминающим устройством 145 и/или 1443. Процессоры 142 и/или 1442 и запоминающее устройство 145 и/или 1443 могут, таким образом, быть выполнены с возможностью разрешения процессорам 142 и/или 1442 выбирать команды из запоминающего устройства 145 и/или 1443 и выполнять выбранные команды, позволяющие соответствующему функциональному модулю выполнять любые раскрытые здесь этапы и функции.
На фиг. 15 схематично показана блок-схема среды 1500 виртуализации, в которой могут быть виртуализированы функции, реализуемые некоторым вариантом(-ами) осуществления. Виртуализация, как она используется здесь, может применяться к узлу (например, виртуализированной базовой станции или виртуализированному узлу радиодоступа), в данном случае, к серверу позиционирования или к устройству (например, к устройству пользователя или к любому типу устройства беспроводной связи), и быть связана с реализацией, в которой по меньшей мере часть функциональных возможностей реализуется в виде виртуального компонента(-ов) (например, через приложение(-я)/компонент(-ы)/функцию(-и) или виртуальную машину(-ы), выполняемые на физическом узле(-ах) обработки в сети(-ях)).
В некоторых вариантах осуществления некоторые или все функции, описанные здесь, могут быть реализованы как виртуальные компоненты, выполняемые одной или более виртуальными машинами, реализованными в виртуальной среде(-ах), под управлением аппаратного узла(-ов) 1530. Дополнительно, в вариантах осуществления, в которых виртуальный узел не является узлом радиодоступа или не требует связанности по радио (например, узел базовой сети или сервер позиционирования), сетевой узел может быть полностью виртуализирован.
Функции могут быть реализованы приложением 1520 (которое альтернативно может быть названо частным случаем программного обеспечения, виртуальным устройством, сетевой функцией, виртуальным узлом или виртуальной сетевой функцией), осуществляющим реализацию этапов какого-то способа(-ов) в соответствии с некоторым вариантом(-ами) осуществления. Приложение 1520 работает в среде 1500 виртуализации, которая обеспечивает аппаратные средства 1530, содержащие схему 1560 обработки и память 1590. Память содержит команды 1595, исполняемые схемой 1560 обработки, за счет чего приложение 1520 действует так, чтобы выполнять способ(-ы) или этапы способа(-ов), ранее описанные в отношении некоторого варианта(-ов) осуществления.
Среда 1500 виртуализации содержит универсальное или специализированное сетевое устройство(-а) 1530, содержащее набор из одного или более процессоров или схем 1560 обработки, которые могут быть коммерческими стандартными (off-the-shelf, COTS) процессорами, специализированными интегральными схемами (ASIC) или любым другим типом схемы обработки, включающей цифровые или аналоговые аппаратные компоненты или процессоры специального назначения. Аппаратное устройство(-а) содержит память 1590-1, которая может быть переносной памятью для хранения команд 1595 или программного обеспечения, выполняемого схемой 1560 обработки. Аппаратное устройство(-а) содержит контроллер(-ы) 1570 сетевого интерфейса (network interface controller, NIC), также известные как сетевые карты, которые содержат физический сетевой интерфейс 1580. Аппаратное устройство(-а) также содержит непереносной машинно считываемый носитель 1590-2, на котором хранится программное обеспечение 1595 и/или команда, исполняемые схемой 1560 обработки. Программное обеспечение 1595 может содержать любой тип программного обеспечения, включая программное обеспечение для подтверждения уровня виртуализации или гипервизор, программное обеспечение для выполнения виртуальных машин 1540, а также программное обеспечение, позволяющее выполнять функции, описанные в отношении некоторых представленных выше вариантов осуществления.
Виртуальные машины 1540 реализуют виртуальную обработку, виртуальную память, виртуальные сети или интерфейс и виртуальное запоминающее устройство и могут работать на уровне виртуализации или гипервизора 1550. Различные варианты осуществления конкретного случая или виртуального устройства 1520 могут быть реализованы на одной или более виртуальных машинах 1540 и реализации могут быть выполнены различными путями.
Во время работы схема 1560 обработки выполняет программное обеспечение 1595, чтобы обрабатывать гипервизор или уровень виртуализации, которые могут иногда упоминаться как монитор виртуальной машины (virtual machine monitor, VMM). Гипервизор 1550 может представлять собой виртуальную операционную платформу, которая выглядит для виртуальной машины 1540 как сетевые аппаратные средства. Как показано на фиг. 15, аппаратные средства 1530 могут быть автономным сетевым узлом с универсальными или специализированными аппаратными средствами. Аппаратные средства 1530 могут содержать антенну 15225 и могут реализовывать некоторые функции через виртуализацию. Альтернативно, аппаратные средства 1530 могут быть частью большего кластера аппаратных средств (например, как в информационном центре или оборудовании для помещений пользователя (CPE)), где множество аппаратных узлов работают вместе и управляются системой 15100 управления (MANO), которая, помимо прочего, наблюдает за управлением жизненным циклом приложений 1520.
Виртуализация аппаратных средств в некоторых контекстах относится к так называемой сетевой функциональной виртуализации (network function virtualization, NFV). NFV может использоваться для консолидации многих типов сетевого оборудования на основе промышленных стандартных высокопроизводительных серверных аппаратных средств, физических переключателей и физических запоминающих устройств, которые могут быть расположены в информационных центрах и в оборудовании для помещений пользователей. В варианте осуществления сервер позиционирования или его функции могут быть виртуализированы.
В контексте NFV виртуальная машина 1540 является реализацией программного обеспечения физической машины, которая выполняет программы так, как если бы они выполнялись на физической, невиртуализированной машине. Каждая из виртуальных машин 1540 и та часть аппаратных средств 1530, которая выполняет эту виртуальную машину, являющиеся аппаратным средством, выделенным этой виртуальной машине и/или временными интервалами аппаратных средств, временно совместно используемыми этой виртуальной машиной совместно с другой виртуальной машиной(-ами) 1540, формирует отдельный виртуальный сетевой элемент(-ы) (virtual network element, VNE). Также в контексте NFV, виртуальная сетевая функция (Virtual Network Function, VNF) несет ответственность за обработку конкретных сетевых функций, работающих на одной или более виртуальных машинах на вершине сетевой инфраструктуры аппаратных средств, и соответствует приложению 1520 на фиг. 15.
В некоторых вариантах осуществления, один или более радиоблоков 15200, каждый из которых содержит один или более передатчиков 15220 и один или более приемников 15210, могут быть связаны с одной или более антеннами 15225. Радиоблоки 15200 могут осуществлять связь напрямую с аппаратным узлом(-ами) 1530 через соответствующий сетевой интерфейс(-ы) и могут использоваться в сочетании с виртуальными компонентами, чтобы обеспечить виртуальный узел возможностями радиоустройства, такого как узел радиодоступа или базовая станция.
В некоторых вариантах осуществления может действовать некая сигнализация с использованием системы 15230 управления, которая может альтернативно использоваться для связи между аппаратным узлом(-ами) 1530 и радиоблоком(-ами) 15200.
Специалисты в данной области техники могут предложить модификации и другие варианты осуществления, обладающие преимуществами принципов, представленных в приведенном выше описании и на сопутствующих чертежах. Поэтому следует понимать, что модификации и другие варианты осуществления, такие как конкретные формы, отличные от описанных выше вариантов осуществления, предназначены считаться содержащимися в объеме настоящего раскрытия. Описанные варианты осуществления являются просто иллюстративными и никоим образом не должны считаться ограничивающими. Искомый объем защиты дается добавленной формулой изобретения, а не предшествующим описанием, и все вариации и эквиваленты, которые попадают в пределы действия формулы изобретения, подразумеваются содержащимися в ней. Хотя здесь могут использоваться конкретные термины, они используются только в общем и описательном смысле, а не для целей ограничения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСЛОВНОЕ ЗАВЕРШЕНИЕ RSTD-ИЗМЕРЕНИЙ | 2017 |
|
RU2719288C1 |
| УСТРОЙСТВА, СИСТЕМЫ И СПОСОБЫ ДЛЯ ПЕРЕДАЧИ СИГНАЛА ПОЗИЦИОНИРОВАНИЯ | 2018 |
|
RU2741319C1 |
| ПРЕДСТАВЛЕНИЕ ОТЧЕТА ПО ИЗМЕРЕНИЮ РАДИОСИГНАЛА | 2016 |
|
RU2680973C1 |
| ПОДАВЛЕНИЕ ИНТЕРФЕРЕНЦИИ СИГНАЛОВ В БЕСПРОВОДНОЙ СЕТИ | 2014 |
|
RU2631667C2 |
| МЕЖЧАСТОТНЫЕ ИЗМЕРЕНИЯ НАБЛЮДАЕМОЙ РАЗНОСТИ ВРЕМЕНИ ПРИБЫТИЯ СИГНАЛОВ | 2011 |
|
RU2540118C2 |
| СПОСОБЫ И УСТРОЙСТВО ДЛЯ ПОДДЕРЖКИ МЕЖЧАСТОТНЫХ ИЗМЕРЕНИЙ | 2011 |
|
RU2708961C2 |
| СПОСОБ ДЛЯ АДАПТАЦИИ ДИСКРЕТНОСТИ ПЕРЕДАЧИ ОТЧЕТОВ ОБ ИЗМЕРЕНИЯХ | 2016 |
|
RU2684418C1 |
| СПОСОБЫ И УСТРОЙСТВО ДЛЯ ПОДДЕРЖКИ МЕЖЧАСТОТНЫХ ИЗМЕРЕНИЙ | 2011 |
|
RU2579940C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОЗИЦИОНИРОВАНИЕМ ЦЕЛЕВОГО УСТРОЙСТВА В СЕТИ СВЯЗИ | 2018 |
|
RU2736885C1 |
| Способ и устройство для позиционирования в системе беспроводной связи | 2023 |
|
RU2805220C1 |
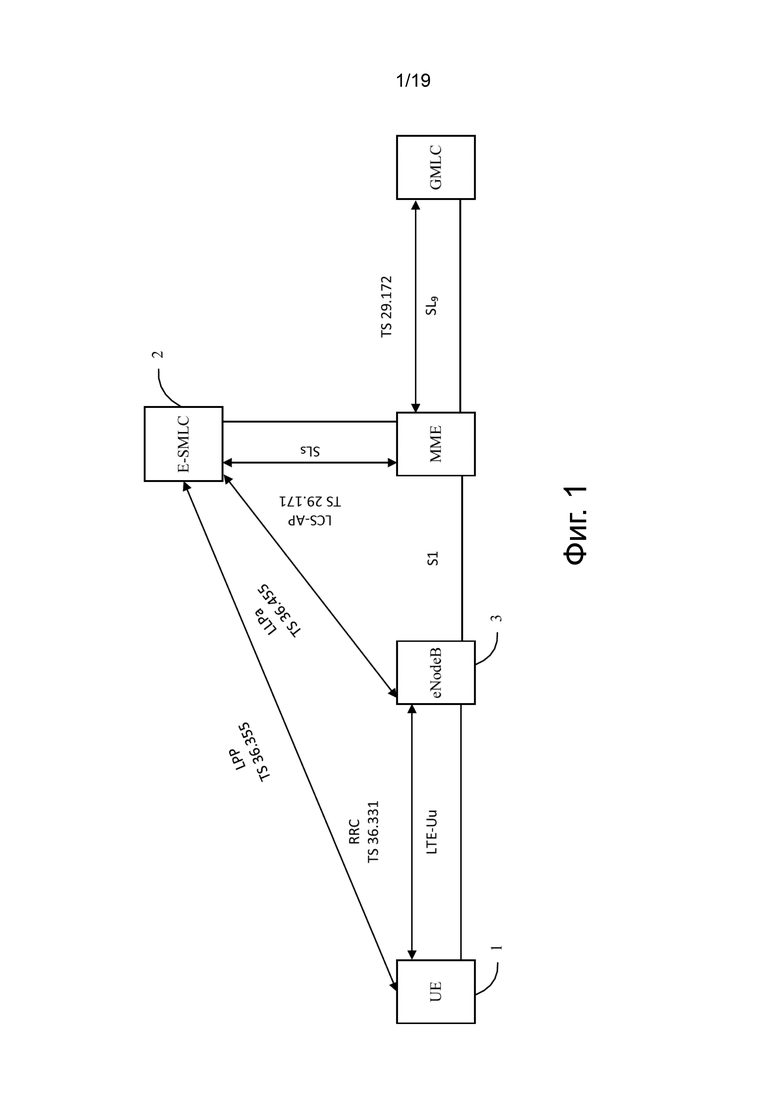
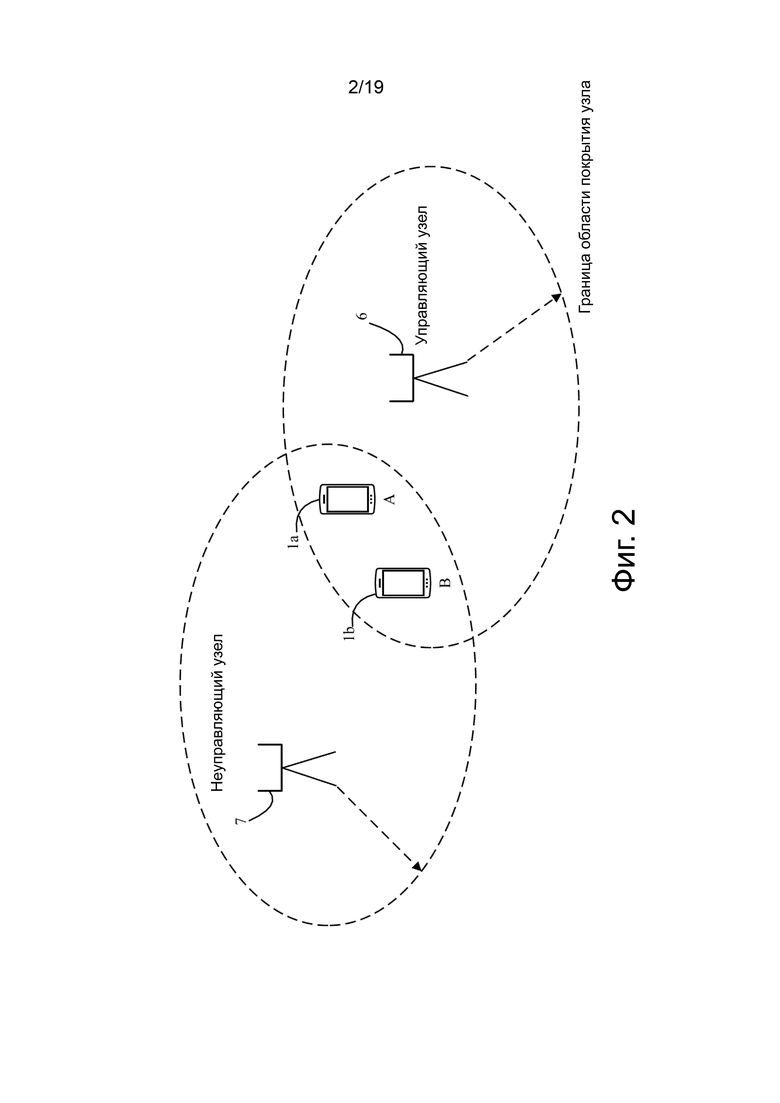
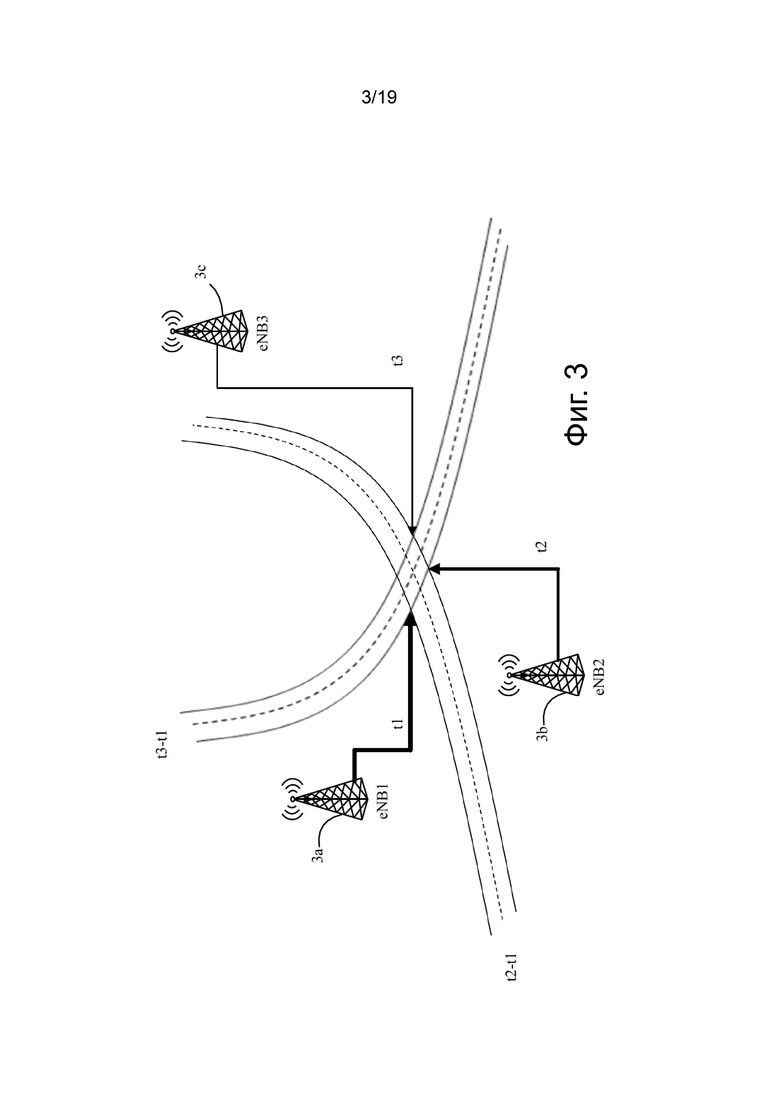


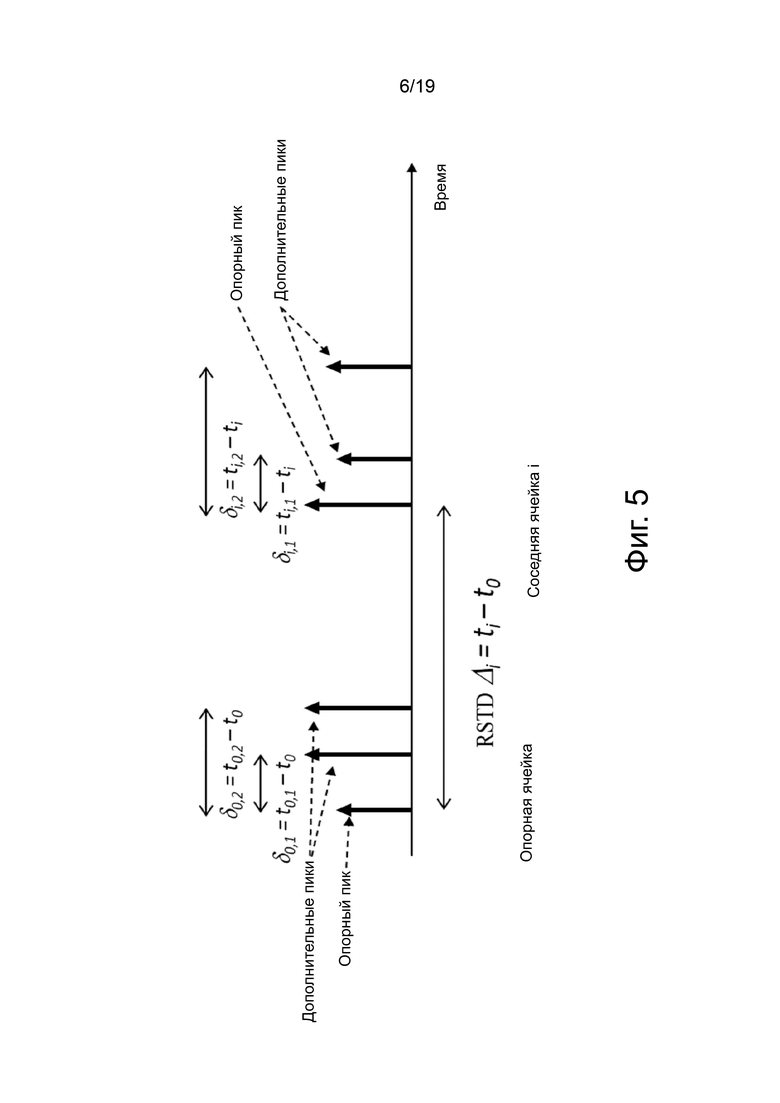
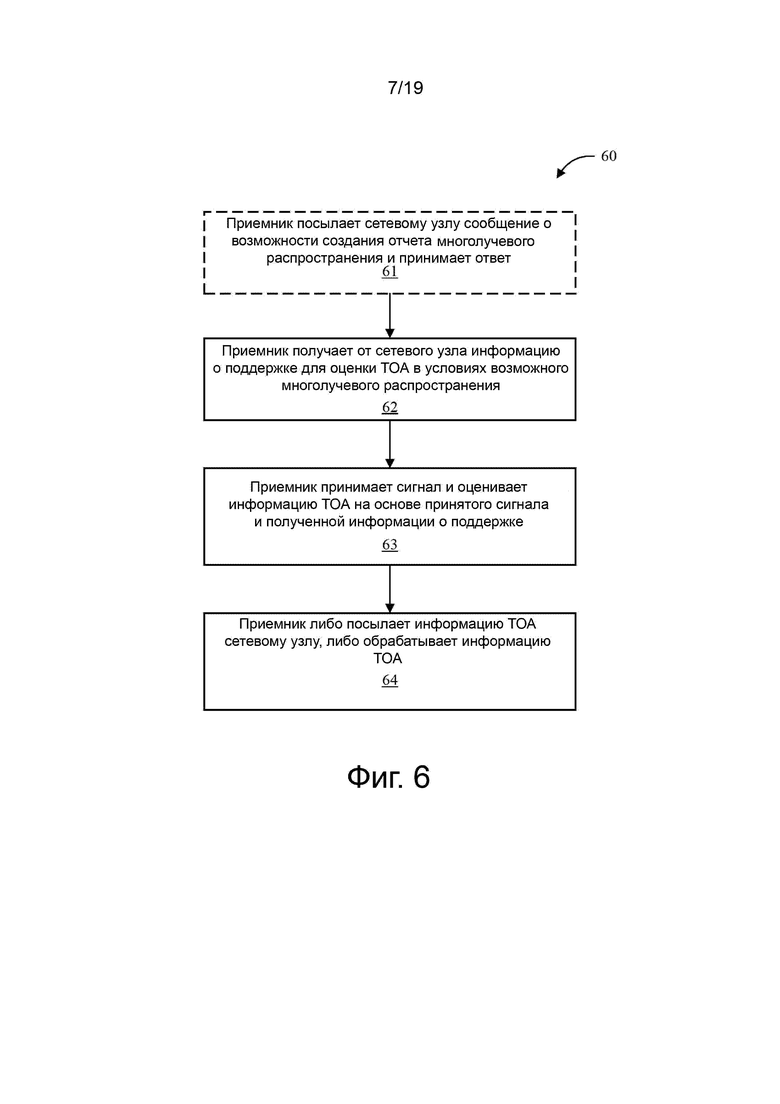
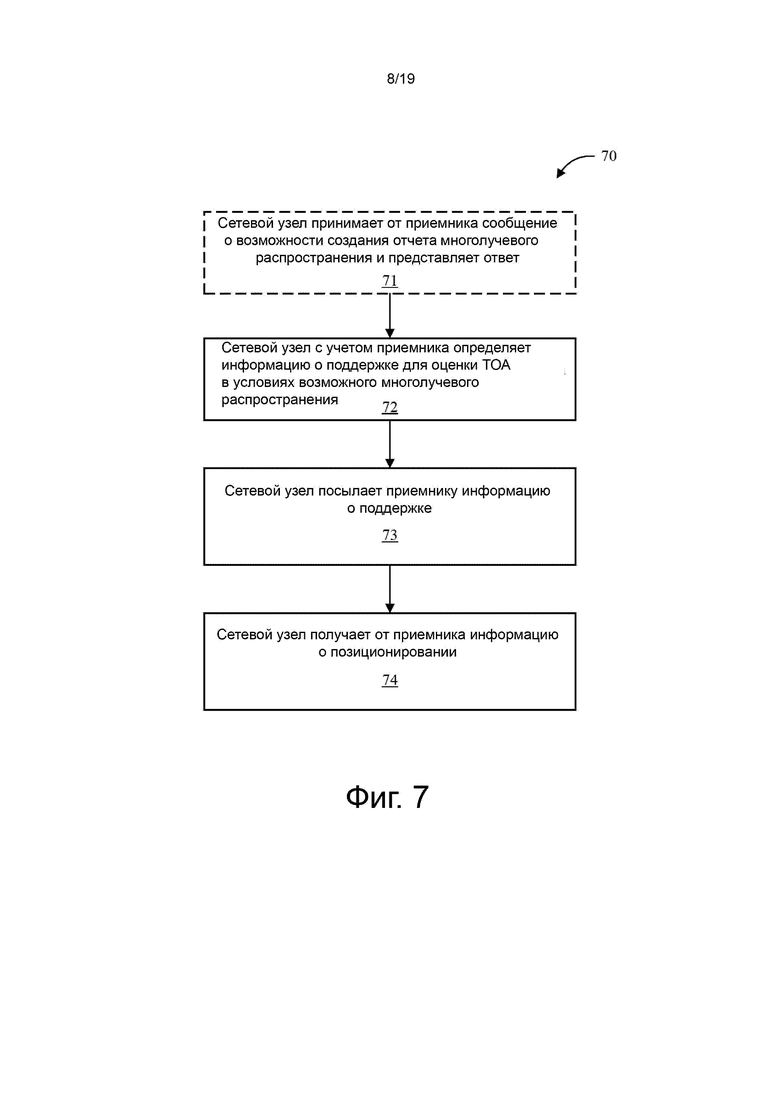

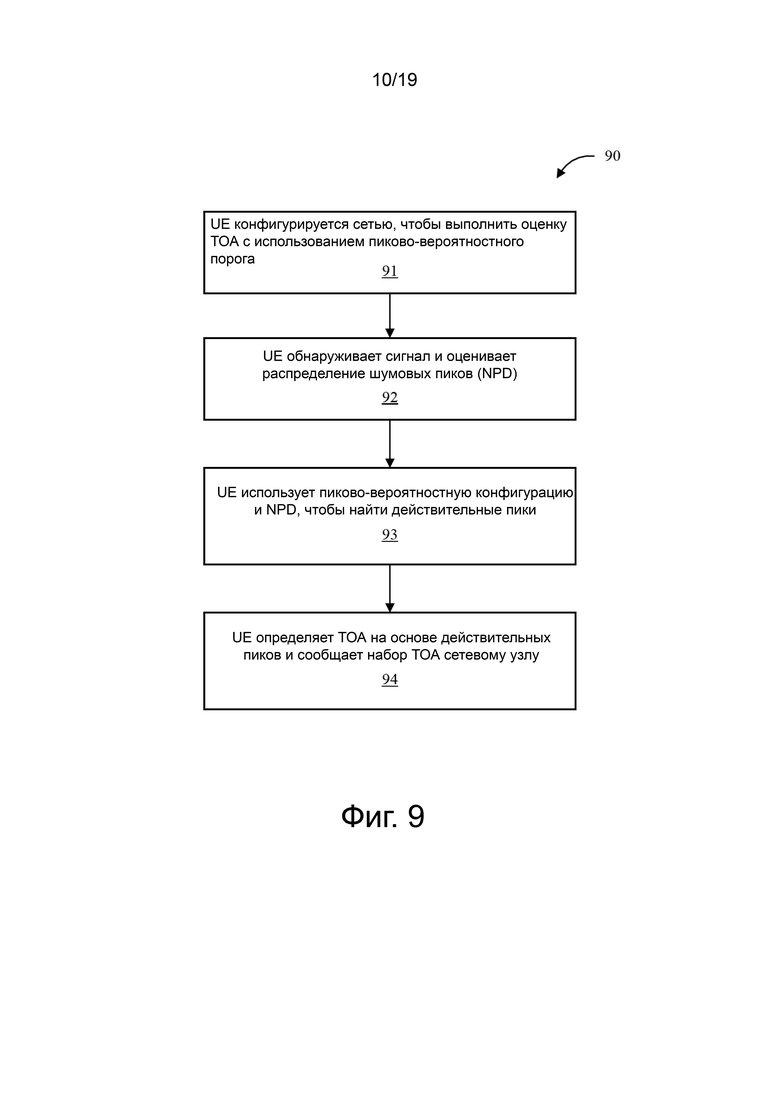

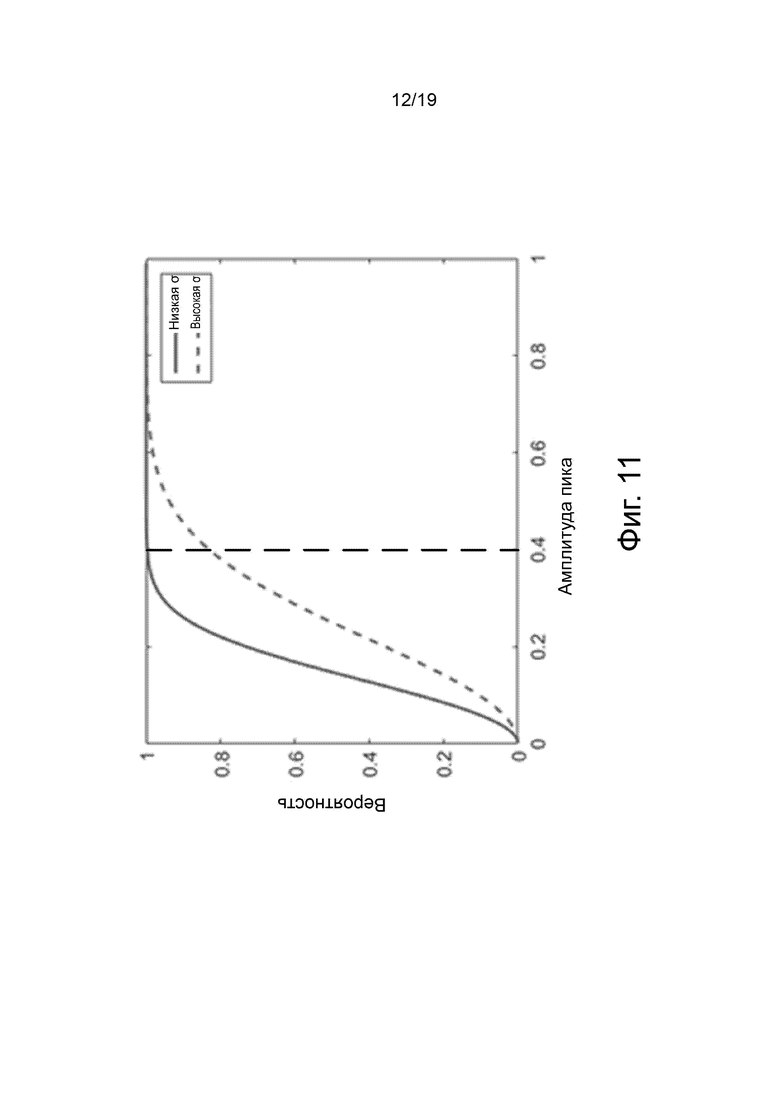


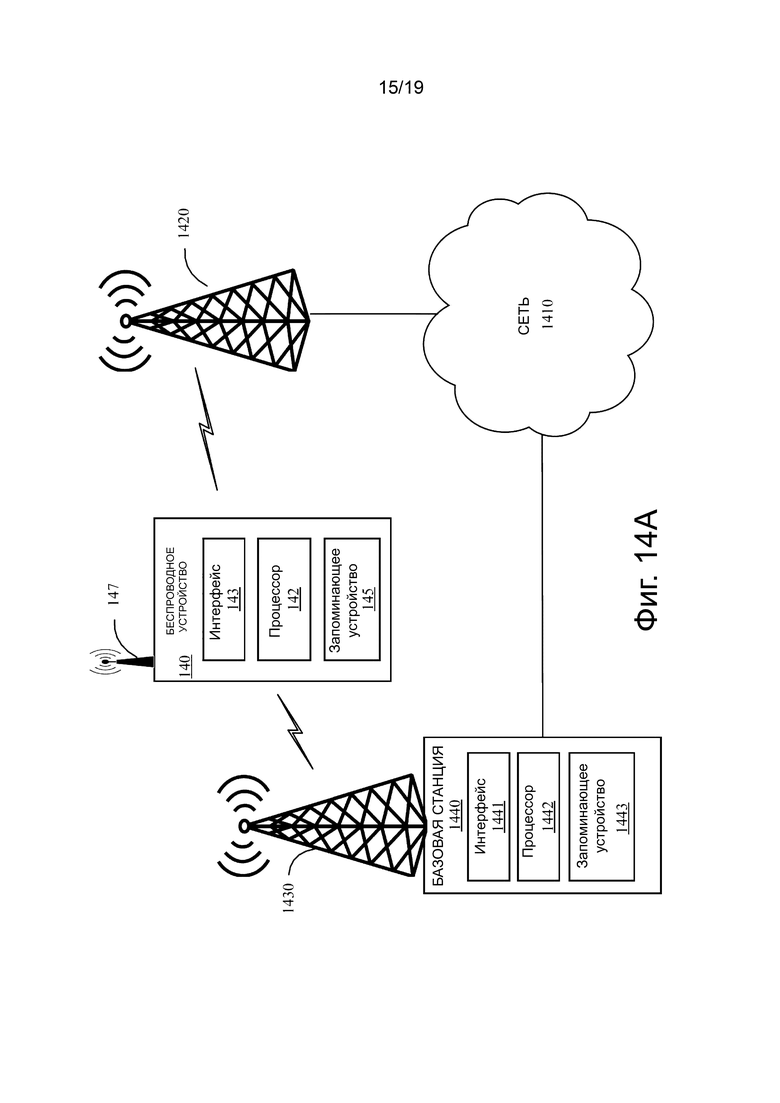



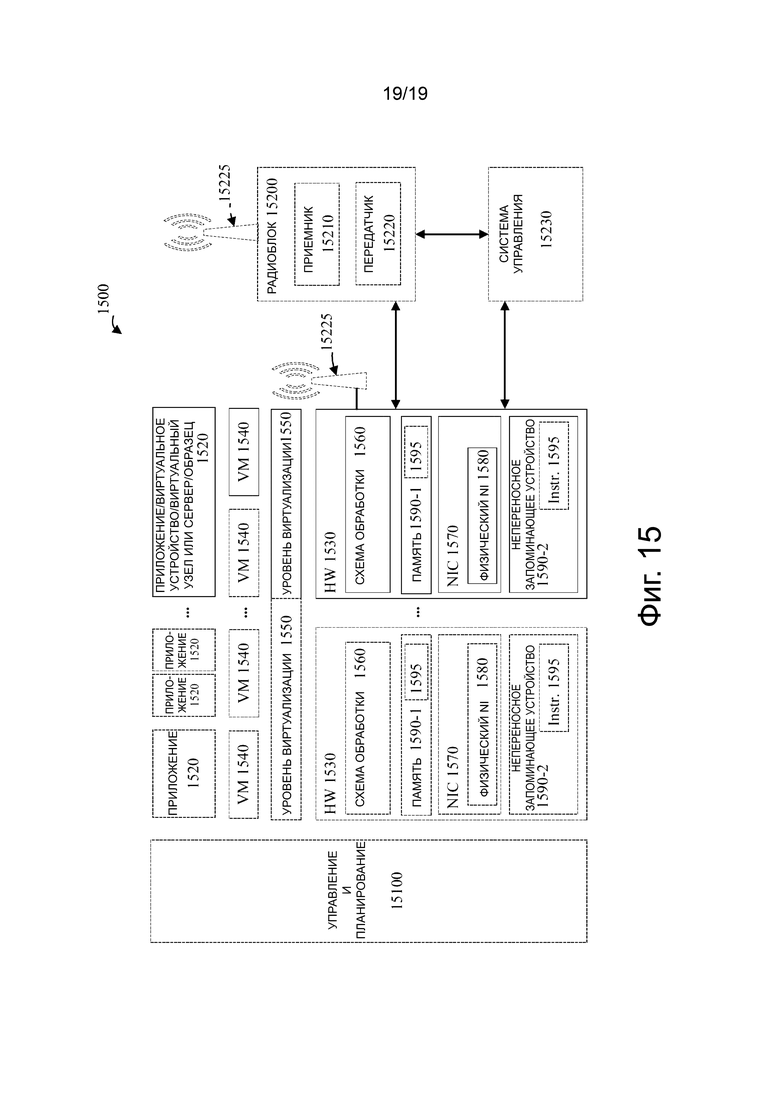
Изобретение относится к технике связи и может использоваться для предоставления результатов измерений разности во времени относительно опорного сигнала (RSTD) для наблюдаемой разности во времени прибытия (OTDOA) от беспроводного устройства серверу позиционирования. Технический результат состоит в повышении точности позиционирования. Для этого способ содержит этапы, на которых посылают от беспроводного узла на сервер позиционирования возможность поддержки измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении, принимают от сервера позиционирования на беспроводном узле запрос измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении. Способ содержит этапы, на которых принимают от сервера позиционирования на беспроводном узле вспомогательные данные, обеспечивающие подробные сведения о требуемых измерениях позиционирования по OTDOA, используя RSTD при многолучевом распространении, и принимают на беспроводном узле сигнал от опорной ячейки RSTD и соседней ячейки. Способ содержит этапы, на которых наблюдают на беспроводном узле разность во времени между принятыми сигналами, получая, таким образом, требуемые результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении, и посылают требуемые результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении, от беспроводного узла на сервер позиционирования. 5 н. и 32 з.п. ф-лы, 19 ил.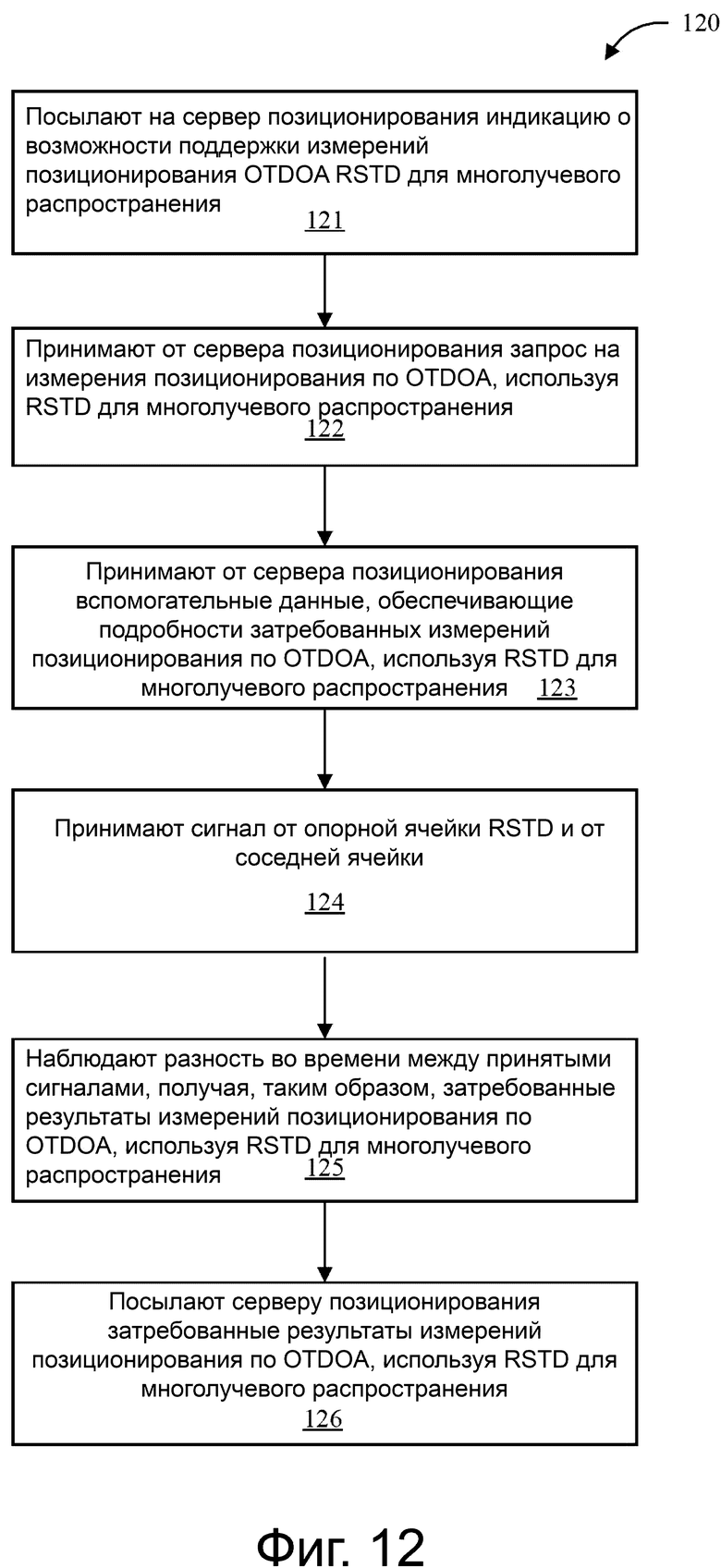
1. Способ, выполняемый в целевом устройстве, для предоставления измерений разности во времени относительно опорного сигнала (RSTD) для наблюдаемой разности во времени прибытия (OTDOA) серверу позиционирования, причем способ содержит этапы, на которых:
посылают на сервер позиционирования индикацию возможности поддержки измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении;
принимают от сервера позиционирования запрос на измерения позиционирования по OTDOA, используя RSTD при многолучевом распространении;
принимают от сервера позиционирования вспомогательные данные, обеспечивающие подробные сведения о требуемых измерениях позиционирования по OTDOA, используя RSTD при многолучевом распространении;
принимают сигнал от опорной ячейки, используемой при определении RSTD, и от соседней ячейки;
наблюдают разность во времени между принятыми сигналами, получая, таким образом, требуемые результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении; и
посылают на сервер позиционирования требуемые результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении.
2. Способ по п. 1, в котором соседняя ячейка, для которой подлежит наблюдению разность во времени, указывается сервером позиционирования во вспомогательных данных.
3. Способ по п. 1 или 2, в котором вспомогательные данные содержат индикацию, которая инициирует целевое устройство для поиска дополнительных пиков по меньшей мере в одном принятом сигнале.
4. Способ по п. 3, в котором сервер позиционирования инициирует выполнение способа, основываясь на архивной информации, указывающей, что целевое устройство ранее сообщало результаты измерений, использующих RSTD при многолучевом распространении.
5. Способ по п. 3, в котором сервер позиционирования инициирует выполнение способа, основываясь на архивной информации, указывающей, что целевое устройство ранее было позиционировано с низкой точностью.
6. Способ по п. 3, в котором целевое устройство ранее было позиционировано, основываясь по меньшей мере на двух способах позиционирования, таких как глобальная система спутниковой навигации (GNSS) и RSTD для OTDOA.
7. Способ по п. 1, в котором на этапе наблюдения дополнительно используют пиково-вероятностный порог с заданным значением для оценки результатов измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении, где более высокий порог обеспечивает лучшую устойчивость к шумам.
8. Способ по п. 7, в котором целевое устройство выполнено с возможностью исключения результатов измерений позиционирования по OTDOA не по линии прямой видимости (NLOS), позволяя, таким образом, устанавливать более низкий пиково-вероятностный порог.
9. Способ по п. 7, в котором пиково-вероятностный порог конфигурируется сервером позиционирования и предоставляется целевому устройству.
10. Способ по п. 7, в котором пиково-вероятностный порог основан на данных развертывания ячейки и сетевом алгоритме позиционирования, причем результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении, основаны на идентифицированных действительных пиках сигналов от опорной и соседней ячеек, причем действительный пик является пиком, превышающим пиково-вероятностный порог, при этом результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении, определяются как первые из действительных пиков от опорной и соседней ячеек.
11. Способ, выполняемый на сервере позиционирования для приема от целевого устройства результатов измерений разности во времени относительно опорного сигнала (RSTD) для наблюдаемой разности во времени (OTDOA), причем способ содержит этапы, на которых:
принимают от целевого устройства индикацию о возможности поддержки измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении;
посылают целевому устройству запрос результатов измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении;
посылают целевому устройству вспомогательные данные, обеспечивающие подробные сведения о требуемых измерениях позиционирования по OTDOA, используя RSTD при многолучевом распространении; и
принимают от целевого устройства требуемые результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении.
12. Способ по п. 11, в котором сервер позиционирования указывает во вспомогательных данных соседнюю ячейку, для которой целевым устройством подлежит наблюдению разность во времени.
13. Способ по п. 11 или 12, в котором сервер позиционирования инициирует поиск целевым устройством дополнительных пиков по меньшей мере в одном принятом сигнале посредством индикации во вспомогательных данных.
14. Способ по п. 13, в котором сервер позиционирования инициирует выполнение способа, основываясь на архивной информации, указывающей, что целевое устройство ранее сообщало результаты измерений, используя RSTD при многолучевом распространении.
15. Способ по п. 13, в котором сервер позиционирования инициирует выполнение способа, основываясь на архивной информации, указывающей, что целевое устройство ранее было позиционировано с низкой точностью.
16. Способ по п. 13, в котором целевое устройство было ранее позиционировано, основываясь по меньшей мере на двух способах позиционирования, таких как глобальная система спутниковой навигации (GNSS) и RSTD для OTDOA.
17. Способ по п. 11, в котором сервер позиционирования предоставляет целевому устройству пиково-вероятностный порог с заданным значением для оценки результатов измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении, где более высокий порог обеспечивает более высокую устойчивость к шумам.
18. Способ по п. 17, в котором пиково-вероятностный порог основан на данных развертывания ячейки и сетевом алгоритме позиционирования, причем измерения позиционирования по OTDOA, используя RSTD при многолучевом распространении, основаны на идентифицированных действительных пиках сигналов от опорной и соседних ячеек, при этом действительный пик является пиком, превышающим пиково-вероятностный порог, причем результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении, определяются как первые из действительных пиков.
19. Беспроводное устройство, характеризующееся тем, что выполнено с возможностью предоставления измерений разности во времени относительно опорного сигнала (RSTD) для наблюдаемой разности во времени прибытия (OTDOA) серверу позиционирования, причем беспроводное устройство содержит схему обработки и память, и упомянутая память содержит команды, исполняемые упомянутой схемой обработки, в результате чего упомянутое беспроводное устройство выполнено с возможностью:
посылать серверу позиционирования индикацию о возможности поддержки измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении;
принимать от сервера позиционирования запрос измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении;
принимать от сервера позиционирования вспомогательные данные, обеспечивающие подробные сведения о требуемых измерениях позиционирования по OTDOA, используя RSTD при многолучевом распространении;
принимать сигнал от опорной ячейки RSTD и от соседней ячейки;
наблюдать разность во времени между принятыми сигналами, получая, таким образом, требуемые результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении; и
посылать на сервер позиционирования требуемые результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении.
20. Беспроводное устройство по п. 19, в котором соседняя ячейка, для которой подлежит наблюдению разница во времени, указывается сервером позиционирования в вспомогательных данных.
21. Беспроводное устройство по п. 19 или 20, в котором вспомогательные данные содержат индикацию, которая инициирует беспроводное устройство для поиска дополнительных пиков по меньшей мере в одном принятом сигнале.
22. Беспроводное устройство по п. 21, в котором выполнение способа инициируется сервером позиционирования, основываясь на архивной информации, указывающей, что беспроводное устройство ранее сообщало результаты измерений, используя RSTD при многолучевом распространении.
23. Беспроводное устройство по п. 21, в котором выполнение способа инициируется сервером позиционирования, основываясь на архивной информации, указывающей, что беспроводное устройство ранее было позиционировано с низкой точностью.
24. Беспроводное устройство по п. 21, характеризующееся тем, что было ранее позиционировано, основываясь по меньшей мере на двух способах позиционирования, таких как глобальная система спутниковой навигации (GNSS) и RSTD для OTDOA.
25. Беспроводное устройство по п. 19, характеризующееся тем, что дополнительно выполнено с возможностью наблюдения разности во времени, используя пиково-вероятностный порог с данным значением, для оценки результатов измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении, где более высокий порог обеспечивает лучшую устойчивость к шумам.
26. Беспроводное устройство по п. 25, характеризующееся тем, что дополнительно выполнено с возможностью исключения результатов измерений по OTDOA не по линии прямого видения (NLOS), позволяя, таким образом, устанавливать более низкий пиково-вероятностный порог.
27. Беспроводное устройство по п. 25, в котором пиково-вероятностный порог конфигурируется сервером позиционирования и предоставляется беспроводному устройству.
28. Беспроводное устройство по п. 25, в котором пиково-вероятностный порог основан на данных развертывания ячейки и сетевом алгоритме позиционирования, причем измерения позиционирования по OTDOA, используя RSTD при многолучевом распространении, основываются на идентифицированных действительных пиках сигналов от опорной и соседней ячеек, при этом действительный пик является пиком, превышающим пиково-вероятностный порог, причем результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении, определяются как первые из действительных пиков от опорной и соседней ячеек.
29. Сервер позиционирования, характеризующийся тем, что выполнен с возможностью приема от беспроводного устройства результатов измерений разности во времени относительно опорного сигнала (RSTD) для наблюдаемой разности во времени прибытия (OTDOA), причем сервер позиционирования содержит схему обработки и память, и упомянутая память содержит команды, исполняемые упомянутой схемой обработки, вследствие чего упомянутый сервер позиционирования выполнен с возможностью:
принимать от беспроводного устройства индикацию о возможности поддержки измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении;
посылать беспроводному устройству запрос измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении;
посылать беспроводному устройству вспомогательные данные, предоставляющие подробные сведения о требуемых измерениях позиционирования по OTDOA, используя RSTD при многолучевом распространении; и
принимать от беспроводного устройства требуемые результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении.
30. Сервер позиционирования по п. 29, характеризующийся тем, что выполнен с возможностью указывать во вспомогательных данных соседнюю ячейку, для которой разность во времени подлежит наблюдению целевым устройством.
31. Сервер позиционирования по п. 29 или 30, характеризующийся тем, что выполнен с возможностью, посредством индикации в вспомогательных данных, инициировать целевое устройство для поиска дополнительных пиков по меньшей мере в одном принятом сигнале.
32. Сервер позиционирования по п. 31, характеризующийся тем, что выполнен с возможностью инициировать выполнение способа, основываясь на архивной информации, указывающей, что целевое устройство ранее сообщало результаты измерений, используя RSTD при многолучевом распространении.
33. Сервер позиционирования по п. 31, характеризующийся тем, что выполнен с возможностью инициировать выполнение способа, основываясь на архивной информации, указывающей, что целевое устройство было ранее позиционировано с низкой точностью.
34. Сервер позиционирования по п. 31, в котором целевое устройство было ранее позиционировано, основываясь по меньшей мере на двух способах позиционирования, таких как глобальная система спутниковой навигации (GNSS) и RSTD для OTDOA.
35. Сервер позиционирования по п. 29, характеризующийся тем, что выполнен с возможностью предоставлять целевому устройству пиково-вероятностный порог с заданным значением для оценки результатов измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении, где более высокий порог обеспечивает более высокую устойчивость к шумам.
36. Сервер позиционирования по п. 35, в котором пиково-вероятностный порог основан на данных развертывания ячейки и сетевом алгоритме позиционирования, причем результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении, основаны на идентифицированных действительных пиках сигналов от опорной и соседней ячеек, причем действительный пик является пиком, превышающим пиково-вероятностный порог, при этом результаты измерений позиционирования по OTDOA, используя RSTD при многолучевом распространении, определяются как первые из действительных пиков.
37. Энергонезависимый считываемый компьютером носитель, на котором хранятся команды для выполнения любого из способов по пп. 1-22.
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| СЭНДВИЧ-ПАНЕЛЬ | 2011 |
|
RU2484411C2 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ОБЪЕКТА | 1991 |
|
RU2013025C1 |
| US 7737893 B1, 15.06.2010. | |||

