ИСПРАШИВАНИЕ ПРИОРИТЕТА
Настоящая Заявка на патент испрашивает приоритет на основе Предварительной заявки №60/489653, поданной 23 июля 2003 года и от имени заявителя этой заявки, и таким образом явно содержится в данном документе в качестве ссылки.
УРОВЕНЬ ТЕХНИКИ
Изобретение относится, в общем, к устройствам связи с модулированной несущей волной и более конкретно к способу связи, устройствам и системам, использующим электрические или электромагнитные сигналы, передающие информационный сигнал азимута от одной точки к другой в форме дискретных изменений в некотором параметре электрического или электромагнитного сигнала, используемых в соединении со способами, устройствами и системами определения местоположения такого типа, в котором местоположение определяется от совокупности спутников.
Существует множество различных типов беспроводных систем для различных видов связи, например сотовые сети для телефонной связи, широкополосные службы персональной связи (PCS), беспроводные локальные сети (LAN), системы спутниковой связи и двусторонние радиосистемы. В типичном варианте такие беспроводные системы включают в себя стационарную инфраструктуру, имеющую одно или более устройств связи, и удаленные устройства, которые могут быть либо стационарными, либо мобильными. Примеры мобильных удаленных устройств, также называемых мобильными станциями (MS), включают в себя сотовые телефоны, спутниковые телефоны, персональные компьютеры, поддерживающие беспроводную связь, персональные цифровые помощники (PDA) и другие беспроводные устройства. Стационарные удаленные устройства могут включать в себя, например, станции беспроводной местной линии связи (WLL).
В типичном варианте, инфраструктура беспроводной системы включает один или более модулей базовой станции (BTS) в фиксированных местоположениях, которые связываются со станциями MS. Базовые станции могут также связываться со стационарными удаленными устройствами, друг с другом или с внешней сетью.
Во многих ситуациях требуется определять местоположение мобильной MS. Например, многие службы на базе информации о местоположении (LBS) связывают определенную информацию с пользователем MS, основываясь на местоположении MS. Например, LBS может предоставлять пользователю MS направление движения к точке назначения, заданной пользователем, на основании местоположения пользователя. Или LBS может предоставлять информацию о проходящей промо-акции по распродажам, если пользователь расположен в непосредственной близости от магазина, где проходит распродажа. Другие службы LBS включают в себя управление играми, безопасностью и парком устройств.
Другой причиной для определения местоположения модуля MS является поддержка операторов мобильной связи в соответствии с инструкцией Федеральной правительственной Комиссии США по связи (FCC), которая требует от операторов Соединенных Штатов наличия возможности определять местоположение сотового телефона, с которого делается аварийный вызов «911», с точностью 50 метров для 67 процентов таких вызовов и с точностью 150 метров для 95 процентов таких вызовов.
Различные подходы для получения решения о местоположении могут быть реализованы так, чтобы определить географическое местоположение модуля MS в системе связи. Сравнительные характеристики различных подходов, приложенных к любому конкретному модулю MS и типу системы беспроводной связи, будут зависеть, по меньшей мере, частично от характеристик географического региона, где находится MS. Следовательно, было бы желательно выбирать решение о местоположении на основе характеристик решения о местоположении в окружающей среде, в которой находится MS. Существует необходимость в способе и устройстве, которое может выбирать подход к решению о местоположении.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Способ и устройство для установления географического местоположения удаленного устройства в системе беспроводной связи включает в себя определение первого решения о местоположении удаленного устройства, используя первый набор данных о местоположении, и определение второго решения о местоположении удаленного устройства, используя второй набор данных о местоположении. Выбор производится между первым решением о местоположении и вторым решением о местоположении на основании предопределенного критерия выбора.
Первый набор данных о местоположении может включать в себя сетевые измерения, такие как измерения фазы пилот-сигнала и измерение задержки полного прохождения. Второй набор данных о местоположении может включать в себя несетевые измерения, например спутниковые измерения, включая измерения глобальной системы позиционирования на местности(GPS).
Выбор между первым решением о местоположении и вторым решением о местоположении может включать в себя сравнение соответствующих показателей качества для двух решений о местоположении, например сравнение относительной ошибки оценки местоположения в горизонтальной плоскости соответствующих решений о местоположении. Кроме того, выбор может сместиться в пользу одного из решений о местоположении, например GPS-решение, пока размер ошибки другого решения о местоположении не меньше порогового значения: в таком случае может быть выбрано другое решение о местоположении.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 - схема, иллюстрирующая части системы беспроводной связи.
Фиг.2 - блок-схема, иллюстрирующая дополнительные детали частей системы беспроводной связи, показанной на фиг.1.
Фиг.3 - структурная схема, показывающая этапы установления местоположения мобильной станции.
Фиг.4 - структурная схема, показывающая дополнительные детали способа установления местоположения мобильной станции.
Фиг.5 - структурная схема, показывающая дополнительные аспекты способа установления местоположения мобильной станции.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Описываются методики, которые улучшают выбор решения о местоположении для установления местоположения мобильной станции (MS) в системе беспроводной связи. Существует большое количество различных решений для установления географического местоположения MS. Фраза «географическое местоположение» используется так, чтобы характеризовать местоположение, принимая в расчет плоскую, несферическую форму Земли. Это также упоминается как «геодезическое положение».
Как правило, различные решения установления географического местоположения делятся на две категории: сетевые, относящиеся к наземным методам, и несетевые, включающие спутниковые данные.
Наземные решения, в общем, содержат в себе информацию о сигналах, передаваемых между MS и сетью системы беспроводной связи или инфраструктурой, внутри которой функционирует MS. Примером таких сетевых решений является измерение времени прихода (ТОА) сигнала MS, принятого двумя различными стационарными приемниками внутри сети. Различие во времени прихода сигнала к соответствующим различным приемникам задает гиперболу, на которой располагается MS.
Другим примером сетевого решения является измерение временной разницы прихода (TDOA) пилот-сигналов, которые синхронизированы друг с другом и передаются от различных передатчиков в сети до станции MS. Так как большая часть антенн инфраструктуры сотовой системы разделена на секторы и используют уникальный сигнал передачи для каждого сектора, идентифицируя уникальный сигнал передачи, может быть определена информация об угле прихода (АОА) сигнала от BTS.
Другим примером сетевого решения является измерение задержки полного прохождения сигнала, переданного из сети станции MS и обратно к сети. RTD сигнала предоставляет информацию об удаленности MS от передатчика/ приемника сети.
Несетевые решения используют информацию из источников, отличных от беспроводных сетей. Например, MS может собирать информацию со спутников глобальной системы позиционирования (GPS), расположенных на земле передатчиков системы дальней радионавигации (LORAN) и от других навигационных систем. Если несетевое решение использует GPS, MS запрашивает сигналы, переданные, по меньшей мере, от четырех GPS-спутников для того, чтобы вычислить решение о местоположении в трех плоскостях, или использует, по меньшей мере, три спутника, чтобы вычислить решение о местоположении, если высота над уровнем моря известна или предполагается. Может быть установлено местоположение MS путем измерения фазы принятого GPS-сигнала и демодуляцией навигационного сообщения в GPS-сигнале для того, чтобы восстановить «эфемеридные» данные, задающие местоположение спутника.
Сетевые и несетевые решения могут быть объединены в так называемое «гибридное решение» с тем, чтобы улучшить установление местоположения MS. Например, в сельских и пригородных регионах может не быть большого количества сетевых передатчиков и приемников в пределах удаленности MS. Сетевые решения, следовательно, не могут обеспечить достаточно точного решения о местоположении. Тем не менее в тех же сельских и пригородных регионах несетевые решения могут быть вычислены GPS-приемником, который обычно может запрашивать сигналы от четырех или более спутников.
Наоборот, в густонаселенных городских регионах и внутри зданий GPS-приемники могут не обнаружить достаточного количества спутниковых сигналов для того, чтобы иметь возможность установить местоположение. Тем не менее в таких областях может присутствовать соответствующим образом установленная сетевая инфраструктура, такая, что MS находится внутри зоны покрытия двух или более базовых станций. Другими словами, гибридное решение имеет преимущество в информации, которая всегда доступна как для MS, так и для беспроводной сети, т.е. от сетевых решений, и объединяет ее с навигационной информацией, полученной за пределами сети, т.е. от несетевых решений, для улучшения установления местоположения MS.
Фиг.1 иллюстрирует части системы 101 беспроводной связи, которая включает в себя инфраструктуру беспроводной сети с множеством базовых станций 102 и 103 и множеством MS 104 (для простоты на фиг.1 проиллюстрирована только одна MS). Примеры MS 104 включают в себя сотовые телефоны, спутниковые телефоны, персональные компьютеры, поддерживающие беспроводную связь, персональные цифровые помощники (PDA) и другие беспроводные устройства.
Система 101 беспроводной связи может быть разработана так, чтобы поддерживать один или более стандартов беспроводной передачи данных. Например, стандарты могут включать в себя TIA/EIA-95-B (IS-95), HA/EIA-98-C (IS-98), Проект партнерства третьего поколения (3rd Generation Partnership Project, 3GPP), Проект партнерства третьего поколения 2 (3GPP2), TIA/EIA/IS-2000 (cdma2000), Широкополосная CDMA (WCDMA) или подобные. В общем, технологии, описанные в данном документе, могут быть использованы в любой системе связи, построенной поверх аналоговых или цифровых связей, а также в любой технологии доступа к системе связи, включая множественный доступ с временным разделением сигналов (TDMA), множественный доступ с кодовым разделением сигналов (CDMA) и любые другие технологии множественного доступа.
В общем, сигналы 132, передаваемые от базовой станции 102 или 103 к MS 104, называются как передаваемые в направлении прямой линии связи, в то время как сигналы 134', передаваемые от MS 104 к базовой станции 102 и 103, называются как передаваемые в направлении обратной линии связи. Сигналы, которые идут по прямой линии связи и по обратной линии связи, могут проходить различными множественными путями между базовой станцией 102 и MS 104. Как показано, сигналы прямой и обратной линий связи могут быть отражены препятствиями 150, например зданиями, деревьями, автомобилями и людьми, приводя к тому, что на базовой станции 102 и MS 104 принимаются множественные экземпляры сигнала. Такие множественные экземпляры сигнала обычно называют «многолучевыми» сигналами. Помимо отраженных сигналов, препятствия могут полностью блокировать прохождение сигнала, передаваемого между базовой станцией 102 и MS 104.
Среда многолучевого распространения представляет сложности для множества из возможных решений о местоположении. Например, если сигналы, которые перемещаются между базовой станцией 102 и MS 104, перемещаются по многолучевому пути, то решения о местоположении, которые используют время прохождения сигнала, например RTD, будут давать ошибку, поскольку сигнал проходит путь больший, чем реальное расстояние между базовой станцией 102 и MS 104. Подобным образом, решение о местоположении, которое использует TDOA пилот-сигналов от различных базовых станций, будет давать ошибку, поскольку время прохождения сигнала будет зависеть от расстояния многолучевого распространения, которое отличается от реального расстояния между базовой станцией 102 и MS 104. Многолучевое распространение также может приводить к ошибкам в решении о местоположении, если многолучевое распространение является таким, что сигнал, принятый MS 104, возник в секторе соты, отличном от сектора, в котором MS расположена в текущий момент времени. В дополнение к этим проблемам, среда многолучевого распространения может приводить к снижению уровней сигнала, так что MS 104 не сможет принять сигналы от множества базовых станций 102.
Препятствия 150 также могут мешать приему MS 104 спутниковых сигналов, например, от показанных четырех (4) GPS-спутников 160 A-D. Если препятствий 150 не существует, MS 104 способна принимать сигналы от всех четырех спутников 160A-D. Тем не менее пути сигнала до MS 104 от двух спутников 160С и 160D блокированы препятствием 150. В этом примере MS 104 способна принимать сигналы только от двух спутников 160А и 160В. Таким образом, решение о местоположении не может быть разрешено, основываясь только на GPS, поскольку требуется минимум четыре спутника для трехмерного GPS-решения.
Фиг.2 - блок-схема, показывающая дополнительные детали частей системы 101 беспроводной связи в соединении с деталями базовой станции 102 и MS 104. Передатчик 212, приемник 214, антенна 215, модем 216 базового блока (CSM), блок 218 памяти и контроллер 220 включены в состав базовой станции 102. Приемник 222, передатчик 224, антенна 225, модем 226 мобильной станции (MSM), блок 227 памяти и контроллер 228 включены в состав MS 104. Блоки памяти 218 и 227 сохраняют, в числе другого, программные инструкции. Выполнение программных инструкций, хранящихся в блоке 218 памяти базовой станции и блоке 227 памяти MS, контроллером 220 базовой станции и контроллером 228 MS соответственно, может заставить базовую станцию 102 или MS 104 функционировать таким образом, как описано в данном документе.
Базовая станция 102 может включать в себя навигационный приемник 240, MS 104 может включать в себя навигационный приемник 242, или и базовая станция 102, и MS 104 могут включать в себя навигационные приемники 240 и 242 соответственно. Примеры навигационных приемников, которые могут быть включены в состав базовой станции 102 и MS 104, включают в себя GPS-приемники, LORAN-приемники, приемники системы «Галилей», приемники глобальной навигационной спутниковой системы (GLONASS) или т.п.
Фиг.3 - структурная схема, иллюстрирующая операции для определения решения установления географического местоположения станции MS 104. На фиг.3, операции 310-312 выполняются для того, чтобы определить предварительное местоположение 302, а операции 330-332 выполняются для того, чтобы определить окончательное местоположение 304. Для того чтобы определить предварительное местоположение 302, функционирование начинается в блоке 310, где в MS производятся измерения фазы пилот-сигнала. Функционирование продолжается в блоке 312, где, используя измерения фазы пилот-сигнала, сделанные в MS, и другие сетевые измерения, решение о местоположении MS 104 разрешается в устройстве установления местоположения, которое включает в себя механизм установления местоположения. Механизм установления местоположения может находиться в любом устройстве, которое связывается с сетью. Например, механизм установления местоположения может находиться в MS, в сервере, подключенном к сети, или в другом удаленном модуле.
Процесс продолжается в блоке 314, где определяется, было ли вычисленное решение о местоположении решением на основе улучшенной трилатерации прямой линии связи (AFLT), т.е. решением, основанным на измерениях фазы пилот-сигнала, или решение было основано на других сетевых измерениях. Как правило, решение о местоположении, основанное на AFLT, является более точным, нежели решение о местоположении, основанное на других сетевых измерениях, например информации об обслуживающей соте. Предварительное местоположение MS может быть использовано для того, чтобы сформировать вспомогательные данные слежения, используемые MS в совершении будущих измерений. В зависимости от типа информации, используемой при определении решения о местоположении MS, могут быть сформированы различные наборы вспомогательных данных слежения. Например, если MS имеет GPS приемник, вспомогательные данные слежения могут включать в себя приблизительные фазовые измерения и доплеровский сдвиг спутниковых сигналов GPS, которые будет принимать MS.
В блоке 314, если решение о местоположении MS основано на AFLT, процесс продолжается в блоке 315. В блоке 315 определяется, существуют ли дополнительные доступные сетевые измерения для того, чтобы использовать их при формировании вспомогательных данных слежения. Если дополнительных сетевых измерений нет, отрицательный результат подается на блок 315, процесс продолжается в блоке 316. В блоке 316 формируется набор сфокусированных вспомогательных данных слежения, используя AFLT-решение. Вспомогательные данные слежения могут быть сформированы, например, используя 4-мерную ковариационную матрицу.
Возвращаясь к блоку 315, если дополнительные сетевые измерения доступны, процесс продолжается в блоке 317. В блоке 314 вспомогательные данные слежения могут быть сформированы как с использованием AFLT-решения, например, ковариационной AFLT-матрицы, так и с использованием дополнительных сетевых измерений. Затем два различных набора вспомогательных данных слежения могут быть объединены для того, чтобы создать окончательный набор вспомогательных данных слежения для подвижного объекта. Например, комбинация может быть выбрана как пересечение фазовых окон вспомогательных данных слежения и/или доплеровских окон для каждого спутника. Альтернативно, комбинация может быть выбрана как среднее фазовых окон вспомогательных данных слежения и/или доплеровских окон для каждого спутника.
Возвращаясь к блоку 314, если решение о местоположении MS не основано на AFLT, процесс продолжается в блоке 318. В блоке 318, поскольку решение о местоположении MS не основано на AFLT, вычисление решения о местоположении рассматривается недостаточно точным, так что набор менее фокусированных вспомогательных данных слежения формируется так, чтобы рассчитать эту неточность. Например, менее фокусированные вспомогательные данные слежения могут быть основаны на сетевых измерениях, отличных от AFLT, например, данных сектора обслуживающей соты, RTD, АОА или ТОА. Процесс из блоков 316 и 318 продолжается в блоке 320, где вспомогательные данные слежения передаются в MS 104.
При установлении окончательного местоположения 304 в блоке 330 MS использует вспомогательные данные слежения и производит окончательные измерения. Например, если MS 104 имеет GPS-приемник, MS может использовать вспомогательные данные слежения для того, чтобы измерить GPS-сигналы. Окончательные измерения передаются в устройство установления местоположения. Процесс продолжается в блоке 332, где, используя окончательные измерения и любые другие доступные измерения, определяется решение о местоположении MS104. Процесс продолжается в блоке 334, где производится окончательное решение о местоположении MS.
Фиг.4 иллюстрирует дополнительные подробности способа определения решения о местоположении MS 104. Функционирование начинается в блоке 402, где в MS 104 делается набор предварительных измерений и передается в сеть. Процесс продолжается в блоках 404 и 406, где установление предварительного местоположения формируется механизмом установления местоположения, который может быть частью любого устройства, которое связывается с сетью. Механизм установления местоположения может быть предоставлен, например, функционирующим программным обеспечением на сервере, подключенном к сетевой инфраструктуре, или может быть предоставлен функционирующим программным обеспечением в MS104.
В блоке 404 первоначальное грубое предварительное местоположение определяется, используя смешанные измерения сотовой сети. Например, первоначальное грубое предварительное местоположение может быть определено на основании идентификации базовых станций или сот, с которыми соединена MS; местоположение может быть определено на основании измерений уровня мощности сигналов, принятых от MS; или на основании RTD. В блоке 406 производится примерное более точное установление предварительного местоположения на основании дополнительных сетевых и несетевых измерений. Например, предварительное предположительное местоположение может быть определено на основании измерений фазы пилот-сигналов, переданных между MS 104 и базовыми станциями 102 и 104 в сети. В дополнение, установление предположительного предварительного местоположения может быть основано на спутниковых сигналах, например, GPS, измеренных MS.
После определения первоначального грубого и предположительного предварительного местоположения процесс продолжается в блоке 408. В блоке 408 выбирается либо первоначальное грубое, либо предположительно предварительное решение о местоположении и используется в качестве входных данных для операции, которая формирует вспомогательные данные слежения. Выбор между решениями первоначального грубого и предположительного предварительного решения о местоположении может быть основан на показателях качества в отношении точности предварительных решений о местоположении. Например, выбор может быть основан на горизонтальной ошибке расчетного местоположения (НЕРЕ), показателе качества автономного контроля ошибки работы приемника (RAIM), геометрическом показателе снижения точности (GDOP), показателе снижения точности установления местоположения (PDOP), горизонтальном показателе снижения точности (HDOP), взвешенных DOP, ошибках решающего устройства, измерении остаточных величин и других способах ранжирования двух предварительных решений о местоположении. Выходные данные процесса предварительного выбора также могут быть средневзвешенным от первоначального грубого и предположительного предварительного решения о местоположении, что предпочтительнее, чем выбор одного или другого. Используя предварительное решение о местоположении, формируются вспомогательные данные слежения, такие как окно поиска GPS и доплеровские оценки. Функционирование блока 408 продолжается, когда вспомогательные данные слежения передаются в MS 104.
Процесс продолжается в блоке 412 с тем, чтобы рассчитать окончательное местоположение. В блоке 412 MS 104, используя вспомогательные данные слежения, собирают данные о местоположении. Например, MS 104 может собирать данные из GPS-сигналов. Окончательные данные передаются в механизм установления местоположения. Процесс продолжается в блоках 414 и 416, где, используя данные окончательного установления местонахождения и любые другие доступные данные, механизм установления местонахождения определяет решение о местоположении MS 104. В блоке 414 устанавливается грубое окончательное местоположение.
В типичном варианте, способ окончательного грубого решения о местоположении является выходным для предварительного местоположения из блока 408, но окончательное грубое решение о местоположении может быть дополнено дополнительными сетевыми измерениями. Например, может быть использована дополнительная идентификация базовых станций станцией MS для того, чтобы уточнить окончательное грубое решение о местоположении. В блоке 416 определяется окончательное предположительно более точное решение о местоположении на основании дополнительных сетевых и несетевых измерений. Например, окончательное предположительно более точное решение о местоположении может быть определено на основании GPS-сигналов или дополнительных контрольных измерений фазы. Кроме того, окончательное предположительно более точное решение о местоположении может быть гибридным решением, в котором сетевые и несетевые измерения объединены для того, чтобы установить окончательное решение о местоположении.
Определение того, является ли окончательное предположительно более точное решение о местоположении основанным на несетевых измерениях, т.е. на GPS, или основанным на гибридном способе, т.е. на GPS и сетевых измерениях, может быть основано на анализе качества соответствующих измерений. Например, если только несетевое окончательное предположительно более точное решение о местоположении имеет расчетную ошибку выше предопределенного значения, то следует предпочесть гибридный способ.
Предопределенное значение выбора может быть использовано для того, чтобы сместить определение способа установления окончательного предположительного местоположения в сторону предпочтительного типа способов, например, между несетевым и гибридным способами. Другими словами, величина предопределенного значения выбора сможет гарантировать, что решение предпочтительного типа будет использоваться для получения решения о местоположении в большинстве ситуаций. Например, если выбор между несетевым и гибридным решениями основан на величине расчетной ошибки несетевого решения, которая должна быть меньше предопределенного значения выбора, то использование большей величины для предопределенного значения выбора сместит выбор в пользу несетевого решения. Наоборот, меньшая величина для предопределенного значения выбора сместит выбор в пользу гибридного решения.
Например, горизонтальная оценка ошибки при определении местоположения (НЕРЕ) решения о местоположении может быть оценена для того, чтобы выбрать между несетевым решением и гибридным решением для окончательного предположительно более точного решения о местоположении. Следует обосновать, что если несетевое решение является GPS-решением, то использование GPS-решения, если оно имеет ошибку НЕРЕ 500 метров или меньше, обеспечивает хорошие результаты. Вообще, если GPS-решение разумного качества возможно везде, то оно будет иметь НЕРЕ меньше 500 метров. Таким образом, использование НЕРЕ со значением 500 метров для предопределенного значения выбора будет смещать выбор в пользу выбора GPS-решения.
Другая методика для выбора между исключительно GPS- решением и гибридным решением может быть основана на НЕРЕ GPS-решения и НЕРЕ решения грубого окончательного о местоположении. Например, если GPS-решение имеет НЕРЕ меньшее чем предопределенное значение выбора и меньшее чем НЕРЕ грубого окончательного о местоположении, то выбор будет таким, чтобы использовать исключительно GPS-решение, в противном случае выбор будет таким, чтобы использовать гибридное решение. В этом примере, если предопределенное значение выбора является НЕРЕ со значением 500 метров, то используется исключительно GPS-решение, если НЕРЕ GPS-решения меньше 500 метров и меньше НЕРЕ грубого окончательного о местоположении, в противном случае используется гибридное решение.
Процесс продолжается от блоков 414 и 416 в блок 418, где происходит выбор между решениями грубого и предположительного окончательного о местоположении. Выбор между решениями грубого и окончательного предположительно более точного решения о местоположении может быть основан на показателях качества каждого из решений. Например, выбор между решениями грубого и окончательного предположительно более точного решения о местоположении может быть основан на том, какой из способов имеет меньшую НЕРЕ. Кроме того, решения грубого и окончательного предположительно более точного решения о местоположении могут быть объединены, например, как средневзвешенное, для того, чтобы задать окончательное решение о местоположении. После выбора окончательного решения о местоположении процесс продолжается в блоке 420, где выводится окончательное местоположение.
Фиг.5 показывает дополнительные аспекты установления географического местоположения MS 104 и применимость обоих предварительного и окончательного решений о местоположении, описанных выше. Процесс начинается в блоке 502, где MS 104 делает измерения. Примеры типов измерений, которые производит MS 104, включают в себя измерения фазы пилот-сигнала, идентификацию базовой станции и GPS-измерения. Измерения, сделанные MS 104, могут быть использованы самой MS или могут быть переданы базовой станции, другой MS или любому устройству внутри инфраструктуры сети.
Процесс продолжается в блоке 504, где измерения используются механизмом установления местоположения для того, чтобы вычислить исходное местоположение MS 104. Вычисление исходного местоположения MS может быть основано на измерениях, принятых от MS 104, других сетевых измерениях или комбинации различных измерений. При установлении исходного местоположения MS 104 может быть выполнено исходное допущение о местоположении MS 104. Например, исходное местоположение MS 104 может быть взято из предыдущего местоположения MS 104. Альтернативно, исходное местоположение может быть установлено известной географической областью покрытия элементов сети, находящихся в соединении с MS 104. Разности между фактическими и расчетными значениями затем могут быть использованы для того, чтобы обновлять расчеты местоположения.
Разности могут быть выведены из различных «итерационных» решателей, например среднеквадратичных значений, включая контрольное перевзвешивание, ортогонали, ограничение дельты вектора, а также алгебраических решателей. Примеры некоторых технологий для установления местоположения MS, основанные на оценке исходного грубого местоположения от MS, которая выводится на основании первоначальной оценки местоположения MS, описаны в американском патенте 6570530, озаглавленном «METHOD AND APPARATUS PROVIDING IMPROVED POSITION ESTIMATE BASED ON AN INITIAL COARSE POSITION ESTIMATE», выданном 27 мая 2003 года на имя заявителя этой заявки.
Исходное местоположение, вычисленное в блоке 504, одновременно предоставляется процессу блока 506 выбора местоположения и процессу блока 508 принятия решения. Блок 506 выбора принимает решение установления исходного местоположения для дальнейшего сравнения с альтернативными решениями о местоположении, как описано ниже. В блоке 508 определяется, сколько GPS-измерений доступно. Если нет доступных GPS-измерений, то процесс продолжается в блоке 510. В блоке 510 определяется, сколько AFLT-измерений доступно. Если нет доступных AELT-измерений, то процесс продолжается в блоке 512. В блоке 512 определяется, доступны ли RTD-измерения. Если нет доступных RTD-измерений, то процесс продолжается в блоке 506.
Возвращаясь к блоку 512, в который входит информация об отсутствии доступных GPS- и AFLT-измерений, если есть доступные RTD-измерения, то процесс продолжается в блоке 516. В блоке 516 вычисляется местоположение в «сетке безопасности» на основании RTD-измерений. Местоположение MS, вычисленное с помощью RTD, выводится из блока 516 и вводится в блок 506 выбора местоположения.
Возвращаясь к блоку 510, в который входит информация об отсутствии доступных GPS-измерений, определяется, существуют ли любые доступные AFLT-измерения. Если есть, по меньшей мере, одно доступное AFLT-измерение, процесс продолжается в блоке 518. В блоке 518 вычисляется местоположение MS, используя, по меньшей мере, одно AFLT-измерение. Местоположение MS, вычисленное с помощью AFLT, выводится из блока 518 и вводится в блок 506 выбора местоположения.
Возвращаясь к блоку 508, в который входит информация о доступных GPS-измерениях, если есть одно или два доступных GPS-измерения, процесс продолжается в блоке 520. В блоке 520 определяется, существуют ли любые доступные AFLT-измерения. Если доступных AFLT-измерений нет, выводится «0» в качестве результата, затем работа продолжается в блоке 506 выбора местоположения. Если в блоке 520 определяется, что существует доступное, по меньшей мере, одно AFLT-измерение, то процесс продолжается в блоке 522. В блоке 522 AFLT- и GPS-измерения объединяются для вычисления гибридного местоположения MS 104. Гибридное решение о местоположении вводится в блок 506 выбора местоположения.
Возвращаясь к блоку 508, если определяется, что доступно, по меньшей мере, три GPS-измерения, то процесс продолжается в блоке 524. В блоке 524 GPS-измерения используются для вычисления местоположения MS. Процесс затем продолжается в блоке 526. В блоке 526 определяется, являются ли вычисления местоположения только по GPS достаточно точными или требуется выполнить дополнительную обработку для того, чтобы определить местоположение MS 104. Например, в блоке 526 НЕРЕ GPS-вычислений может сравниваться с предопределенным значением для того, чтобы решить, являются ли GPS-измерения достаточно точными. Кроме того, могут быть использованы другие параметры для того, чтобы оценить, является ли GPS-способ достаточно точным, например, интенсивность сигнала принятых GPS-сигналов, относительное местоположение GPS-спутников, геометрический показатель снижения точности (GDOP), показатель снижения точности определения местоположения (PDOP), горизонтальный показатель снижения точности (HDOP), взвешенные DOP, ошибка решающего устройства и величины остаточных измерений.
Если определено, что GPS-измерения достаточно точны, «Да» выходит из блока 526 и передается в блок 506 выбора местоположения. Если GPS-измерения недостаточно точны, выходит «Нет» и затем процесс продолжается в блоке 520.
Как замечено выше, в блоке 520 определяется, доступны ли какие-нибудь AFLT-измерения. Если доступных AFLT-измерений нет, то GPS-местоположение, вычисленное в блоке 522, вводится в блок 506 выбора местоположения. Если в блоке 520 определяется, что доступно, по меньшей мере, одно AFLT-измерение, то процесс продолжается в блоке 522, где AFLT- и GPS-измерения объединяются для вычисления гибридного местоположения MS. Гибридное решение о местоположении вводится в блок 506 выбора местоположения.
В блоке 506 выбора все решения о местоположении, которые были вычислены для MS 104, оцениваются и выбирается требуемое решение о местоположении. Оценка различных решений о местоположении может быть основана на относительных показателях качества решений, например, НЕРЕ каждого измерения. Выбор требуемого решения может также смещаться в пользу решения предпочтительного типа. Например, если исключительно GPS-решение является предпочтительным, то предопределенное значение выбора местоположения может сравниваться с НЕРЕ GPS-решения, и до тех пор, пока НЕРЕ GPS-решения меньше, чем предопределенное значение выбора местоположения, будет выбираться GPS-решение. Предопределенное значение выбора местоположения может быть выбрано так, чтобы GPS-решение использовалось в большинстве случаев.
Другой пример - это выбор GPS-решения до тех пор, пока его НЕРЕ не станет больше на предопределенную величину, чем НЕРЕ решений другого типа, например более чем на 30% или 50%. Также могут быть использованы другие технологии выбора, например выбор GPS-решения, если его НЕРЕ меньше предопределенного значения и меньше, чем НЕРЕ решения установления исходного местоположения. После выбора требуемого решения о местоположении процесс продолжается в блоке 530 и выводится выбранное местоположение.
Как замечено выше, в одном варианте осуществления, предварительное решение о местоположении удаленного устройства определяется, используя, по меньшей мере, два типа решений о местоположении. Затем определяется примерная ошибка для каждого из предварительных решений о местоположении. Выбор требуемого предварительного решения о местоположении основан на показателях качества соответствующих решений о местоположении. Окончательное решение о местоположении удаленного устройства определяется с использованием, по меньшей мере, одного из решений о местоположении и выбранного предварительного решения о местоположении. Требуемое окончательное решение о местоположении выбирается как географическое местоположение удаленного устройства на основании соответствующих примерных ошибок требуемого предварительного решения о местоположении и окончательного решения о местоположении.
Предварительное решение о местоположении может включать в себя использование данных о местоположении секторов смежных сот и улучшенные данные трилатерации прямой линии связи. Выбор требуемого предварительного решения о местоположении может включать в себя оценку горизонтальной ошибки расчетного местоположения решения, определение средневзвешенного исходного решения или определение безотказности решения методиками, например, RAIM.
Окончательное решение о местоположении может включать в себя использование систем несетевого измерения, например спутниковой измерительной системы, подобной глобальной системе позиционирования, системе GLONASS, системе Галилей и подобным. Выбор требуемого окончательного решения о местоположении может включать в себя оценку горизонтальной ошибки расчетного местоположения решений, определение средневзвешенного исходных решений или определение безотказности решения с технологиями, например, RAIM.
Удаленное устройство включает в себя приемник, предназначенный для приема сигналов от инфраструктуры беспроводной сети, и передатчик, предназначенный для передачи сигналов в инфраструктуру беспроводной сети. Удаленное устройство также включает в себя контроллер, предназначенный для обработки сигналов, принятых от беспроводной сети, и сбора данных, используемых для определения решения о местоположении. Собранные данные передаются в беспроводную сеть, другому удаленному устройству или другому устройству, где определяется решение о местоположении. Удаленное устройство включает в себя навигационный приемник, например приемник глобальной системы позиционирования, предназначенный для обработки несетевых сигналов и сбора данных, используемых в определении решения о местоположении. Собранные данные передаются в беспроводную сеть, другому удаленному устройству или другому устройству, где определяется решение о местоположении.
Устройство о местоположении в системе беспроводной связи предназначено для приема сигналов от удаленного устройства, включая данные, полученные из сетевых сигналов и несетевых сигналов, для того, чтобы использовать их при определении решения о местоположении. Устройство обрабатывает данные так, чтобы определить, по меньшей мере, два решения о местоположении, и затем выбирает требуемое решение о местоположении на основании соответствующих показателей качества решений о местоположении. В одном варианте осуществления механизм установления местоположения обрабатывает данные так, чтобы определить решение о местоположении.
Устройство установления местоположения также может формировать вспомогательные данные слежения на основании решения о местоположении, обрабатываемого с использованием сетевых данных, и передавать вспомогательные данные слежения удаленному устройству для использования удаленным устройством при обработке несетевых сигналов. Например, вспомогательные данные слежения могут помочь удаленному устройству при обработке сигналов глобальной системы позиционирования.
Устройство установления местоположения также может определить предварительное решение о местоположении и окончательное решение о местоположении и выбрать требуемое окончательное решение как географическое местоположение удаленного устройства на основании соответствующих расчетных ошибок решений о местоположении.
В данном документе информация и сигналы могут быть представлены с использованием любой из разнообразия различных технологий и методик. Например, напряжения, токи, электромагнитные волны, магнитные поля и частицы, оптические поля, частицы или любая их комбинация могут представлять данные, инструкции, информацию и сигналы, описанные выше.
Кроме того, различные иллюстративные логические блоки, модули, схемы и этапы алгоритма, описанные в связи с раскрытыми в данном документе вариантами осуществления, могут быть реализованы как электронные аппаратные средства, вычислительное программное обеспечение либо их сочетания. Чтобы понятно проиллюстрировать эту взаимозаменяемость аппаратных средств и программного обеспечения, различные иллюстративные компоненты, блоки, модули, схемы и этапы описаны выше в целом на основе их функциональности. Реализована ли эта функциональность в качестве аппаратных средств или программного обеспечения, зависит от конкретного варианта применения и структурных ограничений, накладываемых на систему в целом.
Различные иллюстративные логические блоки, модули и схемы, описанные в связи с раскрытыми в данном документе вариантами осуществления, могут быть реализованы или выполнены с помощью процессора общего назначения, цифрового сигнального процессора (DSP), специализированной интегральной схемы (ASIC), программируемой пользователем матричной БИС (FPGA) или другого программируемого логического устройства, дискретного логического элемента или транзисторной логики, дискретных компонентов аппаратных средств или любого их сочетания, предназначенного, чтобы выполнять описанные в данном документе функции. Процессором общего назначения может быть микропроцессор, но в альтернативном варианте процессором может быть любой традиционный процессор, контроллер, микроконтроллер или конечный автомат. Процессор также может быть реализован как сочетание вычислительных устройств, к примеру сочетание DSP и микропроцессора, множество микропроцессоров, один или более микропроцессоров вместе с ядром DSP либо любая другая подобная конфигурация.
Способы или методики, описанные в связи с раскрытыми в данном документе вариантами осуществления, могут быть реализованы непосредственно в аппаратных средствах, в программном модуле, приводимом в исполнение процессором, или в их сочетании. Программный модуль может постоянно размещаться в оперативной памяти, флэш-памяти, ПЗУ, памяти типа EPROM, памяти типа EEPROM, регистрах, на жестком диске, сменном диске, компакт-диске или любой другой форме носителя хранения данных. Типичный носитель хранения данных сконфигурирован так, чтобы процессор мог считывать информацию и записывать информацию на носитель хранения данных. В альтернативном варианте носитель хранения данных может быть встроен в процессор. Процессор и носитель хранения данных могут постоянно размещаться в ASIC. ASIC может постоянно размещаться в пользовательском терминале. В альтернативном варианте процессор и носитель хранения данных могут постоянно размещаться как дискретные компоненты в пользовательском терминале.
Изобретение относится к технике навигации подвижных объектов. Предложены способы и устройства установления местоположения мобильной станции в системе беспроводной связи. Используются наземные или сетевые базовые станции, а также и несетевые станции, в частности спутники. Установление местоположения удаленного мобильного устройства осуществляется на основании показателей качества различных решений при установлении местоположения в окружающей среде. Имеющийся выбор подхода к решению о местоположении предопределяет повышенную точность определения местоположения. 7 н. и 94 з.п. ф-лы, 5 ил.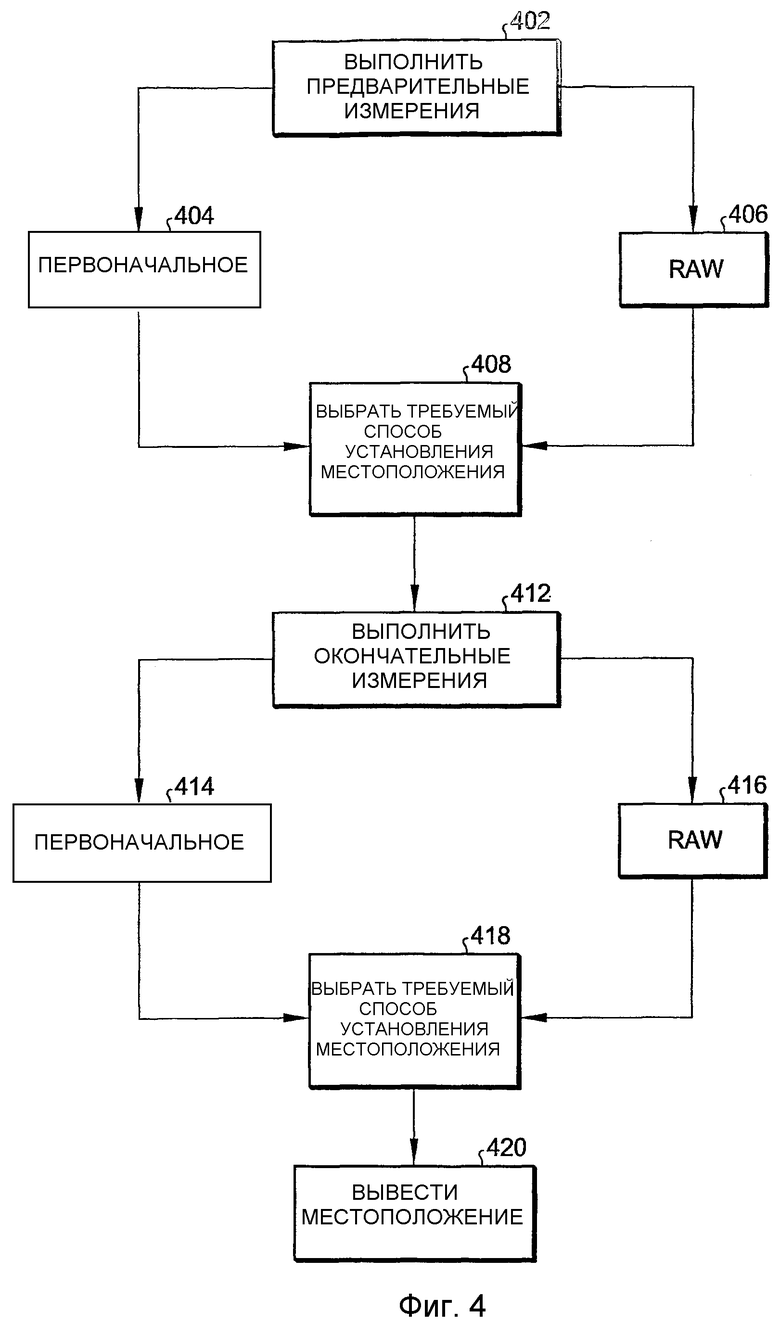
1. Способ установления географического местоположения удаленного устройства в системе беспроводной связи, содержащий этапы, на которых:
определяют первое решение о местоположении удаленного устройства, используя первый набор данных о местоположении;
определяют второе решение о местоположении удаленного устройства, используя второй набор данных о местоположении; и
выбирают между первым решением о местоположении и вторым решением о местоположении на основании предопределенного критерия выбора, причем первое решение о местоположении и второе решение о местоположении основываются на различных измерениях.
2. Способ по п.1, в котором первый набор данных о местоположении включает в себя сетевые измерения.
3. Способ по п.2, в котором сетевые измерения включают в себя измерения фазы пилот-сигнала.
4. Способ по п.2, в котором сетевые измерения включают в себя измерение задержки полного прохождения сигнала.
5. Способ по п.2, в котором сетевые измерения включают в себя измерение угла прихода сигнала.
6. Способ по п.2, в котором сетевые измерения включают в себя измерение времени прихода сигнала.
7. Способ по п.2 включает в себя измерение временной разности прихода сигнала.
8. Способ по п.1, в котором второй набор данных о местоположении включает в себя несетевые измерения.
9. Способ по п.8, в котором несетевые измерения включают в себя спутниковые измерения.
10. Способ по п.8, в котором несетевые измерения включают в себя измерения глобальной системы позиционирования.
11. Способ по п.8, в котором несетевые измерения включают в себя измерения геометрического показателя снижения точности.
12. Способ по п.8, в котором несетевые измерения включают в себя измерения показателя снижения точности установления местоположения.
13. Способ по п.8, в котором несетевые измерения включают в себя измерения горизонтального показателя снижения точности.
14. Способ по п.8, в котором несетевые измерения включают в себя измерения взвешенного показателя снижения точности.
15. Способ по п.8, в котором несетевые измерения включают в себя измерения ошибки решающего устройства.
16. Способ по п.8, в котором несетевые измерения включают в себя измерения остаточных величин.
17. Способ по п.1, в котором выбор между первым решением о местоположении и вторым решением о местоположении включает в себя этап, на котором сравнивают соответствующие показатели качества двух решений о местоположении.
18. Способ по п.1, в котором сравнение включает в себя этап, на котором вычисляют относительную ошибку горизонтальной оценки местоположения.
19. Способ по п.18, в котором сравнение включает в себя этап, на котором вычисляют относительную ошибку геометрического показателя снижения точности.
20. Способ по п.18, в котором сравнение включает в себя этап, на котором вычисляют относительную ошибку показателя снижения точности установления местоположения.
21. Способ по п.18, в котором сравнение включает в себя этап, на котором вычисляют относительную ошибку горизонтального показателя снижения точности.
22. Способ по п.18, в котором сравнение включает в себя этап, на котором вычисляют относительную ошибку взвешенного показателя снижения точности.
23. Способ по п.18, в котором сравнение включает в себя этап, на котором вычисляют относительную величину сбоев ошибок решений.
24. Способ по п.18, в котором сравнение включает в себя этап, на котором вычисляют относительные величины остаточных измерений.
25. Способ по п.9, в котором сравнение смещается в пользу одного из решений о местоположении.
26. Способ по п.25, в котором сравнение смещается в пользу одного из решений о местоположении до тех пор, пока размер ошибки другого местоположения меньше порогового значения, в противном случае выбирается другое решение о местоположении.
27. Способ по п.26, в котором предпочтенное решение о местоположении представляет собой решение о местоположении с помощью глобальной системы позиционирования.
28. Способ по п.1, в котором удаленным устройством является мобильная станция.
29. Способ установления географического местоположения удаленного устройства в системе беспроводной связи, содержащий этапы, на которых:
определяют предварительное решение о местоположении удаленного устройства для каждого из, по меньшей мере, двух типов решений измерения местоположения;
выбирают требуемое одно из предварительных решений о местоположении на основе показателей качества соответствующих решений о местоположении;
определяют окончательное решение о местоположении удаленного устройства с использованием, по меньшей мере, одного из типов решений измерения местоположения и выбранного предварительного решения о местоположении; и
выбирают требуемое окончательное решение о местоположении как географическое местоположение удаленного устройства на основании соответствующих показателей качества требуемых предварительного решения о местоположении и окончательного решения о местоположении.
30. Способ по п.29, в котором определение предварительного решения о местоположении включает в себя этап, на котором используют смешанные данные местоположения секторов сотовых ячеек.
31. Способ по п.29, в котором определение предварительного решения о местоположении использует улучшенную трилатерацию прямой линии связи.
32. Способ по п.29, в котором определение требуемого предварительного решения о местоположении включает в себя этап, на котором вычисляют горизонтальную ошибку расчетного местоположения решений.
33. Способ по п.29, в котором выбор требуемого предварительного решения о местоположении включает в себя этап, на котором определяют средневзвешенное исходного решения.
34. Способ по п.29, в котором выбор требуемого предварительного решения о местоположении включает в себя этап, на котором определяют показатель качества автономного контроля ошибки работы приемника.
35. Способ по п.29, в котором выбор требуемого предварительного решения о местоположении включает в себя этап, на котором вычисляют относительную ошибку геометрического показателя снижения точности решений.
36. Способ по п.29, в котором выбор требуемого предварительного решения о местоположении включает в себя этап, на котором вычисляют относительную ошибку показателя снижения точности решений.
37. Способ по п.29, в котором выбор требуемого предварительного решения о местоположении включает в себя этап, на котором вычисляют относительную ошибку горизонтального показателя снижения точности решений.
38. Способ по п.29, в котором выбор требуемого предварительного решения о местоположении включает в себя этап, на котором вычисляют относительную ошибку взвешенного показателя снижения точности решений.
39. Способ по п.29, в котором выбор требуемого предварительного решения о местоположении включает в себя этап, на котором вычисляют относительную величину сбоев решений.
40. Способ по п.29, в котором выбор требуемого предварительного решения о местоположении включает в себя этап, на котором вычисляют относительные остаточные величины решений.
41. Способ по п.29, в котором определение требуемого окончательного решения о местоположении включает в себя этап, на котором используют измерения сигналов самой системы связи.
42. Способ по п.41, в котором определение окончательного решения о местоположении включает в себя этап, на котором используют данные о местоположении улучшенной трилатерации прямой линии связи.
43. Способ по п.41, в котором определение окончательного решения о местоположении включает в себя этап, на котором используют смешанные данные о местоположении секторов сотовых ячеек.
44. Способ по п.41, в котором определение окончательного решения о местоположении включает в себя этап, на котором используют данные о местоположении задержки полного прохождения сигнала.
45. Способ по п.29, в котором определение окончательного решения о местоположении включает в себя этап, на котором используют системы несетевых измерений.
46. Способ по п.45, в котором система несетевых измерений включает в себя систему спутниковых измерений.
47. Способ по п.46, в котором система спутниковых измерений включает в себя глобальную систему позиционирования.
48. Способ по п.46, в котором система спутниковых измерений включает в себя систему ГЛОНАСС.
49. Способ по п.46, в котором система спутниковых измерений включает в себя систему «Галилей».
50. Способ по п.29, в котором выбор требуемого окончательного решения о местоположении включает в себя этап, на котором вычисляют горизонтальную ошибку расчетного местоположения решений.
51. Способ по п.29, в котором определение требуемого окончательного решения о местоположении включает в себя этап, на котором вычисляют ошибку геометрического показателя снижения точности решений.
52. Способ по п.29, в котором выбор требуемого окончательного решения о местоположении включает в себя этап, на котором вычисляют относительную ошибку показателя снижения точности определения местоположения решений.
53. Способ по п.29, в котором выбор требуемого окончательного решения о местоположении включает в себя этап, на котором вычисляют относительную ошибку горизонтального показателя снижения точности решений.
54. Способ по п.29, в котором выбор требуемого окончательного решения о местоположении включает в себя этап, на котором вычисляют относительную величину сбоев решений.
55. Способ по п.29, в котором выбор требуемого окончательного решения о местоположении включает в себя этап, на котором вычисляют относительные остаточные величины решений.
56. Способ по п.29, в котором выбор требуемого окончательного решения о местоположении включает в себя этап, на котором определяют средневзвешенное окончательных решений о местоположении.
57. Способ по п.29, в котором выбор требуемого окончательного решения о местоположении включает в себя этап, на котором определяют показатель автономного контроля ошибки работы приемника.
58. Способ по п.29, в котором удаленным устройством является мобильная станция.
59. Способ установления географического местоположения удаленного устройства в системе беспроводной связи, содержащий этапы, на которых:
определяют первое решение о местоположении на основе сетевых измерений смешанных сот;
определяют второе решение о местоположении на основе измерения фазы пилот-сигнала;
выбирают предварительное решение о местоположении из первого решения о местоположении и второго решения о местоположении; и
формируют вспомогательные данные слежения на основе выбранного предварительного решения о местоположении.
60. Способ по п.59, дополнительно содержащий этапы, на которых:
принимают сигналы глобальной системы позиционирования, используя вспомогательные данные слежения;
определяют третье решение о местоположении, используя сетевые измерения;
определяют четвертое решение о местоположении, используя измерения глобальной системы позиционирования, обработанные с помощью вспомогательных данных слежения; и
выбирают согласно предопределенному критерию выбора между третьим решением о местоположении и четвертым решением о местоположении в качестве географического местоположения удаленного устройства.
61. Способ по п.60, в котором выбор между третьим решением о местоположении и четвертым решением о местоположении включает в себя этап, на котором сравнивают соответствующие показатели качества двух решений.
62. Способ по п.61, в котором сравнение включает в себя этап, на котором вычисляют соответствующую ошибку горизонтальной оценки местоположения двух решений.
63. Способ по п.61, в котором сравнение сдвигается в пользу одного из решений о местоположении.
64. Способ по п.61, в котором сравнение смещается в пользу одного из решений о местоположении, используя измерения глобальной системы позиционирования.
65. Способ по п.59, в котором выбор между первым решением о местоположении и вторым решением о местоположении включает в себя этап, на котором сравнивают соответствующие показатели качества двух решений.
66. Способ по п.65, в котором сравнение включает в себя этап, на котором вычисляют соответствующую ошибку горизонтальной оценки местоположения двух решений.
67. Способ по п.65, в котором сравнение включает в себя этап, на котором вычисляют соответствующий геометрический показатель снижения точности двух решений.
68. Способ по п.65, в котором сравнение включает в себя этап, на котором вычисляют соответствующую ошибку геометрического показателя снижения точности двух решений.
69. Способ по п.65, в котором сравнение включает в себя этап, на котором оценивают соответствующую ошибку горизонтального показателя снижения точности двух решений.
70. Способ по п.65, в котором сравнение включает в себя этап, на котором вычисляют соответствующую величину сбоев двух решений.
71. Способ по п.65, в котором сравнение включает в себя этап, на котором вычисляют соответствующую величину двух решений.
72. Способ по п.65, в котором удаленным устройством является мобильная станция.
73. Устройство установления местоположения в системе беспроводной связи, содержащее:
механизм установления местоположения для того, чтобы принимать данные, полученные из сетевых сигналов и несетевых сигналов, и обрабатывать данные так, чтобы определить, по меньшей мере, два решения о местоположении, причем первое решение о местоположении и второе решение о местоположении основываются на различных измерениях; и
контроллер для того, чтобы выбирать требуемое решение о местоположении на основании соответствующих показателей качества решений о местоположении.
74. Устройство по п.73, в котором контроллер дополнительно включает в себя механизм установления местоположения.
75. Устройство по п.73, в котором контроллер дополнительно включает в себя формирование вспомогательных данных слежения на основании решения о местоположении, обработанного с использованием сетевых данных, причем вспомогательные данные слежения используются удаленным устройством при обработке несетевых сигналов.
76. Устройство по п.73, в котором вспомогательные данные слежения формируются с использованием ковариационной матрицы улучшенной трилатерации прямой линии связи.
77. Устройство по п.75, в котором вспомогательные данные слежения формируются с использованием данных о секторе сотовой ячейки.
78. Устройство по п.75, в котором вспомогательные данные слежения формируются с использованием данных о задержке полного прохождения сигнала.
79. Устройство по п.75, в котором вспомогательные данные слежения формируются с использованием данных об угле прихода сигнала.
80. Устройство по п.75, в котором вспомогательные данные слежения формируются с использованием данных о времени прихода сигнала.
81. Устройство по п.75, дополнительно включающее в себя формирование двух наборов вспомогательных данных слежения.
82. Устройство по п.81, в котором первый из двух наборов данных слежения формируется с использованием ковариационной матрицы улучшенной трилатерации прямой линии связи, а второй из двух наборов данных слежения формируется с использованием дополнительных сетевых данных.
83. Устройство по п.82, в котором два набора вспомогательных данных слежения объединяются для того, чтобы сформировать окончательный набор вспомогательных данных слежения.
84. Устройство по п.83, в котором объединение выбирается как пересечение фазовых окон вспомогательных данных слежения для спутникового сигнала глобальной системы позиционирования.
85. Устройство по п.83, в котором объединение выбирается как пересечение доплеровских окон вспомогательных данных слежения для спутникового сигнала глобальной системы позиционирования.
86. Устройство по п.83, в котором объединение выбирается как пересечение фазовых окон и доплеровских окон вспомогательных данных слежения для спутникового сигнала глобальной системы позиционирования.
87. Устройство по п.83, в котором объединение выбирается как среднее фазовых окон вспомогательных данных слежения для спутникового сигнала глобальной системы позиционирования.
88. Устройство по п.83, в котором объединение выбирается как среднее доплеровских окон вспомогательных данных слежения для спутникового сигнала глобальной системы позиционирования.
89. Устройство по п.83, в котором объединение выбирается как среднее фазовых окон и доплеровских окон вспомогательных данных слежения для спутникового сигнала глобальной системы позиционирования.
90. Устройство по п.75, в котором вспомогательные данные слежения помогают удаленному устройству в обработке сигналов глобальной системы позиционирования.
91. Устройство по п.73, в котором данные из несетевых сигналов включают в себя сигналы глобальной системы позиционирования.
92. Устройство по п.73, в котором данные из сетевых сигналов включают в себя измерения фазы пилот-сигнала.
93. Устройство по п.73, в котором устройство установления местоположения включено в состав базовой станции.
94. Устройство по п.67, в котором устройство установления местоположения включено в состав инфраструктуры беспроводной сети.
95. Устройство по п.73, в котором устройство установления местоположения включено в состав удаленного устройства.
96. Устройство установления местоположения в системе беспроводной связи, содержащее:
механизм установления местоположения для того, чтобы обрабатывать данные от удаленного устройства и определять предварительное решение о местоположении и окончательное решение о местоположении; и
контроллер для того, чтобы выбирать требуемое окончательное решение в качестве географического местоположения удаленного устройства на основании соответствующих расчетных ошибок решений о местоположении.
97. Устройство по п.96, в котором определение предварительного решения о местоположении включает в себя обработку данных сетевых измерений.
98. Устройство по п.96, в котором определение окончательного решения о местоположении включает в себя обработку данных несетевых измерений.
99. Устройство по п.96, в котором выбор требуемого окончательного местоположения включает в себя оценку соответствующих расчетных ошибок решений.
100. Удаленное устройство для использования в системе беспроводной связи, содержащее:
контроллер для сбора первого набора данных измерений из сигналов, принятых удаленным устройством;
механизм установления местоположения для приема первого набора данных и определения первого решения о местоположении удаленного устройства,
причем, используя знания о первом решении о местоположении, контроллер собирает второй набор данных измерений из сигналов, принятых удаленным устройством, и механизм установления местоположения принимает второй набор данных и определяет второе решение о местоположении удаленного устройства, и контроллер выбирает между первым и вторым решениями о местоположении на основании предопределенного критерия выбора, причем первое решение о местоположении и второе решение о местоположении основываются на различных измерениях.
101. Удаленное устройство для использования в системе беспроводной связи, содержащее:
контроллер для сбора первого набора данных измерений из сигналов, принятых удаленным устройством;
механизм установления местоположения для приема первого набора данных и определения первого решения о местоположении удаленного устройства,
причем контроллер собирает второй набор данных измерений из сигналов, принятых удаленным устройством, и механизм установления местоположения принимает второй набор данных и определяет второе решение о местоположении удаленного устройства, и контроллер выбирает между первым и вторым решениями о местоположении на основании предопределенного критерия выбора, причем первое решение о местоположении и второе решение о местоположении основываются на различных измерениях.
| US 5982324 А, 09.11.1999 | |||
| US 6289280 B1, 11.09.2001 | |||
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| US 5812087 A, 22.09.1998 | |||
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА | 1998 |
|
RU2122239C1 |

