Изобретение относится к средствам для выполнения наземной, морской или скважинной сейсмической разведки полезных ископаемых. Представляет собой описание способа компоновки сейсмических датчиков (геофонов, пьезодатчиков и др.) при записи сейсмической информации в точке регистрации и граф первичной обработки зарегистрированной информации. Изобретение направлено на повышение качества сейсмического материала, в частности на улучшение соотношения полезный сигнал-помеха.
Существует два типа трехкомпонентных сейсмоприемников:
- с датчиками, установленными под прямым углом относительно друг друга (ортогональная система), которые регистрируют компоненты Z, X, Y сейсмической информации. При такой системе датчиков соотношение полезный сигнал-помеха зависит от сейсмогеологических условий района работ, наличия и интенсивности микросейсм. Недостатком данного сейсмоприемника является то, что отсутствует возможность первичной обработки зарегистрированной информации с целью улучшения соотношения полезный сигнал-помеха. (1. Авторское свидетельство CCCP №1377799, кл. G01V 1/16, 1988; 2. RU 2050009 С1, 6 G01V 1/16; 3. RU 2046375 C1, 6 G01V 1/16; 4. RU 2046374 C1, 6 G01V 1/16; 5. RU 2084003 C1, 6 G01V 1/16; 6. Авторское свидетельство СССР №898365, кл. G01V 1/16, 1982; 7. Авторское свидетельство СССР №1603324, кл. G01V 1/16, 1990; 8. Авторское свидетельство СССР №1492333, кл. G01V 1/16, 1989.)
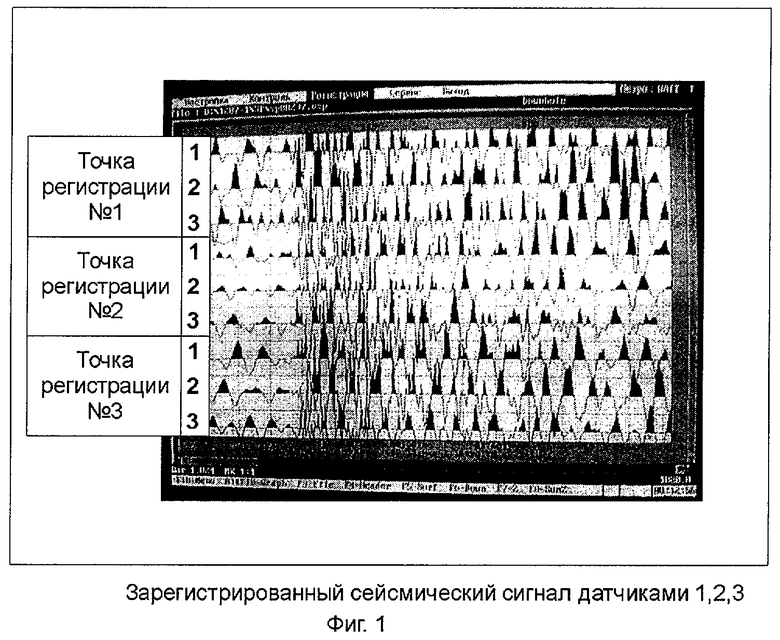
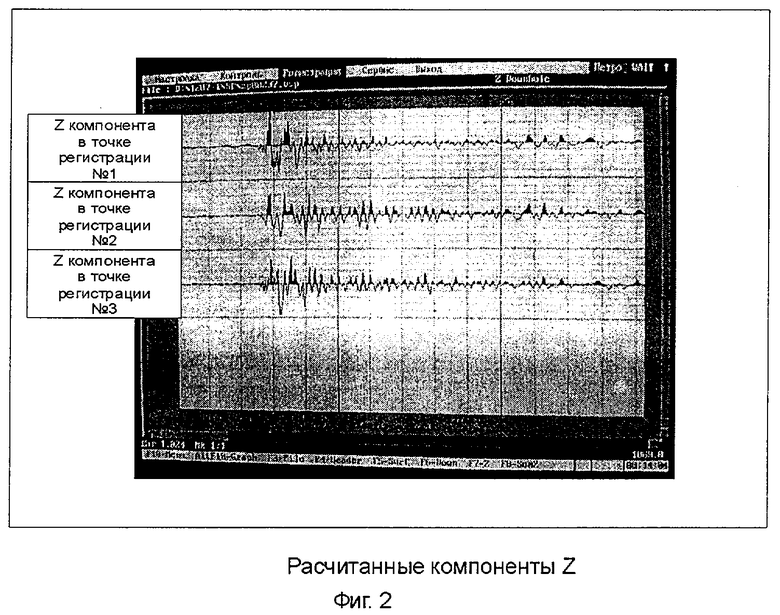
- с датчиками (условно 1, 2, 3), установленными под определенным углом к горизонту, который регистрирует три компоненты сейсмического сигнала. Путем математической обработки (суммирование зарегистрированных сигналов) рассчитывают компоненты Z, X, Y ортогональной системы необходимые для дальнейшей обработки сейсмической информации. При суммировании сигналов происходит улучшение соотношения полезный сигнал-помеха, что иллюстрируется представленными фотографиями с экрана монитора (фиг. 1 и фиг. 2). На фиг 1 представлен зарегистрированный сейсмический сигнал датчиками 1, 2, 3 в трех точках регистрации при производстве работ ВСП. На фиг. 2 представлены рассчитанные компоненты Z для данных точек регистрации. (9. Основы сейсморазведки / Бондарев В.И. - Екатеринбург, 2003 г. 10. Сейсморазведака / Боганик Г.Н., Гурвич И.И. - М.: Недра, 1980 г.).
Недостатком данного сейсмоприемника является то, что при расчетах компонент Z, X, Y возможна лишь однократная обработка исходного сейсмического сигнала, зарегистрированного датчиками 1, 2, 3, и тем самым ограничивается возможность улучшения соотношения полезный сигнал-помеха сейсмической информации. Задачей данного изобретения является решение вопроса значительного улучшения соотношения сигнал-помеха сейсмической информации. Поставленная цель достигается тем, что применяется способ компоновки сейсмоприемника и специальный граф первичной обработки исходной сейсмической информации.
Поставленная цель достигается тем, что применяется способ компоновки сейсмоприемника и специальный граф первичной обработки исходной сейсмической информации
В сейсмоприемнике располагаются четыре сейсмодатчика, регистрирующие 4 компоненты сейсмического сигнала:
На фиг. 3 представлена схема расположения сейсмодатчиков в сейсмоприемнике Компоненты 1, 2, 3 - наклонные, компонента 4 - вертикальная. При этом угол наклона каждой из компонент 1, 2, 3 относительно вертикальной четвертой компоненты составляет 120 градусов. В проекции на горизонтальную плоскость компоненты 1, 2, 3 расположены под углом 120 градусов относительно друг друга. Данный сейсмоприемник регистрирует весь спектр сейсмического сигнала как полезный сигнал - отраженный от отражающих границ нижней полусферы земной коры, так и помехи - сейсмические шумы, приходящие от различных источников с произвольных направлений.
Путем специальной математической обработки зарегистрированных сейсмических сигналов выделяется полезный сигнал на фоне случайных помех.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ СЕЙСМИЧЕСКИХ ВОЛН В ВОДНОЙ СРЕДЕ | 2014 |
|
RU2576625C2 |
| СПОСОБ ПОИСКА И КОНТРОЛЯ УГЛЕВОДОРОДОВ КОМПЛЕКСОМ ГЕОФИЗИЧЕСКИХ МЕТОДОВ | 2020 |
|
RU2758148C1 |
| Способ обнаружения подвижных объектов наземной техники | 2021 |
|
RU2773271C1 |
| СПОСОБ РЕГИСТРАЦИИ СЕЙСМОСИГНАЛОВ НА АКВАТОРИИ МОРЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270464C1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СПОСОБ ОПРЕДЕЛЕНИЯ ЗАЛЕГАНИЯ ПРОДУКТИВНЫХ НА УГЛЕВОДОРОДЫ ПЛАСТОВ И СЕЙСМИЧЕСКАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2433425C2 |
| СПОСОБ ОЦЕНКИ НЕФТЕГАЗОНОСНОСТИ ПОРОД | 2007 |
|
RU2321024C1 |
| Способ классификации подвижных объектов наземной техники с использованием особенностей сцепления их с почвой | 2021 |
|
RU2776588C1 |
| Способ скважинной сейсмической разведки | 2020 |
|
RU2760889C1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СЕЙСМИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431868C1 |
| СПОСОБ ОПЕРАТИВНОГО ИССЛЕДОВАНИЯ АТМОСФЕРЫ, ЗЕМНОЙ ПОВЕРХНОСТИ И ОКЕАНА | 2010 |
|
RU2436134C1 |
Изобретение относится к области сейсмической разведки, а именно к средствам для выполнения наземной, морской или скважинной сейсмической разведки полезных ископаемых. Сущность: четыре сейсмодатчика устанавливают так, чтобы угол между осями соседних датчиков составлял 120 градусов как в вертикальной, так и в горизонтальной плоскостях. Технический результат: повышение качества сейсмического материала. 3 ил.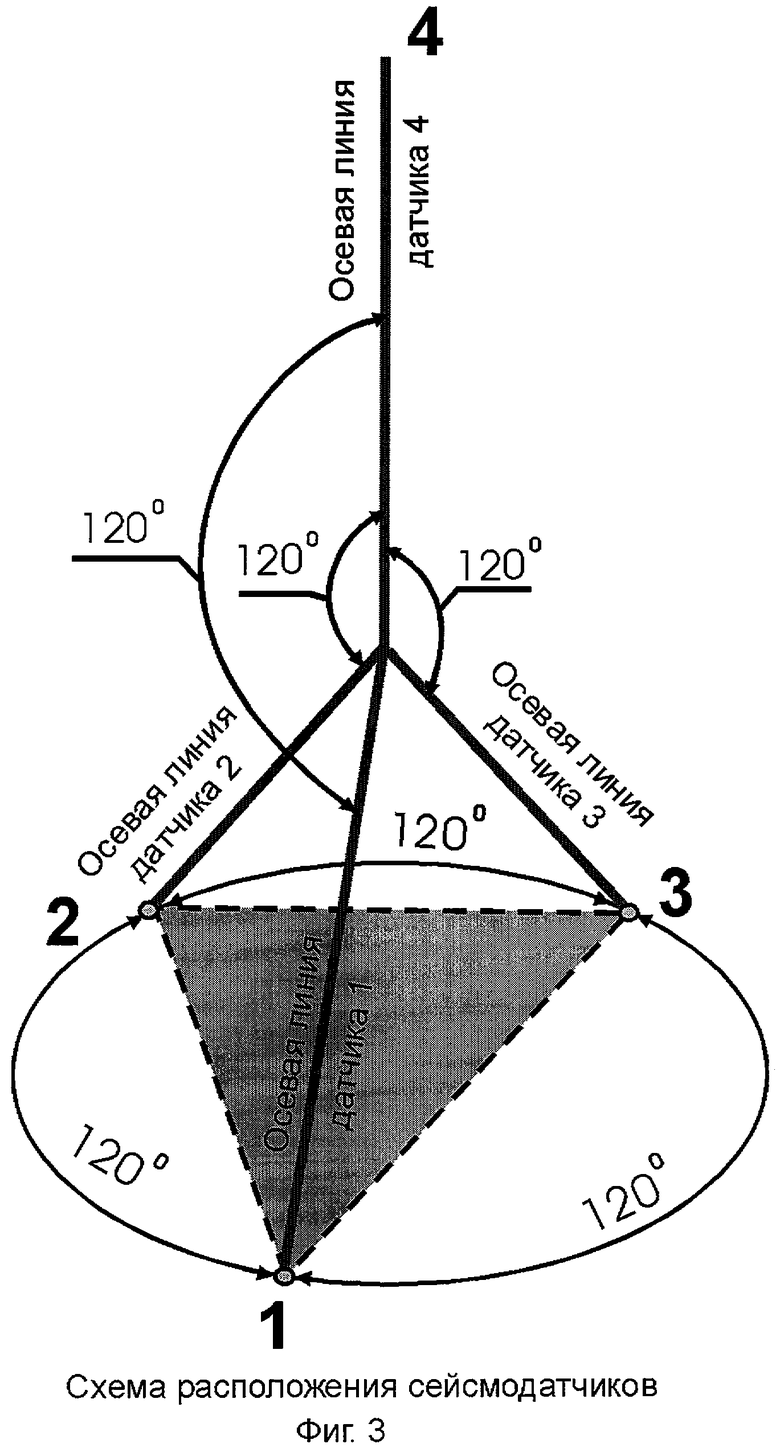
Способ компоновки сейсмоприемника, заключающийся в установке трех сейсмодатчиков, отличающийся тем, что дополнительно устанавливается четвертый сейсмодатчик, при этом угол между осями соседних датчиков составляет 120° как в вертикальной, так и в горизонтальной плоскостях.
| US 2004240314 A1, 02.12.2004 | |||
| Приспособление к ткацкому челноку для заводки уточной нити | 1931 |
|
SU29153A1 |
| Торфоформующая машина с барабанным отделителем пней | 1925 |
|
SU10889A1 |
| Способ сохранения битой птицы | 1932 |
|
SU32290A1 |
| БЛОК УПРАВЛЕНИЯ ИСТОЧНИКОМ ЭЛЕКТРОПИТАНИЯ | 2015 |
|
RU2651950C2 |

