Предлагаемое изобретение относится к области электромашиностроения, а именно к электромеханическим силовым устройствам, в частности к прямоходным исполнительным электромеханизмам для перемещения рабочих органов различных агрегатов, и может быть использовано в самых различных областях машиностроения, металлургии и т.д.
Известен прямоходный исполнительный электромеханизм Фирмы «Servomech« (Италия) серии UAL 2...4 (Servomech.ru, стр.5, 97, 98), содержащий корпус, на который установлены электродвигатель и винт со шкивами и приводным ремнем, защитная труба с передней втулкой, в которой размещен с возможностью продольного перемещения шток с силовой гайкой, снабженная индуктивными концевыми выключателями и устройством антиповорота штока со шпонкой.
Однако указанный электромеханизм имеет следующие недостатки: низкие технологические возможности из за отсутствия механизма ручного привода, поэтому невозможно перемещение штока вручную, например при наладке, обрыве ремня или при отключении электропитания. Кроме того, отсутствует возможность настройки индуктивных концевых выключателей и, следовательно, настройки хода штока. К тому же, отсутствует датчик положения и поэтому невозможно определить величину хода штока.
Кроме того, известен прямоходный исполнительный электромеханизм (патент Российской Федерации №2297088 С1, кл. Н02К 7/10, К 7/06), являющийся прототипом предлагаемого изобретения и содержащий корпус, на который установлены электродвигатель и винт с ведущим и ведомым шкивами и приводным ремнем, защитная труба с передней втулкой, в которой размещен с возможностью продольного перемещения шток с силовой гайкой, снабженная индуктивными концевыми выключателями, расположенными в ее окне с возможностью продольного перемещения и устройством антиповорота штока со шпонкой, которую охватывает вкладыш, имеющий внутренние и наружные боковые поверхности.
Однако указанный электромеханизм имеет следующие недостатки: низкие технологические возможности из-за отсутствия механизма ручного привода, поэтому невозможно перемещение штока вручную, например при наладке, обрыве ремня или при отключении электропитания. Кроме того, отсутствует возможность точной настройки индуктивных концевых выключателей (KB) и, следовательно, точной настройки хода штока. К тому же, отсутствует датчик положения и поэтому невозможно определить величину хода штока.
Кроме того, расположение KB на защитной трубе вблизи корпуса не позволяет на ней расположить по центру тяжести электромеханизма его шарнирные опоры, что делает затруднительным перемещать поворотные (качающиеся) органы агрегатов, т.к. для этого требуется его шарнирная установка.
Задачей предлагаемого изобретения является повышение технологических возможностей.
Поставленная задача достигается тем, что в прямоходный исполнительный электромеханизм, содержащий корпус, на который установлены электродвигатель и винт с ведущим и ведомым шкивами и приводным ремнем, защитная труба с передней втулкой, в которой размещен с возможностью продольного перемещения шток с силовой гайкой, снабженная индуктивными концевыми выключателями, расположенными в ее окне с возможностью продольного перемещения и устройством антиповорота штока со шпонкой, которую охватывает вкладыш, имеющий внутренние и наружные боковые поверхности, введены: механизм ручного привода, установленный на корпусе со стороны ведомого шкива, устройство точной настройки индуктивных концевых выключателей и индуктивный датчик положения, установленные на передней втулке защитной трубы, в которой для их размещения выполнены соответственно окно и отверстие, при этом концевые выключатели установлены в параллельных направляющих с возможностью независимого друг от друга перемещения, а на наружной поверхности штока, напротив каждого концевого выключателя выполнены как минимум по одному углублению, со смещением, друг относительно друга в угловом и осевом направлении и, напротив датчика положения, - продольная, наклонная лыска, причем величина осевого смещения углублений "L" составляет: L≥L1-L2, где L1 - максимальный рабочий ход штока; L2 - максимально возможное продольное расстояние между концевыми выключателями, а угол наклона продольной лыски "α" составляет: α≤arctgl/L1, где l - величина линейной зоны рабочего зазора датчика положения.
Также, вышеуказанные углубления и наклонная лыска могут быть заполнены нечувствительным для работы индуктивных концевых выключателей и датчика положения материалом заподлицо с наружной поверхностью штока.
При этом механизм ручного привода может быть выполнен в виде планетарного редуктора, в котором неподвижное зубчатое колесо и ведомый шкив на подшипниках установлены на корпусе, а водило с сателлитами закреплено на наружной поверхности винта, причем в центральное отверстие ведомого шкива помещено солнечное зубчатое колесо с возможностью осевого перемещения совместно с валом, который установлен в отверстиях винта и корпуса, при этом вал снабжен зубчатым венцом, одинаковым с венцом солнечного колеса, и рукояткой, закрепленной на нем с наружной стороны корпуса, а расстояние между зубчатыми венцами вала и солнечного колеса больше ширины сателлитов.
Кроме того, устройство точной настройки концевых выключателей может быть выполнено в виде установленной на передней втулке защитной трубы коробки, внутри которой в отверстиях торцевых стенок помещены с возможностью поворота и стопорения как минимум две параллельные резьбовые шпильки, а в дне коробки выполнены как минимум два продольных направляющих паза, причем каждый концевой выключатель расположен в соответствующем пазу и снабжен гайкой, установленной на соответствующую шпильку.
К тому же шпонка устройства антиповорота может быть выполнена в виде продольного выступа с гранями, которым снабжен шток, а вкладыш размещен в отверстии передней втулки защитной трубы, в которой установлены нажимные элементы, находящиеся в контакте с наружными боковыми поверхностями вкладыша, при этом последние могут быть снабжены опорами качения с возможностью их взаимодействия с гранями выступа штока.
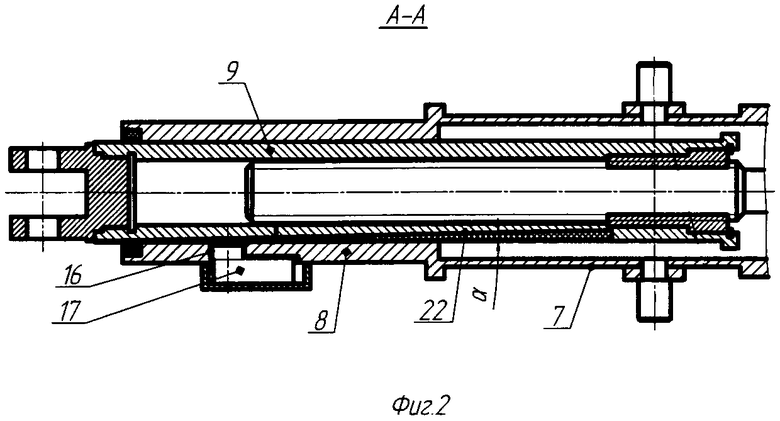
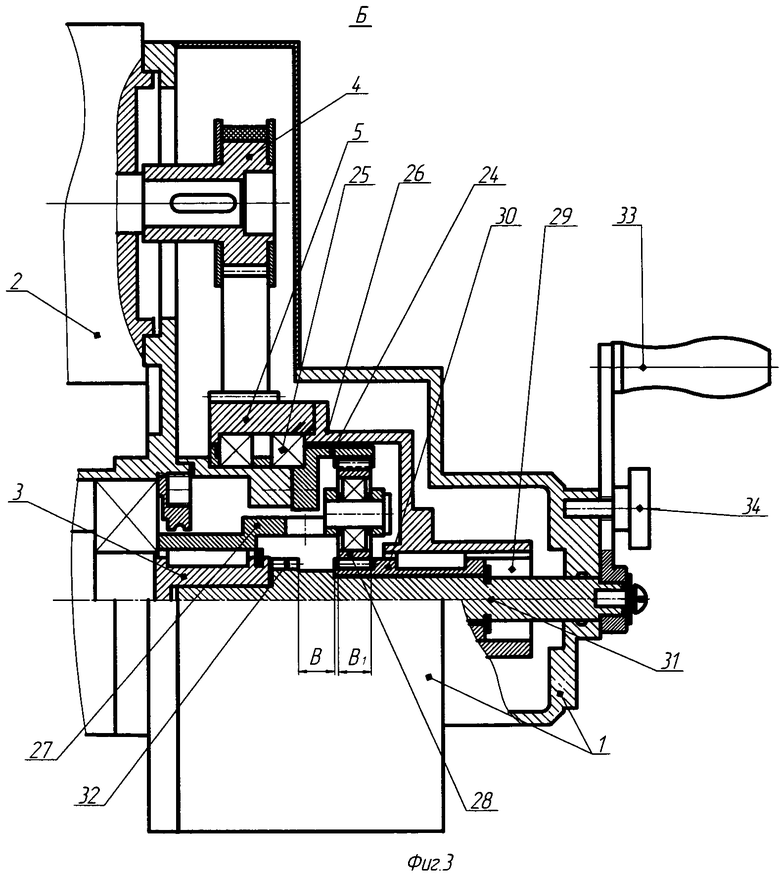
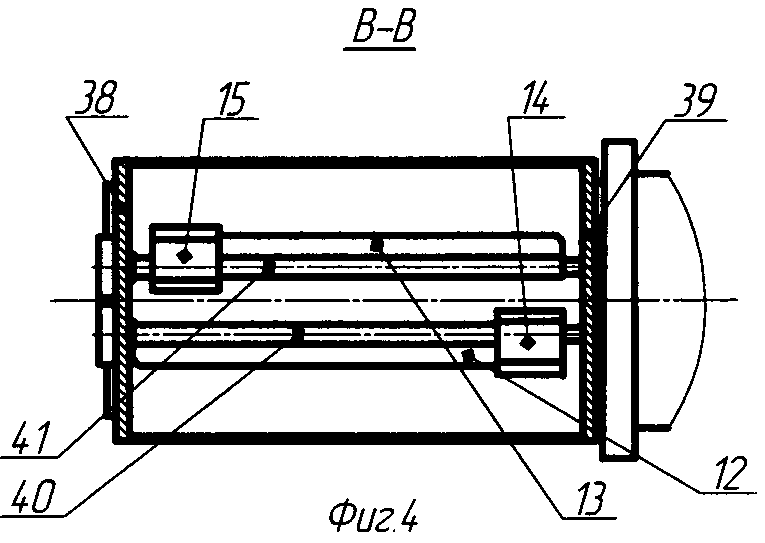
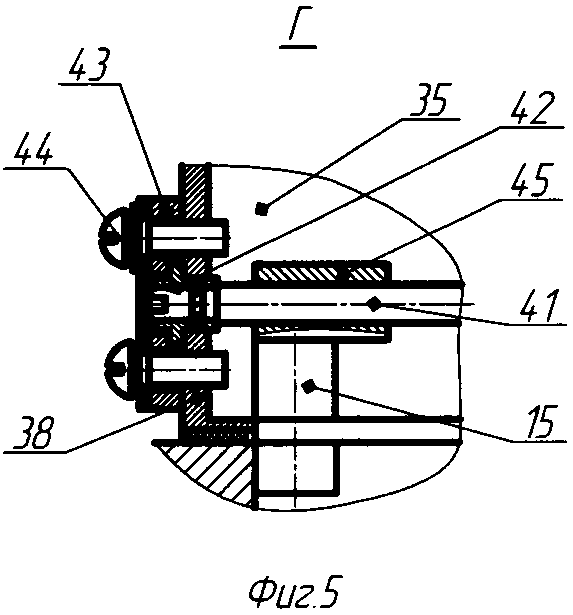
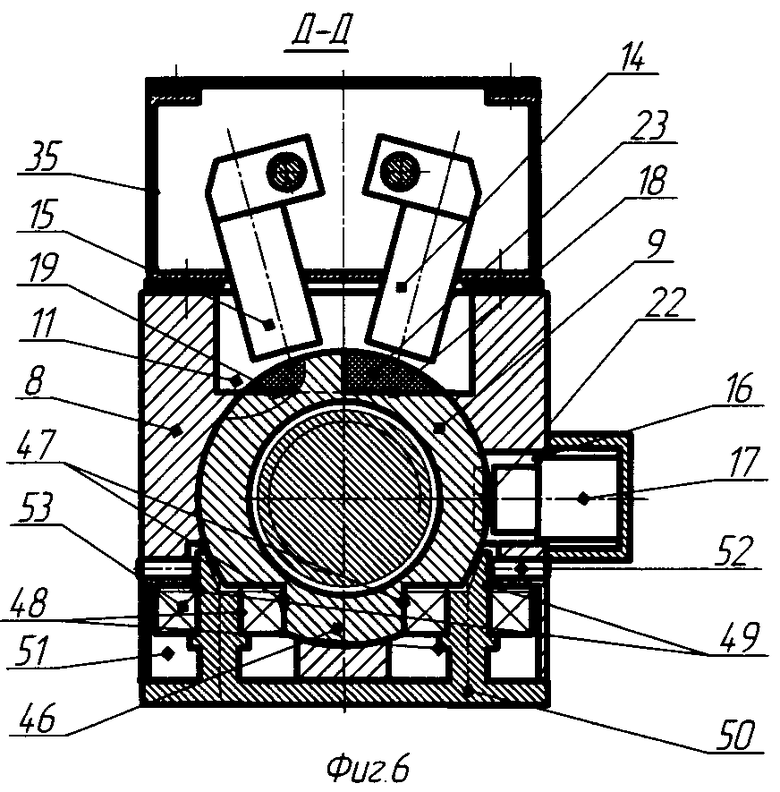
На фиг.1 приведен разрез предлагаемого электромеханизма, на фиг.2 - разрез А-А на фиг.1, на фиг.3 - вид Б на фиг.1, на фиг.4 - разрез В-В на фиг.1, на фиг.5 - вид Г на фиг.1, на фиг.6 - разрез Д-Д на фиг.1.
Предлагаемый электромеханизм (фиг.1) содержит корпус 1, на который установлен электродвигатель 2 и винт 3 с ведущим и ведомым шкивами 4 и 5 и приводным ремнем 6. В защитной трубе 7, в ее передней втулке 8 размещен шток 9 с силовой гайкой 10. На передней втулке 8 выполнены окно 11, внутри которого, в направляющих пазах 12 и 13 расположены индуктивные концевые выключатели 14 и 15 (KB) соответственно и отверстие 16, в которое помещен индуктивный датчик положения 17 (ДП) (фиг.2, 6). На наружной поверхности штока 9, напротив каждого KB 14 и 15, выполнены углубления 18 и 19 с внутренними краями 20 и 21, смещенные относительно друг друга в угловом и осевом направлении и, напротив ДП, - продольная, наклонная лыска 22, причем величина осевого смещения углублений 18 и 19 "L" составляет: L≥L1-L2, где L1 - максимальный рабочий ход штока; L2 - максимально возможное расстояние между KB, а угол наклона продольной лыски 22 "α" (фиг.2) составляет: α≤arctgl/L1, где l - величина линейной зоны рабочего зазора ДП.
Углубления 18 и 19, а также наклонная лыска 22 заполнены материалом 23 заподлицо с наружной поверхностью штока 9 (фиг.1, 6).
На корпусе 1 (фиг.3) установлено неподвижное зубчатое колесо 24 и ведомый шкив 5 на подшипниках 25 планетарного редуктора 26, а водило 27 с сателлитами 28 закреплено на наружной поверхности винта 3. В центральное отверстие 29 шкива 5 помещено солнечное зубчатое колесо 30 с возможностью осевого перемещения относительно него совместно с валом 31, установленным в отверстия винта 3 и корпуса 1, при этом вал 31 снабжен зубчатым венцом 32, одинаковым с венцом солнечного колеса 30, и рукояткой 33, закрепленной на нем с наружной стороны корпуса 1. Сателлиты 28 находятся в зацеплении с неподвижным и солнечным колесами 24 и 30, а осевое расстояние между зубчатыми венцами 32 вала 31 и солнечного колеса 30 больше ширины сателлитов 28, т.е. В>B1. Рукоятка 33 фиксируется на корпусе 1 зажимом 34.
На передней втулке 8 защитной трубы 7 установлена коробка 35, внутри которой, в отверстиях 36 и 37 ее торцевых стенок 38 и 39, помещены как минимум две параллельные резьбовые шпильки 40 и 41, каждая из которых снабжена наконечником 42, планкой стопорения 43 с крышкой 44 (фиг.1, 4, 5). На дне коробки 35 выполнены как минимум два направляющих паза 12 и 13, параллельных шпилькам. KB 14 и 15 расположены соответственно в пазах 12 и 13 и установлены на шпильки 40 и 41 через гайки 45. Вышеуказанные пазы и шпильки являются направляющими для КВ.
Кроме вышеуказанных углублений и лыски на штоке 9 выполнен выступ 46 с гранями 47 (фиг.6), охватываемые внутренними и наружными боковыми поверхностями 48 и 49 вкладыша 50, установленного в отверстии 51 передней втулки 8, которая снабжена нажимными элементами (винтами) 52, находящимися в контакте с наружными боковыми поверхностями 49 вкладыша 50. На вышеуказанных поверхностях размещены опоры качения 53, взаимодействующие с гранями 47 штока 9.
На защитной трубе 7 вблизи корпуса 1 установлены шарнирные опоры 54 для закрепления электромеханизма (фиг.2).
Электромеханизм работает следующим образом.
Реверсивное вращение от вала электродвигателя 2 передается через шкивы 4 и 5 ремнем 6 на солнечное колесо 30 планетарного редуктора 26, затем через сателлиты 28 и водило 27 на винт 3, при этом гайка 10 вместе со штоком 9 совершает возвратно-поступательное движение, т.к. шток 9 зафиксирован от проворота. Для перевода работы на ручной режим необходимо выдвинуть вправо вал 31 с рукояткой 33 из корпуса 1, предварительно отжав зажим 34, при этом солнечное колесо 30, перемещаясь вместе с валом 31, сначала выходит из зацепления с сателлитами 28, которые затем зацепляются с зубчатым венцом 32 вала 31, т.к. расстояние между солнечным колесом 30 и венцом 32 больше ширины сателлитов 28. При повороте рукоятки 33 вращение через вал 31, сателлиты 28, водило 27 передается на винт 3, т.е. данное вращение передается через редукцию, что позволяет рукояткой 33 получить на штоке 9 большие осевые усилия, а при случайном включении электродвигателя 2 ведомый шкив 5 вместе с солнечным колесом 30 будет свободно проворачиваться относительно вала 31, не мешая ручной работе. После окончания работы в ручном режиме вал 31 вместе колесом 30 и рукояткой 33 переводится в прежнее положение и фиксируется зажимом 34.
При движении штока 9 KB реагируют на отсутствие металла при наезде на них внутренних краев 20 и 21 углублений 18 и 19 соответственно. Для обеспечения требуемого максимального рабочего хода "L1", при максимально возможном расстоянии между KB 14 и 15 "L2", определяемом длиной окна 11, внутреннее расстояние между углублениями 18 и 19 "L" должно быть: L≥L1-L2.
Для настройки требуемого хода штока 9, величина которого обычно меньше максимального, необходимо ослабить зажим планки 43, развернуть крышку 44 и поворачивать шпильку 40 или 41, а так как KB зафиксирован от проворота пазами 12 или 13 коробки 35, то он будет перемещаться вместе с гайкой 45, уменьшая ход штока 9, при этом каждый KB может перемещаться встречно и независимо друг от друга с диапозоном "L2".
При движении штока 9 изменяется зазор между поверхностью наклонной лыски 22 и чувствительной частью ДП 17, при этом выдается сигнал, величина которого пропорциональна перемещению штока. Длина лыски 22 должна быть больше "L1", а для надежного использования линейной зоны рабочего зазора ДП, которое указывается в его паспорте, требуется соблюдение следующего условия: α≤arctgl/L1, где α - угол наклона лыски 22; l - величина линейной зоны рабочего зазора ДП.
Для обеспечения надежного уплотнения штока 9 в передней втулке 8 защитной трубы 7 вышеуказанные углубления 18 и 19 и наклонная лыска 22 заполнены материалом, например пластмассовой вставкой 23 или эпоксидным компаундом, на который KB и ДП не реагируют, заподлицо с наружной поверхностью штока 9.
При работе электромеханизма шток 9 зафиксирован от проворота опорами качения 53 вкладыша 50, при этом нажимные винты 52 увеличивают жесткость от изгиба его боковых поверхностей 48 и 49, а также, при их дополнительной подтяжке, устраняют люфт между гранями 47 выступа 46 и опорами 53 в пределах упругой деформации тела вкладыша 50, так как наличие люфта приводит к перемещению (качанию) лыски 22 и искажению показаний ДП, а наличие опор качения 53 устраняет износ вкладыша 50.
Таким образом, в предлагаемом электромеханизме в отличие от прототипа обеспечена возможность его работы в ручном режиме, при этом достигаются большие усилия на штоке, т.к. поворот силового винта от рукоятки производится через редуктор, а сам механизм ручного привода является безопасным и расширяет верхний диапозон возможных усилий.
Введенное устройство настройки KB и введение ДП позволяют расширить возможности по точности выставки хода штока и определения его величины при увеличении удобства настройки и сохранении герметичности конструкции.
Кроме этого, в предлагаемом электромеханизме возможна регулировка по устранению люфта в устройстве антиповорота, исключен износ вкладыша, что расширяет возможности для применения его в точной механике.
Кроме того, расположение введенных устройств KB и ДП на передней втулке позволяет установить на защитной трубе, вблизи корпуса, шарнирные опоры крепления, что расширяет возможности электромеханизма по перемещению поворотных (качающихся) рабочих органов агрегатов, т.к. для этого требуется его шарнирная установка.
Таким образом, предлагаемый электромеханизм имеет более высокие технологические возможности.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЯМОХОДНЫЙ ИСПОЛНИТЕЛЬНЫЙ ЭЛЕКТРОМЕХАНИЗМ | 2005 |
|
RU2297088C1 |
| Червячно-винтовой прямоходный электромеханизм | 2023 |
|
RU2817765C1 |
| ПРЯМОХОДНЫЙ ИСПОЛНИТЕЛЬНЫЙ ЭЛЕКТРОМЕХАНИЗМ | 2020 |
|
RU2756328C1 |
| БЕЗЫНЕРЦИОННАЯ КАТУШКА ДЛЯ ЛЕСЫ "СВЕТЛАНА" | 1989 |
|
RU2067391C1 |
| МЕХАНИЧЕСКАЯ ПЕРЕДАЧА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2015038C1 |
| АНТИРЕВЕРСИВНЫЙ МЕХАНИЗМ КАТУШКИ ДЛЯ ЛЕСЫ | 1989 |
|
RU2067390C1 |
| ФРИКЦИОННАЯ ПРЕДОХРАНИТЕЛЬНАЯ МУФТА КАТУШКИ ДЛЯ ЛЕСЫ | 1989 |
|
RU2067392C1 |
| Устройство для закатки изделий | 1983 |
|
SU1183234A1 |
| Устройство для непрерывной намотки на катушку нитеобразных материалов | 1974 |
|
SU691225A2 |
| ВЕРТОЛЕТ | 2016 |
|
RU2629731C1 |
Изобретение относится к электротехнике и может быть использовано в электромашиностроении, а именно в электромеханических силовых устройствах, в частности к прямоходных исполнительных электромеханизмах для перемещения рабочих органов различных агрегатов и в самых различных областях машиностроения, металлургии и т.д. Прямоходный исполнительный электромеханизм содержит корпус, на который установлены электродвигатель и винт с ведущим и ведомым шкивами и приводным ремнем, защитная труба с передней втулкой, в которой размещен с возможностью продольного перемещения шток с силовой гайкой. Индуктивные концевые выключатели расположены в окне защитной трубы с возможностью точного, независимого друг от друга, настроечного перемещения в параллельных направляющих, выполненных в виде резьбовых шпилек и пазов, расположенных внутри коробки. На наружной поверхности штока напротив каждого концевого выключателя выполнены углубления, смещенные друг относительно друга в угловом и осевом направлении, и наклонная лыска - напротив установленного на передней втулке индуктивного датчика положения. Технический результат состоит в повышении технологических возможностей. 4 з.п. ф-лы, 6 ил.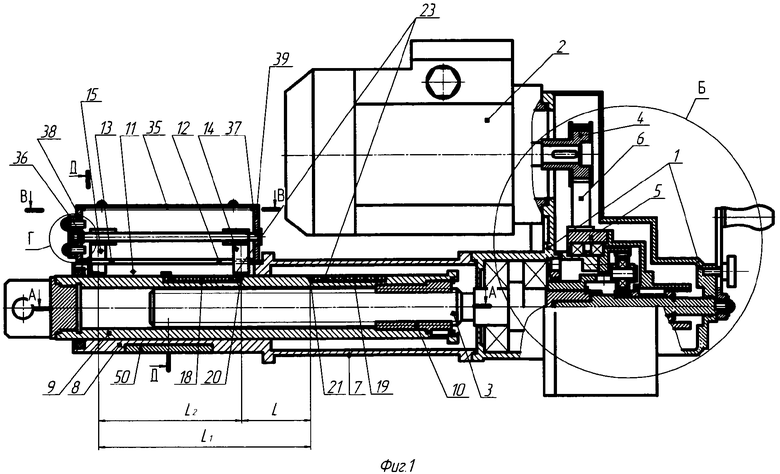
| ПРЯМОХОДНЫЙ ИСПОЛНИТЕЛЬНЫЙ ЭЛЕКТРОМЕХАНИЗМ | 2005 |
|
RU2297088C1 |
| ЭЛЕКТРОПРИВОД | 2000 |
|
RU2186451C1 |
| ЭЛЕКТРОПРИВОД | 1997 |
|
RU2130228C1 |
| ЭЛЕКТРОПРИВОД | 1995 |
|
RU2084067C1 |
| US 3691858 А, 19.09.1972 | |||
| US 3402308 A, 17.09.1968 | |||
| Станок для обработки глубоких отверстий | 1984 |
|
SU1291304A1 |
| DE 3733781 A1, 27.04.1989. | |||

