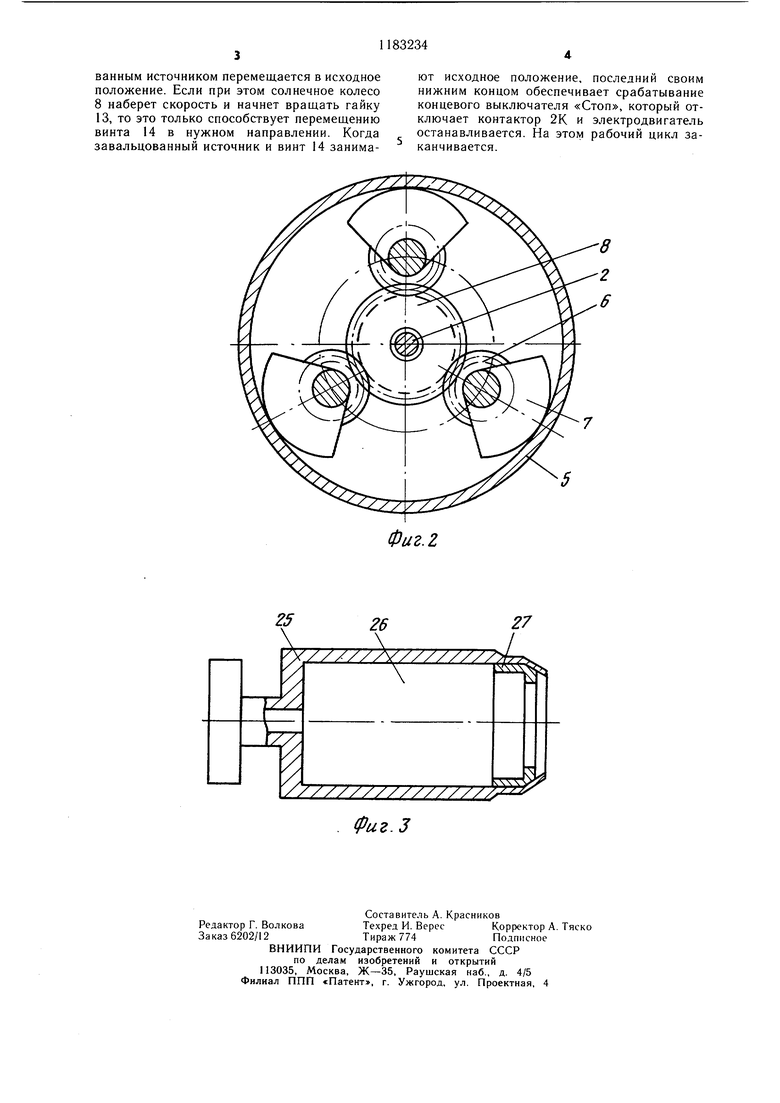
Изобретение относится к обработке металлов давлением, в частности к устройствам для закатки кромок. Целью изобретения является повышение производительности путем автоматического и ускоренного отвода патрона с изделием от закаточных роликов. На фиг. 1 изображена принципиальная схема предлагаемого устройства, включающая кинетическую схему управления; на фиг. 2 - возможная конструкция планетарной передачи; на фиг. 3 - одна из конструкций источника после его закатки. Устройство содержит клиноременную передачу, с ведомым шкивом 1 которой жестко связан вал 2, несуший ведущее звено обгонной муфты 3, щестерню 4 и корпус 5 планетарного механизма, в который входят сателлиты 6 с грузами 7 и солнечное колесо 8, несущее тахорегулятор 9 и шестерню 19, связанную промежуточными шестернями 11 и 12 с гайкой 13. Винт 14 посредством шестерни 15 связан с зубчатым колесом 16 на валу 17 обгонной муфты 3. Источник 18 взаимодействует с подпружиненным штоком 19 и рабочими роликами 20. Шпиндель 21 жестко связан с зубчатым колесом 22, связанным зубчатой передачей 23 с колесом 4. Шаговый транспортер 24 обеспечивает передачу заготовок 18. Изделие содержит корпус держателя 25, стандартную ампулу 26 с радиоактивным оператором и крышку 27. Устройство работает следующим образом. Перед началом рабочего цикла источник 18 (фиг. 1) устанавливают в рабочее положение (в условиях «горячей камеры это осуществляется с помошью манипулятора) и нажимают кнопку «Пуск. В результате этого срабатывает контактор 1К, который собственными контактами берется на самоудержание и одновременно обеспечивает запуск электродвигателя в прямом направлении. Через клиноременную передачу это движение передается валу 2, от которого посредством шестерни 4, промежуточной передачи 23 и зубчатого колеса 22 осуществляется врашение шпинделя 21, несущего рабочие закаточные ролики 20. Закатка источника осуществляется только при работе электродвигателя в прямом направлении и сопровождается это рабочей подачей, движущий момент которой обеспечивает планетарная передача при взаимодействии ее корпуса 5, который жестко связан с валом 2, с солнечным колесом 8. Это взаимодействие осуществляется посредством сателлитов 6 с неуравновешенными грузами 7. Неуравновешенность грузов 7 (фиг. 2) заключается в том, что их центры масс смешены как относительно осей вращения сателлитов 6, так и относительно оси врашения корпуса 5 и солнечного колеса 8. Это ведет к тому, что в результате вращения корпуса 5 на солнечном колесе 8 может возникнуть крутящий момент за счет центробежных сил инерции грузов 7, которые вместе с сателлитами 6 при установивщемся движении стремятся занять положение, показанное на фиг. 2. Рабочая подача осуществляется следующим образом. При вращении вала электродвигателя в прямом направлении (фиг. 1) обгонная муфта 3 работает в пассивном режиме, это означает, что зубчатое 14 колесо и шестерня 15 находятся в покое, а перемещение винта 14, который с шестерней 15 связан скользящей шпонкой (не показана), осушествляется лишь только в результате вращения гайки 13. Поэтому, если момент сопротивления рабочей подачи не превышает крутящий момент, то корпус 5 совместно с сателлитами 6 и грузами 7 вращается вместе с солнечным колесом 8 как единое целое. В этом случае вращение солнечного колеса 8 через шестерню 10 и промежуточный блок передается гайке 13, которая перемешает винт 14 совместно с источником 18 в направлении рабочих роликов 20. Для исключения возможности проворота при завальцовке источник 18 во время рабочей подачи сначала встречает сопротивление подпружиненного штока 19 и только после этого вступает во взаимодействие с рабочими роликами. Окончание процесса завальцовки и прекращение рабочей подачи осуществляются автоматически: взаимодействующие с источником 18 рабочие ролики 20, исчерпав податливость кромки (фиг. 3) корпуса держателя 25, испытывают жесткое сопротивление крышки 27 и стандартной ампулы 22, которая в этом случае оказывается плотно прижатой ко дну корпуса держателя 25. Поэтому момент сопротивления (фиг. 1) на гайке 11 резко возрастает, солнечное колесо 8 теряет скорость, а вращение корпуса 5 компенсируется сателлитами 6, которые совместно с грузами 7 обкатывают солнечное колесо 8. Это изменение скорости фиксируется центробежным тахорегулятором 9, который воздействуя на путевой переключатель «Реверс, обеспечивает переключение электродвигателя в обратном направлении. Срабатывание путевого переключателя «Реверс ведет к замыканию цепи питания контактора 2К, который собственными контактами берется на самоудержание, отключает цепь питания контактора 1К и включает реверсивные цепи питания электродвигателя. В этом случае вал 2 получает вращение в обратном направлении, а обгонная муфта 3 при этом работает в активном режиме, вращая зубчатое колесо 16. Последнее обеспечивает передачу рабочего момента непосредственно от вала 2, осуществляет вращение шестерни 15 в направлении, ппи котором винт 14 совместно с завальцованным источником перемещается в исходное положение. Если при этом солнечное колесо 8 наберет скорость и начнет вращать гайку 13, то это только способствует перемещению винта 14 в нужном направлении. Когда завальцованный источник и винт 14 занимают исходное положение, последний своим нижним концом обеспечивает срабатывание концевого выключателя «Стоп, который отключает контактор 2К и электродвигатель останавливается. На этом рабочий цикл заканчивается.
Фиг.г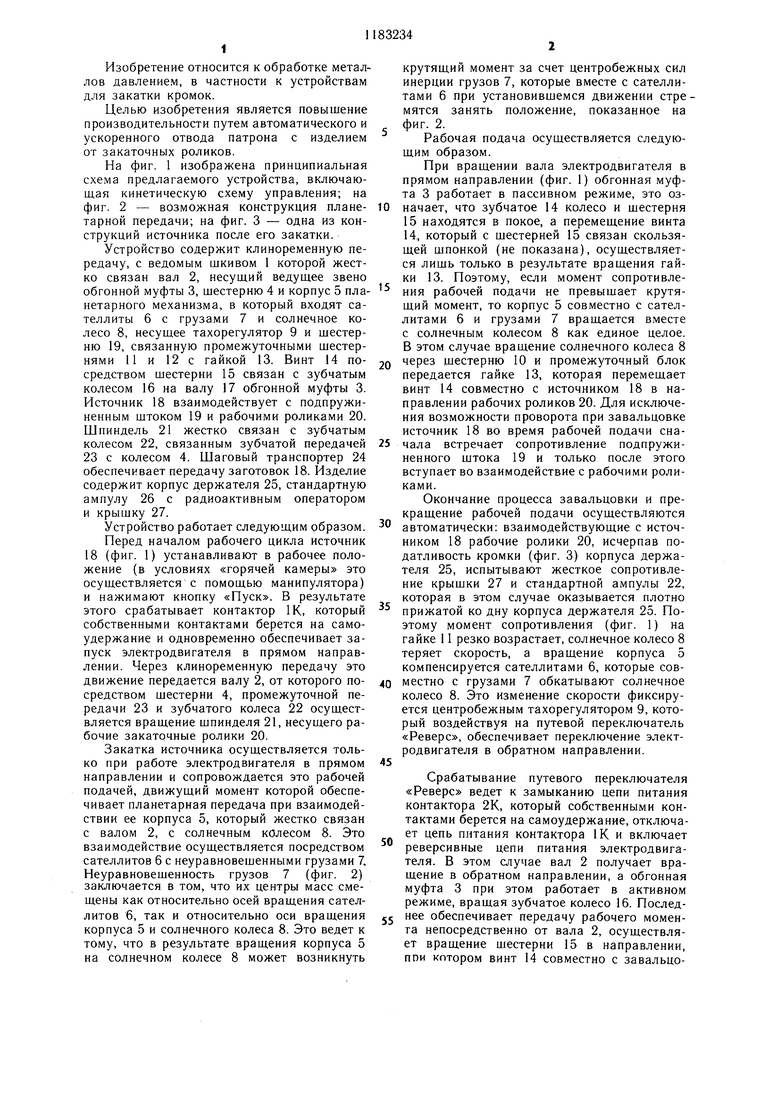
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАВУЧАЯ ПРИБРЕЖНАЯ ГИДРОВОЛНОВАЯ ЭЛЕКТРОСТАНЦИЯ | 2014 |
|
RU2626188C2 |
| СУДНО С ГИДРОВОЛНОВОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2014 |
|
RU2603813C2 |
| Устройство для непрерывной намотки на катушку нитеобразных материалов | 1974 |
|
SU691225A2 |
| Планетарная головка для абразивной обработки плоских поверхностей | 1989 |
|
SU1611703A1 |
| Расточная головка | 1986 |
|
SU1393545A1 |
| Лебедка | 1975 |
|
SU576284A1 |
| Устройство для намотки ленточныхМАгНиТОпРОВОдОВ | 1979 |
|
SU853683A1 |
| Электропривод трубопроводной арматуры с ручным дублером | 2024 |
|
RU2829243C1 |
| Гайковерт инерционный | 1979 |
|
SU848335A1 |
| ПОРШНЕВОЙ ДВИГАТЕЛЬ С РЕГУЛИРУЕМОЙ СТЕПЕНЬЮ СЖАТИЯ | 2008 |
|
RU2382217C1 |
УСТРОЙСТВО ДЛЯ ЗАКАТКИ ИЗДЕЛИЙ, преимущественно корпусов ампул- с радиоактивным препаратом, содержащее патрон, установленный с возможностью вертикального перемещения от привода, и расположенный соосно с ним шпиндель с закаточными роликами, отличающееся тем, что, с целью повышения производительности путем автоматического и уско ренного отвода патрона с изделием от закаточных роликов, оно снабжено кинематически связанной со шпинделем муфтой предельного крутящего момента в виде планетарного механизма с эксцентрично установленными на осях сателлитов грузами, механизмом реверсирования привода вертикального перемещения патрона, выполненным в виде центробежного тахорегулятора и взаимодействующего с ним переключателя, установленного на выходном валу планетарного механизма, и механизм ускоренного отвода патрона от закаточных роликов, выполненным в виде обгонной муфты, ведущая полумуфта которой установлена на входном валу планетарного механизма, а привод вертикального перемещения патрона выполнен в виде винтовой пары, понижающей зубчатой передачи с шестерней, жестко закрепленной на выходном валу планетарного механизма, повышающей зубчатой передачи о SS с шестернями, одна из которых жестко связана с ведомой полумуфтой обгонной муф- ff ты, а другая - с винтом винтовой пары,l при этом гайка винтовой пары выполнена f с зубчатым венцом и связана с другойl шестерней понижающей зубчатой передачи,а 00 оо ic оо 4ib
. Фиг.З
| Дикие М | |||
| Я- Машины-автоматы для герметизации консервной тары | |||
| Киев.: Машгиз, 1955, с | |||
| Способ получения борнеола из пихтового или т.п. масел | 1921 |
|
SU114A1 |
| Контрольный стрелочный замок | 1920 |
|
SU71A1 |
