Область техники
Настоящее изобретение относится к транспортирующему устройству, выполненному с возможностью выборочного перемещения платформы, установленной на транспортной тележке с возможностью подъема и опускания с помощью подъемных пантографов, при этом подъем осуществляется криволинейной направляющей, установленной сбоку от маршрута транспортировки.
Уровень техники
В транспортирующем устройстве, относящемся к типу, описанному в Патентном Документе 1, платформу с возможностью подъема и опускания поддерживают пантографы, на которые воздействует приводной узел, образованный поднимающим/опускающим элементом, который прилагает осевое усилие к пантографам для их подъема, при этом осевое усилие к приводному узлу прилагает криволинейная направляющая, расположенная сбоку от маршрута транспортировки, для поднятия платформы.
Патентный Документ 1: опубликованная не прошедшая экспертизу заявка на патент Японии №Н07-172538.
В транспортирующем устройстве ход подъема платформы может быть больше хода подъема поднимающего/опускающего элемента за счет размещения оперативного положения поднимающего/опускающего элемента на пантографах в положении центральной оси пантографов или ближе к положению оси рычага на стороне транспортной тележки, чем положение центральной оси пересечения. Однако даже при таком способе для увеличения хода подъема платформы для того, чтобы поднять ее на определенную высоту, ход подъема поднимающего/опускающего элемента необходимо соответствующим образом увеличить. Следовательно, увеличивается высота не только той части поднимающего/опускающего элемента, которая выступает вниз из транспортной тележки, но и высота криволинейной направляющей, установленной на полу сбоку от транспортного маршрута, в результате чего становится невозможным опускание верхней поверхности транспортной тележки (рабочего пола на транспортной тележке), то есть транспортную тележку невозможно изготовить как конструкцию с низким полом.
Краткое описание изобретения
Целью настоящего изобретения является создание транспортирующего устройства, в котором возможно устранить известные проблемы, описанные выше, и средства достижения этой цели будут описаны ниже со ссылками на позиции, показанные в скобках. В транспортирующем устройстве имеется платформа (3), установленная на транспортной тележке (1) с возможностью свободного подъема и опускания на раздвижном пантографе (13а), первая криволинейная направляющая (47А) и вторая криволинейная направляющая (48), при этом первая криволинейная направляющая (47А) воздействует на первый приводной узел (28), выполненный за одно целое с пантографом (13а) и выступающий вниз из транспортной тележки (1) таким образом, чтобы поднимать платформу (3) на промежуточную высоту (Н1), а вторая криволинейная направляющая (48) воздействует на второй приводной узел (29), выполненный за одно целое с пантографом (13а) и выступающий вниз из транспортной тележки (1) для подъема платформы (3) с промежуточной высоты (Н1) до максимальной высоты (Н2), при этом второй приводной узел (29) выполнен на средней оси (36) перегиба коленного рычага (32), установленного между рычагом (14а) пантографа (13а) и фиксированным положением на боковой стороне транспортной тележки (1) или вблизи нее, при этом коленный рычаг (32) сложен в положение, когда верхние концевые оси (37 и 39) расположены либо спереди либо сзади в направлении транспортировки относительно средней оси (36) перегиба, когда платформа (3) поднята на промежуточную высоту (Н1), так что верхние концевые оси (37 и 39) достигают положения, отделенного как на передней, так и на задней стороне, относительно направления транспортировки от средней оси (36) перегиба, и второй приводной узел (29) в выдвинутом положении расположен ниже, чем в это время расположен первый приводной узел (28).
Что касается вариантов осуществления настоящего изобретения в вышеописанной конфигурации, в частности, согласно второму аспекту настоящего изобретения первый приводной узел (28) может содержать ролик (31а) кулачкового следящего элемента, установленный на выступающем участке (30а), непрерывно отходящем вниз от рычага (14а) пантографа (13а), и который непосредственно выталкивается вверх первой криволинейной направляющей (47А).
Кроме того, согласно третьему аспекту настоящего изобретения второй приводной узел (29) может содержать ролик (33) кулачкового следящего элемента, установленный концентрично со средней осью (36) перегиба коленного рычага (32), и непосредственно выталкивается вверх второй криволинейной направляющей (48). Эта конфигурация может комбинироваться с конфигурацией согласно второму аспекту настоящего изобретения.
Далее, согласно четвертому аспекту настоящего изобретения пантографы установлены вблизи друг друга как пара из левого и правого пантографов, так что соответствующие оси расположены концентрично друг с другом, при этом первый приводной узел (28) может содержать пару из левого и правого роликов (31а и 31b), которые соответственно непосредственно выталкиваются вверх двумя проходящими вблизи друг друга криволинейными направляющими (47А) и установлены на выступающих участках (30а и 30b), выполненных за одно целое с внутренними рычагами (14а и 15а) соответствующих пантографов (13а и 13b), при этом коленный рычаг (32) снабжен вторым приводным узлом (29) и может быть размещен между центральной частью подвесного элемента (37), установленного между внутренними рычагами (14а и 15b) соответствующих пантографов (13а и 13b) и фиксирующего положение на боковой стороне транспортной тележки (1), при этом в среднем положении между двумя первыми криволинейными направляющими (47А) может быть установлена единственная вторая криволинейная направляющая (48), которая воздействует на второй приводной узел (29). Эта конфигурация может комбинироваться с конфигурацией согласно второму и третьему аспектам настоящего изобретения.
Кроме того, согласно пятому аспекту настоящего изобретения на пантографе (13а) может быть одновременно установлено запирающее средство (40), предотвращающее падение пантографа (13а), на котором платформа (3) поднята на максимальную высоту (Н2) второй криволинейной направляющей (47А) и вторым приводным узлом (29). Эта конфигурация может комбинироваться с конфигурацией согласно второму, третьему и четвертому аспектам настоящего изобретения. Если применяется конфигурация согласно пятому аспекту настоящего изобретения, то согласно шестому аспекту настоящего изобретения запирающее средство (40) может содержать защелку (42), автоматически запирающую запираемый участок (41), выполненный на скользящей оси (25) на боковой стороне транспортной тележки (1) пантографа (13а) или вблизи нее.
Благодаря транспортирующему устройству согласно настоящему изобретению, имеющему вышеописанную конфигурацию, платформа поднимается на максимальную объективную высоту путем выталкивания ее вверх в два этапа, используя первый приводной узел и первые криволинейные направляющие, а также второй приводной узел и вторую криволинейную направляющую. Однако если для первого приводного узла и первых криволинейных направляющих достаточно, чтобы они поддерживали пантографы в приподнятом состоянии до тех пор, пока не возникнет состояние, когда второй приводной узел, установленный вблизи средней оси перегиба коленного рычага, начнет выталкиваться вверх второй криволинейной направляющей, то есть пока коленный рычаг, сложенный в состояние, где обе концевые оси расположены либо спереди либо сзади в направлении транспортировки относительно средней оси перегиба, не придет в разложенное состояние, когда верхние концевые оси отделены впереди и сзади в направлении транспортировки от средней оси перегиба, и ход подъема платформы под воздействием первого приводного узла и первых криволинейных направляющих может быть достаточно мал по сравнению с полным ходом до максимальной объективной высоты. Кроме того, как описано выше, когда платформа поднята на промежуточную высоту первым приводным узлом и первыми криволинейными направляющими, высота второго приводного узла, выполненного за одно целое с коленным рычагом, практически не изменяется по сравнению с высотой, которую он занимал, когда пантографы находились в сложенном состоянии (когда платформа расположена на предельной низкой высоте), и второй приводной узел расположен существенно ниже, чем первый приводной узел, вытолкнутый вверх первыми криволинейными направляющими. Следовательно, при высоте второй криволинейной направляющей, которая выталкивает второй приводной участок, почти идентичной высоте первых криволинейных направляющих, платформу можно поднять с промежуточной высоты на большую максимальную высоту благодаря коленному рычагу.
Как следует из вышеописанного, за счет конфигурации согласно настоящему изобретению при существенном снижении высоты нижнего пространства транспортной тележки, другими словами, при существенном снижении высоты верхней поверхности транспортной тележки (рабочего пола транспортной тележки) для создания транспортной тележки с низким полом можно обеспечить максимальную необходимую высоту подъема платформы. Разумеется, можно использовать и такой вариант, когда на заданном участке маршрута транспортировки, где нужно поднять платформу на промежуточную высоту, укладываются только первые криволинейные направляющие, а на участке, где платформу нужно поднять на максимальную высоту, укладывают и первые и вторые криволинейные направляющие.
Изобретение в конфигурации согласно второму и третьему аспектам может быть реализовано просто и с небольшими затратами.
Пантографы, поддерживающие платформу с возможностью свободного подъема и опускания, установлены, по существу, вблизи друг друга как пара из правого и левого пантографов, так что соответствующие оси являются концентричными друг с другом. В этом случае в конфигурации согласно четвертому аспекту настоящего изобретения платформу на первом этапе подъема, где необходимо большое выталкивающее усилие, можно без труда сильно вытолкнуть на промежуточную высоту двумя первыми криволинейными направляющими, расположенными слева и справа, то есть выполнить первый этап выталкивания, когда платформа поднимается на промежуточную высоту первым приводным узлом и первыми криволинейными направляющими, а на втором этапе выталкивания, когда требуется меньшее усилие выталкивания по сравнению с первым этапом, то есть когда платформа поднимается на максимальную высоту вторым приводным узлом и второй криволинейной направляющей, платформу можно поднимать на максимальную высоту хорошо сбалансированным способом, выталкивая центральный участок между левым и правым пантографами единственной второй криволинейной направляющей. А именно с помощью конфигурации согласно четвертому аспекту настоящего изобретения это изобретение можно разумно реализовать с помощью двух расположенных вблизи друг друга пантографов, где соответствующие оси концентричны друг с другом.
В состоянии, когда платформа поднята на максимальную высоту, поскольку на разложенный коленный рычаг, принявший раздвинутое положение или положение, близкое к раздвинутому, действует большая сжимающая нагрузка, имеется большой риск деформации коленного рычага за счет изгиба, что может привести к падению платформы. Следовательно, в конструкции согласно настоящему изобретению, в частности, согласно пятому аспекту настоящего изобретения используется запирающее средство, выполненное заодно с пантографом и предотвращающее падение пантографа, когда платформа поднята на максимальную высоту второй криволинейной направляющей и вторым приводным узлом, что существенно повышает безопасность. В этом случае в конфигурации согласно шестому аспекту настоящего изобретения запирающее средство имеет не только простую конструкцию, но и не требует специальной запирающей операции или запирающего привода, когда платформа поднята на максимальную высоту, так что настоящее изобретение может быть реализовано с уменьшенными затратами.
Краткое описание чертежей
Фиг.1А - схематический частичный вид сбоку в продольном сечении базовой конфигурации транспортирующего устройства согласно настоящему изобретению;
Фиг.1В - схематичный вид сверху устройства с фиг.1А;
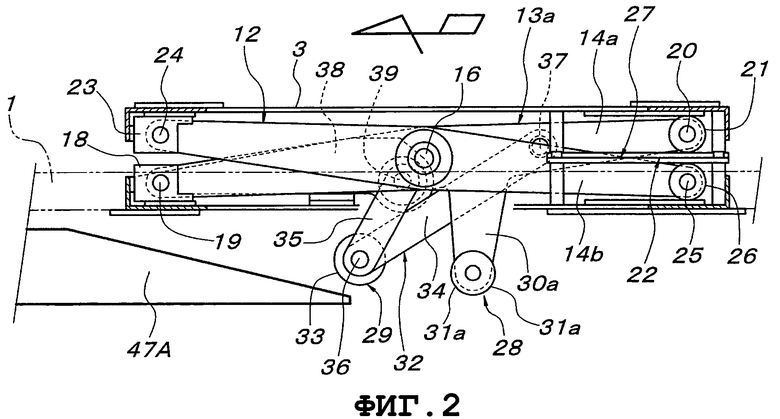
Фиг.2 - вид сбоку в продольном сечении главной части, причем платформа расположена на предельной нижней высоте;
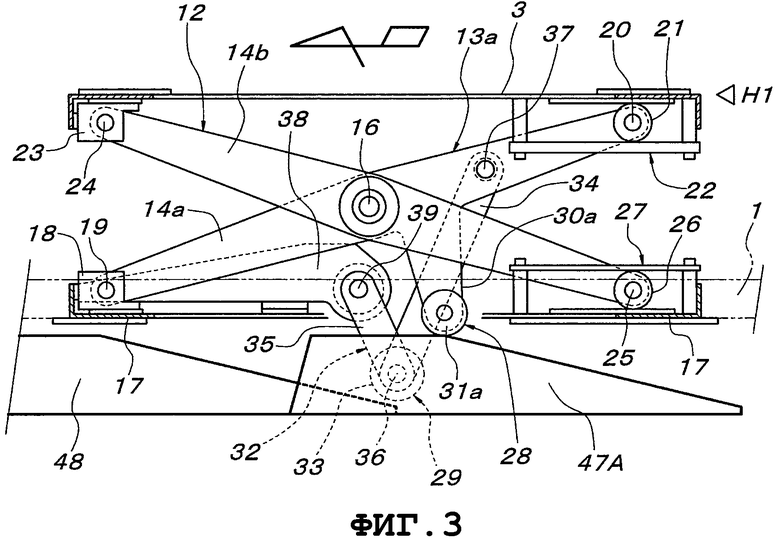
Фиг.3 - вид сбоку в продольном сечении главной части, причем платформа расположена на промежуточной высоте;
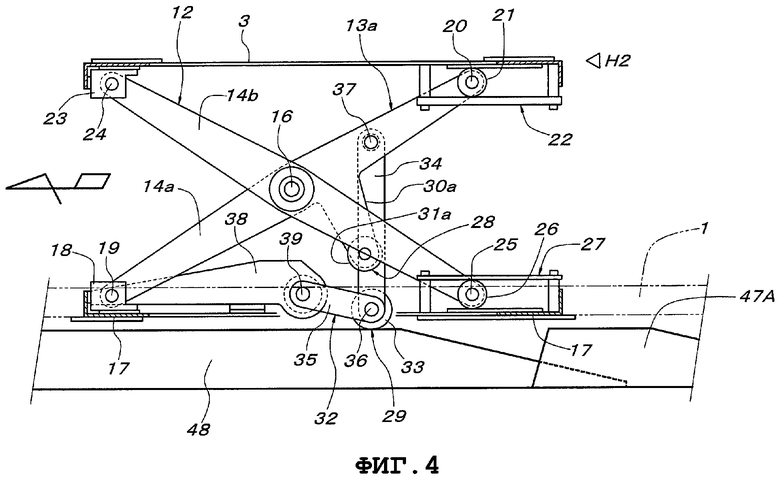
Фиг.4 - вид сбоку в продольном сечении главной части, причем платформа расположена на максимальной высоте;
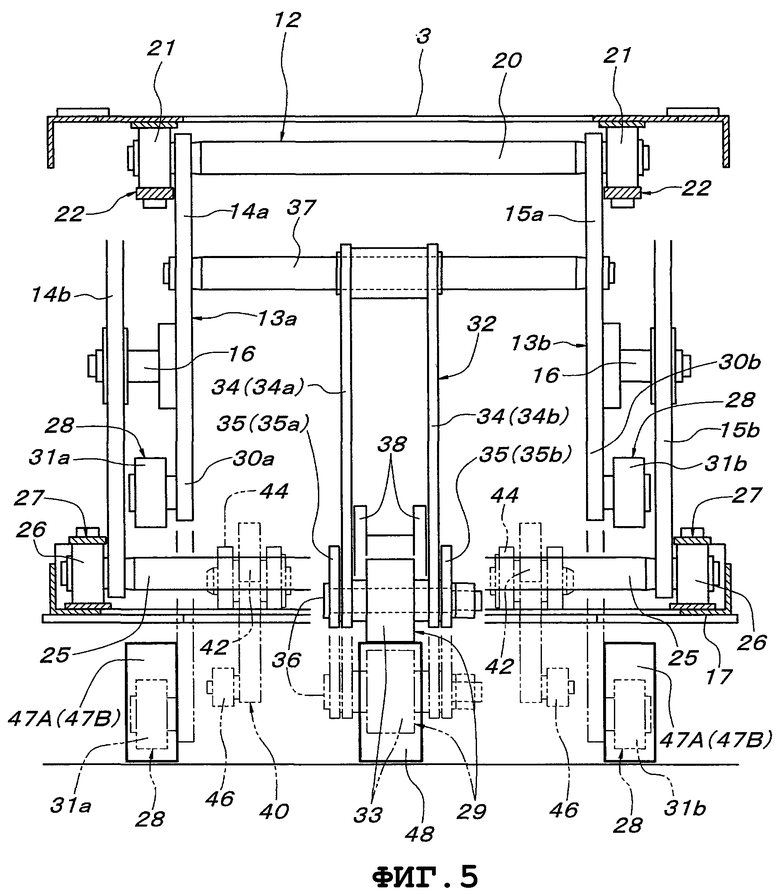
Фиг.5 - виз сзади в поперечном сечении главной части, причем платформа поднята на максимальную высоту;
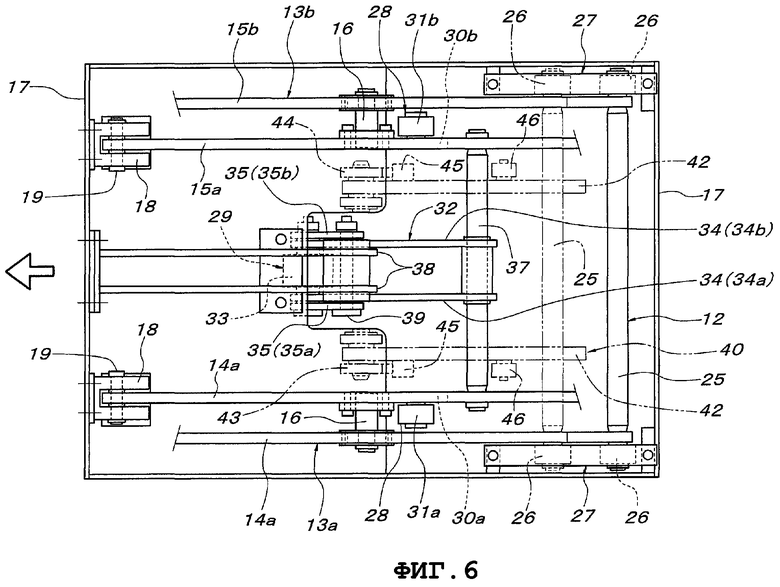
Фиг.6 - вид сверху в поперечном сечении главной части, причем платформа расположена на предельной нижней высоте;
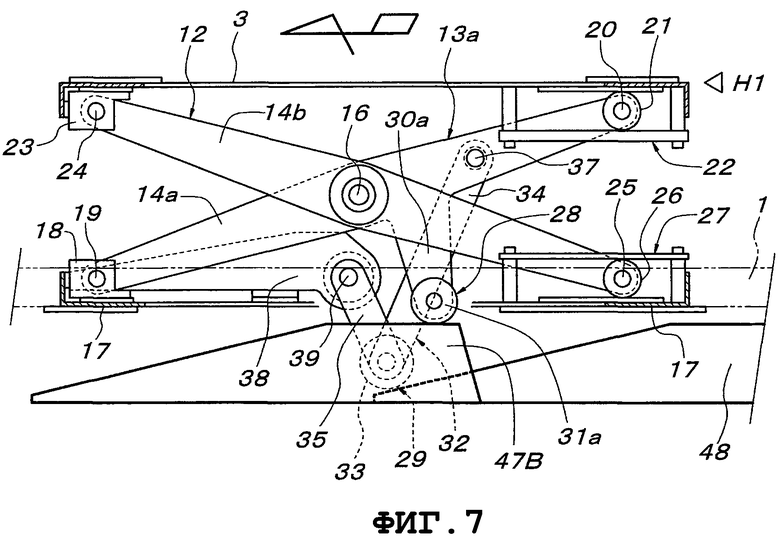
Фиг.7 - вид сбоку в продольном сечении главной части, причем платформа опущена на промежуточную высоту;
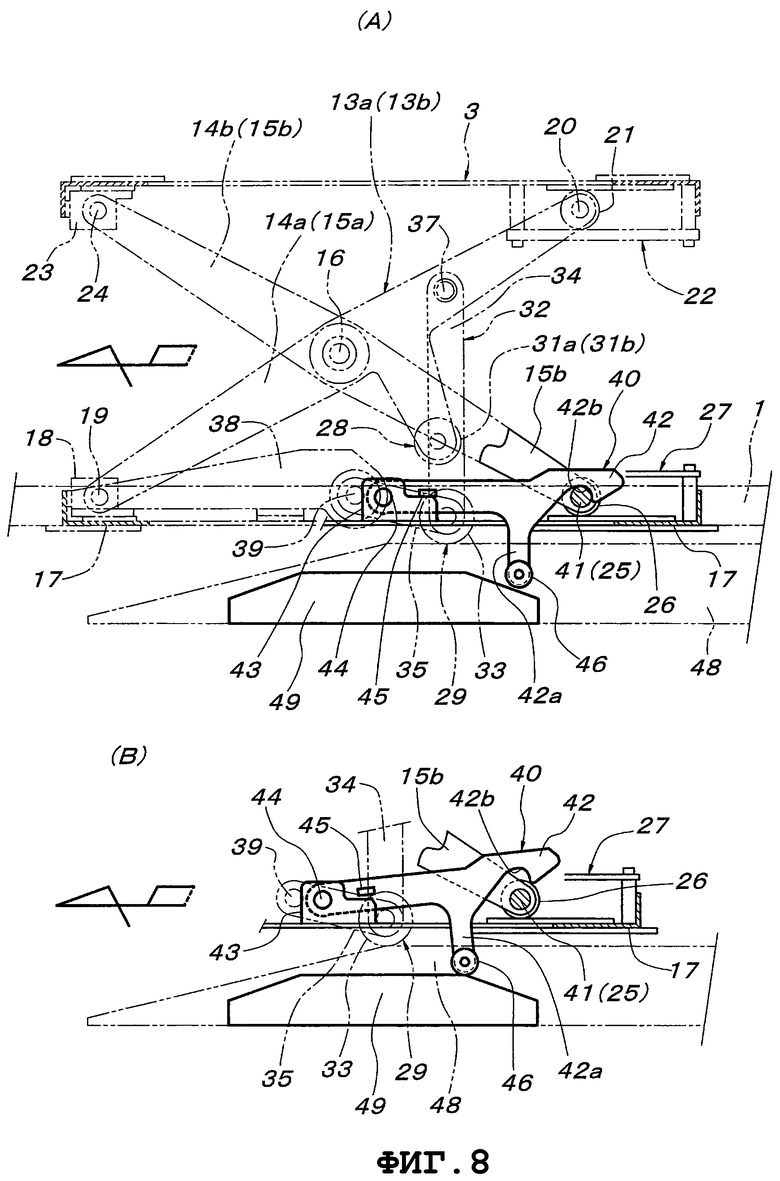
Фиг.8А - частичный вид сбоку в продольном сечении запирающего средства в запертом положении; и
Фиг.8В - частичный вид сбоку в продольном сечении запирающего средства в разомкнутом положении.
Описание предпочтительных вариантов осуществления изобретения
Далее следует подробное описание настоящего изобретения со ссылками на прилагаемые чертежи. На фиг.1 показан пример базовой конфигурации транспортирующего устройства с фрикционным приводом со свободно поднимающейся и опускающейся платформой. Ссылочной позицией 1 обозначена плоская прямоугольная транспортная тележка, движущаяся в направлении транспортировки, которая оснащена комплектами передних и задних пар правых и левых колесных узлов 2а - 2d и свободно поднимающейся и опускающейся платформой 3. Соответствующие колесные узлы 2а-2d имеют колеса 5, которые катятся по правой и левой направляющим рельсам 4а и 4b, которые уложены вдоль маршрута транспортировки, при этом на двух переднем и заднем колесных блоках 2а и 2с на правой и на левой сторонах (в показанном примере на левой стороне) имеются предотвращающие вибрацию ролики 6, установленные на вертикальных осях и зажимающие направляющий рельс 4а справа и слева. Транспортная тележка 1 приводится в движение фрикционными приводными средствами 7, одновременно расположенными в соответствующих точках вдоль маршрута транспортировки. Фрикционные приводные средства 7 хорошо известны и содержат приводное фрикционное колесо 9, которое упирается в одну фрикционную поверхность 8а из пары фрикционных поверхностей 8а и 8b, расположенных справа и слева и образованных параллельно на транспортной тележке 1 по всей ее длине, двигатель 10 для приведения во вращение фрикционного колеса 9 и реактивный ролик 11, который упирается в другую фрикционную поверхность 8b для зажатия транспортной тележки 1 между собой и приводным фрикционным колесом 9.
Хотя в качестве примера средства, приводящего в движение транспортную тележку 1, показано фрикционное приводное средство 7, можно использовать любой другой способ приведения в движение тележки например, привод, по меньшей мере, одного из колес 5 двигателем или использовать приводную цепь в натянутом состоянии для перемещения транспортной тележки 1 по пути транспортировки вместе с цепью. Дополнительно, так как при использовании фрикционного приводного средства 7 необходимы вертикальные фрикционные поверхности 8а и 8b, то правую и левую боковые стороны транспортной тележки 1 можно оставить такими, какие они есть, либо к ним можно прикрепить другие элементы. Кроме того, хотя в качестве транспортных тележек 1 использовались индивидуальные независимые тележки, транспортирующее устройство может быть единым, на котором платформы 3 расположены с соответствующими интервалами на транспортирующей ленте 1, проходящей непрерывно как в пластинчатом конвейере.
Платформа 3 является столом, на котором установлен транспортируемый объект, причем она установлена с возможностью вертикального перемещения рычажным механизмом 12, расположенным под платформой 3 между ней и транспортной тележкой 1. Рычажный механизм 12 состоит из двух пантографов 13а и 13b, установленных параллельно транспортному маршруту вблизи друг друга под платформой 3.
Детали рычажного механизма 12 показаны на фиг.2 - 5. Рычажный механизм 12 содержит пару из правого и левого пантографов 13а и 13d, которые содержат две пары рычагов 14а и 14b и 15а и 15b, центральные пересекающиеся части которых установлены шарнирно на взаимно концентричных центральных осях 16. Передние концевые участки внутренних рычагов 14а и 15а шарнирно установлены с возможностью свободного поворота вверх и вниз на взаимно концентричных осях 19 с фиксированным положением на правом и левом опорных элементах 18, установленных на опорной раме 17 на стороне транспортной тележки 1. Задние концевые участки обоих рычагов 14а и 15а соединены с общей скользящей осью 20, на обоих концах которой установлены ролики 21, вставленные для перемещения вперед и назад в направляющие 22, которые расположены снизу на заднем концевом участке платформы 3, при этом ролики выполнены с возможностью качения вперед и назад. Передние концевые участки обоих внешних рычагов 14b и 15b установлены шарнирно с возможностью свободного поворота на взаимно концентричных осях 24, имеющих фиксированное положение, на правом и левом опорных участках 23, расположенных на нижней стороне переднего концевого участка платформы 3, в положении непосредственно над правым и левым опорными участками 18. Задние концевые участки обоих рычагов 14b и 15b соединены общей скользящей осью 15, на обоих концах которой съемно установлены ролики 26, вставленные для перемещения вперед и назад в левую и правую направляющие 27, которая установлена на опорной раме 17 на стороне транспортной тележки 1 в положении, находящемся непосредственно под направляющими 22, при этом ролики 26 выполнены с возможностью качения вперед и назад.
В рычажном механизме 12 имеются одновременно первый приводной узел 28 и второй приводной узел 29. Первый приводной узел 28 состоит из роликов 31а и 31b кулачкового следящего элемента, установленных на горизонтальных осях, взаимно концентрических c нижними концами выступающих участков 30а и 30b, которые выполнены заодно с рычагами 14а и 15а и отходят от них вниз для расположения внутри рычагов 14а-15b, образующих левый и правый пантографы. Выступающие участки 30а и 30b выступают вниз из среднего положения между центральными осями 16 обоих рычагов 14а и 15а и общей скользящей осью 20 из положения, расположенного вблизи центральных осей 16, и имеют такую конструкцию, что когда платформа 3 находится в предельном опущенном положении, как показано на фиг.2, ролики 31а и 31b кулачкового следящего элемента находятся в положении, близком к полу, выступая вниз из транспортной тележки 1.
Второй приводной узел 29 состоит из одного ролика 33 кулачкового следящего элемента, установленного на коленном рычаге 32, который имеется в рычажном механизме 12. Коленный рычаг 32 образован путем соединения друг с другом длинного рычага 34 и короткого рычага 35 на средней оси 36 перегиба. Соответствующие рычаги 34 и 35 состоят из левого и правого рычагов 34а и 34b и левого и правого рычагов 35а и 35b соответственно, а ролик 33 кулачкового следящего элемента съемно установлен на средней оси 36 перегиба между рычагами 34а и 34b длинного рычага 34, расположенными внутри. Коленный рычаг 32 расположен приблизительно в центре между левым и правым пантографами 13а и 13b. Свободный конец длинного рычага 34 шарнирно закреплен в среднем положении между центральными осями 16 внутренних рычагов 14а и 15а, входящих в пантографы 13а и 13b, и общей скользящей осью 20 на имеющем форму вала (шпинделя) подвесном элементе 37, подвешенном между рычагами 14а и 15а и проходящем поперечно в горизонтальном направлении. Свободный конец короткого рычага 35 шарнирно закреплен на опорном элементе 38, выполненном как выступ рамы 17 на стороне транспортной тележки 1, шпинделем 39, расположенным под центральными осями 16 пантографов 13а и 13b.
Как показано штриховыми линиями на фиг.5, 6, 8А и 8В, в рычажном механизме 12 одновременно может быть установлено запирающее средство 40, которое поддерживает платформу 3 на максимальной высоте. Запирающее средство 40 содержит правую и левую защелки 42, которые в качестве запираемых участков 41 используют общую скользящую ось 25, подвешенную между внешними рычагами 14а и 15b, входящими в пантографы 13а и 13b, и автоматически запирают участки 41. Соответствующие защелки 42 имеют идентичную конструкцию и расположены слева и справа от второго приводного узла 29, размещаясь в середине между левым и правым роликами 31а и 31b первого приводного узла 28 и единственным роликом 33 второго приводного узла 29. Эти защелки соответственно установлены на горизонтальных шпинделях 44, взаимно концентрично с опорными элементами 43, выполненными на опорной раме 17 транспортной тележки 1, и выполнены с возможностью свободного поворота вверх и вниз, при этом упорные элементы 45, прикрепленные к соответствующим защелкам 42, удерживаются силой тяжести в исходном положении на опорных элементах 43. Кроме того, в соответствующих защелках 42 заодно с ними выполнены рычаги 42а, выступающие вниз, при этом на нижних концах рычагов 42а посредством правого и левого взаимно концентричных горизонтальных шпинделей установлены ролики 46 кулачковых следящих элементов. Ролики 46 выступают вниз за нижнюю поверхность транспортной тележки 1.
Платформа 1 нормально стабильно находится в нижнем предельном положении, показанном на фиг.2. В это время нижнюю предельную высоту платформы 3 можно определить опорным инструментом с регулируемой высотой (который хорошо известен и его иллюстрация опускается), установленным в стоячем положении на боковой стороне транспортной тележки 1. Если платформа 3 расположена на этой нижней предельной высоте, то пара пантографов 13а и 13b рычажного механизма 12 сложены, как показано на фиг.2, а правый и левый ролики 31а и 31b кулачковых следящих элементов первого приводного узла 28 выступают из нижней поверхности транспортной тележки 1 на максимальное расстояние. Ролик 33 кулачкового следящего элемента второго приводного узла 29 находится почти на том же уровне, что и ролики 31а и 31b кулачкового следящего элемента первого приводного узла 28, а коленный рычаг 32, на котором установлен ролик 33, сложен так, что оси его свободных концов (подвешенный элемент (шпиндель) 37 и шпиндель 39) обоих рычагов 34 и 35 расположены сзади от ролика 33 относительно направления движения транспортной тележки 1. Соответственно в этом состоянии невозможно вытолкнуть ролик 33 кулачкового следящего элемента вверх, чтобы поднять пантографы 13а и 13b.
С другой стороны, на начальной части конкретного участка, на котором платформа 3 удерживается поднятой при движении транспортной тележки 1, как показано на фиг.5, уложены правая и левая первые криволинейные направляющие 47А, которые выталкивают правый и левый ролики 31а и 31b первого приводного узла 28 вверх в результате движения вперед транспортной тележки 1, а на конечной части этого конкретного участка, как показано на фиг.7, установлены правая и левая первые криволинейные направляющие 47В, которые принимают опускающиеся правый и левый ролики 31а и 31b первого приводного узла 28, а затем позволяют этим роликам 31а и 31b опуститься по направляющей в результате движения транспортной тележки 1. Кроме того, на конкретном участке, от положения, находящегося рядом с конечной частью начальных первых криволинейных направляющих 47А, до положения, находящегося рядом с начальной частью конечных криволинейных направляющих 47В, уложена вторая криволинейная направляющая 48, которая выталкивает вверх ролик 33 кулачкового следящего элемента второго приводного узла 29 в результате движения вперед транспортной тележки 1 и удерживает этот ролик на заданной высоте.
Следовательно, когда транспортная тележка 1 входит на заданный участок, левый и правый ролики 31а и 31b кулачковых следящих элементов первого приводного узла 28 постепенно поднимаются по правой и левой криволинейных направляющим 47 начального участка, как показано на фиг.3, и эта пара криволинейных направляющих 47А начального участка выталкивают внутренние рычаги 14а и 15а правого и левого пантографов 13а и 13b через ролики 31а и 31b. Соответственно правый и левый пантографы 13а и 13b поднимаются одновременно, так что платформа 3, установленная на правом и левом пантографах 13а и 13b, поднимается, сохраняя горизонтальное положение.
Как показано на фиг.3, в результате того, что правый и левый ролики 31а и 31b достигают наивысших плоских поверхностей правой и левой начальных криволинейных направляющих 47А, платформа 3 достигает заданной промежуточной высоты Н1; однако во время подъема пантографов 31а и 13b, когда платформа 3 поднимается с нижней предельной высоты до промежуточной высоты (Н1), коленный рычаг 32 из сложенного состояния, показанного на фиг.2, немного распрямляется и принимает V-образную конфигурацию, а ролик 33 кулачкового следящего элемента смещается назад, почти сохраняя высоту, что приводит к состоянию, когда оси свободных концов (подвесной элемент (шпиндельный элемент) 37 и шпиндель 39) коленных рычагов 32 отделяются от ролика 33 спереди и сзади. Следовательно, в этом состоянии, посредством выталкивания вверх роликов 33 можно дальше распрямлять коленный рычаг 32, чтобы пантографы 13а и 13b продолжили подъем.
Вторая криволинейная направляющая 48 уложена так, что ролик 33 кулачкового следящего элемента второго приводного узла 29 начинает катиться по второй криволинейной направляющей 48, в то время как ролики 31а и 31b кулачкового следящего элемента еще катятся по наивысшим плоским поверхностям начальной криволинейной направляющей 47А. Разумеется, наивысшие плоские поверхности можно, по существу, удалить с начальных криволинейных направляющих 47А, чтобы ролик 33 кулачкового следящего элемента второго приводного узла 29 начинал катиться по второй криволинейной направляющей 48 непосредственно перед тем, как ролики 31а и 31b сойдут с наивысших положений на начальной первой криволинейной направляющей 47А.
Следовательно, когда ролик 33 кулачкового следящего элемента второго приводного узла 29 постепенно поднимается по второй криволинейной направляющей 48 в результате движения транспортной тележки 1, короткий рычаг 35 коленного рычага 32 поворачивается вверх вокруг шпинделя 39, а длинный рычаг 34 упирается в пантографы 13а и 13b через подвесной элемент (шпиндельный элемент) 37 и заставляет их подниматься дальше. Следовательно, когда ролик 33 кулачкового следящего элемента достигнет наивысшей плоской поверхности на второй криволинейной направляющей 48, пантографы 13а и 13b полностью поднимутся, и платформа 3 будет поднята с промежуточной высоты Н1 на максимальную высоту Н2.
Как описано выше, когда пантографы 13а и 13b осуществляют движение подъема для поднятия платформы 3, соответствующие верхняя и нижняя общие скользящие оси 20 и 25 правого и левого пантографов 13а и 13b горизонтально смещаются вперед на роликах 21 и 26 в направляющих 22 и 27. Однако если в устройстве имеется запирающее средство 40, показанное штриховыми линиями на фиг.6, 8А и 8В, то непосредственно перед тем, как платформа 3 достигнет максимальной высоты Н2, нижняя общая скользящая ось 25 (запираемые участки 41) при движении выталкивает вверх правую и левую защелки благодаря наклонным поверхностям на нижней стороне их передних концов, а когда платформа 3 достигает максимальной высоты Н2, то есть когда ролик 33 кулачкового следящего элемента второго приводного узла 29 достигает наивысшей плоской поверхности второй криволинейной направляющей 48, вогнутые запирающие участки 42b правой и левой защелок 42 сверху под действием силы тяжести принимают и запирают нижнюю общую скользящую ось 25 (запираемые участки 41). Разумеется, можно использовать и пружины для принудительного приведения в действие защелок 42.
В частности, если устройство снабжено запирающим средством 40, когда транспортная тележка 1 входит на конкретный участок, то платформа 3, расположенная на нижней предельной высоте, автоматически поднимается на максимальную высоту Н2. В это время, как описано выше, защелки 42 запирающего средства 40 автоматически запирают запираемые участки 41 (нижнюю скользящую ось 25) пантографов 13а и 13b для предотвращения падения поднятых пантографов 13а и 13b. То есть вогнутые запирающие участки 42b обеих защелок 42, в которые попадает общая скользящая ось 25 (запираемые участки 41), предотвращают обратное скольжение общей скользящей оси 25 (запираемых участков 41) поднятых пантографов 13а и 13b, когда платформа 3 опускается с максимальной высоты Н2. Следовательно, даже если коленный рычаг 32, на котором установлен ролик 33 кулачкового следящего элемента, вытолкнутый вверх второй направляющей 48, изогнется или сломается, когда транспортная тележка 1 перемещается по конкретному участку с платформой 3, поднятой на максимальную высоту 3, предотвращается падение платформы 3 с максимальной высоты Н2.
Непосредственно перед конечной частью конкретного участка, как показано на фиг.8А и 8В, установлены отпирающие кулачки 49. Отпирающие кулачки 49 расположены справа и слева от второй криволинейной направляющей 48 в соответствии с положением защелок 42 так, что ролики 46 кулачковых следящих элементов защелок 42 попадают на них при движении транспортной тележки. Ролики 46 кулачковых следящих элементов движутся по отпирающим кулачкам 49 так, чтобы повернуть защелки 42 вверх против действия силы тяжести, при этом вогнутые запирающие участки 42b защелок 42 отходят вверх от общей скользящей оси 25 (запираемых участков 41) пантографов 13а и 13b и отпирают поднятые пантографы 13а и 13b.
После операции отпирания, описанной выше, транспортная тележка 1 достигает концевой части конкретного участка, и ролик 33 второго приводного узла 29 готов опускаться по наклонному участку второй криволинейной направляющей 48 при продолжении движения транспортной тележки 1, чтобы опустить платформу 3 и чтобы пантографы 13а и 13b сложились под воздействием силы тяжести. Следовательно, как показано на фиг.7, когда платформа 3 достигает промежуточной высоты Н1 при движении транспортной тележки 1, то есть непосредственно перед тем, как ролик 33 кулачкового следящего элемента сойдет со второй криволинейной направляющей 48, правый и левый ролики 31а и 31b первого приводного узла 28 захватываются наивысшими плоскими поверхностями правой и левой конечных криволинейных направляющих 47В, и эти ролики 31а и 31b готовы опуститься по наклонным участкам этих направляющих 47 В при дальнейшем движении транспортной тележки 1, так что платформа 3 продолжает опускаться с промежуточной высоты Н1, и пантографы 13а и 13b продолжают складываться под действием силы тяжести. Затем транспортная тележка 1 выходит с конкретного участка, ролики 31а и 31b сходят с концевых первых криволинейных направляющих 47В, и пантографы 13а и 13b полностью складываются, так что платформа 3 возвращается в положение нижней предельной высоты, которое является исходным.
На маршруте транспортировки транспортной тележки 1 можно выполнить первый заданный участок, на котором платформа 3 удерживается поднятой на максимальную высоту Н2, и второй заданный участок, на котором платформа 3 удерживается поднятой на промежуточную высоту Н1. В этом случае путем образования первого участка, как описано выше, и соединения на втором заданном участке правой и левой начальных первых криволинейных направляющих 47А и правой и левой конечных первых криволинейных направляющих 47В на всей длине второго заданного участка можно создать состояние, когда платформа 3 вытолкнута вверх на промежуточную высоту парой роликов 31а и 31b приводного узла 28 на всей длине второго заданного участка.
Хотя в примере использованы правый и левый пантографы 13а и 13b, можно установить платформу 3 с возможностью подъема и опускания на единственном пантографе большой ширины. Другими словами, количество пантографов, на которых установлена платформа 3, не ограничено. Кроме того, в качестве первого приводного узла можно использовать известный поднимающий/опускающий элемент, который прилагает осевое усилие к пантографу, поднимая его.
Транспортирующее устройство согласно настоящему изобретению может использоваться на автомобильном сборочном конвейере в качестве транспортного устройства для перемещения кузова автомобиля (транспортируемого объекта), на который крепятся различные узлы, при этом удерживая кузов, установленный на платформе 3, при различных сборочных операциях (конкретный участок описан для варианта, где проложена вторая криволинейная направляющая 48) на такой высоте, на которой можно удобно проводить операцию сборки.
Изобретение относится к транспортирующему устройству, выполненному с возможностью выборочного перемещения платформы, установленной на транспортной тележке с возможностью подъема и опускания с помощью подъемных пантографов, при этом подъем осуществляется криволинейной направляющей, установленной сбоку от маршрута транспортировки. Устройство содержит платформу, установленную с возможностью подъема/опускания с помощью пантографа на транспортной тележке, две криволинейные направляющие. Первая криволинейная направляющая воздействует на первый приводной узел для подъема платформы на промежуточную высоту. Вторая криволинейная направляющая воздействует на второй приводной узел для подъема платформы с промежуточной высоты на максимальную высоту. Технический результат направлен на обеспечение максимальной необходимой высоты платформы при существенном снижении высоты верхней поверхности транспортной тележки с низким полом. 5 з.п. ф-лы, 8 ил.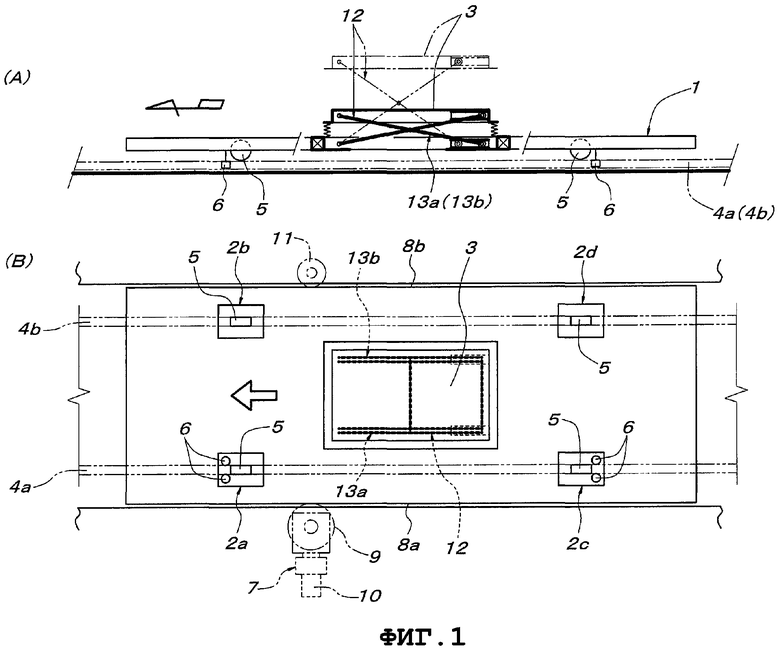
| JP 2003191875 А, 09.07.2003 | |||
| JP 7172538 А, 11.07.1995 | |||
| JP 54140373 A, 31.10.1979 | |||
| Подъемник | 1988 |
|
SU1586994A1 |

