Настоящее изобретение относится к транспортирующему устройству с винтовым приводом для привода и перемещения транспортной тележки путем зацепления ходового винта для привода транспортной тележки, находящейся на стороне пути перемещения, с копирным роликом, находящимся на стороне транспортной тележки.
Транспортирующее устройство с винтовым приводом, т.е. устройство, в котором приводимый во вращение ходовой винт установлен вдоль пути перемещения транспортной тележки, транспортная тележка снабжена копирным роликом, находящимся в зацеплении с ходовым винтом, и транспортная тележка приводится в движение вращением ходового винта, хорошо известно, как описано в опубликованной, не рассмотренной заявке на патент Японии № 1997-58463 (далее именуемой «Патентный документ 1») и пр. Более того, в транспортном устройстве такого типа, когда длина пути движения транспортной тележки велика, необходимо последовательно и концентрично установить множество ходовых винтов, согласовав фазы спиральных ребер соответствующих ходовых винтов, при этом ходовые винты функционально соединены так, что они функционально вращаются в одном направлении с одинаковой частотой. Однако между соответствующими ходовыми винтами, расположенными последовательно, нужно установить подшипники на обоих концах каждого ходового винта и трансмиссионное средство между ходовыми винтами, и поэтому между винтами нужно оставлять довольно длинный зазор. Конструкция должна быть выполнена так, чтобы копирный ролик, находящийся на транспортной тележке, плавно переходил с текущего ходового винта на следующий, независимо от наличия такого зазора, при этом транспортная тележка должна надежно двигаться непрерывно, а не прерывисто.
Кроме того, транспортное устройство с винтовым приводом, описанное в Патентном документе 1, выполнено так, что копирный ролик на стороне транспортной тележки толкается сзади спиральными ребрами ходовых винтов в направлении движения транспортной тележки. При такой конфигурации копирный ролик на транспортной тележке может плавать в осевом направлении ходового винта между спиральными ребрами ходовых винтов и, поэтому, существует вероятность того, что движущаяся транспортная тележка будет совершать колебания вперед и назад в результате вибрации и пр. В качестве средства решения этой проблемы, как описано в опубликованной, не рассмотренной заявке на патент Японии № 2001-106452 (далее именуемой «Патентный документ 2»), и пр., спиральным ребрам ходовых винтов придают форму двойного ребра, в которой копирный ролик на транспортной тележке охвачен с обеих сторон в осевом направлении ходового винта.
Кроме того, ходовые винты, показанные в Патентном документе 1, выполнены так, что спиральные ребра установлены на одном центральном валу, проходящем по всей длине ходового винта, и эти спиральные ребра проходят непрерывно по всей длине центрального вала. Однако когда длину единого ходового винта стремятся максимально увеличить, с точки зрения производственных издержек непрактично изготавливать такой ходовой винт, в котором спиральное ребро, проходящее по всей длине ходового винта, крепят к длинному центральному валу. Поэтому, как описано в Патентном документе 2, можно соединять в осевом направлении отдельные отрезки ходового винта стандартной длины, чтобы получить ходовой винт требуемой длины.
Проблема, решаемая изобретением
Обычной и общеизвестной конструкцией, решающей вышеописанную проблему, является конструкция, в которой на транспортной тележке используют передний и задний копирные ролики, находящиеся в зацеплении с ходовым винтом с интервалом, превышающим зазор между идентичными ходовыми винтами, и когда передний копирный ролик движется в зазоре между ходовыми винтами, транспортную тележку приводит в движение и перемещает задний копирный ролик. Хотя в такой конструкции не возникает проблем, когда транспортная тележка движется с постоянной скоростью по всей длине пути своего перемещения, образованного последовательно установленными ходовыми винтами, другими словами, когда шаг таких ходовых винтов является постоянным, при попытке применить такую конструкцию в случаях, когда шаг ходовых винтов на определенном участке изменяется, т.е. при попытке применить такую конструкцию в случаях, когда скорость перемещения транспортной тележки на определенном участке может изменяться, при том что все ходовые винты вращаются с постоянной частотой, пара из переднего и заднего копирных роликов входит в зацепление с двумя (передним и задним) участками, имеющими разный шаг, и транспортная тележка не может перемещаться между участками с разным шагом.
Кроме того, как описано в Патентном документе 2, даже когда спиральные ребра ходового винта имеют двухреберную конструкцию, необходимо оставить соответствующий зазор (люфт) между копирным роликом на транспортной тележке и ребрами, между которыми вставлен копирный ролик. Даже когда ходовой винт успешно изготовлен с высокой точностью так, что размер этого зазора минимален, невозможно полностью устранить плавание (биения) транспортной тележки в направлении вперед и назад из-за наличия такого минимально необходимого зазора. Следовательно, когда транспортное устройство такой конструкции используется как транспортное устройство для перемещения деталей на линии нанесения покрытий, на которой на деталь, находящуюся на транспортной тележке, автоматически наносят покрытие, существует риск возникновения дефектов покрытия, вызванных даже небольшими биениями (из-за вибраций и пр.) в направлении вперед и назад транспортной тележки (детали).
Кроме того, как описано в Патентном документе 2, когда применяется способ, согласно которому изготавливают множество отдельных ходовых винтов так, что спиральные ребра просто прикрепляют к центральному валу стандартной длины, и эти ходовые винты стандартной длины соединяют в осевом направлении, чтобы получить ходовой винт требуемой длины, прочность на изгиб всех тел ходового винта зависит от прочности на изгиб соединения между отдельными телами ходового винта. Это обусловливает необходимость применения сложной конструкции для повышения прочности на изгиб такого соединения, например, увеличивая глубину посадки отдельных тел ходового винта, или применяя подобные способы. Даже если отдельные тела ходового винта успешно соединены с помощью соединения, имеющего достаточную прочность на изгиб, практически невозможно увеличить общую длину собранного отдельного ходового винта. Таким образом, на длинном пути перемещения транспортной тележки приходится последовательно устанавливать большее количество ходовых винтов такой конструкции.
Первой целью настоящего изобретения является создание транспортного устройства с винтовым приводом, способного решить вышеописанные известную проблему невозможности создания конструкции с изменением шага винта на конкретном участке пути. Транспортное устройство с винтовым приводом по первому варианту настоящего изобретения, направленное на достижение первой цели, имеет конструкцию, в которой (для справки, элементам описываемых ниже вариантов присвоены ссылочные позиции и буквы): приводимые во вращение ходовые винты 1А, 1В, 1С… установлены вдоль пути перемещения транспортной тележки 2; транспортная тележка 2 снабжена копирным роликом 14, находящимся в зацеплении с ходовыми винтами 1А, 1В, 1С…; и транспортная тележка 2 приводится в движение вращающимися ходовыми винтами 1А, 1В, 1С…, при этом множество ходовых винтов 1А, 1В, 1С… установлены концентрично и с зазорами 5 между соответствующими ходовыми винтами 1А, 1В, 1С…; сбоку от примыкающего к зазору 5 конца одного из двух ходовых винтов 1А, 1В, 1С…, расположенных до и после зазора 5 между ходовыми винтами, в непосредственном соседстве с ходовыми винтами 1А, 1В, 1С…, установлены более короткие вспомогательные ходовые винты 6А, 6В…, при этом вспомогательные ходовые винты 6А, 6В… приводятся во вращение в функциональном соединении с ходовыми винтами 1А, 1В, 1С… и имеют такой же шаг винта, что и соседние ходовые винты 1А, 1В, 1С…, при этом транспортная тележка 2, в дополнение к копирному ролику 14, снабжена вспомогательным копирным роликом 16, находящимся в зацеплении с вспомогательными ходовыми винтами 6А, 6В…, при этом интервал D в осевом направлении ходового вала между копирным роликом 14 и вспомогательным копирным роликом 16 и длина вспомогательных ходовых винтов 6А, 6С… выбраны такими, что когда копирный ролик 14 движется в зазоре 5 между ходовыми винтами, вспомогательный копирный ролик 16 находится в зацеплении с вспомогательными ходовыми винтами 6А, 6В….
В конструкции по первому варианту настоящего изобретения рядом с ходовыми винтами у зазоров на пути транспортировки между ходовыми винтами просто установлены вспомогательные ходовые винты, а на транспортной тележке к основному копирному ролику просто добавлен один вспомогательный копирный ролик, расположенный не на одной оси с основным. Благодаря такой простой конструкции, когда копирный ролик движется в зазоре между ходовыми винтами, транспортная тележка может приводиться в движение и перемещаться вспомогательным копирным роликом и вспомогательным ходовым винтом. Таким образом, независимо от наличия зазора между ходовыми винтами, транспортная тележка может перемещаться и приводиться в движение непрерывно. Более того, на переходном участке, проходящем между началом и концом зазора между ходовыми валами, т.е. на участке, содержащем один дополнительных ходовой винт, один зазор между ходовыми винтами и концевые участки и переднего, и заднего ходовых винтов, примыкающие к зазору, транспортная тележка должна перемещаться с постоянной скоростью, без изменения шага соответствующих ходовых винтов. Однако если распознается участок, не являющийся переходным участком, с ходовыми винтами просто вводится в зацепление один копирный ролик. Следовательно, когда на участке, не являющемся переходным, проходит граница между двумя (передним и задним) участками с разным шагом винта, скорость перемещения транспортной тележки в середине пути движения также можно изменять.
При реализации настоящего изобретения можно использовать две конкретные конфигурации А и В.
Конфигурация А
Концы соответствующих ходовых винтов 1А, 1В, 1С…, примыкающие к зазорам 5, можно функционально соединять друг с другом двумя трансмиссионными средствами 9, 10, через зазоры 5 между концами ходовых винтов через вспомогательные ходовые винты 6А, 6В….
Конфигурация В
Кроме того, в конфигурации по первому варианту настоящего изобретения, на участке, не являющемся переходным участком В1 и В2, проходящим через передний и задний концы зазора 5 между ходовыми винтами, т.е. переходным участком В1, и В2, включающим один вспомогательный ходовой винт 6А, 6В…, один зазор 5 между ходовыми винтами, и концевые участки переднего и заднего ходовых винтов 1А, 1В, 1С…, примыкающие к зазору 5, один копирный ролик 14 просто находится в зацеплении с ходовыми винтами 1А, 1В, 1С…. Поэтому конструкция может быть такой, чтобы шаг Р1 или Р2 ходовых винтов 1А, 1В, 1С… в пределах переходных участков В1 и В2 не менялся. В положении, не являющемся таким переходным участком В1 и В2, можно поместить границу между двумя (передним и задним) участками А1 и А2…, отличающимися по шагу ходовых винтов 1А, 1В, 1С…, а шаг Р1 и Р2 ходовых винтов 1А, 1В, 1С… на переходных участках В1 и В2 можно задать как кратную часть интервала D в осевом направлении ходового винта между копирным роликом 14 и вспомогательным копирным роликом 16.
В конфигурации А вспомогательный ходовой винт можно использовать как промежуточный вал для соединения соответствующих ходовых винтов, и все ходовые винты и вспомогательные ходовые винты могут быть функционально соединены трансмиссионными средствами, имеющими относительно простую конструкцию.
В конфигурации В, где имеется множество переходных участков, содержащих один вспомогательный ходовой винт, один зазор между ходовыми винтами, и концевые участки обоих переднего и заднего ходовых винтов, примыкающие к зазору, и если шаг винта задан как кратная часть интервала между копирным роликом и вспомогательным копирным роликом, шаг винта на переходном участке можно менять при необходимости. Следовательно, в комбинации с размещением границы между двумя (передним и задним) участками с разным шагом ходового винта в положении, не являющимся переходным участком, можно произвольно создавать множество участков, на которых транспортная тележка движется с разной скоростью на пути своего движения, включая соответствующие переходные участки.
Кроме того, транспортирующее устройство с винтовым приводом по второму варианту настоящего изобретения, который направлен на достижение первой цели, имеет конструкцию, в которой (для справки, элементам описываемых ниже вариантов присвоены ссылочные позиции и буквы): приводимые во вращение ходовые винты расположены вдоль пути перемещения транспортной тележки; транспортная тележка снабжена копирным роликом, находящимся в зацеплении с ходовыми винтами; и транспортная тележка приводится в движение вращением ходовых винтов, при этом множество ходовых винтов установлены концентрично и последовательно с зазорами 33 между соответствующими ходовыми винтами 21А, 21В, 21С…, на транспортной тележке 22 передний и задний копирные ролики 25 и 26, вставленные между спиральными ребрами 21а и 21b в двух положениях, которые являются передним и задним положениями в осевом направлении ходовых винтов 21А, 21В, 21С…, установлены шарнирно с интервалом D, который больше длины зазора 33 между ходовыми винтами, при этом положение одного копирного ролика 26 является фиксированным, а второй копирный ролик 25 является подвижным и выполнен с возможностью свободного перемещения между активным положением, вставленным между спиральными ребрами 21а и 21b ходовых винтов 21А, 21В, 21С…, и неактивным положением, выведенным из канавки между спиральными ребрами 21а, 21b; удерживающее средство 40 для удержания подвижного копирного ролика 25 в неактивном положении, расположенное в зазоре 33 между ходовыми винтами, переключающее средство 43 для временного переключения подвижного копирного ролика из неактивного положения в активное положение, и когда копирный ролик 26 переходит с ходовых винтов 21А, 21В, 21С…, расположенных перед зазором 33 на ходовые винты 21А, 21В, 21С…, расположенные после этого зазора, подвижный копирный ролик 25 вставляется в ходовые винты 21А, 21В, 21С… перед зазором 33 или после него.
В конструкции по второму варианту настоящего изобретения на стороне пути перемещения ходовой винт не требует оснащения иным, специальным приводным средством для привода и перемещения транспортной тележки в зазоре, кроме множества ходовых винтов, установленных концентрично и последовательно с зазором между ними. Кроме того, на тележку можно добавить лишь один подвижный копирный ролик, выполненный с возможностью выборочного переключения между двумя положениями. Несмотря на то что вся конструкция является простой, и может быть реализована с очень небольшими затратами, когда копирный ролик с фиксированным положением движется в зазоре между ходовыми винтами, транспортную тележку можно перемещать и приводить в движение этим дополнительным подвижным копирным роликом и ходовым винтом. Таким образом, независимо от наличия зазора между ходовыми винтами транспортную тележку можно приводить в движение непрерывно. Кроме того, на переходном участке, проходящем через передний и задний концы зазора между ходовыми винтами, т.е. на переходном участке, содержащем один зазор между ходовыми винтами и переключающее средство, установленное в нем, транспортная тележка должна иметь конструкцию, позволяющую перемещать ее с постоянной скоростью без изменения шага соответствующих ходовых винтов. Однако если будет обнаружен участок, не являющийся переходным участком, копирный ролик, имеющий фиксированное положение, просто входит в зацепление с ходовыми винтами. Следовательно, когда на участке, не являющемся переходным участком, имеется граница между двумя (передним и задним) участками с разным шагом винта, скорость движения транспортной тележки на середине пути движения также может меняться.
При реализации второго варианта настоящего изобретения можно использовать следующие конкретные конфигурации C-F.
Конфигурация С
Подвижный копирный ролик 25 может быть шарнирно установлен на подвижном теле 37, установленном с возможностью перемещения в определенном диапазоне по прямой, параллельной центру вала подвижного копирного ролика 25, при этом удерживающее средство 40 может быть образовано пружиной 41, которая поджимает подвижное тело 37 в направлении от ходовых винтов 21А, 21В, 21С…, так чтобы удерживать подвижный копирный ролик 25 в неактивном положении, а переключающее средство 43 может быть образовано кулачковой направляющей 44а для удержания подвижного копирного ролика 25, воздействуя на копирный ролик 42а кулачкового механизма, расположенный на подвижном теле 37, для перемещения подвижного копирного ролика 25 в активное положение.
Конфигурация D
Когда используется конфигурация С, на подвижном теле 37 шарнирно устанавливают пару копирных роликов 42а и 42b кулачкового механизма, расположенных по обе стороны от ходовых винтов 21А, 21В, 21С…. В качестве кулачковой направляющей можно использовать установленные в непосредственной близости друг к другу кулачковые направляющие 44а и 44b для воздействия, соответственно, на копирные ролики 42а и 42b кулачкового механизма.
Конфигурация Е
Когда используется конфигурация D, можно использовать кулачковую направляющую 45а для принудительного возврата копирного ролика 42а кулачкового механизма обратно в неактивное положение, при этом кулачковая направляющая 45а вступает в действие, когда копирный ролик 42а кулачкового механизма сходит с кулачковой направляющей 44а.
Конфигурация F
Кроме того, в конструкции по второму варианту настоящего изобретения на участке, не являющемся переходным участком В1, В2…, проходящим через переднюю и заднюю части зазора 33 между ходовыми винтами, в зацеплении с ходовыми винтами 21А, 21В, 21С… находится только один копирный ролик, имеющий фиксированное положение. Таким образом, конструкция может быть выполнена так, чтобы шаг Р1 или Р2 ходовых винтов 21А, 21В, 21С… на переходных участках В1, В2… не менялся. Вне переходных участков В1, В2… можно поместить границу между двумя (передним и задним) участками А1-А3, отличающимися шагом ходовых винтов 21А, 21В, 21С…, а шаг Р1 или Р2 ходовых винтов 21А, 21В, 21С… на переходных участках В1, В2… можно задать равным кратной части интервала D в осевом направлении ходовых винтов между неподвижным копирным роликом 26 и подвижным копирным роликом 25.
В конфигурации С подвижный копирный ролик движется по прямой, параллельной центральной оси вала подвижного копирного ролика и, следовательно, по сравнению с решением, согласно которому подвижный копирный ролик шарнирно установлен на поворотном рычаге, этот подвижный копирный ролик можно вытягивать из канавки между спиральными ребрами ходовых винтов и вставлять в эту канавку в ориентации под прямым углом к осевому направлению ходовых винтов и, следовательно, уменьшить биения приводимой в движение транспортной тележки за счет уменьшения люфта копирного ролика в осевом направлении ходового винта.
Когда используется конфигурация С, по сравнению с решением, согласно которому подвижный копирный ролик шарнирно установлен на поворотном рычаге, сопротивление трения линейного скольжения на участке направляющей подвижного копирного ролика (подвижного тела) увеличивается. Однако согласно конкретной конфигурации D подвижное тело (подвижный копирный ролик) может линейно и плавно скользить, что позволяет плавно и надежно переключать положения подвижного копирного ролика. Кроме того, конфигурация Е позволяет устранить неудобство, заключающееся в том, что из-за высокого сопротивления трения между подвижным копирным роликом в активном положении и спиральным ребром ходового винта одно только поджимающее усилие пружины не может вернуть подвижный копирный ролик (подвижное тело) назад в исходное неактивное положение, несмотря на то что кулачковая направляющая отделилась от копирного ролика кулачкового механизма. В результате, требуемая операция надежно выполняется.
В конфигурации F, в которой имеется множество переходных участков, проходящих через переднюю и заднюю части зазора между ходовыми винтами, нет необходимости сохранять одинаковый шаг винтов на всех переходных участках, и если шаг задан как кратная часть интервала между неподвижным копирным роликом и подвижным копирным роликом в осевом направлении ходовых винтов, шаг на переходных участках при необходимости можно менять. Следовательно, в комбинации с расположением границы между двумя (передним и задним) участками с разным шагом ходового винта вне переходных участков можно произвольно задавать множество участков, различающихся скоростью перемещения транспортной тележки в середине пути движения, включая соответствующие переходные участки.
Транспортирующее устройство с винтовым приводом по третьему варианту настоящего изобретения, направленному на достижение первой цели, имеет конструкцию, в которой (для справки, элементам описываемых ниже вариантов присвоены ссылочные позиции и буквы): приводимые во вращение ходовые винты установлены вдоль пути перемещения транспортной тележки; транспортная тележка снабжена копирным роликом, находящимся в зацеплении с ходовыми винтами; и транспортная тележка приводится в движение вращающимися ходовыми винтами, в которой множество ходовых винтов 51А, 51В, 51С…, расположенных на пути перемещения, расположены в две линии зигзагом так, что ходовые винты последовательно занимают разные линии, при этом транспортная тележка 52 снабжена двумя копирными роликами 55 и 56, каждый из которых может соответственно взаимодействовать с двумя линиями ходовых винтов 51А, 51С… и 51В…, расположенными в каждой линии концентрично и последовательно, при этом, что касается ходовых винтов 51А, 51С… и 51В…, расположенных в две линии, и копирных роликов 55 и 56, эти копирные ролики 55, 56 поочередно входят в зацепление с ходовыми винтами 51А, 51В, 51С… на соответствующих линиях на участке, на являющемся переходным участком В1, В2, В3 между предшествующим и последующим ходовыми винтами 51А и 51В и между предшествующим и последующим ходовыми винтами 51В и 51С, находящимися на разных линиях, а также размещены так, что на переходных участках В1, В2, В3 до того, как один копирный ролик 56 сойдет с предшествующих ходовых винтов 51А и 51В на одной линии, второй копирный ролик 55 входит в зацепление с последующими ходовыми винтами 51В и 51С, на другой линии.
Согласно конструкции по третьему варианту настоящего изобретения, нет необходимости устанавливать приводное средство транспортной тележки, специально предназначенное для перехода, такое как вспомогательный ходовой винт для перехода копирного ролика транспортной тележки между соответствующими ходовыми винтами, расположенными на пути перемещения транспортной тележки, и два копирных ролика можно расположить на транспортной тележке в фиксированных положениях, и подвижный копирный ролик, выполненный с возможностью изменения положения относительно ходового винта, а также средство для изменения положения подвижного копирного ролика в этом случае не нужны. Поэтому конструкция всего устройства значительно упрощается и расходы на изготовление устройства невысоки. Кроме того, за счет расположения ходовых винтов зигзагом так, чтобы ходовые винты располагались концентрично и последовательно на каждой из двух линий, и за счет установки на транспортной тележке двух копирных роликов транспортную тележку можно приводить в непрерывное движение даже на переходных участках между двумя соседними ходовыми винтами, находящимися на разных линиях. Кроме того, необходимо сконструировать транспортную тележку, которая на переходных участках движется с постоянной скоростью без изменения шага соответствующих ходовых винтов. Однако если определяется участок, не являющийся переходным, один копирный ролик просто входит в зацепление с ходовыми винтами. Поэтому когда граница между двумя (передним и задним) участками с разным шагом ходового винта находится на участке, не являющимся переходным, скорость перемещения транспортной тележки на середине пути движения также можно менять.
При реализации третьего варианта настоящего изобретения можно использовать следующие конкретные конфигурации G-J.
Конфигурация G
Первый переходный участок В1, на котором два последовательно расположенных ходовых винта 51А и 51В находятся на разных линиях и разнесены в осевом направлении ходовых винтов, и второй переходных участок В2, на котором концы двух ходовых винтов 1В и 1С расположены рядом друг с другом и находятся на разных линиях, соответственно перекрывают друг друга и расположены в чередующемся порядке, и два копирных ролика 55 и 56 могут быть расположены так, чтобы из положения были разнесены в осевом направлении ходовых винтов на расстояние (интервал D), превышающее интервал в осевом направлении ходового винта между двумя ходовыми винтами 51А и 5В, примыкающими друг к другу и находящимися на разных линиях на первом переходном участке В1, и более короткое, чем длина перекрытия концов двух ходовых винтов 51В и 51С на втором переходном участке В2.
Конфигурация Н
Когда используется конфигурация G, на первом и втором переходных участках В1 и В2 шаг ходовых винтов 51А, 51В, 51С… не меняется, и на участке, не являющемся первым и вторым переходными участками В1 и В2, можно поместить границу между двумя (передним и задним) участками ходовых винтов 51А, 51В, 51С… с разным шагом, при этом шаг ходовых винтов 51А, 51В, 51С… на первом и втором переходных участках можно задать как кратную часть интервала D в осевом направлении ходовых винтов между двумя копирными роликами 55 и 56.
Конфигурация I
В качестве переходного участка можно использовать переходный участок В3, на котором концы двух ходовых винтов 51А, 51В и 51В, 51С обращены друг к другу и находятся на разных линиях, перекрывая друг друга, а два копирных ролика 55, 56 можно установить в непосредственной близости симметрично относительно направления, перпендикулярного осевому направлению ходового винта так, чтобы они одновременно вступали во взаимодействие с двумя ходовыми винтами 51А, 51В или 51В, 51С, проходящими до и после переходного участка В3 и расположенными на разных линиях.
Конфигурация J
Когда для переходного участка В3 используется конфигурация I, шаг ходовых винтов 1А, 1В, 1С не меняется, а на участке, не являющемся переходным участком В3, можно поместить границу между двумя (передним и задним) участками ходового винта 1А, 1В, 1С… с разным шагом.
Третий вариант настоящего изобретения можно реализовать, используя конфигурацию G и конфигурацию I. В частности, согласно конфигурации G, третий вариант настоящего изобретения легко можно реализовать, ограничивая общую протяженность ходовых винтов. Согласно конфигурации I, два копирных ролика на транспортной тележке могут быть установлены в непосредственной близости в направлении, перпендикулярном направлению движения транспортной тележки, и, следовательно, третий вариант настоящего изобретения легко можно реализовать для небольшой транспортной тележки, имеющей небольшую длину.
Кроме того, согласно конфигурации Н или конфигурации J, если имеется множество переходных участков, нет необходимости использовать один и тот же шаг ходовых винтов на всех переходных участках, и шаг винта на переходных участках может меняться по мере необходимости. Следовательно, в комбинации с размещением границы между двумя (передним и задним) участками ходового винта с разным шагом на участке, не являющимся переходным, на середине пути перемещения можно произвольно задавать множество участков, на которых транспортная тележка движется с разной скоростью, включая соответствующие переходные участки. В частности, если согласно конфигурации J на переходных участках задаются шаги винтов, не возникает ограничений, связанных с взаимодействием ходовых винтов с копирным роликом.
Вторая цель настоящего изобретения заключается в создании транспортного устройства с винтовым приводом, способного решить известную проблему, заключающуюся в том, что из-за люфта между спиральным ребром ходового винта и копирным роликом транспортной тележки транспортная тележка (деталь), как описано выше, подвержена биениям, направленным вперед и назад. Транспортное устройство с винтовым приводом по четвертому варианту настоящего изобретения, направленному на достижение второй цели, имеет конструкцию, в которой (для справки, элементам описываемых ниже вариантов присвоены ссылочные позиции и буквы): приводимый во вращение ходовой винт 71 установлен вдоль пути перемещения транспортной тележки 72; транспортная тележка 72 снабжена копирным роликом 75, находящимся в зацеплении с ходовым винтом 71; и транспортная тележка 72 приводится в движение вращением ходового винта 71; при этом на транспортной тележке 72 между спиральными ребрами 71а и 71b в двух положениях, являющихся передним и задним положениями в осевом направлении ходового винта, шарнирно установлены передний и задний копирные ролики 75 и 76, один из которых является копирным роликом 75 с фиксированным положением, а другой - подвижным копирным роликом 76, установленным с возможностью перемещения в определенном диапазоне в осевом направлении ходового винта, поджимающее средство 90 для пожатия подвижного копирного ролика 76 в одной ориентации направления движения подвижного копирного ролика 76, и когда передний и задний копирные ролики 75, 76 прижимаются в направлении друг от друга к спиральным ребрам 71а и 71b ходового винта 71, расположенным с одной стороны от соответствующих копирных роликов 75 и 76, определяется положение транспортной тележки 72 относительно ходового винта 71.
Согласно конструкции по четвертому варианту настоящего изобретения, когда передний и задний копирные ролики на транспортной тележке прижимаются в направлении друг от друга к спиральным ребрам ходового винта, расположенным на одной стороне от соответствующих копирных роликов, определяется положение транспортной тележки относительно ходового винта. Такая конструкция устраняет необходимость в высокой точности изготовления ходового винта, чтобы свести к минимуму зазор (люфт) между копирным роликом на транспортной тележке и спиральными ребрами ходового винта, между которыми вставлен этот копирный ролик. Хотя стоимость изготовления ходового винта можно снизить, положение транспортной тележки относительно ходового винта можно надежно определить плотным контактом между неподвижным копирным роликом и спиральным ребром на ходовом винте и поэтому можно надежно предотвратить вызванные вибрацией и пр. биения транспортной тележки вперед и назад при ее перемещении. Следовательно, настоящее изобретение можно успешно применять для транспортировки деталей на линии нанесения покрытий, в которой такого типа транспортные устройства ранее применять не разрешалось.
Когда используется четвертый вариант настоящего изобретения, если длина пути перемещения транспортной тележки 72 невелика, то всю длину пути перемещения транспортной тележки можно перекрыть единственным ходовым винтом 71. Когда длина пути перемещения транспортной тележки 72 велика, возникает необходимость концентрично и последовательно установить множество ходовых винтов 71 и функционально соединить соответствующие ходовые винты 71 друг с другом. В этом случае между ходовыми винтами 71 требуется установить подшипники 82 на обоих концах ходового винта 71, и трансмиссионные средства 78 и 79 между ходовыми винтами 71, и, из-за этого, между ходовыми винтами 71 необходимо оставлять достаточно длинный зазор 71. Когда четвертый вариант настоящего изобретения используется в такой ситуации, можно применять следующие конкретные конфигурации K и L.
Конфигурация K
Эта конфигурация может содержать множество ходовых винтов 71, установленных концентрично и последовательно так, чтобы зазор 83 имел ширину, не превышающую интервал между передним и задним копирными роликами 75 и 76, при этом подвижный копирный ролик 76 снабжен удерживающим средством 91 для позиционирования подвижного копирного ролика 76 в положении, когда пара из переднего и заднего копирных роликов 75, 76 вставлена между спиральными ребрами 71а и 71b одного ходового винта 71 (ожидаемое рабочее положение) так, чтобы соответственно прижиматься к спиральным ребрам 71а и 71b с одной стороны, при этом в зазоре 83 между ходовыми винтами имеется переключающее средство 96 для переключения удерживающего средства 91 из непозиционированного состояния в позиционированное состояние до зазора 83 и возврата удерживающего средства 91 из позиционированного состояния в непозционированное состояние после зазора 83, и когда пара из переднего и заднего копирных роликов переходит через зазор 83 между ходовыми винтами 71, подвижный копирный ролик 76 позиционируется удерживающим средством 91.
Конфигурация L
Когда используется конфигурация K, она может иметь такую конструкцию, чтобы копирный ролик 67 был шарнирно установлен на подвижном теле 88, установленном с возможностью перемещения в определенном диапазоне в осевом направлении ходового винта, при этом поджимающее средство 90 образовано пружиной 92 для поджатия подвижного тела 88 в одном направлении, при этом удерживающее средство 91 образовано запираемым участком 95, расположенным на транспортной тележке 72, и запирающим элементом 94, шарнирно установленным на подвижном теле 88 так, чтобы входить в разъемное зацепление с запираемым участком 95, который поджат и удерживается в непозиционированном состоянии, отведенном от запираемого участка 95, позиционирующим средством 96, снабженным кулачковой направляющей 97, расположенной сбоку от пути перемещения транспортной тележки 72 так, чтобы воздействовать на копирный ролик 98 кулачкового механизма, расположенный на запирающем элементе 94, и когда пара из переднего и заднего копирных роликов 75, 76 переходит через зазор 83 между ходовыми винтами 71, кулачковая направляющая 97 удерживает запирающий элемент 94 с помощью копирного ролика 98 кулачкового механизма в позиционированном положении в зацеплении с запираемым участком 95.
Когда необходимо концентрично установить множество ходовых винтов, поскольку длина пути перемещения транспортной тележки велика, и когда пара из переднего и заднего копирных роликов проходят через зазор, например, когда неподвижный копирный ролик проходит через зазор, при обеспечении зазора, необходимого для установки подшипников ходового винта и трансмиссионного средства между ходовыми винтами, транспортная тележка движется относительно подвижного копирного ролика под воздействием прижимающего средства и, в результате, интервал между неподвижным копирным роликом и подвижным копирным роликом изменяется. В качестве альтернативы, когда подвижный копирный ролик проходит через зазор, он смещается в направлении поджатия усилием поджимающего средства и, в результате, интервал между неподвижным копирным роликом и подвижным копирным роликом изменяется. Однако, согласно конфигурации К, такой случай можно исключить и пара из переднего и заднего копирных роликов может плавно и надежно вставляться между спиральными ребрами ходового винта, следующего после зазора. То есть, когда используется конфигурация по четвертому варианту настоящего изобретения, переход между ходовыми винтами может выполняться плавно и надежно. Эта конфигурация К легко может быть реализована с использованием конфигурации L.
Третьей целью настоящего изобретения является создание транспортирующего устройства с винтовым приводом, снабженного структурой ходового винта, которая может использоваться при реализации транспортирующего устройства с винтовым приводом по первым четырем вариантам настоящего изобретения. Транспортирующее устройство с винтовым приводом по пятому варианту настоящего изобретения, направленное на достижение третьей цели, имеет конструкцию, в которой (для справки, элементам описываемых ниже вариантов присвоены ссылочные позиции и буквы): приводимый во вращение ходовой винт 101 установлен вдоль пути перемещения транспортной тележки 102; транспортная тележка 102 снабжена копирным роликом 105, находящимся в зацеплении в ходовым винтом 101; и транспортная тележка 102 приводится в движение вращением ходового винта 101; при этом ходовой винт 101 состоит из: центрального вала 112, оба конца которого установлены с возможностью вращения в подшипниках 123; и множества цилиндрических винтовых отдельных тел 113, надетых на центральный вал 112 так, чтобы располагаться последовательно в осевом направлении центрального вала 112; причем соответствующие цилиндрические винтовые отдельные тела 113 состоят из цилиндрического главного тела 117 и спирального ребра 118, выступающего наружу от цилиндрического главного тела 117, при этом каждое из цилиндрических винтовых отдельных тел 113 снаружи прикреплено к центральному валу 112 так, чтобы спиральное ребро 118 непрерывно проходило по всей длине центрального вала 112 в осевом направлении.
В конструкции по пятому варианту настоящего изобретения, даже если соответствующие цилиндрические винтовые отдельные тела не имеют вставляемых участков, которые вставляются в осевом направлении, прочность на изгиб всех отдельных винтовых тел, собранных с центральным валом в требуемом количестве, можно обеспечить центральным валом, проходящим по всей длине ходового винта. Другими словами, соответствующие цилиндрические винтовые отдельные тела можно крепить к центральному валу с поворотом так, чтобы спиральное ребро непрерывно проходило по всей длине ходового винта. Даже если на концах соответствующих цилиндрических винтовых отдельных тел выполнен вставляемый участок, который вставляется в осевом направлении, глубину, на которую вставляется этот участок, можно уменьшить до необходимого минимума и вес всего устройства можно уменьшить за счет уменьшения количества используемого материала. Кроме того, конструкцию можно упростить для снижения себестоимости.
При реализации пятого варианта настоящего изобретения применяются следующие конкретные конфигурации M-Q.
Конфигурация M
Соответствующие цилиндрические винтовые отдельные тела 113 выполнены с цилиндрической шейкой 117а, концентрично выступающей из одного конца, при этом выступающая цилиндрическая шейка 117а одного цилиндрического винтового отдельного тела 113 вставлена в конец (в кольцевое углубление) примыкающего цилиндрического винтового отдельного тела 113. Относительное вращение и относительное осевое перемещение обоих соединенных винтовых тел 113 блокировано соединительным элементом 122, вставленным в радиальном направлении в блокирующие гнезда обоих винтовых тел 113.
В конфигурации М соответствующие цилиндрические винтовые отдельные тела соединены друг с другом так, что каждое отдельное тело не имеет возможности вращаться или совершать осевые перемещения относительно других тел. Таким образом, в качестве способа крепления требуемого количества цилиндрических винтовых отдельных тел, надетых на центральный вал, к центральному валу можно соответствующими средствами крепить только цилиндрические винтовые отдельные тела (или тело), установленные на обоих концах или на одном конце центрального вала.
Конфигурация N
Соответствующие цилиндрические винтовые отдельные тела 113 выполнены с выступающей цилиндрической шейкой 117а, концентрично выступающей из одного конца, которая вставляется в осевом направлении в конец (кольцевое углубление 117b) другого цилиндрического винтового отдельного тела 113, при этом соединение может быть выполнено так, чтобы не допускать относительного вращения цилиндрических винтовых отдельных тел 113 проходящей в осевом направлении вала шпонкой 124, установленной между обоими винтовыми телами 113 в месте их соединения. В этом случае шпонка 124 может быть выполнена за одно целое при литье на одной из внешних кольцевых поверхностей на конце цилиндрической выступающей шейки 117а, а на внутренней поверхности того конца цилиндрического винтового отдельного тела 113, в который вставляется выступающая цилиндрическая шейка 117а, может быть выполнена шпоночная канавка 125, в которую вставляется шпонка 124. Кроме того, шпоночные канавки 125а, 125b могут быть выполнены на обеих поверхностях, т.е. на внешней кольцевой поверхности выступающей цилиндрической шейки 117а и на внутренней поверхности того конца цилиндрического винтового отдельного тела 113, в который вставляется выступающая цилиндрическая шейка 117а, а между этими шпоночными канавками 125а и 125b может быть вставлена шпонка 124, являющаяся отдельной деталью.
Конфигурация О
Соответствующие цилиндрические винтовые отдельные тела 113 выполнены с квадратной шейкой 126, концентрично выступающей из одного конца, и квадратным гнездом 127, выполненном на другом конце, и соседние в осевом направлении цилиндрические винтовые отдельные тела можно соединять так, чтобы не допустить их относительного вращения, поскольку выступающая квадратная шейка 126 одного цилиндрического винтового отдельного тела 113 вставлена в квадратное гнездо 127 другого цилиндрического винтового отдельного тела 113.
Конфигурация Р
В центральном валу 112 в осевом направлении выполнена непрерывная шпоночная канавка 128, а внутри по меньшей мере одного конца соответствующего цилиндрического винтового отдельного тела 113 выполнена шпоночная канавка 129, и соответствующие цилиндрические винтовые отдельные тела 113 можно надевать на центральный вал 112 так, что их вращение блокируется шпонкой 130, вставленной в шпоночную канавку 129 соответствующих цилиндрических винтовых отдельных тел 113, и в шпоночную канавку 128 на центральном валу 112.
Конфигурация Q
Когда используются конфигурации М-Р, множество цилиндрических винтовых отдельных тел 113, надетых на центральный вал 112, можно закрепить в осевом направлении гайками 116а и 116b, навинченными на концы центрального вала 112. Однако способ крепления цилиндрического винтового отдельного тела 113 к центральному валу 112 не ограничивается. Например, в конкретной М все цилиндрические винтовые отдельные тела 113, надетые на центральный вал 112 в осевом направлении, также соединены соединительным элементом 122. Таким образом, к центральному валу 112 соответствующими средствами могут крепиться только цилиндрические винтовые отдельные тела (или тело) 113, расположенные на обоих концах или на одном конце центрального вала 112. В конфигурациях N-Р цилиндрические винтовые отдельные тела 113 могут относительно свободно перемещаться в осевом направлении и, поэтому, к центральному валу 112 можно соответствующими средствами крепить только два цилиндрических винтовых отдельных тела 113, расположенные на концах центрального вала 112.
В конфигурациях N-P соседние цилиндрические винтовые отдельные тела соединены так, чтобы не допустить их относительного вращения. Поэтому, по сравнению с вариантом, в котором соответствующие цилиндрические винтовые отдельные тела нужно крепить к центральному валу индивидуально, путем определения фазы так, чтобы спиральные ребра соответствующих цилиндрических винтовых отдельных тел образовывали непрерывное ребро, проходящее в осевом направлении, операция сборки существенно упрощается. В качестве альтернативы, за счет шпоночного соединения и за счет соединения в квадрат можно надежно передавать большие вращающие усилия между соответствующими цилиндрическими винтовыми отдельными телами.
Кроме того, когда используются конфигурации М-Р и когда используется конфигурация Q к центральному валу можно прикрепить требуемое количество цилиндрических винтовых отдельных тел, соединенных в осевом направлении так, что их относительное перемещение по меньшей мере в окружном направлении заблокировано одной лишь операцией крепления гайки на конец центрального вала. В частности, когда собранные таким образом ходовые винты устанавливаются на пути перемещения транспортной тележки и функционально соединяются друг с другом цепной или зубчатой передачей, можно легко и просто совместить фазы спиральных ребер между соответствующими ходовыми винтами, просто вращая все цилиндрические винтовые отдельные тела, отпустив гайки.
Краткое описание чертежей
Фиг.1 представляет собой схематичный вид сверху первого варианта настоящего изобретения.
Фиг.2 представляет собой вид сбоку релевантных деталей.
Фиг.3 представляет собой вид сзади, иллюстрирующий стартовый конец пути перемещения транспортной тележки по первому варианту.
Фиг.4 представляет собой продольный вид спереди средней части пути перемещения транспортной тележки по первому варианту настоящего изобретения.
Фиг.5 представляет собой увеличенный вид сверху релевантных деталей, иллюстрирующий структуру функционального соединения ходового винта и вспомогательного ходового винта по первому варианту настоящего изобретения.
Фиг.6 представляет собой схематичный вид сверху релевантных деталей, иллюстрирующий второй вариант настоящего изобретения.
Фиг.7 представляет собой схематичный вид сбоку релевантных деталей.
Фиг.8 представляет собой вид сбоку, иллюстрирующий ходовой винт и пару из переднего и заднего копирных роликов на транспортной тележке по второму варианту настоящего изобретения.
Фиг.9 представляет собой вид спереди релевантных деталей по фиг.8.
Фиг.10 представляет собой частичный вид сбоку, иллюстрирующий состояние перехода через зазор между ходовыми винтами по второму варианту.
Фиг.11 представляет собой вид спереди релевантных деталей по фиг.10.
Фиг.12 представляет собой частичный вид сбоку релевантных деталей, иллюстрирующий модифицированный пример второго варианта настоящего изобретения.
Фиг.13 представляет собой схематичный вид сверху релевантных деталей, иллюстрирующий третий вариант настоящего изобретения.
Фиг.14 представляет собой схематичный вид сбоку релевантных деталей.
Фиг.15 представляет собой вид спереди, иллюстрирующий первый переходный участок по третьему варианту настоящего изобретения.
Фиг.16 представляет собой вид спереди, иллюстрирующий второй переходный участок по третьему варианту настоящего изобретения.
Фиг.17 представляет собой вид сверху, иллюстрирующий первый переходный участок по третьему варианту настоящего изобретения.
Фиг.18 представляет собой вид сверху, иллюстрирующий второй переходный участок по третьему варианту настоящего изобретения.
Фиг.19 представляет собой вид сверху с местным разрезом, иллюстрирующий модифицированный пример третьего варианта настоящего изобретения.
Фиг.20 представляет собой схематичный вид сверху релевантных деталей, иллюстрирующий четвертый вариант настоящего изобретения.
Фиг.21 представляет собой схематичный вид сбоку релевантных деталей.
Фиг.22А представляет собой вид сбоку релевантных деталей, когда транспортная тележка приводится в движение на одном ходовом винте по четвертому варианту настоящего изобретения.
Фиг.22В представляет собой вид сверху релевантных деталей.
Фиг.23 представляет собой увеличенный вид слева по фиг.22А.
Фиг.24 представляет собой вид сверху узла подвижного копирного ролика по четвертому варианту настоящего изобретения.
Фиг.25 представляет собой вид сбоку с местным разрезом релевантных деталей, иллюстрирующий состояние непосредственно перед переходом через зазор между ходовыми винтами по четвертому варианту настоящего изобретения.
Фиг.26 представляет собой вид сбоку с местным разрезом релевантных деталей, иллюстрирующий состояние в середине перехода через зазор между ходовыми винтами по четвертому варианту настоящего изобретения.
Фиг.27 представляет собой вид сбоку с местным разрезом релевантных деталей, иллюстрирующий состояние непосредственно после перехода через зазор между ходовыми винтами по четвертому варианту настоящего изобретения.
Фиг.28 представляет собой схематичный вид сверху релевантных деталей, иллюстрирующий пятый вариант настоящего изобретения.
Фиг.29 представляет собой схематичный вид релевантных деталей.
Фиг.30 представляет собой вид сверху, иллюстрирующий ходовые винты по пятому варианту.
Фиг.31 представляет собой вид сбоку с местным разрезом, иллюстрирующий центральный вал ходового винта и крепежную гайку, и вид сбоку с местным разрезом цилиндрического винтового отдельного тела и торцевой крышки.
Фиг.32 представляет собой частичный вид сбоку релевантных деталей ходового винта.
Фиг.33 представляет собой частичный боковой вид релевантных деталей, иллюстрирующий первый модифицированный пример пятого варианта настоящего изобретения.
Фиг.34 представляет собой вид спереди релевантных деталей.
Фиг.35 представляет собой частичный вид сбоку релевантных деталей, иллюстрирующий второй модифицированный пример пятого варианта настоящего изобретения.
Фиг.36 представляет собой частичный вид сбоку релевантных деталей, иллюстрирующий третий модифицированный пример пятого варианта настоящего изобретения.
Фиг.37 представляет собой вид сбоку релевантных деталей, иллюстрирующий четвертый модифицированный пример пятого варианта настоящего изобретения.
Позиции на чертежах
1А, 1В, 1С - ходовой винт
2 - транспортная тележка
3а, 3b - направляющий рельс
4а, 4b - колесо
5 - зазор между ходовыми винтами
6А, 6В - вспомогательный ходовой винт
7, 8 - подшипник
9-11 - трансмиссионное средство
12 - редукторный электродвигатель
13а, 13b - спиральное ребро ходового винта
14 - копирный ролик
15а, 15b - спиральное ребро вспомогательного ходового винта
16 - вспомогательный копирный ролик
21А, 21В, 21С - ходовой винт
21а, 21b - спиральное ребро
22 - транспортная тележка
25 - подвижный копирный ролик
26 - неподвижный копирный ролик
27 - промежуточный вал
28-30 - трансмиссионное средство
31 - редукторный электродвигатель
32 - подшипник
33 - зазор между ходовыми винтами
35 - цилиндрическая направляющая скольжения
36 - подъемный вал
37 - подвижный кронштейн
38 - вертикальный штифт для остановки вращения
40 - удерживающее средство
41 - сжатая цилиндрическая пружина
42а, 42b - копирный ролик кулачкового механизма
43 - переключающее средство
44а, 44b - кулачковая направляющая
45а, 45b - кулачковая направляющая принудительного возврата
51а, 51b, 51с - ходовой винт
51а, 51b - спиральное ребро
52 - транспортная тележка
55, 56 - копирный ролик
57, 58, 68 - запирающее средство
60, 63 - промежуточный вал
61, 64, 66 - трансмиссионное средство
67 - редукторный электродвигатель
62 - подшипник
71 - ходовой винт
71а, 71b - спиральное ребро
72 - транспортная тележка
75 - неподвижный копирный ролик
76 - подвижный копирный ролик
78-80 - трансмиссионное средство
81 - редукторный электродвигатель
82 - подшипник
83 - зазор между ходовыми винтами
87 - направляющий вал
88 - подвижное тело
90 - поджимающее средство
91 - удерживающее средство
92 - сжатая цилиндрическая пружина
94 - запирающий элемент
95 - запираемый участок
96 - переключающее средство
97 - кулачковая направляющая
98 - копирный ролик кулачкового механизма
101 - ходовой винт
101а - спиральное ребро
105 - копирный ролик
106 - вспомогательный ходовой винт
106а - спиральное ребро
107 - вспомогательный копирный ролик
108 - 110 - трансмиссионное средство
111 - редукторный электродвигатель
112 - центральный вал
114 - шпиндель
114а, 114b - спиральный вал
115 - выступающая шейка малого радиуса
116а, 116b - крепежная гайка
117 - цилиндрическое основное тело
117а - выступающая цилиндрическая шейка
117b - кольцевое углубление
118 - спиральное ребро
119, 120 - сквозное отверстие
121 - торцовая крышка
122 - соединительный элемент (например, пружинный штифт)
123 - подшипник
124, 130 - шпонка
125, 125а, 125b, 128, 129 - шпоночная канавка
126 - выступающая шейка квадратного сечения
127 - гнездо квадратного сечения
131 - участок сквозного отверстия
А1, А3 - участок движения с малой скоростью
А2 - участок движения с высокой скоростью
В1, В2 - переходный участок
Р1, Р2 - шаг ходового винта (спирального ребра)
D - интервал в осевом направлении ходового винта между копирным роликом и вспомогательным копирным роликом
Предпочтительные варианты осуществления настоящего изобретения
Первый вариант
На фиг. 1 и 2 показаны части транспортирующего устройства.
Транспортная тележка, приводимая в движение и перемещаемая ходовыми винтами 1А, 1В, 1С…, содержит: пару из переднего и заднего не имеющих фланцев колес 4а, катящихся по одному из правого и левого направляющих рельсов 3а и 3b, пару передних и задних содержащих фланцы колес 4b, катящихся по другому направляющему рельсу 3b и охватывающих направляющий рельс 3b с правой и с левой сторон. Параллельно направляющим рельсам 3а и 3b в промежутке между этими правым и левым направляющими рельсами 3а и 3b концентрично и последовательно установлено необходимое количество ходовых винтов 1А, 1В, 1С… с зазорами 5 между ними. Сбоку от конца соответствующих ходовых винтов 1А, 1В, 1С…, обращенного в направлении движения и примыкающего к зазору 5 между ходовыми винтами, параллельно ходовым винтам 1А, 1В, 1С… и в непосредственной близости от них установлены вспомогательные ходовые винты 6А, 6В…, которые короче соответствующих ходовых винтов 1А, 1В, 1С…, но существенно дине, чем длина зазоров 5, которые имеют одинаковую длину и расположены в непосредственной близости и параллельно. Концы смежных ходовых винтов 1А, 1В, 1С… и вспомогательных ходовых винтов 6А, 6В… на стороне, примыкающей к зазорам 5 между ходовыми винтами, совмещены по положению в осевом направлении ходового винта.
Как показано на фиг.4 и 5, соответствующие ходовые винты 1А, 1В, 1С… и соответствующие вспомогательные ходовые винты 6А, 6В… установлены в подшипниках 7 и 8, на валах 1а, 1b и 6а, 6b, выступающих из обоих концов этих ходовых винтов 1А, 1В, 1С…. Выступающие валы 1а и 1b соответствующих ходовых винтов 1А, 1В, 1С…, расположенные рядом друг с другом в зазорах 5 между ходовыми винтами, и выступающие валы 6а, входящие в зазоры 5 между соответствующими вспомогательными ходовыми винтами 6А, 6В…, функционально соединены друг с другом трансмиссионными средствами 9 и 10, образованными зубчатыми колесами 9а и 9b и зубчатыми колесами 10а и 10b, прикрепленными к выступающим валам 1а, 1b и 6а, и цепями 9с и 10с, надетыми на зубчатые колеса 9а и 9b и на зубчатые колеса 10а и 10b. Как показано на фиг.1-3, ходовой винт 1А, расположенный на одном конце пути перемещения транспортной тележки 2, функционально соединен с редукторным электродвигателем 12 через трансмиссионное средство 11, в котором, как и в трансмиссионных средствах 9 и 10, используется зубчатые колеса 11а и 11b и цепь 11с. Кроме того, когда ходовой винт 1А приводится во вращение редукторным электродвигателем 12, все ходовые винты 1А, 1В, 1С… и вспомогательные ходовые винты 6А, 6В… могут функционально вращаться с постоянной скоростью и в одном и том же направлении. Кроме того, соответствующие зазоры 5 между ходовыми винтами используются как промежутки для наладки соответствующих ходовых винтов 1А, 1В, 1С… или подшипников 7 и 8, поддерживающих один конец вспомогательных ходовых винтов 6А, 6В…, или трансмиссионных средств 9 и 10.
Ходовые винт 1А, 1В, 1С… или вспомогательные ходовые винты 6А, 6В… могут приводиться во вращение любым способом. Например, конструкция может быть такой, что редукторным электродвигателем приводится во вращение один из ходовых винтов 1В, 1С…, в соответствующих промежуточных положениях пути движения транспортной тележки 2, или вспомогательных ходовых винтов 5А, 5В…, соединенных с соответствующими ходовыми винтами 1А, 1В, 1С…. Далее, в качестве трансмиссионного средства 9-11 была описана цепная передача, однако можно также использовать и зубчатую передачу.
На транспортной тележке 2 установлен копирный ролик 14, вставленный между спиральными ребрами 13а и 13b соответствующих ходовых винтов 1А, 1В, 1С…, и вспомогательный копирный ролик 16, вставленный между спиральными ребрами 15а, 15b соответствующих вспомогательных ходовых винтов 6А, 6В…. Копирный ролик 14 и вспомогательный копирный ролик 16 установлены, как показано на фиг.5. То есть, они установлены в таком порядке, чтобы когда копирный ролик 14 вставлен между спиральными ребрами 13а и 13b на одном из концов ходового винта 1А, 1В, 1С…, расположенного рядом с вспомогательным ходовым винтом 6А, 6В…, вспомогательный копирный ролик 16 был вставлен между спиральными ребрами 15а и 15b на конце вспомогательного ходового винта 6А, 6В…, удаленном от копирного ролика 14 (т.е., на конце, не примыкающем к зазору 5 между ходовыми винтами). Копирный ролик 14 и вспомогательный копирный ролик 16 разнесены друг от друга в осевом направлении ходового винта на интервал D, который короче вспомогательных ходовых винтов 6А, 6В…, но длиннее зазора 5 между ходовыми винтами.
Ходовые винты 1А, 1В, 1С… выполнены со спиральными ребрами 13а и 13b двухреберной системы, которая охватывает копирный ролик 14 с обеих сторон в осевом направлении ходового винта, а вспомогательные ходовые винты 6А, 6В… выполнены со спиральными ребрами 15а, 15b двухреберной системы, которые охватывают вспомогательный копирный ролик 16 с обеих сторон в осевом направлении ходового винта. Шаг винта непостоянен. В показанном варианте, как показано на фиг.1 и 2, имеется низкоскоростной участок А1, проходящий от свободного конца до промежуточного положения ходового винта 1А, высокоскоростной участок А2, проходящий от низкоскоростного участка А1 движения до промежуточного положения на следующем ходовом винте 1В, и низкоскоростной участок А3, следующий после высокоскоростного участка А2. Высокоскоростной участок А2 и следующий за ним низкоскоростной участок А3 включают по одному переходному участку В1 и В2 соответственно. Переходные участки В1 и В2 соответствуют участкам, проходящим от вспомогательного копирного ролика 16, находящегося в положении немного перед вспомогательными ходовыми винтами 6А, 6В… для копирного ролика 14, которые образуют пару, когда вспомогательный копирный ролик 16 приходит на следующий ходовой винт 1В, 1С… за зазором 5 между ходовыми винтами. Каждый из этих переходных участков В1 и В2 содержит один из вспомогательных ходовых винтов 6А, 6В…, один зазор между ходовыми винтами, расположенными рядом с вспомогательными ходовыми винтами 6А, 6В…, и концевые участки ходовых винтов 1А, 1В, 1С…, расположенные до и после зазора 5.
Шаг Р1 спиральных ребер 13а и 13b ходовых винтов 1А, 1В, 1С… или спиральных ребер 15а и 15b вспомогательных ходовых винтов 6А, 6В на участке, включенном в низкоскоростные участки А1 и А3, меньше, чем шаг Р2 спиральных ребер 13а и 13b или 15а и 15b на участке, включенном в высокоскоростной участок А2. Оба шага Р1 и Р2 являются кратной частью интервала D в осевом направлении ходового винта между копирным роликом 14 и вспомогательным копирным роликом 16. В показанном примере шаг Р1 составляет 1/4 интервала D, а шаг Р2 - 1/2 интервала D.
Согласно вышеописанной конфигурации, когда редукторный электродвигатель 12 приводит во вращение все ходовые винты 1А, 1В, 1С… и вспомогательные ходовые винты 6А, 6В… с постоянной частотой и в одном направлении, например в направлении, в котором транспортная тележка перемещается в направлении, показанном стрелками на фиг.1 и 2, транспортная тележка 2, находившаяся в ожидании на стартовом конце пути перемещения на ходовом винте 1А с копирным роликом 14, вставленным между спиральными ребрами 13а, 13b ходового винта 1А на низкоскоростном участке, начинает движение вперед с низкой скоростью, эквивалентной шагу Р1 ходового винта 1А на низкоскоростном участке А1. Когда движение транспортной тележки 2 позволит копирному ролику 14 перейти из положения между спиральными ребрами 13а и 13b низкоскоростного участка А1 в положение между спиральными ребрами 13а и 13b следующего, высокоскоростного участка А2, скорость движения транспортной тележки 2 меняется на высокую, эквивалентную шагу Р2 ходового винта 1А на высокоскоростном участке А2. В это время вспомогательный копирный ролик 16 находится в свободном состоянии и, поэтому, переключение скорости транспортной тележки 2 происходит беспрепятственно. В результате транспортная тележка 2, движущаяся с высокой скоростью по высокоскоростному участку А2, приходит на переходный участок В1, включенный в высокоскоростной участок А2, и движется по переходному участку В1, сохраняя высокую скорость, эквивалентную шагу Р2. Незадолго до того, как передний копирный ролик 14 достигнет конца ходового винта 1А, задний вспомогательный копирный ролик 16 входит в канавку между спиральными ребрами 15а и 15b вспомогательного ходового винта 6А на переходном участке В1.
За счет этого, даже если копирный ролик 14 будет вытолкнут из ходового винта 1А вместе с движением транспортной тележки 2, транспортная тележка 2 продолжает двигаться с высокой скоростью без перерыва, поскольку вспомогательный копирный ролик принимает толкающее усилие от вспомогательного ходового винта 6А. В это время копирный ролик 14 движется в зазоре 5 между ходовыми винтами 1А и 1В. Кроме того, когда вспомогательный копирный ролик 16 вытягивается из вспомогательного ходового винта 6А вместе с движением транспортной тележки 2, передний копирный ролик 14, двигавшийся в зазоре 5, уже вошел между спиральными ребрами 13а и 13b следующего ходового винта 1В и, в результате, транспортная тележка 2, продолжающая получать толкающее усилие от ходового винта 1В через копирный ролик 14, продолжает движение с высокой скоростью.
Когда копирный ролик 14 транспортной тележки 2 переходит из положения между спиральными ребрами 13а и 13b высокоскоростного участка А2 в положение между спиральными ребрами 13а, 13b следующего низкоскоростного участка А3 ходового винта 1В, скорость движения транспортной тележки 2 переключается с высокой, эквивалентной шагу Р2 ходового винта 1В на высокоскоростном участке А2, на низкую, эквивалентную шагу Р1 ходового винта 1В на низкоскоростном участке А3. В это время вспомогательный копирный ролик 16 находится в свободном состоянии и, поэтому, переключение скорости транспортной тележки 2 происходит беспрепятственно. Затем, копирный ролик 14 транспортной тележки 2 приходит на переходный участок В2, включенный в низкоскоростной участок А3, и движется через переходный участок В2, сохраняя низкую скорость, эквивалентную шагу Р1. Однако, незадолго до того, как передний копирный ролик 14 достигнет конца ходового винта 1В, задний вспомогательный копирный ролик 16 входит в канавку между спиральными ребрами 15а и 15b вспомогательного ходового винта 6В на переходном участке В2.
Благодаря этому, даже если копирный ролик 14 вытягивается из ходового винта 1В вместе с движением транспортной тележки 2, транспортная тележка 2 продолжает непрерывно двигаться с низкой скоростью благодаря тому, что вспомогательный копирный ролик 16 получает толкающее усилие от вспомогательного ходового винта 6В. В это время копирный ролик 14 движется в зазоре 5 между ходовыми винтами 1В и 1С. Кроме того, когда вспомогательный копирный ролик 16 вытягивается из вспомогательного ходового винта 6В, вместе с движением транспортной тележки 2, передний копирный ролик 14, двигавшийся в зазоре 5, уже вошел в канавку между спиральными ребрами 13а и 13b следующего ходового винта 1С. В результате транспортная тележка 2, которая продолжает получать толкающее усилие от ходового винта 1С через копирный ролик 14, продолжает двигаться с низкой скоростью.
Таким образом, транспортная тележка 2 последовательно проходит низкоскоростной участок А1, высокоскоростной участок А2 и низкоскоростной участок А3 и движется непрерывно, автоматически меняя скорость с низкой на высокую и с высокой на низкую, эквивалентную шагу Р1 и Р2 винтов на соответствующих участках. В это время для того чтобы на соответствующих переходных участках В1, В2… задний вспомогательный копирный ролик 16 транспортной тележки 2, приводимой в движение ходовыми винами 1А, 1В, 1С… через передний копирный ролик 14, мог беспрепятственно входить в канавку между спиральными ребрами 15а и 15b вспомогательных ходовых винтов 6А, 6В…, ходовые винты 1А, 1В, 1С… и соответствующие вспомогательные ходовые винты 6А, 6В…, расположенные рядом с ними, не только имеют одинаковый шаг спиральных ребер 13а, 13b и спиральных ребер 15а, 15b, но и точно согласованы по фазе. Кроме того, для того чтобы копирный ролик 14, который вытягивается из соответствующего предшествующего ходового винта 1А, 1С, 1В…, мог беспрепятственно войти в канавку между спиральными ребрами 13а и 13b соответствующего последующего ходового винта 1В, 1С…, эти спиральные ребра 13а, 13b на концах (переднем и заднем) двух ходовых винтов 1А, 1В, 1С…, которые концентрично обращены друг к другу, не только имеют одинаковый шаг, но и точно согласованы по фазе.
Более того, когда путь перемещения транспортной тележки 2 является прямоугольным бесконечным циклическим путем с установленным поворотными столами для подачи транспортной тележки вбок и ее поворота между путем подачи и путем возврата и снабжен соответствующими ходовыми винтами 1А, 1В, 1С… и вспомогательными ходовыми винтами 6А, 6В…, между стартовыми и финишными путями на обоих направлениях, направление движения транспортной тележки 2 можно задать постоянным, вращая соответствующие ходовые винты 1А, 1В, 1С… и вспомогательные ходовые винты 6А, 6В… в одном и том же направлении. Когда транспортная тележка 2 совершает возвратно-поступательные перемещения по одному и тому же прямому пути, направление вращения ходовых винтов 1А, 1В, 1С… и вспомогательных ходовых винтов 6А, 6В… можно реверсировать. В варианте по фиг.1 и 2, когда ходовые винты 1А, 1В, 1С… и вспомогательные ходовые винты 6А, 6В… вращаются в противоположную сторону для перемещения транспортной тележки назад, вспомогательный копирный ролик 16, движущийся впереди копирного ролика 14, входит в канавку между спиральными ребрами 15а и 15b вспомогательных ходовых винтов 6В м 6А, расположенных рядом с последующими ходовыми винтами 1В и 1А так, чтобы принять на себя толкающее усилие до того, как копирный ролик 14 (теперь находящийся сзади) будет вытянут из ходовых винтов 1С и 1В и до того как вспомогательный копирный ролик 16 будет вытянут из вспомогательных ходовых винтов 6В и 6А, копирный ролик 14 входит в канавку между спиральными ребрами 13а и 13b расположенных по ходу движения ходовых винтов 1В и 1А так, чтобы принять толкающее усилие. Таким образом, так же, как и в случае движения вперед, описанном выше, транспортная тележка 2 может непрерывно перемещаться с заранее определенной скоростью, заданной для соответствующих участков, без влияния зазоров 5 между ходовыми винтами.
Устройство привода транспортной тележки, в котором применены ходовые винты по вышеописанному первому варианту настоящего изобретения, может использоваться не только как средство привода и перемещения транспортной тележки в конвейере, в котором направляющие рельсы уложены на поверхность пола, но и как средство привода и перемещения транспортной тележки в подвесном конвейере, в котором направляющие рельсы подвешены на соответствующей высоте над поверхностью пола. В качестве альтернативы, положение ходовых винтов относительно транспортной тележки не ограничивается нижней стороной транспортной тележки. Оно может быть выбрано произвольно, например, сбоку или сверху от транспортной тележки в соответствии с опорной структурой транспортной тележки, структурой груза и т.п. Следовательно ходовые винты и вспомогательные ходовые винты могут устанавливаться рядом друг с другом не только (справа и слева) в горизонтальной плоскости, но и (сверху и снизу) в вертикальной плоскости. В качестве альтернативы, копирный ролик и вспомогательный копирный ролик могут устанавливаться шарнирно так, что центры их валов ориентированы не в вертикальной плоскости (вверх и вниз), а в горизонтальной плоскости (вправо и влево).
Второй вариант
На фиг.6 и 7 представлены виды, иллюстрирующие часть транспортирующего устройства, в котором используется ходовой винт для привода транспортной тележки. Транспортная тележка 22 приводится в движение и перемещается ходовыми винтами 21А, 21В, 21С… и снабжена передним и задним не имеющими фланцев колесами 24а, катящимися по одному направляющему рельсу 23а из пары, состоящей из правого и левого направляющих рельсов 23а и 23b, передним и задним имеющими фланцы колесами 24b, катящимися по другому рельсу 23b и охватывающими направляющий рельс 23b с обеих сторон. Параллельно направляющим рельсам 23а, 23b и между ними расположено необходимое количество ходовых винтов 21А, 21В, 21С…, которые установлены концентрично и последовательно. Снизу на транспортной тележке 22 установлены передний и задний копирные ролики 25 и 26, выполненные с возможностью вращения вокруг вертикального опорного вала, свободно вставленного между спиральными ребрами ходовых винтов 21А, 21В, 21С….
Соседние концы соответствующих ходовых винтов 21А, 21В, 21С… функционально соединены друг с другом промежуточными валами 27, установленными сбоку от этих концов, и трансмиссионными средствами 28 и 29, в каждом из которых используется цепная (или зубчатая) передача, так чтобы вращаться в одном направлении с одинаковой частотой. Кроме того, имеется редукторный электродвигатель 31, предназначенный для приведения во вращение в произвольном направлении (положительном или отрицательном) ходового винта 21А, расположенного на одном конце пути перемещения транспортной тележки 22 через трансмиссионное средство 30, в котором используется цепная (или зубчатая) передача. Конфигурация, кроме того, может быть такой, что редукторный электродвигатель приводит во вращение ходовые винты 21В, 21С… в соответствующем промежуточном положении пути перемещения транспортной тележки 22 или промежуточный вал 27, соединенный с ходовыми винтами 21В, 21С…. Позицией 32 обозначены подшипники, которые соответственно поддерживают оба конца ходовых винтов 21А, 21В, 21С…, и подшипники 32 и трансмиссионные средства 28 и 29 размещены в зазорах 33.
Копирный ролик 25, расположенный на передней стороне по направлению движения, показанному стрелкой, является подвижным копирным роликом 25, выполненным с возможностью свободно перемещаться между активным положением, вставленным в канавку между спиральными ребрами 21а и 21b ходовых винтов 21А, 21В, 21С…, и неактивным положением, выведенным из канавки между спиральными ребрами 21а и 21b. Задний копирный ролик 26 является неподвижным копирным роликом, закрепленным в фиксированном положении на транспортной тележке 22, т.е. в положении (в показанном варианте - по высоте) в канавке между спиральными ребрами 21а и 21b ходовых винтов 21А, 21В, 21С…. Интервал D между подвижным копирным роликом 25 и неподвижным копирным роликом 26 превышает длину каждого зазора 33 между ходовыми винтами. Поэтому когда транспортная тележка 22 проходит через зазор 33 между ходовыми винтами, не возникает ситуации, когда и передний, и задний копирные ролики 25 и 26 выведены из ходовых винтов 21А, 21В, 21С… в результате нахождения в зазоре 33.
Более подробное описание следует ниже. Как показано на фиг.8 и 9, в положении крепления подвижного копирного ролика 25 снизу на транспортной тележке 22 горизонтально установлена опорная плита 34. К опорной плите 34 прикреплена цилиндрическая направляющая 35 скольжения, ориентированная вертикально (в направлении вверх и вниз) непосредственно над центральной осью ходовых винтов 21А, 21В, 21С…. На нижнем конце стержня 36, выполненного с возможностью подъема и вставленного в направляющую 35 скольжения, закреплен подвижный П-образный кронштейн 37, ориентированный так, чтобы охватывать ходовые винты 21А, 21В, 21С… сверху. На нижнем конце поднимающегося стержня 36, выступающего вниз относительно П-образного подвижного кронштейна 37, шарнирно установлен подвижный копирный ролик 25 с возможностью вращения вокруг вертикальной оси подъемного стержня 36. П-образный подвижный кронштейн 37 может поворачиваться вокруг подъемного стержня 36 вместе с подъемным стержнем 36 (или вокруг вертикальной оси подъемного стержня 36). Для остановки вращения П-образного подвижного кронштейна 37 в сквозное отверстие в опорной плите 34 пропущен вертикальный штифт 38, нижний конец которого прикреплен к П-образному кронштейну так, чтобы обеспечивать возможность его вертикального перемещения. Кроме того, между упором 39 для пружины, прикрепленным к верхнему концу подъемного стержня 36 и опорной плитой 34, установлен подвижный копирный ролик 25, надетый на подъемный стержень 36, вставленный в цилиндрическую направляющую 35, при этом ролик 25 удерживается пружиной 41, которая является удерживающим средством 41 и прижимает его в неактивное положение (показанное на фиг. 8 и 9), выведенное из канавки между спиральными ребрами 21а и 21b ходовых винтов 21А, 21В, 21С…. Кроме того, снаружи от пластин на левой и правой стороне П-образного подвижного кронштейна 37 шарнирно и концентрично установлены копирные ролики 42а и 42b кулачкового механизма, выполненные с возможностью вращения вокруг правой и левой горизонтальных осей.
Как показано на фиг.6, 7, 10 и 11, для каждого зазора 33 между ходовыми винтами предусмотрено переключающее средство 43. Каждое переключающее средство 43 содержит: правую и левую кулачковые направляющие 44а и 44b для выталкивания вниз правого и левого копирных роликов 42а и 42b кулачкового механизма (на П-образном подвижном кронштейне 37), на постоянной длине пути, и правую и левую кулачковые направляющие 45а и 45b для принудительного выталкивания вверх правого и левого копирных роликов 42а и 42b кулачкового механизма (на П-образном подвижном кронштейне 37), которые сходят с кулачковых направляющих 44а и 44b. Положение и длина кулачковых направляющих 44а и 44b и кулачковых направляющих 45а и 45b принудительного восстановления переключающего средства 43 задаются такими, чтобы выполнять описываемую ниже операцию.
Ходовые винты 21А, 2В, 21С… выполнены со спиральными ребрами 21а и 21b двухреберной системы, которые охватывают с обеих сторон в осевом направлении ходового винта копирные ролики 25 и 26, однако шаг винта не постоянен. В варианте, показанном на фиг.6 и 7, имеется низкоскоростной участок А1, проходящий от свободного конца ходового винта 21А до промежуточного положения на этом ходовом винте, высокоскоростной участок А2, проходящий от низкоскоростного участка А1 для промежуточного положения на следующем ходовом винте 21В, и низкоскоростной участок А3, следующий после высокоскоростного участка А2. Высокоскоростной участок А2 и следующий низкоскоростной участок А3 содержат, соответственно, по одному переходному участку В1 и В2. Переходные участки В1 и В2 соответствуют участкам, проходящим от положения неподвижного копирного ролика 26, когда подвижный копирный ролик 25 находится в зазоре 33 между ходовыми винтами до подвижного копирного ролика 25, когда неподвижный копирный ролик 26 приходит на ходовые винты 21В, 21С…, расположенные после зазора 33. Каждый переходный участок В1 и В2 содержит концевые участки одного зазора 33 между ходовыми винтами и ходовые винты 21А, 21В, 21С, примыкающие к зазору 33.
Шаг Р1 спиральных ребер 21а, 21b участка, включенного в низкоскоростные участки А1 и А3 ходовых винтов 21А, 21В 21С…, меньше, чем шаг З2 спиральных ребер 21а, 21b участка, включенного в высокоскоростной участок А2. Оба шага Р1 и Р2 являются кратной частью интервала D в осевом направлении ходового винта между передним и задним копирными роликами 25, 26. В показанном примере шаг P1 равен 1/4 интервала D, а шаг Р2 - 1/2 интервала D.
В описанной выше конфигурации, когда редукторный электродвигатель 32 приводит во вращение все ходовые винты 21А, 21В, 21С… с постоянной частотой в одном направлении, например в направлении перемещения транспортной тележки 22, показанном стрелками на фиг.6 и 7, транспортная тележка 22, находившаяся в ожидании на стартовом конце пути движения на ходовом винте 21А с задним неподвижным копирным роликом, вставленным в канавку между спиральными ребрами 21а, 21b ходового винта 21А, на низкоскоростном участке А1, начинает движение с низкой скоростью, эквивалентной шагу Р1 ходового винта 21А на низкоскоростном участке А1.
Когда перемещение транспортной тележки 22 позволит неподвижному копирному ролику 26 выйти из канавки между спиральными ребрами 21а, 21b на низкоскоростном участке А1 и войти в канавку между спиральными ребрами 21а, 21b на следующем высокоскоростном участке А2, скорость движения транспортной тележки 22 переключается на высокую, эквивалентную шагу Р2 ходового винта 21А на высокоскоростном участке А2. В это время передний подвижный ролик 25 удерживается в неактивном положении, над ходовыми винтами 21А, 21В, 21С… удерживающим средством 40 (сжатой цилиндрической пружиной 41) и, поэтому, переключение скорости транспортной тележки 22 выполняется беспрепятственно.
В результате транспортная тележка 22, движущаяся с высокой скоростью по высокоскоростному участку А2, приходит на переходный участок В1, включенный в высокоскоростной участок А1, сохраняя высокую скорость, эквивалентную шагу Р2. Однако, когда передний подвижный копирный ролик 25 полностью войдет в зазор 33, входящий в переходный участок В1, как показано пунктирной линией на фиг.10, копирные ролики 42а и 42b кулачкового механизма, установленные на подвижном копирном ролике 25, полностью заходят на нижнюю сторону кулачковых направляющих 44а и 44b переключающего средства 43, установленного в зазоре 33, и за счет движения транспортной тележки 22 кулачковые направляющие 44а и 44b через копирные ролики 42а и 42b кулачкового механизма выталкивают вниз П-образный кронштейн 37, преодолевая поджимающее действие сжатой цилиндрической пружины 41. В результате подвижный копирный ролик 25 опускается из неактивного положения в активное положение и движется в зазоре 33. Затем, как показано сплошными линиями на фиг.10, подвижный копирный ролик 25 в активном положении при движении транспортной тележки 22 входит в канавку между спиральными ребрами 21а и 21b ходового винта 21В, находящегося за зазором 33, и вскоре после этого задний неподвижный ролик 26 вытягивается из ходового винта 21А, находящегося перед зазором 33, и входит в зазор 33. Однако передний подвижный копирный ролик 25 получает толкающее усилие от ходового винта 21В и, поэтому, транспортная тележка 22 продолжает движение с высокой скоростью и может перейти через переходный участок В1.
Транспортная тележка 22 продолжает двигаться вперед под действием ходового винта 21В и передний подвижный копирный ролик 25 удерживается в активном положении кулачковыми направляющими 44а и 44b. В результате задний неподвижный копирный ролик 26, находившийся в зазоре 33 перед ходовым винтом 21В, входит в канавку между спиральными ребрами 21а и 21b следующего ходового винта 21В. При этом неподвижный копирный ролик 26 начинает получать толкающее усилие от ходового винта 21В. Вскоре после этого копирные ролики 42а и 42b кулачкового механизма доходят до конца кулачковых направляющих 44а и 44b. В это время между спиральными ребрами 21а и 21b ходового винта 21В и находящимся в активном положении подвижным копирным роликом 25 возникает большая сила трения и, поэтому, одного только усилия сжатой цилиндрической пружины 41 может оказаться недостаточно для надежного подъема копирных роликов 42а и 42b кулачкового механизма для возврата копирного ролика 25 в неактивное положение. Однако, как показано штриховой линией на фиг.10, копирные ролики 42а, 42b кулачкового механизма, достигшие конца кулачковых направляющих 44а и 44b, принудительно выталкиваются вверх восстанавливающими кулачковыми направляющими 45а и 45b. Таким образом, подвижный копирный ролик 25 надежно отделяется от спиральных ребер 21а и 21b ходового винта 21В и, затем, под действием сжатой цилиндрической пружины 41 подвижный копирный ролик 25 поднимается в первоначальное неактивное положение и удерживается в этом состоянии. После того как подвижный копирный ролик 25 отделится от ходового винта 21В, этот ходовой винт 21В продолжает перемещать транспортную тележку 22 с высокой скоростью через задний неподвижный копирный ролик 26.
Когда неподвижный копирный ролик 26 транспортной тележки 22 переходит из канавки между спиральными ребрами 21а и 21b на высокоскоростном участке А2 ходового винта 21В в канавку между спиральными ребрами 21а и 21b на низкоскоростном участке А3, скорость перемещения транспортной тележки 22 переключается с высокой, эквивалентной шагу Р2 ходового винта 21В на высокоскоростном участке А2, на низкую, эквивалентную шагу Р1 ходового винта 21В на низкоскоростном участке А3. В это время, также, подвижный копирный ролик 25 не работает, поскольку находится в неактивном положении. Поэтому переключение скорости транспортной тележки 22 происходит беспрепятственно. Затем, неподвижный копирный ролик 26 транспортной тележки 22 должен прийти на переходный участок В2, включенный в низкоскоростной участок А3, сохраняя низкую скорость, эквивалентную шагу Р1. Как и на переходном участке В1, перед тем как неподвижный копирный ролик 26 сойдет с ходового винта 21В, передний подвижный копирный ролик 25, переведенный из неактивного положения в активное положение переключающим механизмом 43 в зазоре 33, вводится в канавку между спиральными ребрами 21а и 21b ходового винта 21С, расположенного после зазора 33, и начинает получать толкающее усилие. Затем, неподвижный копирный ролик 26 переходит через зазор 33 и входит в канавку между спиральными ребрами 21а и 21b ходового винта 21С, чтобы получать толкающее усилие. Затем подвижный копирный ролик 25 возвращается переключающим средством 43 из активного в исходное неактивное положение и после этого ходовой винт 21С приводит транспортную тележку 22 в движение с низкой скоростью через один только неподвижный копирный ролик 26.
Таким образом, транспортная тележка 22 последовательно проходит через низкоскоростной участок А1, высокоскоростной участок А2 и низкоскоростной участок А3, двигаясь непрерывно и автоматически, переключаясь на высокую или на низкую скорость, эквивалентную шагу Р1 или P2 на соответствующем участке. В это время для того чтобы на соответствующих переходных участках В1, В2… передний подвижный копирный ролик 25, переведенный переключающим средством 43, расположенным в соответствующих воздушных зазорах 33, из неактивного положения в активное, мог беспрепятственно войти в канавку между спиральными ребрами 21а, 21b ходовых винтов 21В, 21С…, расположенных за соответствующими зазорами 33, и для того чтобы неподвижный копирный ролик 26 мог беспрепятственно войти в канавку между спиральными ребрами 21а, 21b ходовых винтов 21В, 21С…, расположенных за соответствующими зазорами 33, спиральные ребра 21а, 21b на обращенных друг к другу концах (переднем и заднем) двух ходовых винтов 12А, 21В, 21С… на соответствующих переходных участках В1, В2… не только имеют одинаковый шаг, но и точно согласованы по фазе.
Кроме того, когда путь перемещения транспортной тележки 22 является прямоугольным бесконечным циклическим путем с установленными поворотными столами для подачи транспортной тележки вбок и ее поворота между путем подачи и путем возврата, и снабжен соответствующими ходовыми винтами 21А, 21В, 21С… и вспомогательными ходовыми винтами 26А, 26В… между стартовыми и финишными путями на обоих направлениях, направление движения транспортной тележки 22 можно задать постоянным, вращая соответствующие ходовые винты 21А, 21В, 21С… в одном и том же направлении. Когда транспортная тележка 22 совершает возвратно-поступательные перемещения по одному и тому же прямому пути, направление вращения ходовых винтов 21А, 21В, 21С… можно реверсировать. В варианте по фиг.6 и 7 когда ходовые винты 21А, 21В, 21С… вращаются в обратном направлении для перемещения транспортной тележки 22 назад, если транспортная тележка 22 переходит через соответствующий переходный участок В1 и В2 перед тем, как неподвижный (т.е., в данном случае - передний) копирный ролик 26 сойдет с ходовых винтов 21С и 21В, подвижный (в данном случае - задний) копирный ролик 25 переводится переключающим средством 43 из неактивного положения в активное, чтобы принять толкающее усилие, и неподвижный (в данном случае - передний) копирный ролик 26 проходит через зазор 33, чтобы войти в канавку между спиральными ребрами 21а, 21b следующего по направлению движения ходового винта 21В или 21А. Затем подвижный (в данном случае - задний) копирный ролик с помощью переключающего средства 43 можно вернуть из активного в первоначальное неактивное положение. Таким образом, как и при движении вперед, описанном выше, транспортная тележка 22 может перемещаться непрерывно с заранее определенной скоростью, заданной для каждого участка, независимо от наличия зазоров 33 между ходовыми винтами. Другими словами, как показано на фиг.12, в этой конструкции подвижный и неподвижный копирные ролики могут иметь обратное расположение на транспортной тележке 22, т.е. передним копирным роликом является неподвижный копирный ролик 26, а задним копирным роликом является подвижный копирный ролик 25.
Кроме того, в этой конструкции подвижный копирный ролик 26, переведенный переключающим средством 43 в зазоре 33 из неактивного положения в активное, входит в канавку между спиральными ребрами 21а, 21b ходовых винтов 21А, 21В, 21С… после зазора 33. Однако возможна и следующая конструкция: подвижный копирный ролик 26 переводится переключающим средством 43 из неактивного положения в активное до того, как неподвижный копирный ролик 25 сойдет с ходовых винтов 21А, 21В, 21С… и войдет в зазор, если подвижный копирный ролик 26 находится в положении над канавкой между спиральными ребрами 21а, 21b ходовых винтов 21А, 21В, 21С… после зазора 33 так, чтобы подвижный копирный ролик 26 непосредственно вставлялся между спиральными ребрами 21а, 21b ходовых винтов 21А, 21В, 21С… после зазора 33.
Кроме того, устройство привода транспортной тележки, использующее ходовой винт по вышеописанному второму варианту настоящего изобретения, может использоваться не только как средство привода и перемещения транспортной тележки в конвейере с направляющими рельсами, уложенными на поверхность пола, но и как средство привода и перемещения транспортной тележки в подвесном конвейере, в котором направляющие рельсы подвешены на соответствующей высоте над поверхностью пола. Кроме того, положение ходовых винтов относительно транспортных тележек такого типа не ограничивается нижней частью транспортной тележки и может выбираться произвольно, например, сбоку или сверху от транспортной тележки в соответствии с опорной структурой транспортной тележки, структурой груза и т.п. Кроме того, неподвижный копирный ролик и подвижный копирный ролик могут быть установлены шарнирно так, чтобы их центральные оси были ориентированы не вертикально, а горизонтально.
Третий вариант
Как показано на фиг.13 и 14, транспортная тележка 22, приводимая в движение и перемещаемая ходовыми винтами 51А, 51В, 51С…, снабжена передним и задним не имеющими фланцев колесами 54а, катящимися по одному направляющему рельсу 53а из пары, состоящей из левого и правого направляющих рельсов 53а и 53b, передним и задним имеющими фланцы колесами 54b, катящимися по второму направляющему рельсу 53b, и охватывающими направляющий рельс 53b справа и слева. Соответствующие ходовые винты 51А, 51В, 51С… установлены параллельно пути перемещения (направляющим рельсам 53а и 53b) транспортной тележки 52 с поочередным изменением (направо и налево) их положения относительно центральной линии между направляющими рельсами 53а и 53b так, что четные и нечетные из этих ходовых винтов 51А, 51В, 51С… установлены концентрично и последовательно. То есть, хотя на чертежах не показаны ходовые винты 51D, 51E, 51F, следующие после ходового винта 51С, ходовые винты 51А, 51С и 51Е (нечетные) - с одной стороны, и ходовые винты 51В, 51D, 51F (четные) - с другой стороны, соответственно установлены концентрично и последовательно. С другой стороны, снизу на транспортной тележке 52 расположены: копирный ролик 55, выполненный с возможностью вращения вокруг вертикального опорного вала в положении, вставленном в канавку между спиральными ребрами соответствующих ходовых винтов 51А, 51С… линии ходовых винтов, проходящей с одной стороны; и копирный ролик 56, выполненный с возможностью вращения вокруг вертикального опорного вала в положении, вставленном в канавку соответствующих ходовых винтов 51В… второй линии ходовых винтов на противоположной стороне.
Между двумя соседними ходовыми винтами, расположенными на разных линиях, т.е. между ходовыми винтами 51А и 51В, между ходовыми винтами 51В и 51С, между ходовыми винтами 51С м 51D (не показан) и после этих ходовых винтов между ходовыми винтами 51D и 51E… поочередно расположены два типа переходных участков В1 и В2, имеющих разную конфигурацию. На первом переходном участке В1 на одной стороне, как показано на фиг.15 и 17, концы двух ходовых винтов, например ходовых винтов 51А и 51В, расположены с зазором в осевом направлении ходовых винтов, и концы обоих ходовых винтов 51А и 51В функционально соединены соединительным средством 57. На втором переходном участке В2, как показано на фиг.16 и 18, концы двух ходовых винтов, например ходовых винтов 51В и 51С, перекрывают друг друга (справа и слева), располагаясь сбоку и в непосредственной близости друг от друга, и эти концы ходовых винтов 51В и 51С функционально соединены друг с другом соединительным средством 58.
Соединительное средство 57 и первый переходный участок В1 содержат: промежуточный вал 60, установленный в подшипниках 59 параллельно ходовым винтам 51А и 51В в промежуточном положении (на центральной линии) в непосредственной близости к двум ходовым винтам, например ходовым винтам 51А, 51В, при этом промежуточный вал 60 имеет меньшую длину, чем длина зазора между двумя концами обоих ходовых винтов 51А и 51В; и два трансмиссионных средства 61А и 61В, каждое из которых содержит зубчатые колеса 61а и 71b и цепь 61с для функционального соединения друг с другом концов промежуточного вала 60 и концов обоих ходовых винтов 51А и 51В, расположенных по бокам от промежуточного вала 60 в непосредственной близости к нему. Соединительное средство 58 второго переходного участка В2 содержит: промежуточный вал 63, установленный в подшипниках 62 параллельно ходовым винтам 51В и 51С в промежуточном положении (на центральной линии) в непосредственной близости к ходовым винтам 51В и 51С, при этом промежуточный вал 63 имеет по существу такую же длину, что и длина перекрытия концов обоих ходовых винтов 51В и 51С; два трансмиссионных средства 64А и 64В, каждое из которых содержит зубчатые колеса 61а и 64b и цепь 64с для функционального соединения друг с другом обоих концов промежуточного вала 63 и концов ходовых винтов 51В и 51С, расположенных по бокам от промежуточного вала 63. В трансмиссионных средствах 61А, 64А, 64В может применяться не цепная, а зубчатая передача. Кроме того, позицией 65 показан подшипник на обоих концах соответствующих ходовых винтов 51А, 51В, 51С….
Как показано на фиг.13 и 14, ходовой винт 51А, расположенный на одном конце пути перемещения транспортной тележки 52, функционально соединен с редукторным электродвигателем 67 через трансмиссионное средство 67, в котором применяется цепь (или шестерни). Редукторный электродвигатель альтернативно может быть соединен с одним из ходовых винтов 51В, 51С… в соответствующем промежуточном положении на пути перемещения транспортной тележки 52 или с одним из промежуточных валов 60 и 63, расположенных на переходных участках В1 и В2.
Два копирных ролика 55 и 56 на транспортной тележке 52 разнесены на заданное расстояние в осевом направлении ходового винта, как показано на фиг.17 и 18. Интервал D между копирными роликами 55 и 56 в осевом направлении ходового винта задан большим, чем расстояние в осевом направлении между концами двух соседних и находящихся на разных линиях ходовых винтов на первом переходном участке В1, например между ходовыми винтами 51А и 51В, но короче, чем длина перекрытия в осевом направлении ходового винта концов соседних, но находящихся на разных линиях ходовых винтов на втором переходном участке В2, например ходовых винтов 51В и 51С.
Ходовые винты 51А, 51В, 51С… выполнены со спиральными ребрами 51а и 51b двухреберной системы, в которой копирные ролики 55 и 56 охвачены с обеих сторон в осевом направлении ходового винта, но шаг винтов непостоянен. В описываемом варианте, как показано на фиг.13 и 14, имеется низкоскоростной участок А1, проходящий от свободного конца до промежуточного положения на ходовом винте 51А, высокоскоростной участок А2, проходящий от низкоскоростного участка А1 до промежуточного положения на следующем ходовом винте 51В, и низкоскоростной участок А3, следующий за высокоскоростным участком А2. Высокоскоростной участок А2 содержит первый переходный участок В1, а низкоскоростной участок А3 содержит второй переходный участок В2.
Шаг Р1 спиральных ребер 51а и 51b участка, включенного в низкоскоростные участки А1 и А3 ходовых винтов 51А, 51В, 51С…, меньше шага Р2 спиральных ребер 51а и 51b участка, включенного в высокоскоростной участок А2. Оба шага являются кратной частью интервала D в осевом направлении ходового винта между передним и задним копирными роликами 55 и 56. В приведенном примере шаг Р1 равен 1/4 интервала D, а шаг Р2 равен 1/2 интервала D.
В вышеописанной конструкции, когда редукторный электродвигатель 67 включается для вращения всех ходовых винтов 51Ф, 51В, 51С… с постоянной частотой и в одном направлении, например в направлении, при котором транспортная тележка 52 транспортируется вперед, как показано стрелками на фиг.13 и 14, через соединительные средства 57 и 58, установленные в соответствующих переходных участках В1 и В2, транспортная тележка 52, находившаяся в ожидании на стартовом конце пути перемещения на ходовом винте 51А в состоянии, когда задний копирный ролик 56 вставлен между спиральными ребрами 51а м 51b ходового винта 41А на низкоскоростном участке А1, начинает двигаться вперед с низкой скоростью, эквивалентной шагу Р1 ходового винта 51А на низкоскоростном участке А1. Когда движение транспортной тележки 52 позволит заднему копирному ролику 56 перейти из канавки между спиральными ребрами 51а и 51b ходового винта 51А на низкоскоростном участке А1 в канавку между спиральными ребрами 51а и 51b ходового винта 51А на следующем высокоскоростном участке А2, скорость движения транспортной тележки 52 меняется на высокую, эквивалентную шагу Р2 ходового винта 51А на высокоскоростном участке А2. В это время передний копирный ролик 55 находится в свободном состоянии, т.е. не вставлен в какой-либо ходовой винт и, поэтому, изменение скорости транспортной тележки 52 выполняется беспрепятственно.
В результате транспортная тележка 52, движущаяся с высокой скоростью на высокоскоростном участке А2 входит на первый переходный участок В1, включенный в высокоскоростной участок А2, сохраняя высокую скорость, эквивалентную шагу Р2. Однако, незадолго до того, как задний копирный ролик 56 сойдет с ходового винта 51А на этом переходном участке, как показано на фиг.17, передний копирный ролик 55 входит в канавку между спиральными ребрами 51а и 51b следующего по ходу движения ходового винта 51В. Поэтому транспортная тележка 52 автоматически переходит из состояния, в котором толкающее усилие ходового винта 51А воздействует на задний копирный ролик 56, в состояние, в котором толкающее усилие следующего ходового винта 51В действует на передний копирный ролик 55. Поэтому транспортная тележка 52 может без перерыва продолжать движение с высокой скоростью и пройти через первый переходный участок В1.
Когда транспортная тележка 52, движущаяся с высокой скоростью по высокоскоростному участку А2, получая толкающее усилие от ходового винта 51В через передний копирный ролик 55, достигает положения, граничащего со следующим низкоскоростным участком А3, передний копирный ролик 55 переходит из канавки между спиральными ребрами 51а и 51b высокоскоростного участка А2 ходового винта 51В в канавку между спиральными ребрами 51а и 51b следующего низкоскоростного участка А3, и скорость движения транспортной тележки 52 меняется на низкую скорость, эквивалентную шагу Р1 ходового винта 51В на низкоскоростном участке А3. В это время задний копирный ролик 56 находится в свободном состоянии, не вставленным в какой-либо ходовой винт и, поэтому, изменение скорости транспортной тележки 52 происходит беспрепятственно.
Затем передний копирный ролик 55 транспортной тележки 52 приходит на второй переходный участок В2, включенный в низкоскоростной участок А3, и движется через этот переходный участок В2, поддерживая низкую скорость, эквивалентную шагу Р1. Однако, как и на первом переходном участке В1, перед тем, как передний копирный ролик 55 сойдет с ходового винта 51В, задний копирный ролик 56 должен войти в канавку между спиральными ребрами 51а и 51b следующего ходового винта 51С так, чтобы принять толкающее усилие. В этом состоянии передний копирный ролик 5 сходит с ходового винта 51В в свободное состояние, и транспортная тележка 52 продолжает двигаться с низкой скоростью, эквивалентной шагу Р1 ходового винта 51С на низкоскоростном участке А3, получая толкающее усилие от ходового винта 51С через задний копирный ролик 56.
Таким образом, транспортная тележка последовательно и непрерывно движется через низкоскоростной участок А1, высокоскоростной участок А2 и низкоскоростной участок А3, автоматически меняя скорость на высокую или низкую, в соответствии с шагом Р1 и Р2 винта на соответствующих участках. Для того чтобы на соответствующих первом и втором переходных участках В1 и В2 копирный ролик 55 или 56, находившийся в свободном состоянии, мог беспрепятственно войти в канавку между спиральными ребрами 51а и 51b следующего ходового винта 51В, 51С…, спиральные ребра 51а, 51b на концах двух ходовых винтов 51А, 51В и 61В и 51С…, обращенные друг к другу и находящиеся на разных линиях на первом переходном участке В1 или на втором переходном участке В2, не только имеют одинаковый шаг, но и точно согласованы по фазе.
Кроме того, когда путь перемещения транспортной тележки 52 является прямоугольным бесконечным циклическим путем с установленными поворотными столами для подачи транспортной тележки вбок и ее поворота между путем подачи и путем возврата и снабжен соответствующими ходовыми винтами 51А, 51В, 51С… в указанном порядке, и между конечной и начальной точками этого пути, направление движения транспортной тележки 52 можно задать постоянным, вращая соответствующие ходовые винты 51А, 51В, 51С… в одном и том же направлении. Когда транспортная тележка 52 совершает возвратно-поступательные перемещения по одному и тому же прямому пути, направление вращения ходовых винтов 51А, 51В, 51С… можно реверсировать. В варианте по фиг.13 и 14, когда ходовые винты 51А, 51В, 51С… вращаются в противоположную сторону для перемещения транспортной тележки назад, когда транспортная тележка 52 проходит через соответствующие первый и второй переходные участки В1 и В2, перед тем, как копирный ролик 56 (теперь являющийся передним) сойдет с ходовых винтов 51С, 51В, копирный ролик 55 (теперь являющийся задним) может войти в канавку между спиральными ребрами 51а, 51b расположенного впереди по ходу движения ходового винта 51В или 51А. Таким образом, как и при описанном выше движении вперед, транспортная тележка 52 может непрерывно двигаться с заранее определенной скоростью, заданной для соответствующих участков, независимо от наличия соответствующих первого и второго переходных участков В1 и В2.
В этом варианте для формирования пути перемещения транспортной тележки 52 скомбинированы два типа переходных участков В1 и В2. Однако для конфигурирования пути перемещения транспортной тележки 52 можно использовать только один тип переходного участка В3, показанный на фиг.19. На переходном участке В3, показанном на фиг.19, концы предшествующих ходовых винтов 51А, 51В и концы последующих ходовых винтов 51В и 51С расположены рядом друг с другом так, чтобы перекрывать друг друга сбоку (справа и слева) на определенной длине, при этом концы обоих ходовых винтов функционально соединены соединительным средством 68 (с коротким промежуточным валом 63), которое аналогично соединительному средству 58 второго переходного участка В2. В этом варианте два копирных ролика 55 и 56 на транспортной тележке не разнесены друг от друга в осевом направлении ходового винта, а расположены рядом в симметричном положении (в терминах направлений направо и налево) относительно центральной линии (центральной оси промежуточного вала 68).
Кроме того, на переходном участке В3 такой конфигурации, непосредственно перед тем, как копирный ролик 56 или 55, который зацеплен с предыдущим ходовым винтом 61А или 51В для приведения в движение транспортной тележки 52, сойдет с соответствующего ходового винта 51А или 51В, другой копирный ролик 55 или 56, который находился в свободном состоянии, входит в зацепление со следующим ходовым винтом 51В или 51С для приведения в движение транспортной тележки 52. Немедленно после этого копирный ролик 56 или 55 сходит с предыдущего ходового винта 51А или 51В в свободное состояние. Поэтому транспортная тележка 52 может непрерывно перемещаться с заданной скоростью, принимая толкающее усилие от соответствующих ходовых винтов 51А, 51В, 651С… через копирный ролик 55 или 56, и проходить через соответствующие переходные участки В3 без каких-либо проблем.
Кроме того, устройство привода транспортной тележки по третьему варианту настоящего изобретения, в котором применяется ходовой винт, может использоваться не только как средство для привода и перемещения транспортной тележки по направляющим рельсам, уложенным на поверхности пола, но и как средство для привода и перемещения транспортной тележки подвесного конвейера, которая движется по рельсам, подвешенным на соответствующей высоте над поверхностью пола. Более того, положение ходового винта относительно транспортных тележек такого типа не ограничено нижней стороной транспортной тележки и может произвольно задаваться, например, сбоку или сверху относительно транспортной тележки в соответствии с опорной структурой транспортной тележки, структурой груза и пр. Следовательно, ходовые винты могут быть расположены зигзагом рядом друг с другом в направлении движения транспортно тележки не только в горизонтальной плоскости (справа и слева), но и в вертикальной плоскости (сверху и снизу). Кроме того, два копирных ролика могут быть шарнирно установлены так, чтобы их центральная ось проходила не вертикально, а горизонтально.
Четвертый вариант
На фиг.20 и 21 показаны части транспортной системы, сконфигурированной с использованием ходовых винтов 71 для привода транспортной тележки. Транспортная тележка 72, приводимая в движение и перемещаемая ходовыми винтами 71, содержит: переднее и заднее не имеющие фланцев колеса 74а, катящиеся по одному направляющему рельсу 73а из пары направляющих рельсов 73а, 73b, расположенных слева и справа, и передние и задние имеющие фланцы колеса 74b, катящиеся по другому направляющему рельсу 73b и охватывающие этот направляющий рельс 73b слева и справа.
Необходимое количество ходовых винтов 71 расположено концентрично и последовательно параллельно направляющим рельсам 73а и 73b между правыми и левыми рельсами 73а и 73b. Снизу на транспортной тележке 72 установлены передний и задний копирные ролики 75 и 76, выполненные с возможностью вращения вокруг вертикального опорного вала, вставленные в канавку между спиральными ребрами ходовых винтов 71. Ходовые винты 71 выполнены со спиральными ребрами 71а и 71b, сконфигурированные в двухреберную систему, и охватывающие копирные ролики 75 и 76 с двух сторон в осевом направлении ходового винта.
Концы концентрично расположенных ходовых винтов, обращенные друг к другу, функционально соединены промежуточным валом 77 так, чтобы вращаться в одном направлении с одинаковой постоянной частотой, при этом промежуточный вал 77 установлен сбоку от этих концов, и трансмиссионными средствами 78 и 79, в которых используется цепная (или зубчатая) передача, соответственно, а редукторный электродвигатель 81 установлен на одном конце пути перемещения транспортной тележки 72, для вращения ходовых винтов 71 в произвольном направлении, и соединен с ходовым винтом трансмиссионным средством 80, в котором используется цепная (или зубчатая) передача. Конструкция может быть такой, что редукторный электродвигатель 81 может быть установлен в соответствующем промежуточном положении на пути перемещения транспортной тележки 72 и приводить во вращение ходой винт 71 или промежуточный вал 77. Позициями 82 обозначены подшипники, в которых установлены оба конца ходового винта 71, а между ходовыми винтами 71 имеется зазор 83, в котором расположены и закреплены подшипники 82 и трансмиссионные средства 78 и 79.
Из пары копирных роликов 75 и 76 передний в показанном стрелкой направлении движения копирный ролик 75 является неподвижным роликом, прикрепленным к транспортной тележке 72 в фиксированном положении, а задний копирный ролик 76 выполнен подвижным, имеющим возможность свободного перемещения в определенном диапазоне в осевом направлении ходового винта 71. Интервал между обоими копирными роликами 75 и 76, когда подвижный копирный ролик 76 максимально приближен к неподвижному копирному ролику 75, больше, чем интервал между ходовыми винтами 71, т.е. больше длины зазора 83. Поэтому когда транспортная тележка 72 проходит через зазор 83 между ходовыми винтами 71, не возникает ситуации, когда оба копирных ролика 75 и 76 сходят с ходовых винтов 71 на обеих сторонах в результате попадания в зазор 83.
Далее, как показано на фиг.22-24, снизу на транспортной тележке 72 установлен узел 84 подвижного копирного ролика. Узел 84 подвижного копирного ролика содержит: переднюю и заднюю опорные плиты 86а и 86b, прикрепленные к крепежной плите 85; направляющий вал 87, проходящий параллельно ходовому винту 71 между опорными пластинами 86а и 86b; подвижное тело 88, установленное с возможностью скольжения на направляющем валу 87 в его осевом направлении и расположенное рядом с крепежной плитой 85 для предотвращения вращения подвижного тела вокруг направляющего вала 87; подвижный копирный ролик 76, установленный шарнирно с возможностью вращения вокруг вертикального вала 89, выполненного в нижней части подвижного тела 88; и поджимающее средство 90 для поджатия подвижного копирного ролика 76 в направлении от неподвижного копирного ролика 75. Кроме того, имеется удерживающее средство 91. Поджимающее средство 90 образовано сжатой цилиндрической пружиной 92, надетой на направляющий вал 87 между подвижным телом 88 и опорной плитой 86а для поджатия подвижного тела 88 в направлении от неподвижного копирного ролика 75.
Удерживающее средство 91 содержит: запирающий элемент 94, один конец которого шарнирно установлен с возможностью поворота в вертикальной плоскости на одной боковой поверхности подвижного тела 88 на горизонтальном опорном валу 93, который ориентирован в направлении, перпендикулярном ходовым винтам 71; запираемый участок 95, находящийся в разъемном зацеплении с крюком 94а, выступающим вбок от одной боковой стороны опорной плиты 86а, и выступающий вверх от дистального конца запирающего элемента 94. Запирающий элемент 94 снабжен стопором 94b, выступающим вверх со стороны шарнира. Когда запирающий элемент 94, который повернут вниз под действием силы тяжести, находится в непозиционированном положении, т.е. когда его крюк 94а вытянут вниз из запираемого участка 95, стопор 94b входит в контакт с нижней поверхностью крепежной плиты 85 и, затем, запирающий элемент удерживается в непозиционированном положении.
Как показано на фиг.20, 21 и 25-27, сбоку от зазора 83 между ходовыми винтами 71 установлено переключающее средство 96. Переключающее средство 96 содержит кулачковую направляющую 97, уложенную параллельно ходовым винтам 71 на пути перемещения транспортной тележки 72. Боковая сторона дальнего конца запирающего элемента 94 снабжена шарнирно установленным копирным роликом 98 кулачкового механизма, который поднимается по кулачковой направляющей 97 и катится по ней. Переключающее средство 96 и удерживающее средство 91, выполненные на подвижном копирном ролике 76, выполнены так, чтобы выполнять описываемое ниже действие.
Запирающий элемент 94 удерживающего средства 91 под действием силы тяжести удерживается в непозиционированном состоянии, то есть повернутым до упора вниз, а крюк 94а запирающего элемента 94 вытянут вниз из запираемого участка 95. То есть под действием толкающего усилия сжатой цилиндрической пружины 92 поджимающего средства 90 подвижный копирный ролик 76 может сдвигаться от неподвижного копирного ролика 75. В это время толкающее усилие сжатой цилиндрической пружины 92, воздействующее на копирный ролик 76, превышает сопротивление движению на направляющих рельсах 73а и 73b транспортной тележки 72, на которой установлена деталь. Следовательно, как показано на фиг.22, транспортная тележка 72 прижимается вперед реактивной силой, возникающей, когда подвижный копирный ролик 76, отжимаемый назад, контактирует с задним спиральным ребром 71b ходового винта 71 и прижимается к нему, а неподвижный копирный ролик 75 должен прижаться к переднему спиральному ребру 71а ходового винта. За счет прижима неподвижного копирного ролика 75 к переднему спиральному ребру 71а ходового винта 71 определяется положение транспортной тележки 72 и транспортная тележка 72 находится в состоянии, когда не возникает люфта (биения) в обоих осевых направлениях ходовых винтов 71. Положение подвижного копирного ролика 76 в это время является ожидаемым активным положением, и запирающий элемент 94 удерживающего средства 91 движется вверх, преодолевая силу тяжести, дальний конец крюка 94а находится в зацеплении с небольшим зазором непосредственно перед запирающим участком 95. Когда редукторный электродвигатель 81 работает для приведения во вращение в одном направлении и с постоянной частотой всех ходовых винтов 71, функционально соединенных друг с другом через трансмиссионные средства 78 и 79, вращающиеся ходовые винты 71 могут приводить в движение и перемещать вперед транспортную тележку через подвижный копирный ролик 76, прижатый к заднему спиральному ребру 71b.
Когда транспортная тележка 72 движется вперед в результате вращения ходовых винтов 71, для того чтобы передний неподвижный копирный ролик 75 мог подойти непосредственно к зазору 83 между ходовыми винтами 71, т.е. к концу предшествующего зазору 83 ходового винта 71, как показано на фиг.25, при движении транспортной тележки 72 копирный ролик 98 кулачкового механизма удерживающего средства 91 (запирающего элемента 94), выполненный на заднем подвижном копирном ролике 76, поднимается по кулачковой направляющей 97 переключающего средства 96, установленного в зазоре 83, и запирающий элемент 94, преодолевая силу тяжести, выталкивается вверх из своего непозиционированного положения. В результате запирающий элемент 94 переходит в позиционированное положение, в котором крюк 94а находится в зацеплении с запираемым участком 95. В это время имеется небольшой зазор между крюком 94а и запираемым участком 95 и, поэтому, запирающий элемент 94 может без помех надежно переводиться в позиционированное положение с запираемым участком 95.
Когда передний неподвижный копирный ролик 75 при движении транспортной тележки 72 сойдет с конца ходового винта 71, предшествующего зазору 83, ограничение, налагаемое спиральным ребром 71а ходового винта 71 на неподвижный копирный ролик 75, снимается. Однако запирающий элемент 94 удерживающего средства 91 переведен в позиционированное положение, как описано выше, и перемещение назад подвижного копирного ролика 76 под действием прижимающего усилия поджимающего средства 90 (сжатой цилиндрической пружины 92) предотвращается за счет контакта между крюком 94а и запираемым участком 95, и подвижный копирный ролик 76 удерживается в ожидаемом активном положении. Следовательно, после того как неподвижный копирный ролик 75 сойдет с конца ходового винта 71, предшествующего зазору 83, подвижный копирный ролик 76, положение которого относительно транспортной тележки 72 теперь зафиксировано, выталкивается назад задним спиральным ребром 71b ходового винта 71 и, поэтому, транспортная тележка 72 продолжает двигаться вперед. Кроме того, когда неподвижный копирный ролик 75 сошел с конца ходового винта 71, транспортная тележка 72 в реальности должна двигаться вперед под действием толкающего усилия поджимающего средства 90 за счет небольшого зазора между запираемым участком 95 и крюком 94а запирающего элемента 94. Другими словами, даже если имеется небольшая разница между ожидаемым активным положением подвижного копирного ролика 76, когда оба копирных ролика 75 и 76 вставлены в канавку между спиральными ребрами 71а и 71b ходового винта 71, и ожидаемым активным положением подвижного копирного ролика 76, удерживаемого запирающим элементом 94 удерживающего средства 91, эта разница столь мала, что является почти пренебрежимой.
Когда передний неподвижный копирный ролик 75, который двигался в зазоре 83 в результате продолжения движения транспортной тележки 72, достигнет положения введения в канавку между спиральными ребрами 71а и 71b следующего после зазора ходового винта 71, как показано на фиг.26, задний подвижный копирный ролик 76 подходит почти к концу ходового винта 71, предшествующего зазору 83. Затем передний неподвижный копирный ролик 75 затягивается спиральным ребром 71b ходового винта 71, расположенного после зазора 83, а задний подвижный ролик 76 выталкивается в зазор 83 спиральным ребром 71b ходового винта 71, предшествующего зазору 83. После этого передний неподвижный копирный ролик 75 принимает толкающее усилие в направлении вперед от спирального ребра 71b ходового винта, следующего после зазора 83, и, следовательно, транспортная тележка 72 продолжает двигаться вперед.
Как описано выше, задний подвижный копирный ролик 76, который движется в зазоре 83, вместе с неподвижным копирным роликом 75, вставлен в канавку между спиральными ребрами 71а и 71b запирающим элементом 94, который был переведен в позиционированное положение усилием поджимающего средства 90 и удерживается в ожидаемом активном положении, которое по существу является тем же, что и положение при прижиме к заднему спиральному ребру 71b усилием поджимающего средства 90. Поэтому, когда транспортная тележка 72 продолжает движение так, что задний подвижный копирный ролик 76, пройдя через зазор 83, подходит к положению входа в канавку между спиральными ребрами 71а и 71b ходового винта 71, расположенного после зазора 83, как показано на фиг.27, этот подвижный копирный ролик 76 плавно и надежно входит в канавку между спиральными ребрами 71а и 71b ходового винта 71, затягиваясь вперед с небольшим сопротивлением поджимающему усилию поджимающего средства 90 (сжатой цилиндрической пружины 92) задним спиральным ребром 71b ходового винта 71.
Как описано выше, когда и передний, и задний копирные ролики 75 и 76 входят в канавку между спиральными ребрами 71а и 71b ходового винта 71, следующего после зазора 83, транспортная тележка 72 вновь перемещается этим ходовым винтом 71. В этом состоянии копирный ролик 98 кулачкового механизма на запирающем элементе 94 сходит с кулачковой направляющей 97. В это время имеется небольшой зазор между запираемым участком 95 и крюком 94а запирающего элемента 94, который находится в позиционированном положении, и, поэтому, запирающий элемент надежно поворачивается вниз под действием силы тяжести и возвращается в первоначальное непозиционированное положение.
Как понятно из вышеприведенного описания, транспортная тележка 72 непрерывно приводится в движение ходовыми винтами 71, установленными концентрично и последовательно, и приводимыми во вращение в одном направлении с одинаковой частотой, при этом транспортная тележка движется по пути перемещения с заданной скоростью. В это время транспортная тележка 72 движется, получая толкающее усилие от заднего подвижного копирного ролика 76, находясь в состоянии позиционирования передним и задним копирными роликами 75, 76, взаимодействующими с ходовыми винтами 71. В этом случае транспортная тележка позиционируется только одним неподвижным копирным роликом 75, взаимодействующим с ходовым винтом 71 до или после зазора 83, или только одним подвижным копирным роликом 76, взаимодействующим с ходовым винтом до или после зазора и находящимся в состоянии ожидаемого активного положения только тогда, когда транспортная тележка 72 переходит через зазор 83, расположенный между ходовыми винтами 71, находящимися до и после этого зазора, и также приводится в движение, получая толкающее усилие.
Кроме того, когда пуль перемещения транспортной тележки 72 является прямоугольным бесконечным циклическим путем с установленным поворотными столами для подачи транспортной тележки вбок и ее поворота между путем подачи и путем возврата, снабженными соответственно ходовыми винтами 71 между конечной и начальной точками обоих путей, направление движения транспортной тележки 72 по соответствующим ходовым винтам 71 можно считать постоянным. Когда транспортная тележка 72 совершает возвратно-поступательные перемещения по одному прямому пути, направление вращения ходовых винтов 71 можно реверсировать. В этом случае, также, учитывая положение обоих концов кулачковой направляющей 97 переключающего средства 96, конструкция может быть такой, чтобы когда передний и задний копирные ролики 75 и 76 переходят через зазор 83 между ходовыми винтами 71, подвижный копирный ролик 76 позиционировался удерживающим средством 91 в ожидаемом активном положении. Другими словами, позиционное соотношение неподвижного и подвижного копирных роликов 75 и 76 до и после перехода можно задать противоположным описанному выше.
Более того, такой тип транспортирующего устройства с приводом от ходового винта способен менять скорость перемещения транспортной тележки 72 путем изменения шага спиральных ребер 71а и 71b ходовых винтов 71, при сохранении частоты вращения ходовых винтов 71 постоянной. Следовательно, имеется случай, когда желательно, чтобы путь перемещения транспортной тележки, образованный множеством ходовых винтов 71, установленных концентрично и последовательно и функционально соединенных друг с другом, был разделен на множество участков с разным шагом ходовых винтов 71, и на каждом участке скорость движения транспортной тележки 72 изменяется. В таком случае ходовые винты 71 могут иметь такую конструкцию, чтобы, несмотря на разный шаг, интервал между передним и задним копирными роликами 75, 76 (интервал, когда подвижный копирный ролик находится в ожидаемом активном положении) был по существу постоянен, а шаг винта устанавливается по существу одинаковым до и после зазора 83 между ходовыми винтами 71. В этом случае, когда копирный ролик движется по участкам с разным шагом на одном и том же ходовом винте 71, интервал между передним и задним копирными роликами 75, 76 временно меняется. Для решения этой проблемы конструкция может быть такой, чтобы такое изменение интервала между передним и задним роликами 75 и 76 поглощалось движением подвижного ролика 76 в осевом направлении ходового винта.
Кроме того, конструкция удерживающего средства 91 для позиционирования подвижного копирного ролика 76 в ожидаемом активном положении или конструкция переключающего средства 96 не ограничена показанной в этом варианте. Кроме того, в показанном варианте подвижный копирный ролик 76 поджимается поджимающим средством 90 в направлении от неподвижного копирного ролика. Однако возможна конструкция, в которой подвижный копирный ролик 76 поджимается к неподвижному копирному ролику 75. В этом случае передний и задний копирные ролики 75, 76 прижимаются к спиральным ребрам 71а и 71b, расположенным между этими копирными роликами 75, 76 усилием поджимающего средства. Более того, в описанной конструкции запирающий элемент 94, образующий удерживающее средство 91, поджимается и удерживается в непозиционированном положении силой тяжести. Однако запирающий элемент 94 может поджиматься и удерживаться в непозиционированном положении пружиной.
Ходовой винт в транспортирующем устройстве с винтовым приводом по четвертому варианту настоящего изобретения может использоваться не только как средство для приведения в движение и перемещения транспортной тележки на конвейере по рельсам, уложенным на поверхность пола, но и как средство для приведения в движение и перемещения транспортной тележки на подвесном конвейере, где рельсы подвешены на соответствующей высоте над поверхностью пола. Кроме того, положение ходового винта относительно транспортных тележек такого типа не ограничивается нижней стороной тележки, и может произвольно выбираться, например, сбоку или сверху от транспортной тележки, в соответствии с опорной структурой транспортной тележки, структурой груза и т.п. Более того, неподвижный копирный ролик и подвижный копирный ролик могут быть шарнирно установлены так, чтобы их центральные оси были ориентированы не вертикально, а горизонтально. Таким образом, в варианте, где в качестве удерживающего средства используется запирающий элемент 94, направление движения этого запирающего элемента 94 будет не вертикальным, а горизонтальным, а в качестве поджимающего средства для запирающего элемента 94 может использоваться пружина.
Пятый вариант
На фиг.28 и 29 показана часть транспортирующего устройства с винтовым приводом. Транспортная тележка 102 приводится в движение и перемещается ходовыми винтами 101 и содержит: пару из переднего и заднего не имеющих фланцев колес 104а, катящихся по одному из правого и левого направляющих рельсов 103а и 103b, пару передних и задних содержащих фланцы колес 104b, катящихся по другому направляющему рельсу 103b и охватывающих направляющий рельс 3b с правой и с левой сторон. Параллельно направляющим рельсам 103а и 103b в промежутке между этими правым и левым направляющими рельсами 103а и 103b концентрично и последовательно установлено необходимое количество ходовых винтов 101. Снизу на транспортной тележке 102 имеется копирный ролик 105, выполненный с возможностью вращения вокруг вертикального опорного вала в положении между спиральными ребрами 101а ходового винта 101. Кроме того, на одном конце соответствующих ходовых винтов, сбоку от него расположены вспомогательные ходовые винты 106, проходящие параллельно каждому ходовому винту 101. Снизу транспортной тележки 102 установлен вспомогательный копирный ролик 107, выполненный с возможностью вращения вокруг вертикального опорного вала в положении между спиральными ребрами 106а вспомогательного ходового винта 106. Более того, спиральные ребра 101а ходовых винтов 101 и спиральные ребра 106а вспомогательных ходовых винтов 106 выполнены как двухреберная система, в которой копирный ролик 105 и вспомогательный копирный ролик 107 охвачены с обеих сторон в осевом направлении ходового винта.
Концентрично обращенные друг к другу концы соответствующих ходовых винтов 101 функционально соединены для функционального вращения в одном и том же направлении с постоянной частотой через один конец вспомогательного ходового винта 106, расположенного сбоку от этих концов и с помощью трансмиссионных средств 108 и 109, в которых используется цепная (или зубчатая) передача, при этом для вращения ходовых винтов 101 в произвольном направлении (положительном или отрицательном) предусмотрен редукторный электродвигатель 111, расположенный на одном конце пути пермещения транспортной тележки 102 и соединенный с ходовым винтом 101 трансмиссионным средством с цепной (или зубчатой) передачей. Редукторный электродвигатель 111 может приводить во вращение ходовые винты 101 или вспомогательные ходовые винты 106, соединенные с ходовыми винтами 101, в соответствующем промежуточном положении на пути перемещения транспортной тележки 102.
Согласно вышеописанной конструкции, когда редукторный электродвигатель 111 включается для функционального вращения в одном направлении и с постоянной частотой всех ходовых винтов, функционально соединенных друг с другом и со вспомогательными ходовыми винтами 106 трансмиссионными средствами 108 и 109, вращающиеся ходовые винты 101 или вспомогательные ходовые винты 106 могут приводить в движение и перемещать транспортную тележку 102 в направлении подачи спиральных ребер 101а и 106а через вспомогательный копирный ролик 107 или копирный ролик 105, свободно вставленный в канавку между спиральными ребрами 101а и 106а соответствующего ходового винта 101 или вспомогательного ходового винта 106. В это время относительное положение соответствующих ходовых винтов 101, вспомогательных ходовых винтов 106, копирного ролика 105 и вспомогательного копирного ролика 107 и соотношение фаз спиральных ребер 101а и 106а соответствующих ходовых винтов 101 и 106 задано таким, чтобы транспортная тележка приводилась в движение и перемещалась так, как описано ниже.
То есть когда ходовые винты 101 и вспомогательные ходовые винты 106 приводятся в нормальное вращение так, что транспортная тележка 102 движется в направлении, показанном стрелками на фиг.18 и 19, перед тем как копирный ролик 105 сойдет с конца одного ходового винта 101, вспомогательный копирный ролик 107 входит в канавку между спиральными ребрами 106а вспомогательного ходового винта 106, расположенного рядом с ходовым винтом 101, а копирный ролик 105, который переместился между передним и задним ходовыми винтами 101, может войти в канавку между спиральными ребрами 101а следующего по ходу движения ходового винта 101 до того, как вспомогательный копирный ролик 107 сойдет с конца этого вспомогательного ходового винта 106. Следовательно, когда ходовые винты 101 и вспомогательные ходовые винты 106 приводятся во вращение в противоположную сторону, чтобы перемещать транспортную тележку 102 назад, против направления показанного стрелками, перед тем как копирный ролик 105 сойдет с конца одного ходового винта 101, вспомогательный копирный ролик входит в канавку между спиральными ребрами 106а вспомогательного ходового винта 106, расположенного рядом с концом следующего по ходу движения ходового винта 101, а копирный ролик 105, который перешел с заднего на передний ходовой винт 101, входит в канавку между спиральными ребрами 101а следующего по ходу движения ходового винта 101 до того, как вспомогательный копирный ролик 107 сойдет с конца этого вспомогательного ходового винта 106.
Пятый вариант настоящего изобретения относится к ходовым винтам 101 для привода транспортной тележки, используемым в транспортирующем устройстве с винтовым приводом, как описано выше. Элементы ходового винта 101, применяемого в пятом варианте настоящего изобретения, будут описаны со ссылками на фиг.30-32. Показанный ходовой винт 101 состоит из одного центрального вала 112 и требуемого количества (в показанном примере - восьми) цилиндрических винтовых отдельных тел 113. Центральный вал 112 является сплошным имеющим форму колонны телом вращения и состоит из шпинделя 114, на который снаружи крепятся цилиндрические винтовые отдельные тела 113, и шейки 115 меньшего радиуса, выступающей концентрично с обоих концов шпинделя 114. На обоих концах шпинделя 114 имеются спиральные валы 114а и 114b для навинчивания крепежных гаек 116а и 116b.
Соответствующие цилиндрические винтовые отдельные тела 113 имеют одинаковую структуру и размеры, и каждое из них состоит из цилиндрического основного тела 117 и спирального ребра 118, выступающего снаружи от цилиндрического основного тела 117. На одном конце цилиндрического основного тела 117 концентрично с ним выступает цилиндрическая шейка 117а. Внутри другого конца цилиндрического основного тела 117 выполнено кольцевое углубление 117b, имеющее внутренний радиус и глубину, позволяющие плотно концентрично вставлять в это углубление выступающую цилиндрическую шейку 117а другого цилиндрического винтового отдельного тела 113. В периферийных стенках выступающей цилиндрической шейки 117а и кольцевого углубления 117b, соответственно, выполнены сквозные отверстия 119 и 120, проходящие в радиальном направлении так, чтобы переходя одно в другое образовать единое сквозное отверстие, проходящее в радиальном направлении. Это сквозное отверстие формируется, когда оба цилиндрических винтовых отдельных тела 113 повернуты друг относительно друга вокруг продольной оси так, чтобы спиральные ребра 118 обоих цилиндрических винтовых отдельных тел являлись продолжением друг друга для формирования одного спирального ребра в состоянии, когда одна выступающая цилиндрическая шейка 117а одного цилиндрического винтового отдельного тела 113 вставлена в кольцевое углубление 117b другого цилиндрического винтового отдельного тела 113. Кроме того, позицией 121 обозначена торцовая крышка. Торцовая крышка 121 содержит: выступающую цилиндрическую шейку 117а, вставленную в кольцевое углубление 117b цилиндрического винтового отдельного тела 113 на стороне, в которую открыто кольцевое углубление 117b (в данном случае выбрано одно цилиндрическое винтовое отдельное тело 113 из цилиндрических винтовых отдельных тел 113, концентрично и последовательно расположенных на концах линии необходимого количества цилиндрических винтовых отдельных тел); и сквозное отверстие 119, сообщающееся со сквозным отверстием 120 в периферийной стенке кольцевого углубления 117b. Более того, спиральное ребро 118 выполнено по двухреберной системе, в которой копирный ролик 105 охвачен с обеих сторон в осевом направлении ходового винта.
Когда ходовой винт 101 собран, выступающие цилиндрические шейки 117а соответствующих цилиндрических винтовых отдельных тел 113 вставлены в кольцевые углубления 117b других соответствующих цилиндрических винтовых отдельных тел 113, как показано на фиг.31, при этом два соседних цилиндрических винтовых отдельных тела 113 повернуты друг относительно друга вокруг продольной оси так, чтобы сквозные отверстия 119 вставленных выступающих цилиндрических шеек 117а совместились со сквозными отверстиями 120 в периферийной стенке кольцевого углубления 117b. В этом состоянии в оба сквозных отверстия 119 и 120, продолжающих друг друга в радиальном направлении, как показано на фиг.32, запрессовывают соединительный элемент (например, пружинный штифт) 122, тем самым взаимно соединяя два соседних цилиндрических винтовых отдельных тела 113. Когда таким способом будет последовательно соединено необходимое количество цилиндрических винтовых отдельных тел 113, на цилиндрическое винтовое отдельное тело 113, расположенное на том конце, в сторону которого открыто кольцевое углубление 117b, устанавливают торцовую крышку 121 (с помощью соединительного элемента 122) в том же порядке, который применяется для крепления друг с другом цилиндрических винтовых отдельных тел. В ряд, состоящий из необходимого количества собранных цилиндрических винтовых отдельных тел 113, вставляют центральный вал 112 и с помощью крепежных гаек 116а и 116b, навинчиваемых на резьбу 114а и 114b на обоих концах центрального вала 112, требуемое количество цилиндрических винтовых отдельных тел, надетых на центральный вал 112, зажимают гайками 116а и 116b и крепят на центральном валу 112.
Вышеописанная сборочная операция завершает изготовление ходового винта 101, имеющего на обоих концах центрального вала 112 выступающие концентрично шейки 115 малого радиуса и спиральные ребра 101а, сформированные соответствующими спиральными ребрами 118 соответствующего количества цилиндрических винтовых отдельных тел 113, надетых на центральный вал 112, и продолжающиеся по всей длине. Кроме того, операцию сборки можно выполнять, последовательно надевая цилиндрические винтовые отдельные тела 113 на центральный вал 112, вставляя выступающие цилиндрические шейки 117а соседних цилиндрических винтовых отдельных тел 113 в кольцевые углубления 117b, и скрепляя цилиндрические тела 113 соединительными элементами 122.
Собранный таким образом ходовой винт 101 можно устанавливать в подшипниках 123, как показано на фиг.28-30, используя шейки 115 малого радиуса на обоих концах кодового винта, кроме того, на шейки 115 малого радиуса ходового винта 101, выступающие из подшипников 123, можно крепить звездочку или шестерню, являющиеся трансмиссионным средством 108-110. Более того, на вращающее усилие, передаваемое от выступающей шейки 115 малого радиуса на одном конце центрального вала, действует: трение, возникающее между торцовой поверхностью крепежных гаек 116а и 116b и выступающей шейкой 117а одного цилиндрического винтового отдельного тела 113, зажатого этими гайками 116а и 116b и торцом торцовой крышки 121; и соединительные элементы 122, соединяющие соответствующие цилиндрические винтовые отдельные тела 113 друг с другом. Таким образом, вращение передается на все цилиндрические винтовые отдельные тела 113. В результате, спиральные ребра 101а, сформированные цилиндрическими ребрами 118 соответствующих цилиндрических винтовых отдельных тел 113 и проходящие по всей длине ходового винта, вращаются интегрально, тем самым обеспечивая возможность привода и перемещения транспортной тележки 102 через копирный ролик 105, свободно вставленный в канавку между спиральными ребрами 101а.
Кроме того, кольцевые углубления 117b цилиндрических винтовых отдельных тел 113 неособенно важны. Если выступающие цилиндрические шейки 117а переделать так, чтобы они имели внешний радиус, позволяющий им плотно входить в центральное отверстие цилиндрического основного тела 117, от кольцевых углублений 117b можно избавиться. Более того, как показано на фиг.28 и 29, когда в комбинации используются вспомогательные ходовые винты 196, их конструкция может быть аналогичной конструкции ходовых винтов 101, с использованием более короткого центрального вала 112 и одного или множества цилиндрических винтовых отдельных тел 113.
В одном из вариантов, вращающее усилие между соседними цилиндрическими винтовыми отдельными телами 113 передается соединительным элементом 112, соединяющим эти тела 113 друг с другом. Однако, как показано на фиг.33-35, вращающее усилие между соседними цилиндрическими винтовыми отдельными телами 113 можно передавать с помощью ориентированной вдоль оси шпонки 124, установленной между выступающей шейкой 117а одного цилиндрического винтового отдельного тела и цилиндрическим концом другого цилиндрического винтового отдельного тела 113, надетым на выступающую шейку 117а.
В этом случае шпонка 124 может отливаться за одно целое с выступающей шейкой 117а, как показано на фиг.33 и 34, а внутри цилиндрического конца другого цилиндрического винтового отдельного тела 113 может быть выполнена шпоночная канавка 125. Как показано на фиг.35, шпоночные канавки 125а и 125b могут быть выполнены и на выступающей цилиндрической шейке 117а одного цилиндрического винтового отдельного тела 113, и внутри цилиндрического конца другого цилиндрического винтового отдельного тела 113, и в шпоночные канавки 125а и 125b может быть вставлена шпонка 124, выполненная как отдельный элемент.
Кроме того, в качестве средства для передачи вращающего усилия между соседними цилиндрическими винтовыми отдельными телами 113, как показано на фиг.36, могут быть предусмотрены соответствующие цилиндрические винтовые отдельные тела 113 с квадратной шейкой 126, концентрично выступающей из одного конца, и квадратным гнездом 127, выполненным концентрично на другом конце. Когда выступающая квадратная шейка 126 одного цилиндрического винтового отдельного тела 113 вставлена в квадратное гнездо другого цилиндрического винтового отдельного тела 113, эти соседние цилиндрические винтовые отдельные тела 113 не имеют возможности вращения друг относительно друга вокруг продольной оси. Выступающая шейка 126 и гнездо 125 могут быть, например, шестигранными.
Далее, как показано на фиг.37, шпиндель 114 центрального вала 112 может быть выполнен со шпоночной канавкой 128, проходящей по всей длине шпинделя 114, и шпонкой 130, вставленной между шпоночной канавкой 129, выполненной по меньшей мере на внутренней периферийной поверхности на одном конце соответствующих цилиндрических винтовых отдельных тел 113, и шпоночной канавкой 128 на центральном валу 112. Такая конструкция позволяет передавать вращающее усилие от центрального вала 112 на каждое соответствующее цилиндрическое винтовое отдельное тело 113. В этом случае, как показано на чертеже, на обоих концах соответствующих цилиндрических винтовых отдельных тел 113 (цилиндрических главных тел 117) выполнено сквозное отверстие 131, внутренний радиус которого точно соответствует шпинделю 114 центрального вала 112, а на внутренней периферийной поверхности сквозного отверстия 131 выполнена шпоночная канавка 129, которая открыта только наружу в осевом направлении. В результате между двумя соседними цилиндрическими винтовыми отдельными телами 113 одна шпонка 130 вставлена в шпоночную канавку 128 на центральном валу 112 и между шпоночными канавками 129 на обоих цилиндрических отдельных телах 113. В этом случае в шпоночные канавки 129 на обоих внешних концах цилиндрических винтовых отдельных тел 113 шпонки 130 не вставляются, или вставляются шпонки половинной длины, чтобы снаружи на шпоночную канавку 129 можно было навинтить крепежные гайки 116а и 116b. В конструкции, в которой на одном конце цилиндрического винтового отдельного тела 113 (цилиндрического основного тела 117) имеется выступающая цилиндрическая шейка 117а и в которой используется торцовая крышка 121, расположена шпоночная канавка 129, оба конца которой закрыты в направлении внутренней окружной поверхности выступающей цилиндрической шейки 117а. Таким способом можно реализовать конструкцию, показанную на фиг.37.
Цилиндрическое винтовое отдельное тело 113 может быть изготовлено путем приваривания спирального ребра 118, выполненного из металлической пластины на цилиндрическое основное тело, выполненное из металла. Кроме того, можно использовать способы литья за одно целое цилиндрического основного тела 117 и спирального ребра 118, например литье синтетической смолы, литье металла, и литье по выплавляемым моделям.
Кроме того, ходовой винт для привода транспортной тележки по пятому варианту настоящего изобретения может использоваться не только как средство для привода и перемещения транспортной тележки на конвейере, в котором направляющие рельсы уложены на поверхности пола, но и как средство для привода и перемещения транспортной тележки на подвесном конвейера, в котором рельсы подвешены на определенной высоте над поверхностью пола. В качестве альтернативы, положение ходовых винтов относительно транспортной тележки не ограничивается нижней стороной транспортной тележки. Оно может быть выбрано произвольно, например, сбоку или сверху от транспортной тележки в соответствии с опорной структурой транспортной тележки, структурой груза и т.п. Поэтому, как показано в этом варианте, если в комбинации с ходовыми винтами 101 используются расположенные рядом вспомогательные ходовые винты 106, положение этих вспомогательных ходовых винтов 106 относительно ходовых винтов 101 не ограничивается горизонтальной плоскостью. Эти ходовые винты могут быть расположены друг относительно друга в вертикальной плоскости.
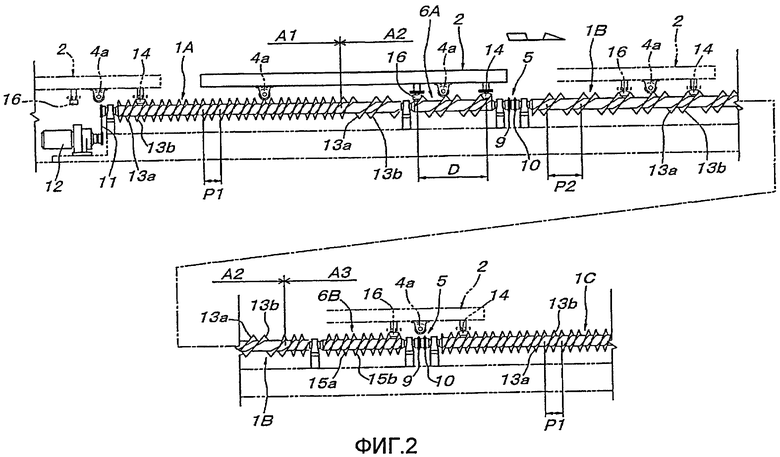
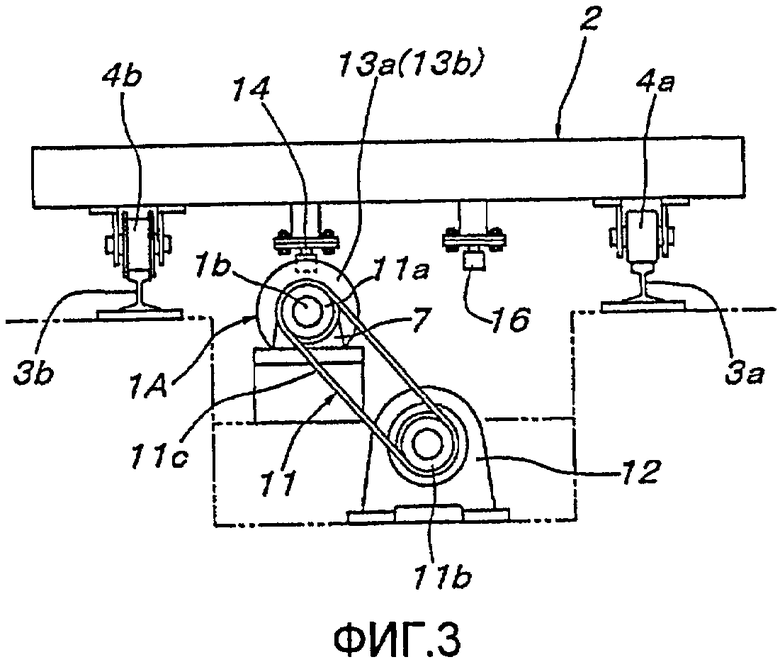
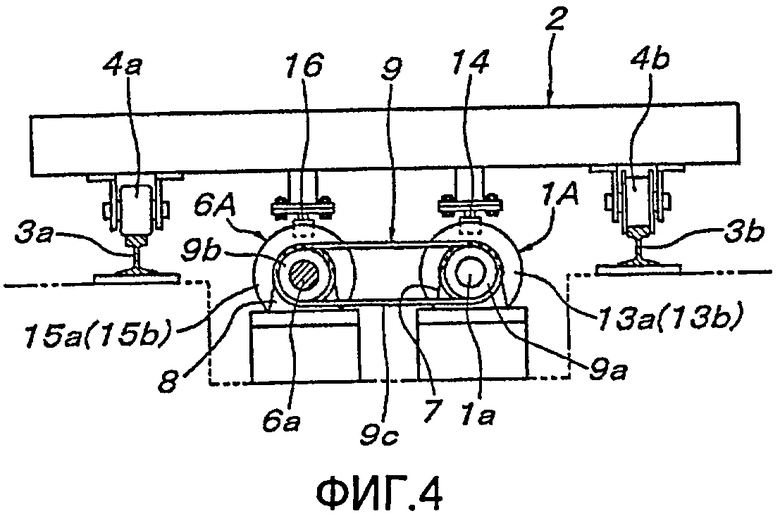
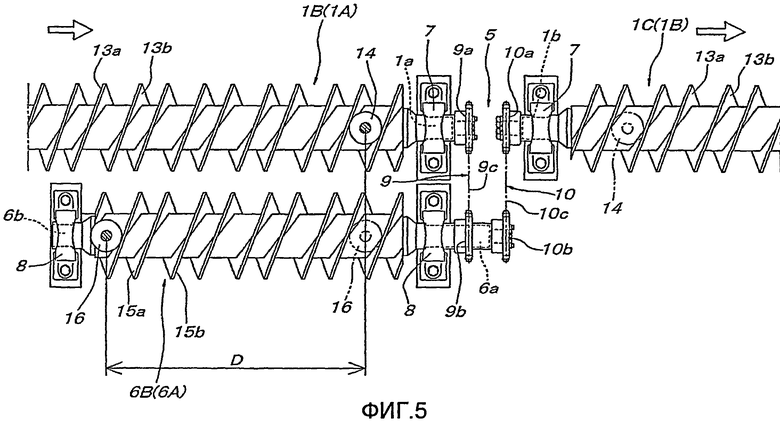
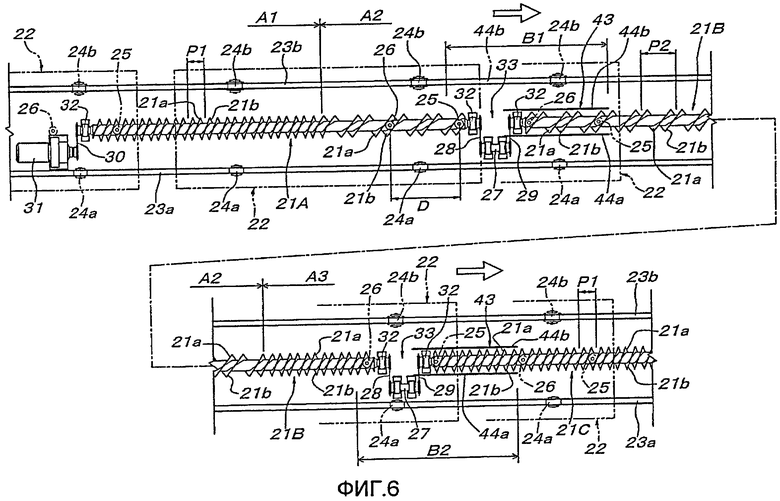
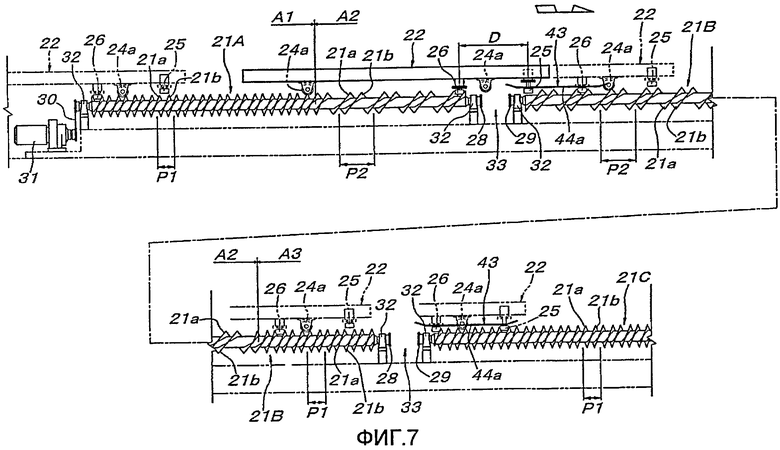
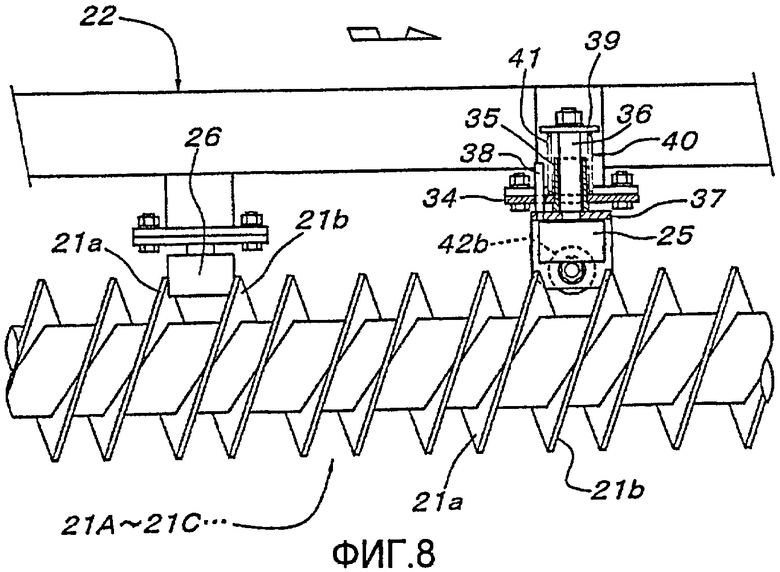
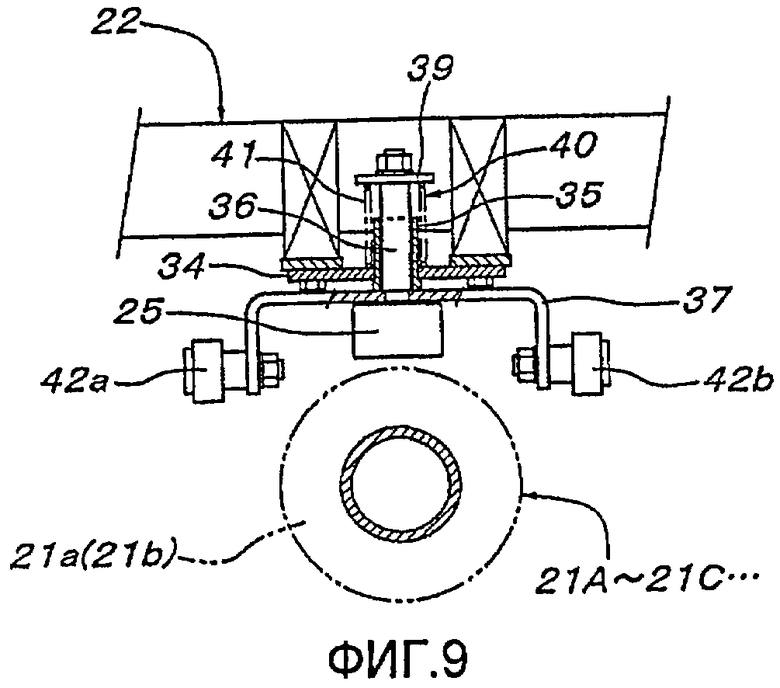
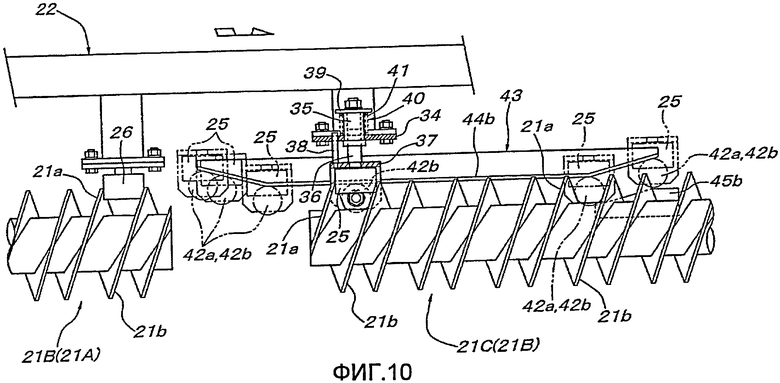

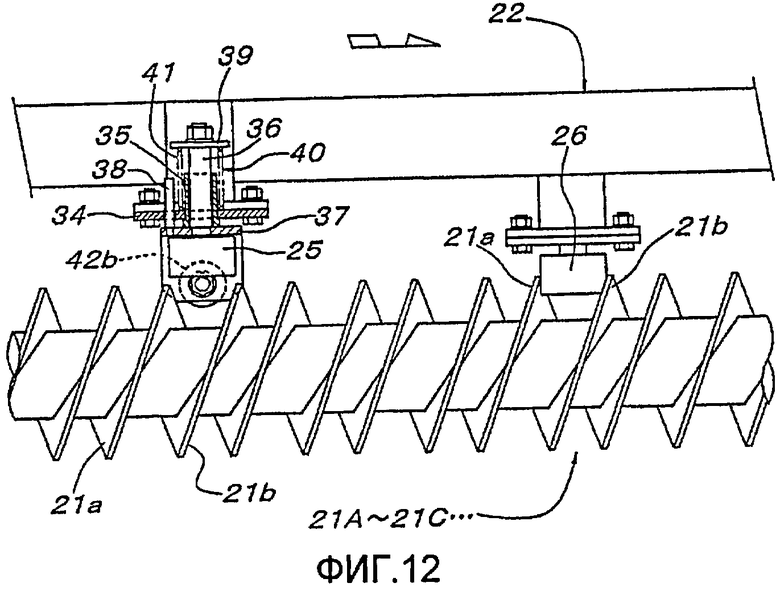
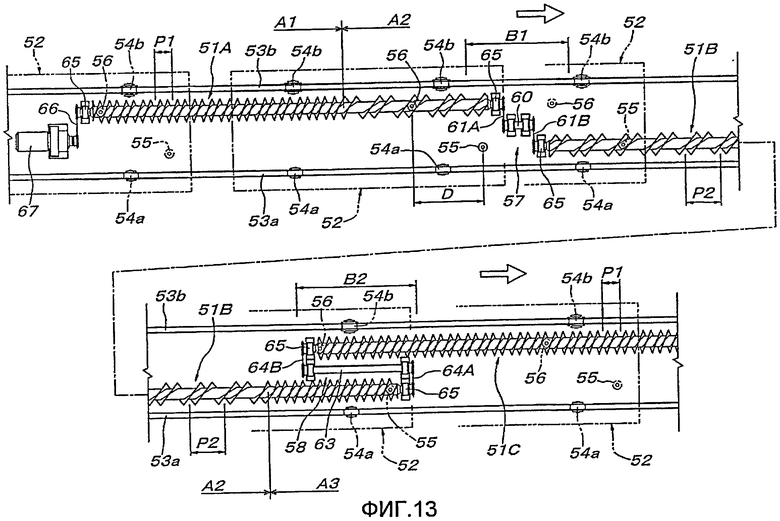
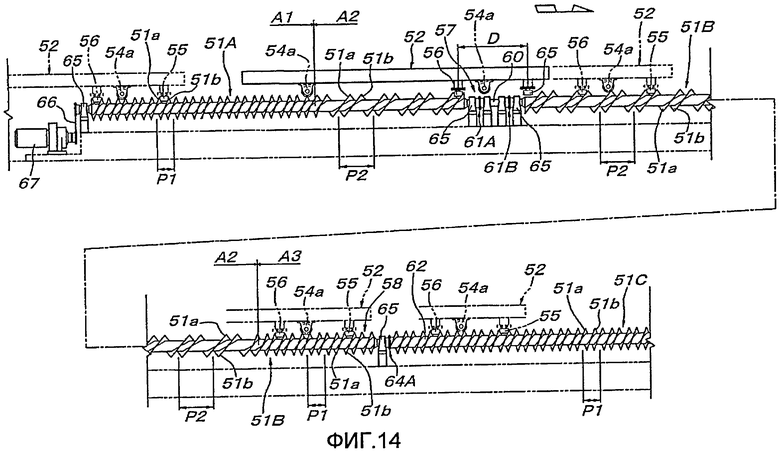
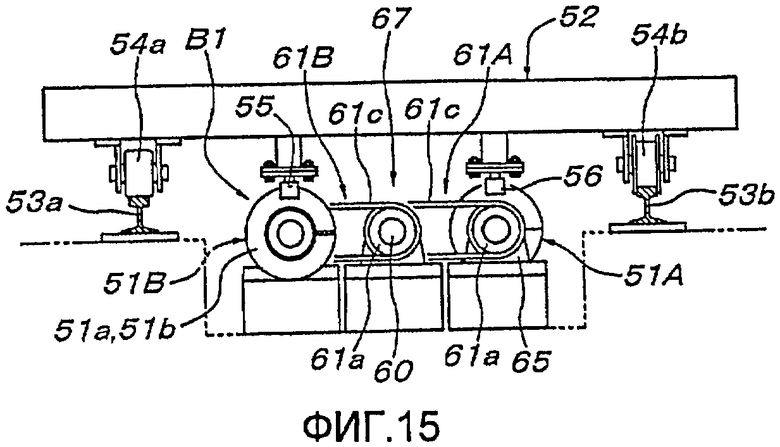
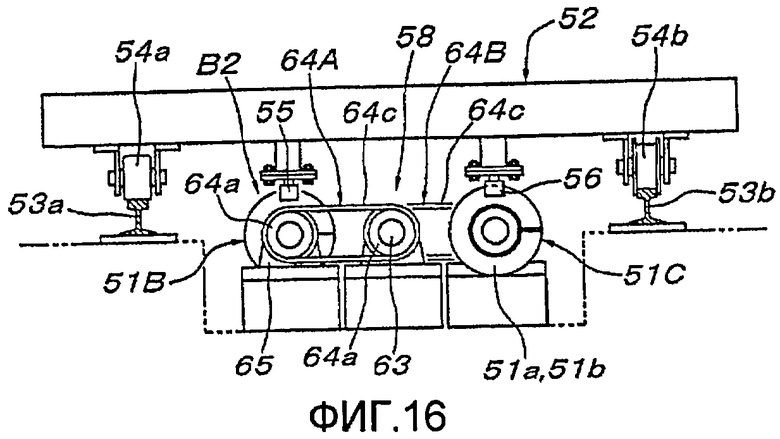
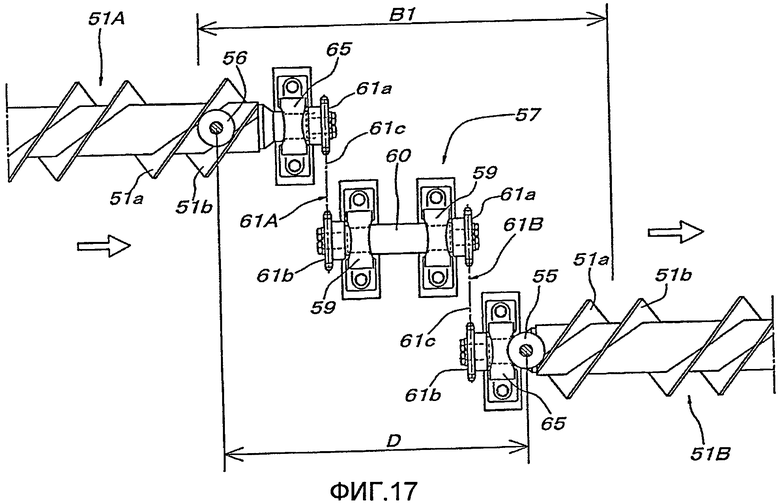
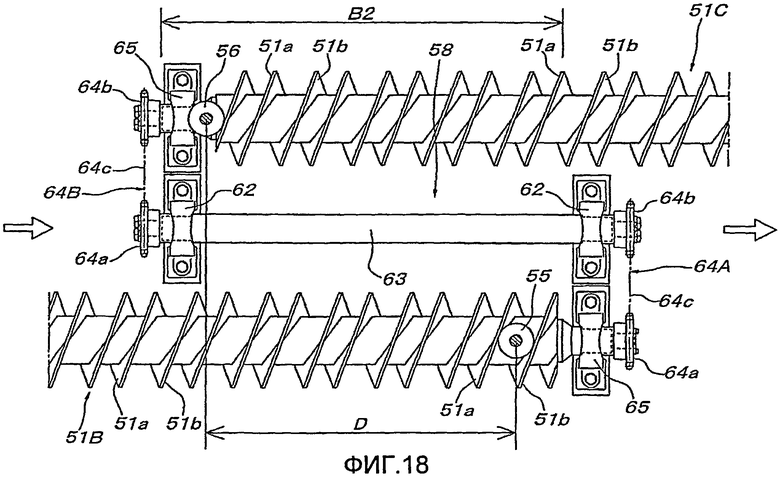
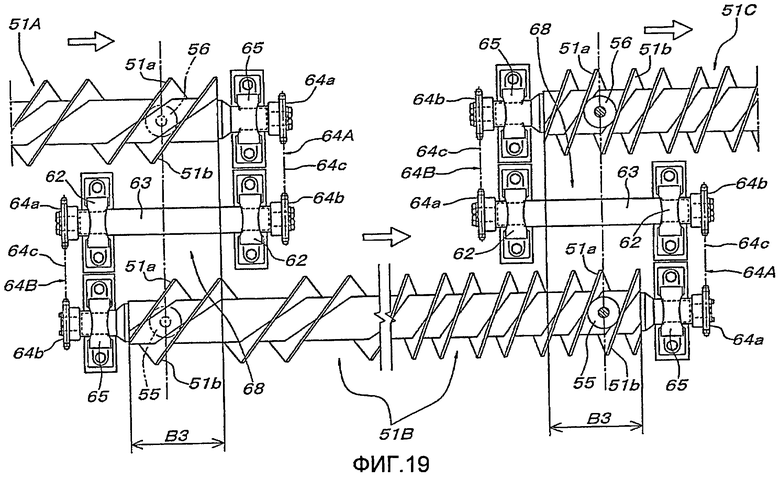
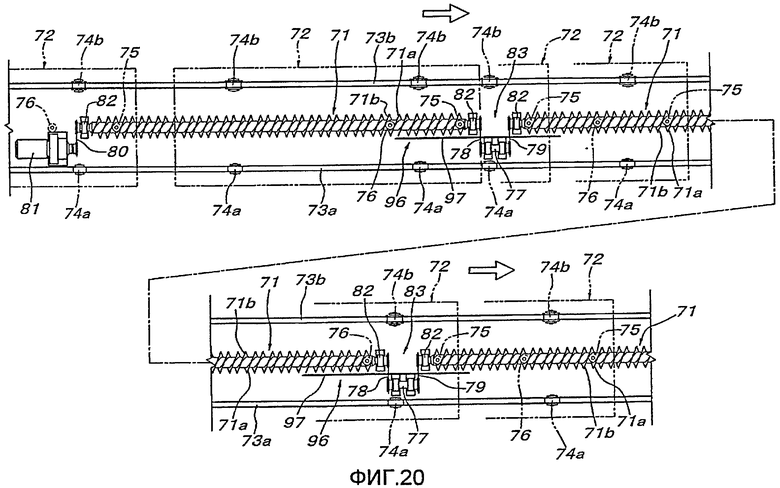
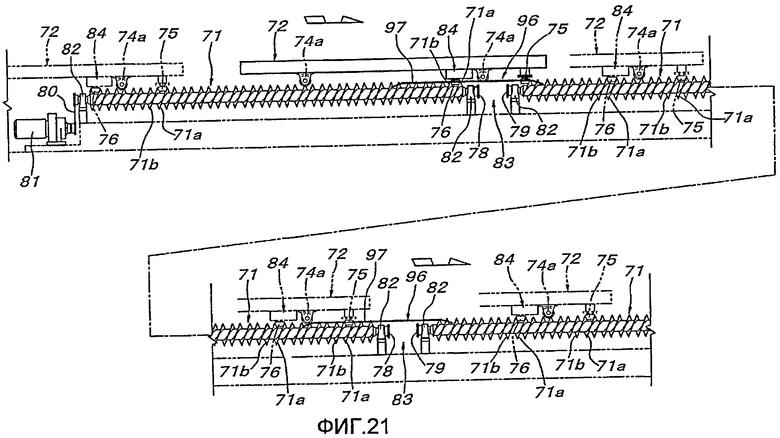
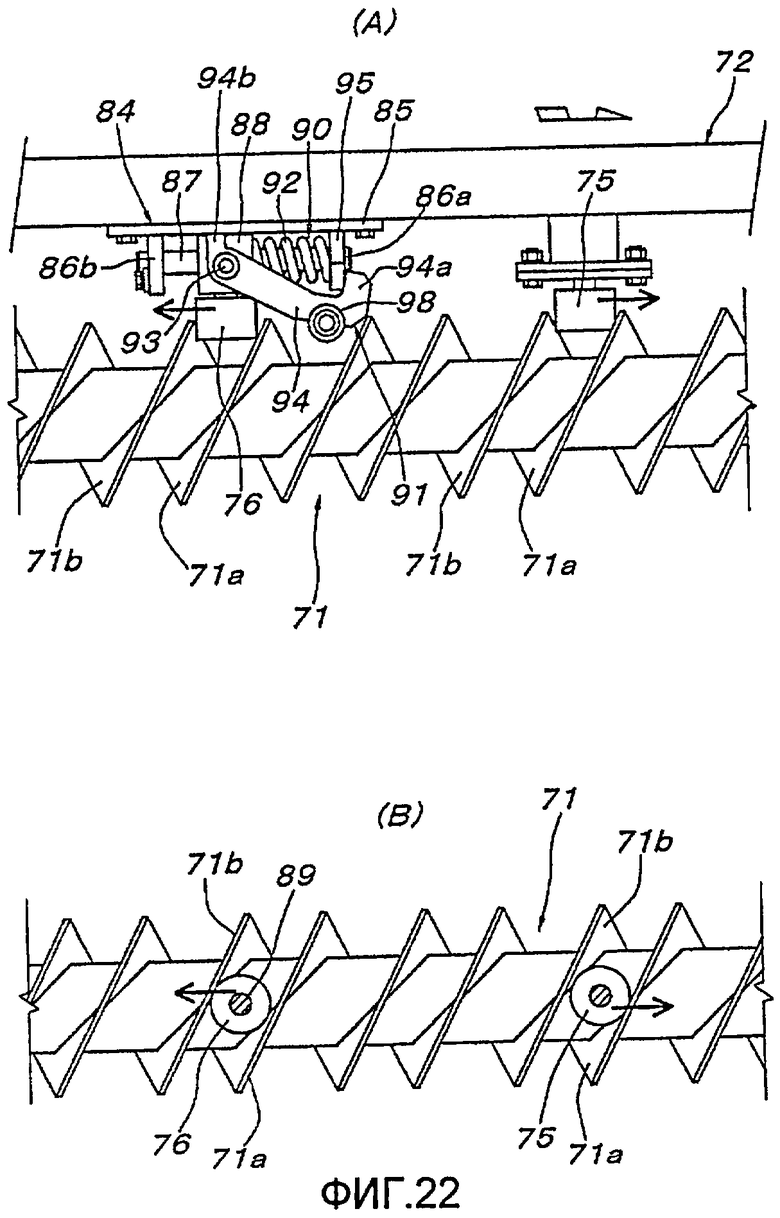
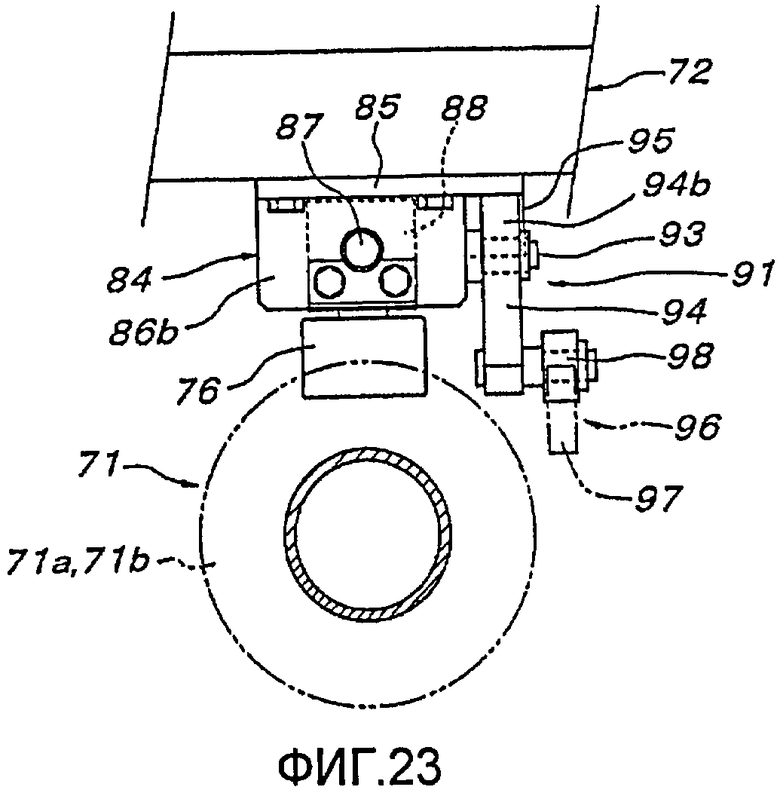

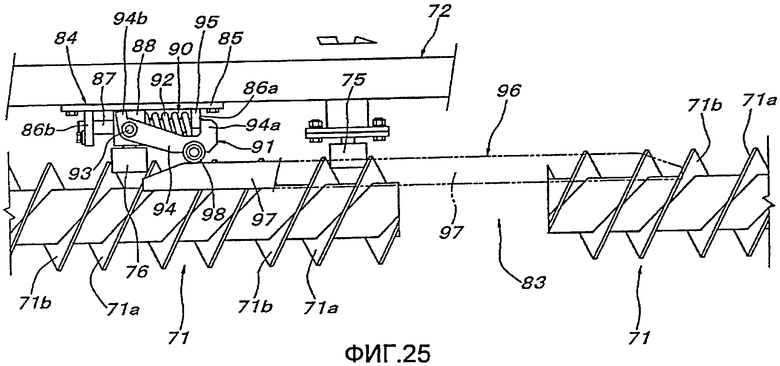
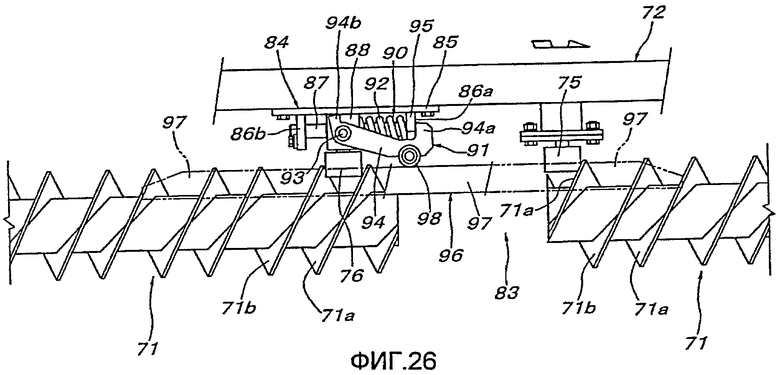
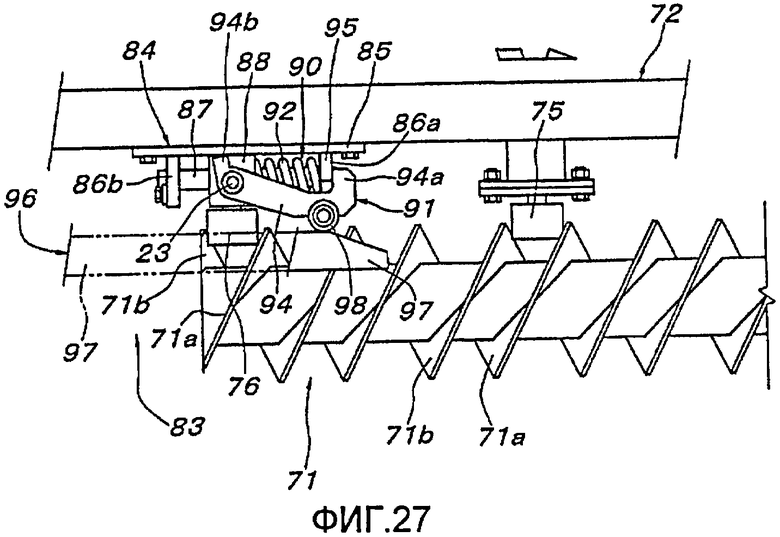
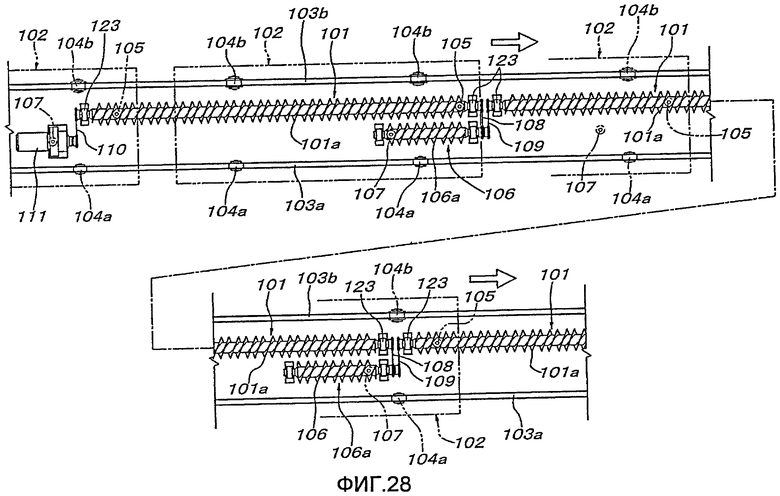
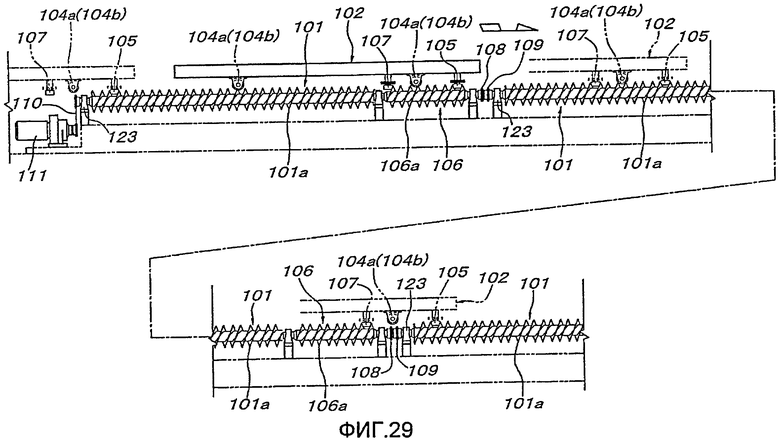

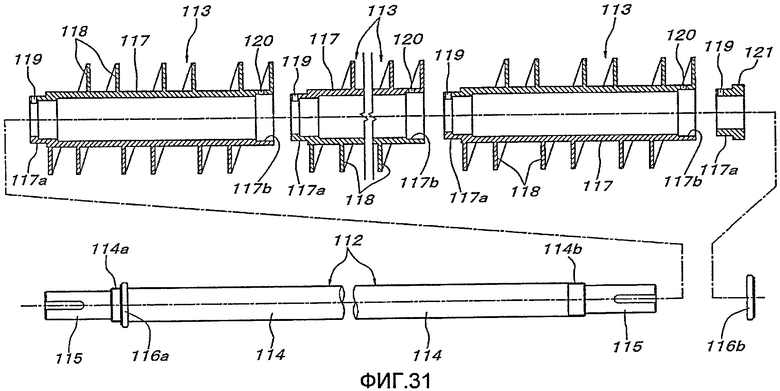
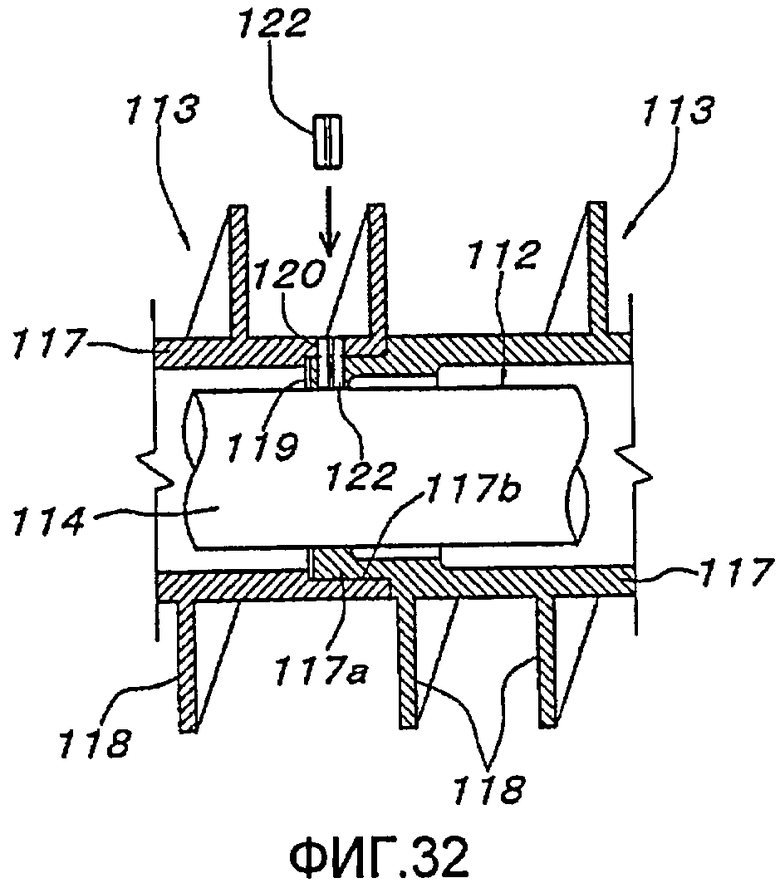
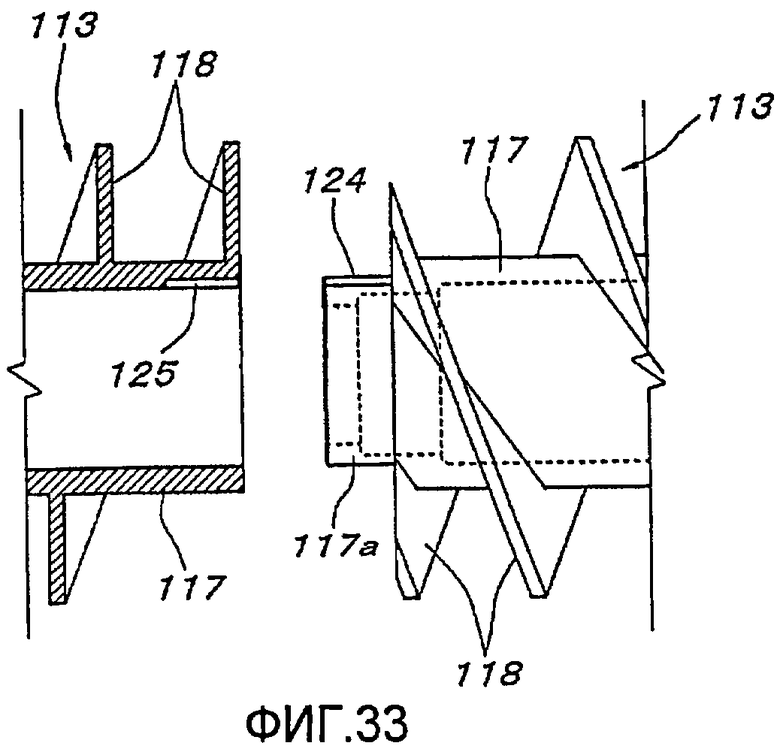
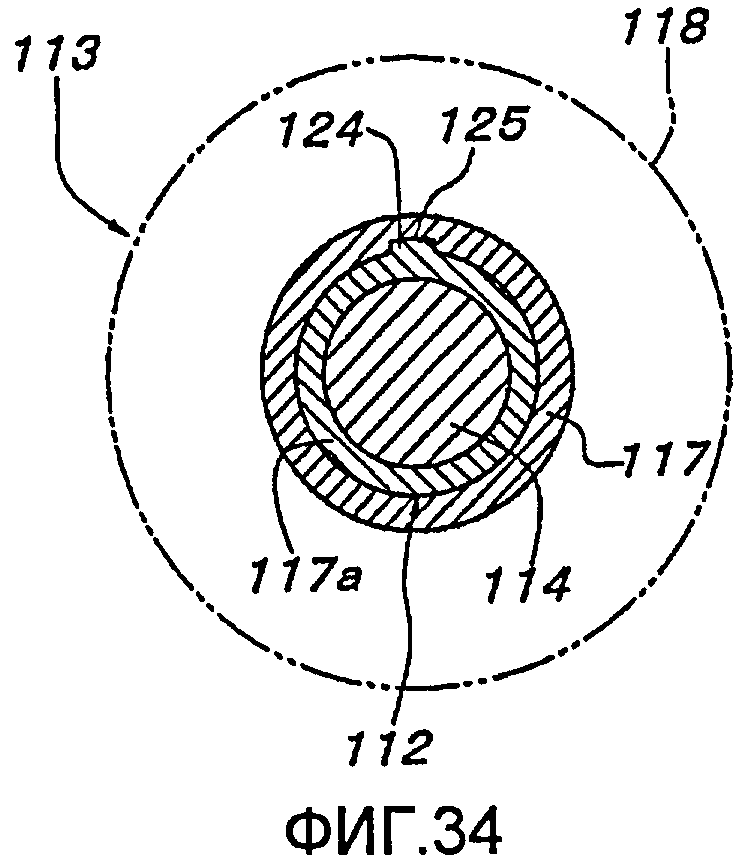
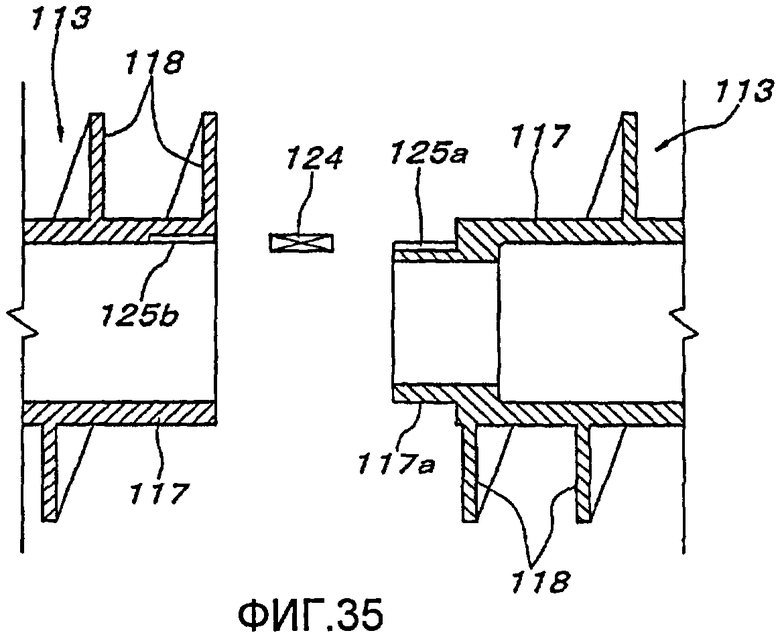
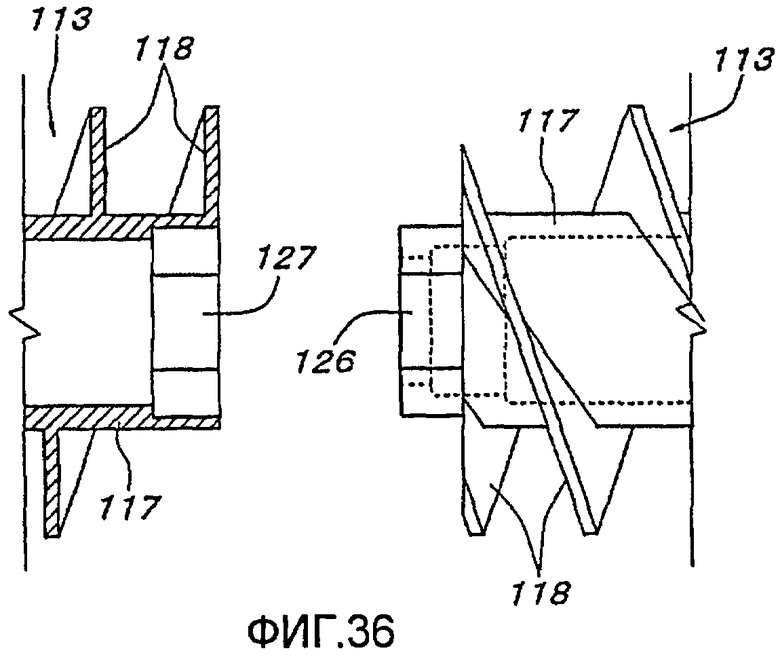
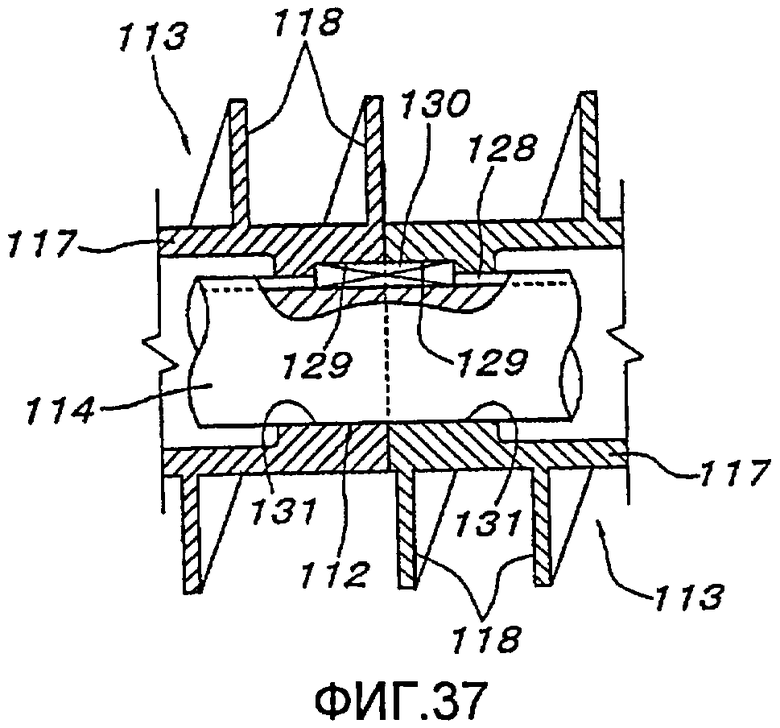
Транспортная тележка (2) перемещается по ходовым винтам (1a, 1b) посредством копирного ролика (14). По первому варианту изобретения имеется вспомогательный ходовой винт (6а) и вспомогательный копирный ролик (16) на тележке. По второму варианту изобретения тележка имеет второй копирный ролик, выполненный с возможностью отведения от ходового винта. По третьему варианту изобретения тележка имеет два копирных ролика, поочередно входящих в зацепление с двумя соответствующими ходовыми винтами. Обеспечивается возможность изменения шага винта на конкретном участке пути. 3 н. и 10 з.п. ф-лы, 37 ил.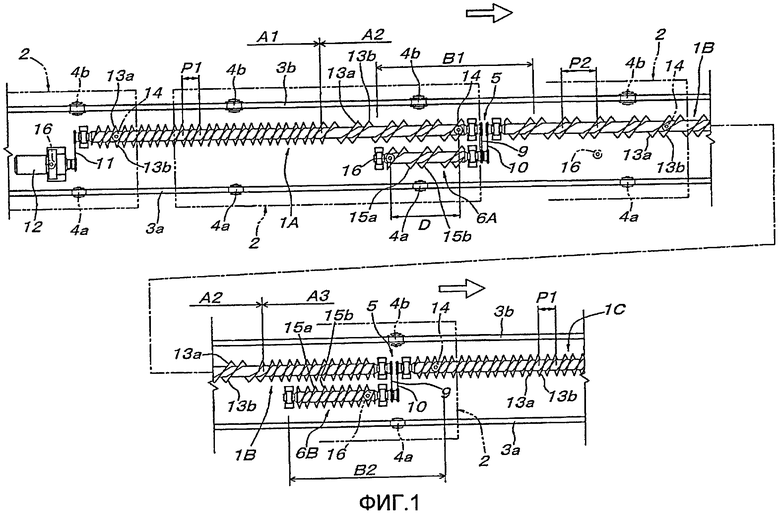
1. Транспортирующее устройство с винтовым приводом, имеющее конструкцию, в которой:
приводимые во вращение ходовые винты расположены вдоль пути перемещения транспортной тележки;
транспортная тележка снабжена копирным роликом, находящимся в зацеплении с ходовыми винтами; и
транспортная тележка перемещается вращением ходовых винтов, при этом множество ходовых винтов расположено концентрично и последовательно с зазорами между соответствующими ходовыми винтами;
сбоку от примыкающего к зазору конца одного из двух ходовых винтов, расположенных до и после зазора рядом с этими ходовыми винтами расположены более короткие вспомогательные ходовые винты;
вспомогательные ходовые винты функционально соединены с ходовыми винтами для вращения и имеют одинаковый с соседними ходовыми винтами шаг;
транспортная тележка в дополнение к копирному ролику снабжена вспомогательным копирным роликом, входящим в зацепление с вспомогательным ходовым винтом, и
интервал в осевом направлении ходового винта между копирным роликом и вспомогательным копирным роликом и длина вспомогательного ходового винта заданы такими, что, когда копирный ролик движется через зазор между ходовыми винтами, вспомогательный копирный ролик находится в зацеплении с вспомогательным ходовым винтом.
2. Устройство по п.1, в котором
концы соответствующих ходовых винтов, примыкающие к зазорам между ходовыми винтами, функционально соединены друг c другом двумя трансмиссионными средствами, соединяющими концы ходовых винтов, примыкающие к зазору, с вспомогательными ходовыми винтами.
3. Устройство по п.1, в котором
на переходном участке, имеющем один вспомогательный ходовой винт и один зазор между ходовыми винтами, шаг ходового винта и вспомогательного ходового винта не меняется,
в положении, не являющемся переходным участком, находится граница между двумя (передним и задним) участками, имеющими разный шаг ходового винта, и
шаг ходового винта и вспомогательного ходового винта на переходном участке задан как кратная часть интервала в осевом направлении ходового винта между копирным роликом и вспомогательным копирным роликом.
4. Транспортирующее устройство с винтовым приводом, имеющее конструкцию, в которой:
приводимые во вращение ходовые винты расположены вдоль пути перемещения транспортной тележки;
транспортная тележка снабжена копирным роликом, находящимся в зацеплении с ходовыми винтами; и
транспортная тележка перемещается вращением ходовых винтов, при этом множество ходовых винтов расположено концентрично и последовательно с зазорами между соответствующими ходовыми винтами;
на транспортной тележке в двух положениях, являющихся передним и задним положениями, шарнирно установлены передний и задний копирные ролики, вставленные между спиральными ребрами и разнесенные в осевом направлении ходового винта на расстояние, превышающее длину зазора между ходовыми винтами,
причем один копирный ролик является копирным роликом с фиксированным положением,
а второй копирный ролик выполнен с возможностью свободного перемещения между активным положением между спиральными ребрами ходовых винтов, и неактивным положением, отведенным от спиральных ребер,
предусмотрено удерживающее средство для удержания подвижного копирного ролика в неактивном положении,
при этом в зазоре между ходовыми винтами установлено переключающее средство для временного перевода подвижного копирного ролика из неактивного положения в активное, и
когда копирный ролик с фиксированным положением переходит с ходового винта, находящегося перед зазором, на ходовой винт, находящийся после зазора, подвижный копирный ролик, временно переведенный в активное положение, взаимодействует с ходовым винтом, находящимся до или после зазора.
5. Устройство по п.4, в котором
подвижный копирный ролик шарнирно установлен на подвижном теле, установленном с возможностью перемещения в определенном диапазоне по прямой, параллельной центральной оси подвижного копирного ролика, при этом удерживающее средство образовано пружиной, поджимающей подвижное тело в направлении от ходовых винтов, чтобы удерживать подвижный копирный ролик в неактивном положении, а
переключающее средство образовано кулачковой направляющей для удержания подвижного копирного ролика, воздействуя на копирный ролик кулачкового механизма, установленный на подвижном теле, для перемещения подвижного копирного ролика в активное положение.
6. Устройство по п.5, в котором
на подвижном теле шарнирно установлены два копирных ролика кулачкового механизма, расположенных по обе стороны от ходового винта, а
кулачковая направляющая образована парой кулачковых направляющих, установленных рядом для соответствующего воздействия на два копирных ролика кулачкового механизма.
7. Устройство по п.5, в котором
предусмотрена кулачковая направляющая принудительного возврата для принудительного возврата подвижного копирного ролика в неактивное положение путем воздействия на копирный ролик кулачкового механизма после того, как копирный ролик кулачкового механизма сойдет с кулачковой направляющей.
8. Устройство по п.4, в котором
на переходном участке, содержащем один зазор между ходовыми винтами и установленное в нем переключающее средство, шаг ходовых винтов не меняется,
в положении, не являющемся переходным участком, находится граница между двумя (передним и задним) участками, имеющими разный шаг ходового винта, и
шаг ходового винта и вспомогательного ходового винта на переходном участке задан как кратная часть интервала в осевом направлении ходового винта между копирным роликом с фиксированным положением и подвижным копирным роликом.
9. Транспортирующее устройство с винтовым приводом, имеющее конструкцию, в которой:
приводимые во вращение ходовые винты расположены вдоль пути перемещения транспортной тележки;
транспортная тележка снабжена копирным роликом, находящимся в зацеплении с ходовыми винтами; и
транспортная тележка перемещается вращением ходовых винтов, при этом множество ходовых винтов расположено на пути перемещения транспортной тележки в две линии зигзагом так, что последовательно расположенные ходовые винты находятся на разных линиях,
транспортная тележка снабжена двумя копирными роликами, каждый из которых выполнен с возможностью соответственного взаимодействия с двумя линиями ходовых винтов, расположенных в каждой линии концентрично и последовательно, и
два копирных ролика поочередно входят в зацепление с ходовыми винтами в соответствующих линиях на участке, не являющемся переходным участком между двумя ходовыми винтами, расположенными до и после и в разных линиях и расположены так, что на переходном участке перед тем как один копирный ролик сойдет с предшествующего ходового винта другой копирный ролик входит в зацепление с последующим ходовым винтом другой линии.
10. Устройство по п.9, в котором
чередуются первый переходный участок, на котором предыдущий и последующий ходовые винты, расположенные на разных линиях, соответственно разнесены в осевом направлении ходового винта, и второй переходный участок, на котором концы предыдущего и последующего ходовых винтов, расположенных до и после, и находящихся на разных линиях, перекрывают друг друга и
два копирных ролика разнесены друг от друга в осевом направлении ходовых винтов на расстояние, превышающее интервал в осевом направлении ходовых винтов между предыдущим и последующим ходовыми винтами, обращенными друг к другу и расположенными на разных линиях на первом переходном участке, и короче, чем длина перекрытия концов двух ходовых винтов на втором переходном участке.
11. Устройство по п.10, в котором
на первом и втором переходных участках шаг ходовых винтов не меняется, в положении, не являющемся первым и вторым переходными участками, находится граница между двумя (передним и задним) участками, имеющими разный шаг ходового винта, и
шаг ходового винта и вспомогательного ходового винта на переходном участке задан как кратная часть интервала в осевом направлении ходового винта между двумя копирными роликами.
12. Устройство по п.9, в котором
переходный участок выполнен так, что концы предыдущего и последующего ходовых винтов, расположенных на разных линиях, соответственно перекрывают друг друга, и
два копирных ролика расположены симметрично и разнесены друг от друга в направлении, перпендикулярном осевому направлению ходового винта для одновременного зацепления с концами ходовых винтов, расположенных до и после переходного участка и расположенных на разных линиях.
13. Устройство по п.12, в котором
на переходном участке шаг ходового винта не меняется,
в положении, не являющемся переходным участком, находится граница между двумя (передним и задним) участками, имеющими разный шаг ходового винта.
| JP 2008114995 А, 22.05.2008 | |||
| JP 2002226029 A, 14.08.2002 | |||
| JP 2001122422 A, 08.05.2001 | |||
| JP 9058463 A, 04.03.1997 | |||
| JP 8143128 A, 04.06.1996 | |||
| JP 58135016 A, 11.08.1983. |

