Область техники
Настоящее изобретение относится к транспортирующему устройству, выполненному с возможностью выборочного перемещения стола, несущего транспортируемые объекты, который также выполнен с возможностью подъема и опускания на корпусе транспортирующего устройства, например, каретки в поднятое положение криволинейной направляющей, установленной сбоку от маршрута транспортировки.
Уровень техники
Для транспортирующего устройства, относящегося к типу, описанному в Патентном Документе 1, стол, несущий транспортируемые объекты, установлен на корпусе транспортирующего устройства с возможностью свободного подъема и опускания с помощью свободно поднимающегося рычажного механизма, причем на заданном участке маршрута транспортировки расположены криволинейные направляющие, которые выборочно поднимают стол, несущий транспортируемый объект, в поднятое положение, воздействуя на приводной узел рычажного механизма.
Патентный Документ 1: опубликованная не прошедшая экспертизу заявка на патент Японии №Н07-172538.
Следовательно, обычно при такой конфигурации транспортирующего устройства, если приводной узел, имеющийся на рычажном механизме, состоит из поднимающего/опускающего штока, упирающегося в рычажный механизм, как описано, например, в Патентном Документе 1, то в случае поломки, например при поломке приводного узла (поднимающего/опускающего штока), вызванной износом материала или перегрузкой, созданной массой транспортируемого объекта, стол, несущий транспортируемые объекты, который удерживался в поднятом положении приводным узлом (поднимающим/опускающим штоком) и криволинейными направляющими, упадет до предельного положения опускания под воздействием силы тяжести и нанесет удар, который может привести к несчастному случаю, влекущему травмы или смертельный исход.
Краткое описание изобретения
Целью настоящего изобретения является создание транспортирующего устройства, в котором можно устранить описанные выше проблемы известных устройств и которое будет описано ниже со ссылками на позиции, приведенные в скобках. В транспортирующем устройстве стол (3), несущий транспортируемые объекты, опирается на транспортную тележку (1) с возможностью свободного подъема и опускания посредством свободно поднимающегося рычажного механизма (12), при этом на заданном участке маршрута транспортировки с боковой стороны транспортной тележки (1) установлена криволинейная направляющая (40), которая выборочно перемещает стол (3) в поднятое положение, воздействуя на приводной узел (14) рычажного механизма (12) для подъема рычажного механизма (12), причем устройство содержит запираемый участок (33), который совершает возвратно-поступательные перемещения в направлении, близком к горизонтальному, в результате подъема/опускания рычажного механизма (12), запирающую защелку (34), которая автоматически защелкивается на запираемом участке (33), когда стол (3) поднят в заданное положение, а на конечной части заданного участка установлен отпирающий кулачок (41), который в результате движения транспортной тележки (1) переводит запирающую защелку (34) в разомкнутое положение.
Согласно второму аспекту настоящего изобретения рычажный механизм (12) содержит два пантографа (13а и 13b), расположенных вблизи друг друга и соединенных друг с другом, при этом запираемый участок (33) может состоять из скользящей опорной оси (25) на транспортной тележке (1), подвешенной на концах между двумя пантографами (13а и 13b).
Кроме того, согласно третьему аспекту настоящего изобретения при наличии множества различных участков, отличающихся высотой поднятого положения стола (3), несущего транспортируемый объект, в запирающей защелке (34) может быть выполнено множество защелкивающихся участков (34b и 34c) так, чтобы соответствовать поднятым положениям стола (3) на разных заданных участках. Конфигурация согласно третьему аспекту настоящего изобретения может комбинироваться с конфигурацией согласно первому или второму аспектам изобретения.
Хотя приводной узел (14), выполненный на рычажном механизме (12), может иметь любую конфигурацию, согласно четвертому аспекту настоящего изобретения рычаги (15а и 15b) рычажного механизма (12) расположены параллельно направлению движения транспортирующего движущегося корпуса (1), причем на рычаге (15а), снабженном опорной осью (19), фиксирующей положение на боковой стороне транспортной тележки (1), может быть на оси установлен ролик (31) кулачкового следящего элемента, выступающий вниз относительно транспортной тележки (1) в положении, находящемся вблизи с опорной осью (19), фиксирующей положение, а приводной узел (14) может состоять из ролика (31) кулачкового следящего элемента. Конфигурация согласно четвертому аспекту настоящего изобретения может комбинироваться с конфигурациями согласно любому из первого, второго и третьего аспектов изобретения.
Более того, если применяется конфигурация согласно четвертому аспекту настоящего изобретения, то согласно пятому аспекту рычажный механизм (12) содержит пару, состоящую из правого и левого пантографов (13а, и 13b), соединенных друг с другом, при этом каждый пантограф (13а и 13b) содержит пару рычагов (15а и 15b), при этом рычаги (15а) на стороне транспортной тележки (1) снабжены опорными осями (19), фиксирующими положение, и могут соединяться друг с другом соединительным элементом (28) в положении, расположенном вблизи опорных осей (19), при этом на оси под соединительным элементом (28) может быть установлен ролик (31) кулачкового следящего элемента.
Кроме того, когда применяется конфигурация согласно пятому аспекту настоящего изобретения, то согласно шестому аспекту настоящего изобретения желательно, чтобы рычаги (15а и 15b) рычажного механизма (12) были расположены в направлении, где опорные оси (19 и 14), фиксирующие положение, на одном конце были расположены впереди в направлении движения корпуса (1) относительно скользящих опорных осей (20 и 25), расположенных на другом конце.
С помощью транспортирующего устройства согласно настоящему изобретению с вышеописанной конфигурацией даже в ситуации поломки приводного участка рычажного механизма запирающие защелки, которые автоматически защелкнулись на запираемых участках рычажного механизма, предотвратят падение рычажного механизма, то есть опускание стола, несущего транспортируемые объекты, так что предотвращается возможность несчастных случаев, связанных с падением этого стола, и повышается безопасность. Более того, устраняется необходимость в специальном приводе или источнике питания для запирания рычажного механизма в поднятом положении в начале заданного участка (запирание стола, несущего транспортируемый объект, в поднятом положении) и его размыкание в конце заданного участка, так что настоящее изобретение легко реализуется и не приводит к увеличению трудоемкости или к существенному росту себестоимости.
Запираемые участки также могут быть выполнены на рычагах в положениях, расположенных вблизи скользящей опорной оси с боковой стороны транспортной тележки. Однако в этом случае запираемые участки также намного перемещаются вверх и вниз в результате подъема/опускания рычажного механизма. Соответственно, желательно разместить запираемые участки концентрично со скользящей опорой на боковой стороне транспортирующего движущегося корпуса рычажного механизма; хотя, в частности, когда согласно второму аспекту настоящего изобретения рычажный механизм содержит два пантографа, расположенных вблизи друг друга и соединенных друг с другом, в качестве запираемых участков можно использовать скользящую опорную ось на боковой стороне транспортной тележки, которая подвешена между двумя пантографами, так что изобретение может быть реализовано дешевым и простым способом. Более того, поскольку скользящая опорная ось не выполняет движение вверх или вниз, можно обеспечить надежное автоматическое запирание защелками.
Более того, при конфигурации согласно третьему аспекту настоящего изобретения стол, несущий транспортируемые объекты, можно запирать во множестве поднятых положений, отличающихся по высоте, используя одну запирающую защелку, что сокращает себестоимость и упрощает конструкцию устройства по сравнению с множеством запирающих защелок и отпирающих кулачков, соответствующих запирающим защелкам, для каждого из соответствующих положений подъема.
Далее, при конфигурации согласно четвертому варианту настоящего изобретения приводной узел, взаимодействующий с криволинейной направляющей сбоку от маршрута транспортировки, состоит из ролика кулачкового следящего элемента, установленного на оси на рычагах рычажного механизма, причем посредством ролика кулачкового следящего механизма криволинейная направляющая непосредственно толкает вверх рычажный механизм, осуществляя движение подъема. Следовательно, даже если наклон участка криволинейной направляющей, толкающей вверх приводной узел (ролик кулачкового следящего механизма), будет увеличен для сокращения длины хода транспортной тележки, необходимого для выталкивания стола, несущего транспортируемые объекты, в поднятое положение, рычажный механизм может совершать движение подъема более плавно и с меньшими затруднениями, чем при обычном вертикальном перемещении поднимающего/опускающего штока. Другими словами, наклон участка криволинейной направляющей, толкающего приводной узел, можно увеличивать для повышения эффективности транспортного маршрута. Дополнительно, поскольку отсутствует поднимающий/опускающий шток, используемый в прототипе и подверженный поломкам из-за перекашивания, настоящее изобретение легко может использоваться для транспортировки тяжелых объектов. Разумеется, в этой конструкции поднимающий/опускающий шток, его направляющие средства, механизм, преобразующий движение подъема штока в поворотное движение рычагов рычажного механизма, и т.п. более не нужны, так что устройство согласно настоящему изобретению является дешевым и имеет меньшее количество деталей.
Если рычажный механизм содержит пару пантографов, расположенных слева и справа, как это предусмотрено конструкцией согласно пятому аспекту настоящего изобретения, по сравнению с ситуацией, когда правый и левый пантографы снабжены роликами кулачкового следящего элемента, то необходим только один ролик кулачкового следящего элемента и одна криволинейная направляющая, так что устройство согласно настоящему изобретению имеет меньшую себестоимость и более простую конструкцию, при этом оба пантографа могут осуществлять движения подъема/опускания, надежно синхронизированные криволинейной направляющей, расположенной сбоку от маршрута транспортировки.
Дополнительно, в конструкции согласно шестому аспекту настоящего изобретения, когда рычаги рычажного механизма проходят в направлении, где опорные оси фиксации положения на одном конце расположены сзади в направлении движения транспортной тележки, относительно скользящих опорных осей на другом конце, приводной узел (ролик кулачкового следящего элемента) можно с помощью криволинейной направляющей подвести ближе к опорным осям фиксирующих положение рычагов. Другими словами, приводной узел (ролик кулачкового следящего элемента) можно подводить криволинейной направляющей ближе к опорным осям, фиксирующим положение рычагов для увеличения высоты поднятого положения стола, несущего транспортируемый объект, одновременно уменьшая величину выталкивания (высоту криволинейной направляющей) приводного узла (ролика кулачкового следящего элемента), так что транспортная тележка может иметь конструкцию с пониженной погрузочной высотой.
Краткое описание чертежей
Фиг.1А - схематичный вид сбоку с частичным продольным сечением базовой конфигурации устройства транспортной тележки;
Фиг.1В - схематичный вид сверху устройства с фиг.1А;
Фиг.2 - вид сбоку в продольном сечении рычажного механизма с запирающим средством согласно настоящему изобретению;
Фиг.3 - вид сзади в продольном сечении рычажного механизма, поднятого криволинейной направляющей;
Фиг.4 - вид сверху в поперечном сечении рычажного механизма в опущенном положении;
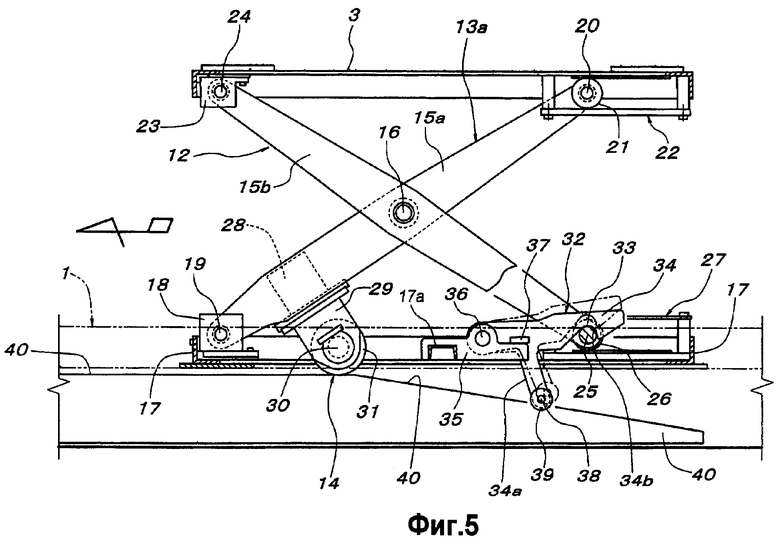
Фиг.5 - вид сбоку в продольном сечении рычажного механизма в поднятом криволинейной направляющей положении;
Фиг.6 - вид сбоку в продольном сечении запирающего механизма показанного рычажного механизма в разомкнутом состоянии;
Фиг.7 - вид сзади в продольном сечении рычажного механизма согласно второму варианту настоящего изобретения, поднятого криволинейной направляющей; и
Фиг.8 - вид сбоку в продольном сечении запирающего средства рычажного механизма согласно второму варианту в отпертом состоянии.
Описание предпочтительных вариантов осуществления изобретения
Далее следует подробное описание настоящего изобретения со ссылками на прилагаемые чертежи. На фиг.1 показана базовая конфигурация транспортирующего устройства с транспортной тележкой с фрикционным приводом со свободно поднимающимся и опускающимся столом, несущим транспортируемые объекты. Ссылочной позицией 1 обозначена транспортная тележка, удлиненная в направлении движения и в плане выполненная прямоугольной, которая оснащена двумя комплектами передних и задних, правых и левых колесных узлов 2а-2d, и столом 3, несущим транспортируемый объект. Соответствующие колесные узлы 2а-2d имеют колеса 5, которые катятся по левой и правой направляющим 4а и 4b, уложенным вдоль маршрута транспортировки, причем на двух колесных узлах, переднем и заднем (на показанном примере - расположенных слева) установлены гасящие вибрацию ролики 6 с вертикальной осью, которые охватывают направляющую 4а справа и слева. Транспортная тележка 1 приводится в движение фрикционными приводными средствами 7, одновременно установленными в соответствующих точках маршрута транспортировки. Фрикционные приводные средства 7 хорошо известны и содержат приводное фрикционное колесо 9, которое упирается в одну фрикционную поверхность 8а из пары, состоящей из взаимно параллельных вертикальных фрикционных поверхностей 8а и 8b, образованных на транспортной тележке 1 по всей ее длине, двигатель 10 для привода во вращение фрикционного колеса 9 и реактивный ролик 11, который упирается во вторую фрикционную поверхность 8b для зажатия транспортной тележки 1 между собой и приводным фрикционным колесом 9.
Хотя для приведения в движение транспортной тележки 1 в показанном примере описано фрикционное приводное средство 7, можно использовать любой другой способ привода, например, привод, по меньшей мере, одного из колес 5 двигателем или зацепление с натянутой приводной цепью для перемещения вдоль маршрута транспортировки вместе с транспортной тележкой 1. Кроме того, в качестве вертикальных фрикционных поверхностей 8а и 8b, которые необходимы на транспортной тележке 1 при использовании фрикционных приводных средств 7, могут использоваться указанные правая и левая поверхности или могут крепиться другие элементы. Далее, в качестве транспортных тележек 1 можно использовать индивидуальные тележки или единое транспортирующее устройство, на котором с соответствующими интервалами установлены столы 3, несущие транспортируемые объекты, при этом движущийся корпус растянут по маршруту транспортировки в виде пластинчатого конвейера.
Стол 3, несущий транспортируемый объект, установлен с возможностью вертикального подъема и опускания рычажным механизмом, расположенным между столом 3 и транспортной тележкой 1. Этот рычажный механизм 12 содержит пару пантографов 13а и 13b, расположенных справа и слева, и приводной узел 14. На конкретном отрезке маршрута транспортной тележки 1, то есть на отрезке, где стол 3, несущий транспортируемые объекты, удерживается в поднятом положении, ролик 40 воздействует на приводной узел 14 рычажного механизма 12 для подъема рычажного механизма 12 и, тем самым, подъема стола 3.
На фиг.2-4 показан вариант рычажного механизма согласно настоящему изобретению. Пара пантографов 13а и 13b, расположенных справа и слева и образующих рычажный механизм 12, образованы двумя парами рычагов 15а и 15b, пересекающиеся центральные участки которых шарнирно установлены на обоих концах общей центральной опорной оси 16, проходящей поперечно в горизонтальном направлении, при этом передние концевые участки обоих рычагов 15а шарнирно установлены с возможностью свободного поворота вверх и вниз на соосных опорных осях 19, фиксирующих положение, и проходящей горизонтально в поперечном направлении и установленной на правом и левом опорных элементах 18, которые установлены на правой и левой сторонах верхней части переднего участка прямоугольной в плане рамы 17 на стороне транспортной тележки 1. Задние концевые участки обоих рычагов 15а соединены общей скользящей опорной осью 20, проходящей поперечно в горизонтальном направлении и на которой на обоих концах съемно установлены ролики 21, которые размещены в направляющих 22, позволяющих роликам перемещаться вперед и назад. Направляющие 22 установлены на нижней поверхности слева и справа на задней части стола 3. Передние участки обоих рычагов 15b, которые расположены снаружи, закреплены шарнирно так, чтобы свободно поворачиваться вверх и вниз на соосных опорных осях 24, фиксирующих положение, проходящих поперечно в горизонтальном направлении на правом и левом опорных элементах 23, установленных слева и справа на нижней поверхности переднего участка стола 3, несущего транспортируемый объект. Задние концы обоих рычагов 15b соединены общей скользящей опорной осью 25, проходящей поперечно в горизонтальном направлении и на концах которой съемно установлены ролики 26, перемещающиеся вперед и назад в направляющих 27, установленных на правой и левой стороне заднего концевого участка прямоугольной в плане рамы 17.
Приводной узел 14 рычажного механизма 12, показанный на фиг.2 и 4, состоит из ролика 31 кулачкового следящего элемента, съемно установленного на несущем элементе 29 и шпинделе 30, проходящем поперечно в горизонтальном направлении под центральным участком соединительного элемента 28, который соединяет и интегрирует пары рычагов 15a и 15b для образования пары пантографов 13а и 13b, так что оба рычага своими передними концами находятся внутри. Ролик 31 кулачкового следящего элемента выступает вниз за нижнюю поверхность транспортной тележки 1, когда стол 3 опущен вниз до упора, как показано на фиг.2.
Кроме того, в рычажном механизме 12 также имеется запирающее средство 32, которое запирает стол 3, несущий транспортируемые объекты, в поднятом положении. Запирающее средство 32 содержит правую и левую защелки 34, которые в качестве запираемой детали 33 используют общую скользящую ось 25, подвешенную между задними концевыми участками обоих рычагов 15b, которые расположены снаружи от рычагов 15а, при этом рычаги 15a и 15b каждой пары образуют пантографы 13а и 13b, расположенные слева и справа соответственно, и автоматически запираются запираемыми участками 33. Соответствующие защелки 34, как показано на фиг.3 и 4, расположены относительно ролика 31 кулачкового следящего элемента приводного узла 14 в положении, смещенном в поперечном направлении, и установлены на оси с возможностью свободного поворота вверх и вниз на соосных шпинделях 36, проходящих поперечно в горизонтальном направлении, установленных на левом и правом опорных элементах 35, снабженных усиливающим элементом 17а, проходящим поперечно в горизонтальном направлении в среднем положении в продольном направлении прямоугольной рамы 17 на боковой стороне транспортной тележки 1. Защелки 34 под воздействием силы тяжести удерживаются в опущенном положении, где упоры 37, выполненные как дополнения к соответствующим защелкам 34, захвачены опорными элементами 35. Кроме того, на соответствующей защелке 34 интегрально выполнены рычажные участки 34а, направленные вниз, и на нижних концах рычажных участков 34а съемно установлены ролики 39 кулачковых следящих элементов, закрепленные на соосных шпинделях 38, проходящих поперечно в горизонтальном направлении. Ролики 39 кулачкового следящего элемента выступают вниз дальше, чем нижняя поверхность транспортной тележки 1.
Стол 3, несущий транспортируемые объекты, обычно находится неподвижно в предельном опущенном положении, показанном на фиг.2. В это время предельное опущенное положение стола 3 определяется инструментом, регулирующим высоту (который хорошо известен и не показан), установленным в стоячем положении на стороне транспортной тележки 1. Если стол 3 расположен в предельном опущенном положении, то правый и левый пантографы 13а и 13b рычажного механизма 12 находятся в сложенном положении, как показано на фиг.2, а ролик 31 кулачкового следящего элемента приводного узла 14 выступает из нижней поверхности транспортной тележки на максимальную глубину.
Следовательно, если движущаяся транспортная тележка 1 заходит на конкретный участок, на котором стол 3, несущий транспортируемые объекты, удерживается в поднятом положении, то ролик 31 кулачкового следящего элемента приводного узла 14 постепенно поднимается по криволинейной направляющей 40, как показано на фиг.5, и криволинейная направляющая 40 выталкивает вверх внутренние рычаги 15а пары пантографов 13а и 13b посредством ролика 31 кулачкового следящего элемента приводного узла 14 и соединительного элемента 28. Соответственно, правый и левый пантографы 13а и 13b совместно выполняют движение подъема, так что стол 3, поддерживаемый пантографами 13а и 13b, поднимается, при этом сохраняя горизонтальную ориентацию. В это время верхняя и нижняя общие скользящие опорные оси 20 и 25 правого и левого пантографов 13а и 13b скользят горизонтально на роликах 21 и 26 по скользящим направляющим 22 и 27, хотя нижняя общая скользящая опорная ось 25 (запираемые участки 33) при движении выталкивает вверх правую и левую защелки 34 через наклонные поверхности, выполненные на нижней части их передних концов, непосредственно перед тем, как стол 3 достигнет поднятого положения; и когда стол 3 достигает поднятого положения, то есть когда ролик 31 кулачкового следящего элемента приводного узла 14 достигает наивысшей плоской поверхности криволинейной направляющей 40, вогнутые запирающие участки 34b правой и левой защелок 34 принимают и запирают нижнюю общую скользящую опорную ось 25 (запираемые участки 33) под воздействием силы тяжести. Разумеется, дополнительно можно использовать пружины, которые принудительно перемещают соответствующие защелки 34 вниз.
Как описано выше, если транспортная тележка 1 входит на конкретный участок, то стол 3, несущий транспортируемые объекты, который располагался в предельном нижнем положении, поднимается в поднятое положение под воздействием криволинейной направляющей 40 и рычажного механизма 12. В это время защелки 34 запирающего средства 32 автоматически запирают запираемые участки 33 (нижнюю общую скользящую опорную ось 25) рычажного механизма 12 так, чтобы предотвратить падение поднятых пантографов 13а и 13b. То есть вогнутые запирающие участки 34b обеих защелок 34, в которых расположена общая скользящая опорная ось 25 (запираемые участки 33) пантографов 13а и 13b, предотвращают скольжение в обратном направлении этой общей скользящей опорной оси 25 (запираемых участков 33) при поднятом положении пантографов 13а и 13b, когда стол 3, несущий транспортируемые объекты, опускается. Следовательно, даже если приводной узел 14 (ролик 31 кулачкового следящего элемента) по какой-либо причине будет сломан, когда транспортная тележка 1 движется по заданному участку, на котором стол 3 удерживается в поднятом положении, и, следовательно, будет потерян упор, создаваемый криволинейной направляющей 40 на пантографы 13а и 13b, другими словами, даже если между начальным и конечным положениями заданного участка будет отсутствовать криволинейная направляющая 40, стол 3, несущий транспортируемые объекты, будет надежно удерживаться в поднятом положении.
На конечной части заданного участка, на котором стол 3 удерживается в поднятом положении, на транспортном маршруте сбоку от транспортной тележки 1 установлены отпирающие кулачки 41, как показано на фиг.6. Отпирающие кулачки 41 расположены справа и слева от криволинейной направляющей 40 в соответствии с расположением защелок 34 так, чтобы по ним проходили ролики 39 кулачковых следящих элементов защелок 34 при движении транспортной тележки 1, при этом длина и положение задаются такими, чтобы ролики 39 кулачковых следящих элементов двигались по отпирающим кулачкам 41 так, чтобы повернуть защелки 34 вверх, противодействуя силе тяжести, при этом вогнутые запирающие участки 34b защелок 34 отходят вверх от общей скользящей опорной оси 25 (запирающих участков 33) на стороне рычажного механизма 12, и затем ролик 31 кулачкового следящего элемента, являющийся приводным узлом 14 рычажного механизма 12, опускается по концевому спускающемуся участку криволинейной направляющей 40, пантографы 13а и 13b складываются, а общая скользящая опорная ось 25 (запираемые участки 33) уходит назад от положения, находящегося непосредственно под вогнутыми участками 34b защелок 34. Следовательно, на конечной части заданного участка, после того как запирающий эффект запирающего средства 32 при поднятом положении стола 3 автоматически прекращается, стол 3, несущий транспортируемые объекты, опускается в нижнее предельное положение под влиянием криволинейной направляющей 40 и рычажного механизма 12.
Высота поднятого положения стола 3 на заданном участке определяется высотой осевой нагрузки приводного узла 14 (ролика 31 кулачкового следящего элемента) под воздействием криволинейной направляющей 40, то есть высотой криволинейной направляющей 40. Однако, как показано на фиг.7, если на заданном участке транспортного маршрута тележки 1 совместно уложены высокая криволинейная направляющая 40Н, которая должна поднять стол 3 на высоту Н, и низкая криволинейная направляющая 40L, которая должна поднять стол 3 на высоту L, то достаточно наличия вогнутых запирающих участков 34b, которые соответствуют положению общей скользящей опорной оси 25 (запираемых участков 33), когда пантографы 13а и 13b вытолкнуты криволинейной направляющей 40Н, и вогнутых запирающих участков 34с, которые соответствуют положению общей скользящей опорной оси 25 (запираемых участков 33), когда пантографы 13а и 13b вытолкнуты криволинейной направляющей 40L, при этом вогнутые участки 34b и 34с расположены вблизи друг друга в продольном направлении тележки 1.
В соответствии с такой конфигурацией, когда стол 3, несущий транспортируемые объекты, поднят криволинейной направляющей 40Н на большую высоту Н, общая скользящая опорная ось 25 (запираемые участки 33) пантографов 13а и 13b запирается вогнутыми участками 34b, расположенными на стороне, расположенной ближе к шпинделям 36 защелок 34, а когда стол 3 поднят криволинейной направляющей 40L на малую высоту L, общая скользящая опорная ось 25 (запираемые участки 33) пантографов 13а и 13b запирается вогнутыми участками 34с, расположенными на стороне, удаленной от шпинделей 36 защелок 34. Кроме того, в обоих случаях, когда на конкретном участке имеется криволинейная направляющая 40Н и криволинейная направляющая 40L, отпирающий кулачок 41 размещается на конечной части конкретного участка, как показано на фиг.8. Отпирающий кулачок 41 имеет высоту, обеспечивающую срабатывание роликов 39 кулачкового следящего элемента защелок 34 для выталкивания защелок 34 на такую высоту, когда оба вогнутых запирающих участка 34b и 34с уходят вверх с пути скольжения общей скользящей опорной оси 25 (запираемый участков 33), и длина этих кулачков 41 такова, чтобы удерживать защелки 34 вытолкнутыми вверх, пока общая скользящая опорная ось 25 (запираемые участки 33) не уйдет назад за пределы вогнутых запирающих участков 34b и 34с, и может оставить замок открытым при поднятом положении пантографов 13а и 13b, пока стол 3 не начнет опускаться.
В вышеописанном варианте передний и задний вогнутые запирающие участки 34b и 34с выполнены на каждой защелке 34. Однако можно отдельно выполнить защелку с одним только вогнутым участком 34b для запирания пантографов 13а и 13b в поднятом положении, когда стол 3 поднят криволинейной направляющей 40Н на высоту Н, и другую защелку с одним только вогнутым участком 34с для запирания пантографов 13а и 13b в поднятом положении, когда стол 3 поднят криволинейной направляющей 40L на высоту L. В этом случае необходимо структурировать отпирающий кулачок 41, который выталкивает вверх, по меньшей мере, одну защелку с вогнутым запирающим участком 34b для одновременного выталкивания другой защелки с вогнутым запирающим участком 34с, чтобы общая скользящая опорная ось 25 (запираемый участок 33), которая движется назад от их положения вогнутого запирающего участка 34b, не зацепилась вновь с вогнутым запирающим участком 34с другой защелки.
Кроме того, в этом варианте, ролик 31 кулачкового следящего элемента, как приводной узел 14 рычажного механизма 12, образованного рычагами 15а и 15b, образующими пантографы 13а и 13b, установлен в положении вблизи опорных осей 19, фиксирующих положение, рычагов 15а, расположенных на боковой стороне транспортной тележки 1. Однако, как показано на фиг.1А, приводной узел 14 может быть образован поднимающим/опускающим штоком 42, установленным на транспортной тележке 1 с возможностью вертикального подъема и опускания. В этом случае на нижнем конце поднимающего/опускающего штока 42 установлен ролик кулачкового следящего элемента для взаимодействия с криволинейной направляющей 40, а на верхнем конце поднимающего/опускающего штока 42 установлен упорный стол, для создания осевой нагрузки на ролик, установленный на оси на рычагах 15а. Соответственно, благодаря направленной вверх осевой нагрузке, создаваемой криволинейной направляющей 40 на поднимающий/опускающий шток 42, шток 42 заставляет пантографы 13а и 13b подниматься посредством упорного стола, установленного на его верхнем конце, и ролика на стороне рычагов 15а. Упорным положением на стороне пантографа для поднимающего/опускающего штока 42 может быть положение общей центральной опорной оси 16, на которой с возможностью поворота установлены рычаги 15а и 15b. Если приводной узел 14 образован с применением такого поднимающего/опускающего штока 42, то использование запирающего средства 32 согласно настоящему изобретению становится особенно эффективным, поскольку имеется высокая вероятность его поломки из-за изгиба при транспортировке тяжелых объектов.
Кроме того, в качестве запираемых участков 33 на стороне пантографов 13а и 13b, с которыми сцепляются запирающие защелки 34, используется общая скользящая опорная ось 25 пантографов 13а и 13b на стороне транспортной тележки 1; однако, если такая общая скользящая опорная ось 25 в конструкции отсутствует, можно применить элемент, образующий запираемые участки 33, с которыми зацепляются защелки 34, и который расположен вблизи скользящей опорной оси 25, как выступ на рычагах 15b.
Транспортирующее устройство с поднимающимся/опускающимся столом для транспортировки объектов согласно настоящему изобретению может быть использовано на автомобильном сборочном конвейере в качестве транспортного устройства для перемещения кузова автомобиля (транспортируемого объекта), на который крепятся различные узлы, с удержанием кузова (стола) при различных сборочных операциях (конкретный участок описан для варианта, где проложена криволинейная направляющая 40) на такой высоте, на которой можно удобно проводить операцию сборки.






Изобретение относится к транспортирующему устройству для выборочного перемещения стола, несущего транспортируемые объекты и установленного на транспортной тележке в поднятое положение посредством выталкивания вверх стола криволинейными направляющими, расположенными на заданном участке маршрута транспортировки. В транспортирующем устройстве на рычажном механизме с боковой стороны транспортной тележки установлен запираемый участок, совершающий возвратно-поступательные перемещения в соответствии с движением подъема/опускания рычажного механизма. При этом запирающая защелка автоматически запирает запирающий участок, когда стол, несущий транспортируемый объект, поднят в заданное положение. Устройство содержит отпирающий кулачок, который переводит запирающую защелку в разомкнутое положение в результате движения транспортной тележки. Технический результат направлен на предотвращение падения рычажного механизма, т.е. опускания стола, несущего транспортируемый объект в поднятом положении. 5 з.п. ф-лы, 8 ил.
| JP 4016498 A, 21.01.1992 | |||
| JP 7172538 A, 11.07.1995 | |||
| JP 8020495 A, 23.01.1996 | |||
| Подъемник | 1988 |
|
SU1586994A1 |

