Изобретение относится к подъемно- транспортным устройствам, а именно к подъемникам-снижателям, предназначенным для работы в составе, вертикально-замкнутых конвейерных линий для изготовления строительных изделий
Цель изобретения - повышение надежности и сни7ке ше гoщнocти привода.
На фиг. 1 показан подтэемник в сложенном состоянии, общий вид; на фиг.2 - то же в поднятом состоянии; на фиг.З - вид А на фиг,1; на фиг„4 соединенной с кронштейном 16. Для взаимодействия с Z-образным рычагом 18 на рычаге 20 выполнен упор 22. На кронштейне 16 смонтирован упор 23, на который оперт Г-образный рычаг 20.
Ведущая звездочка 10 и цевки 13 выполнены с сопряженным профилем. Зубья звездочки 10 имеет уклон, об- ратньй направлению вращения колес п опускании звена 1.
В исходном положении подъемника (звено 1 опущено) угол об между осью
10
схема взаимодействия ведущей звездоч- jj звездочки 10, осью цевки 13 и осью
шарнира 6 больше или равен 90 для обеспечения надежности зацепления
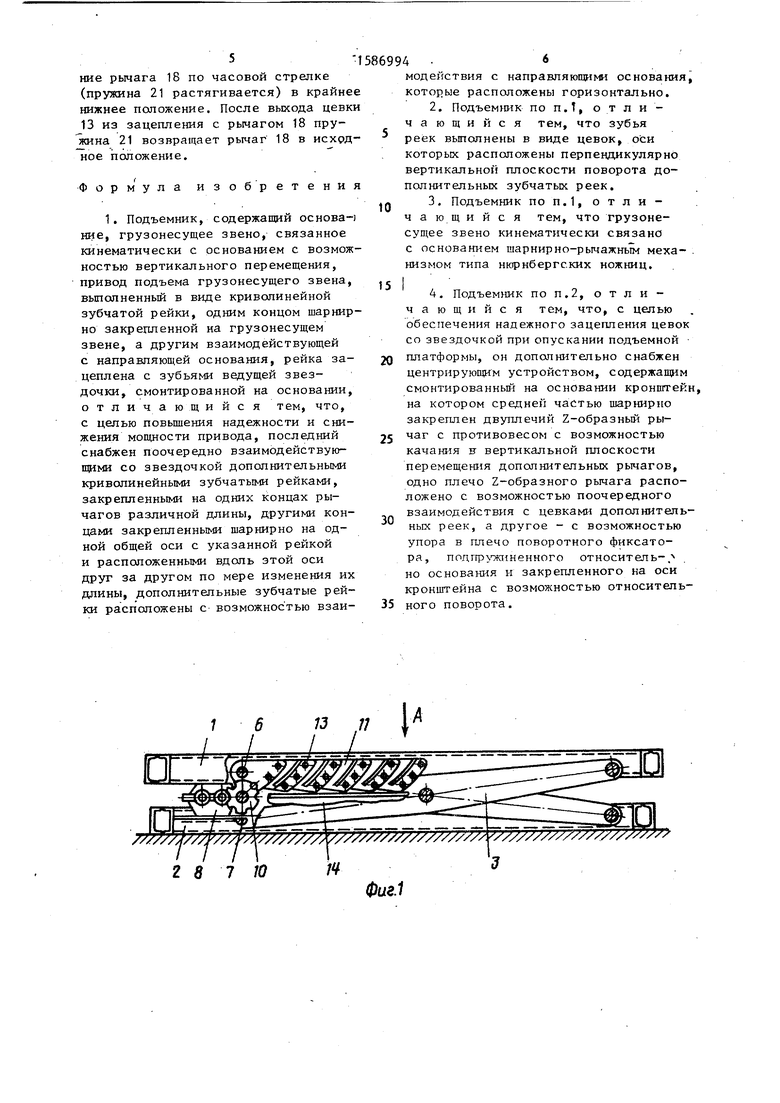
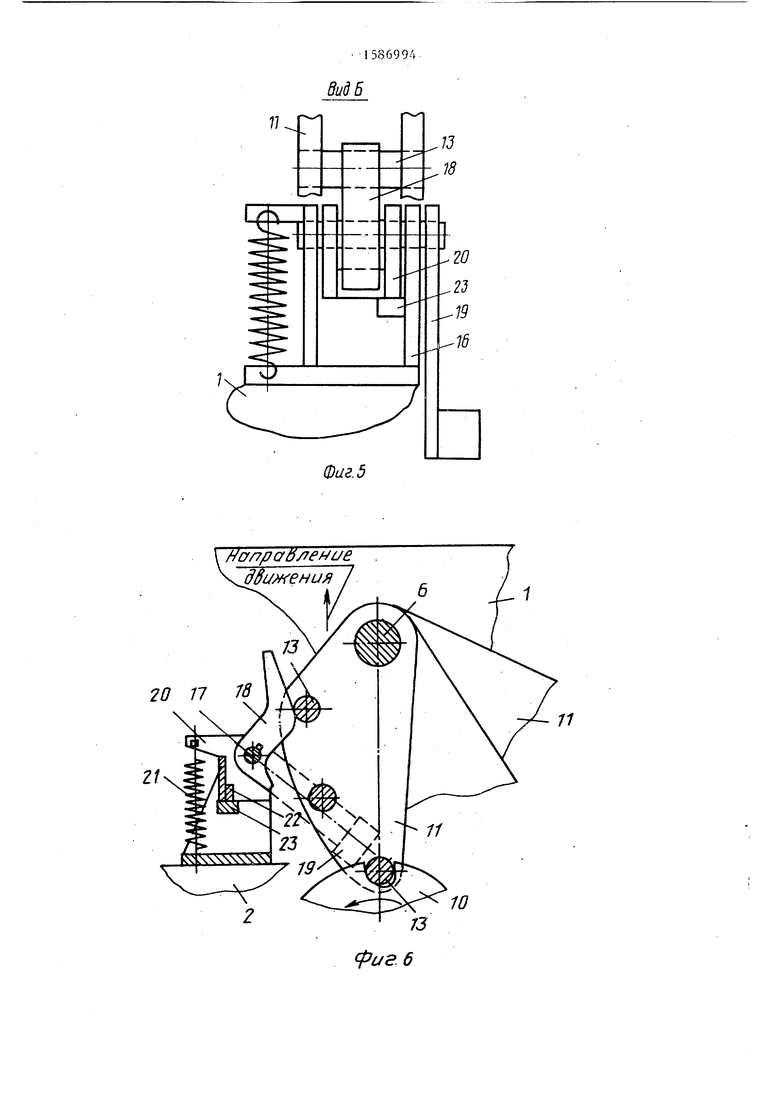
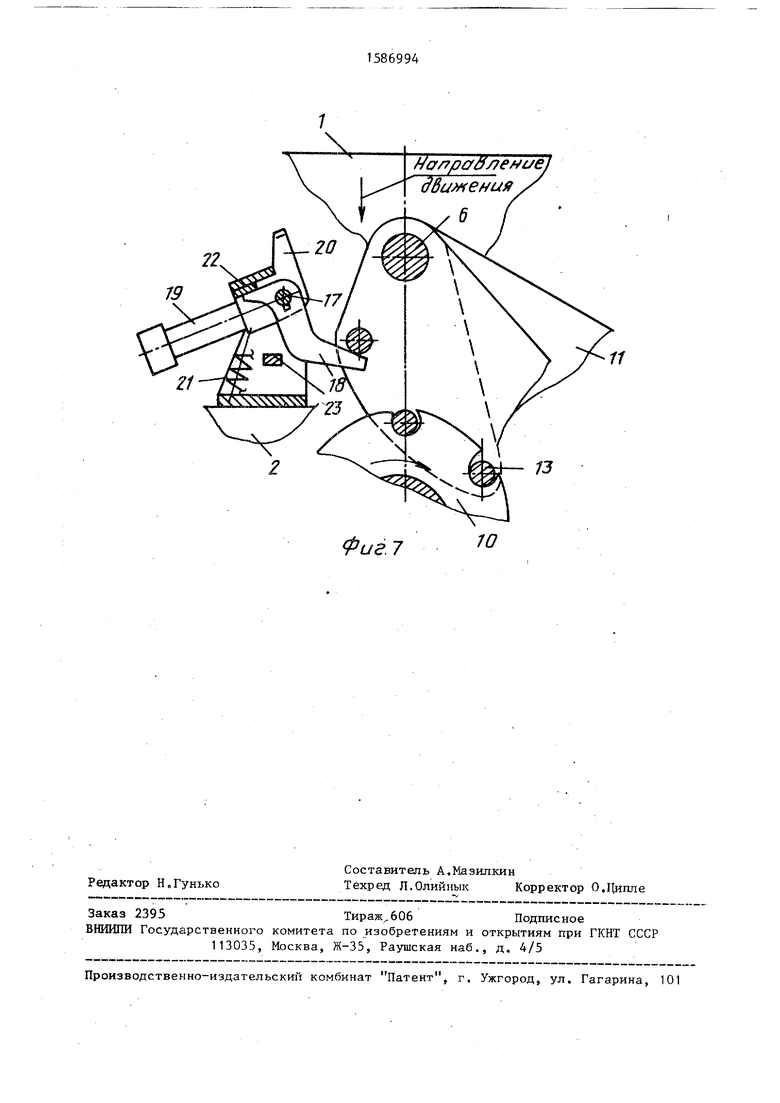
ки с зубчатыми рейками и с центриру-- ющим устройством в конечный момент опускания подвижной платформы; на фиг.5 - вид Б на фиг.Д; на фиг.6 - схема взаимодействия цевок с центрирующим устройством при подъеме подвижной платформы; на фиг.7 - то же, при опускании подвижной платформы.
Подъемник состоит из грузонесуще- го звена 1 и основания 2, которые кинематически связаны между собой двумя парами рычагов 3 типа нюрнбергские ножницы, одни концы которых закреплены в направляющих 4 и 5, а другие связаны шарнирами 6 и 7 соответственно с. грузонесуш51м звеном 1 и основанием 2.
На основании 2 установлен привод 8 подъема, выполненный в виде криволинейной зубчатой рейки и на котором на оси 9 смонтирована ведущая звездочка 10.
На осях шарниров 6 грузонесущего звена 1 шарнирно закреплены дополнительные криволинейные зубча-тые рейки 11, выполненные в виде секторов, закрепленных на одних концах рычагов различной длины. На образующих 12 секторов смонтированы цевки 13, оси которых распапожены перпендикулярно вертикальной :гц1оскости поворота дополнительных зубчатых реек 11. На основании 2 смонтированы направляющие 14, взаимодействуюв1ие с секторами.
На основании 2 установлены центрирующие устройства 15j выполненные в виде кронштейнов 16 с осями 1 7. На каждой оси 17 жестко закреплен Z-об- разньй рычаг 18 и противовес 19. На оси 17 шарнирно закреплен поворотный фиксатор, выполненный в виде Г-образ- ного рычага 20. Один конец Г-образно- го рычага 20 связан с пружиной 21,
й
соединенной с кронштейном 16. Для взаимодействия с Z-образным рычагом 18 на рычаге 20 выполнен упор 22. На кронштейне 16 смонтирован упор 23, на который оперт Г-образный рычаг 20.
Ведущая звездочка 10 и цевки 13 выполнены с сопряженным профилем. Зубья звездочки 10 имеет уклон, об- ратньй направлению вращения колес при опускании звена 1.
В исходном положении подъемника (звено 1 опущено) угол об между осью
10
звездочки 10, осью цевки 13 и осью
шарнира 6 больше или равен 90 для обеспечения надежности зацепления
зубчатого колеса 10 с зубчатыми
I
рейками 11.
Подъб .мник работает следующим образом.
При включении привода 8 подъема за счет взаимодействия цевок 13 с ведущей звездочкой 10 и передачи усилия от них через дополнительные зубчатые рейки 11 и ось 6 происходит раздвижка шарнирно-рычажной системы типа нюрнбергские ножницы. При подъе-i ме звена 1 очередная цевка 13 рейки 11 заходит в зацепление с ведущей звездочкой 10. При этом последующие рейки 11 посредством секторов перемещаются по направляющим 14.
Во время подъема звена 1 цевки 13 отклоняют Z-образный рычаг 18 с про- тивовесом 19, который при выходе из зацепления с цевкой 13 возвращается в исходное положение под действием противовеса 19.
Опускание подвижной платформы 1 происходит аналогично, но при этом работает центрирующее устройство 15, которое обеспечивает взаимодействие каждой крайней цевки 13 с-зубом звездочки 10, находящимся в верхней точке. В исход-ном положении кронштейн 16 под действием, пружины 21 опирается на упор 23, а Z-образньй рычаг 18 упирается в кронштейн 16. При работе привода 8 на опускание подвижной платформы 1 за счет наклонной поверхности Z-образного рычага 18 каждая последующая рейка 11 устанавливается в рабочее положение путем ее отклонения на оси шарнира 6. При этом пружина 21 обеспечивает положение рычага 18 в исходном положении. При опускании подвижной платформы 1 происходит отклоне-
ние рычага 18 по часовой стрелке (пружина 21 растягивается) в крайнее нижнее положение. После выхода цевки 13 из зацепления с рычагом 18 пру- на 21 возвращает рьгчаг 18 в исхрд- ное положение.
Формула изобретения
1. Подъемник, содержащий основание, грузонесущее звено, связанное кинематически с основанием с возможностью вертикального перемещения, привод подъема грузонесущего звена, выполненный в виде криволинейной зубчатой рейки, одним концом шарнир но закрепленной на грузонесущем звене, а другим взаимодействующей с направляющей основания, рейка зацеплена с зубьями ведущей звездочки, смонтированной на основании, отличающийся тем, что, с целью повьшения надежности и снижения мощности привода, последний снабжен поочередно взаимодействующими со звездочкой дополнительными криволинейными зубчатыми рейками, закрепленными на одних концах рычагов различной длины, другими концами закрепленными шарнирно на одной общей оси с указанной рейкой и расположенными вдоль этой оси друг за другом по мере изменения их длины, дополнительные зубчатые рейки расположены с возможностью взаи
86994 .
модействия с направляющими основания, которые расположены горизонтально.
2.Подъемтгк по п. Т, отличающийся тем, что зубья реек выполнены в виде цевок, оси которых расположены перпендикулярно вертикальной плоскости поворота дополнительных зубчатых реек,
3.Подъемник по п.1, о т л и - чающийся тем, что грузонесущее звено кинематически связано
с основанием шарнирно-рычажнь1м меха- . низмом типа нюрнбергских ножниц.
10
4. Подъемник по п.2, отличающийся тем, что, с целью обеспечения надежного зацепления цевок со звездочкой при опускании подъемной платформы, он дополнительно снабжен центрирующим устройством, содержащим смонтированньш на основании кронпггейн, на котором средней частью шарнирно закреплен двуплечий Z-образный рычаг с противовесом с возможностью качания н вертикальной плоскости перемещения дополнительных рычагов, одно плечо Z-образного рычага расположено с возможностью поочередного взаимодействия с цевками дополнительных реек, а другое - с возможностью упора в плечо поворотного фиксатора, подгфугжиненного от носит ел ь-, но основания и закрепленного на оси кронштейна с возможностью относительного поворота.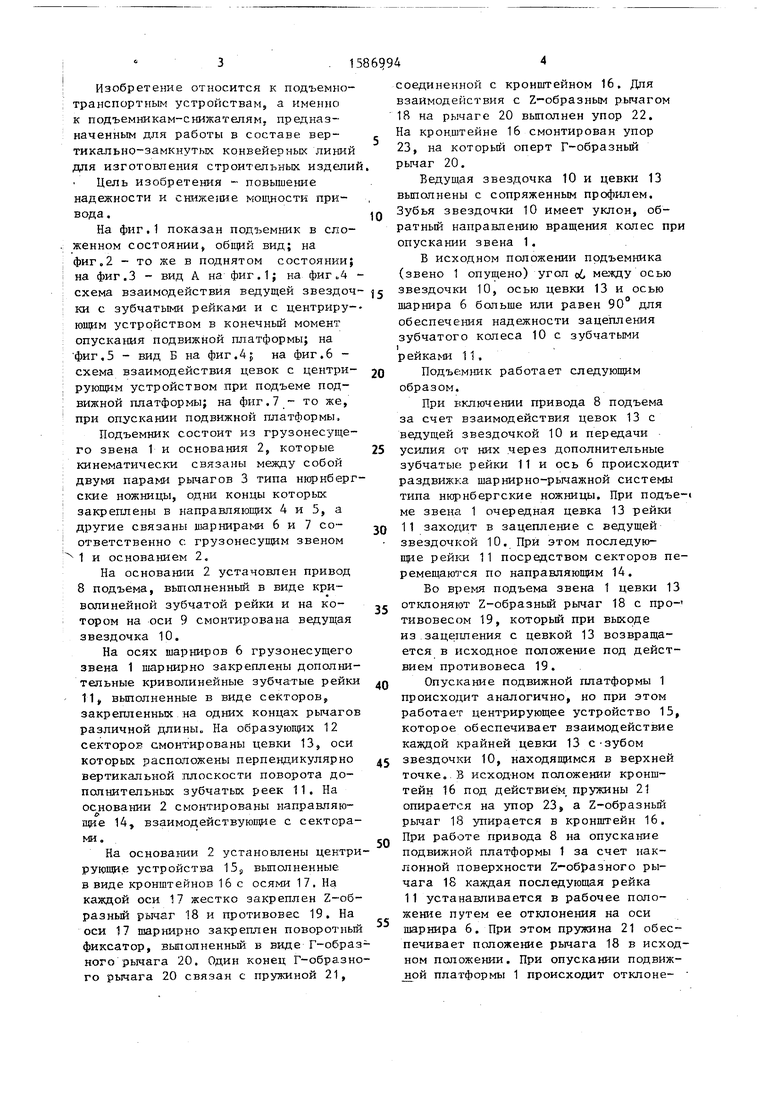
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
| УСТРОЙСТВО ДЛЯ ОСТАНОВКИ КАРЕТКИ, ВЗАИМОДЕЙСТВУЮЩЕЙ С ТЯГОВОЙ ЦЕПЬЮ | 1998 |
|
RU2137691C1 |
| Подъемник | 1990 |
|
SU1792890A1 |
| Подъемник | 1988 |
|
SU1519998A1 |
| ПОДЪЕМНИК | 2003 |
|
RU2263624C2 |
| Кран-штабелер | 1987 |
|
SU1504177A1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2009 |
|
RU2407695C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2361807C1 |
| Шахтный локомотив | 1980 |
|
SU1022844A1 |
| МЕХАНИЗМ ИЗМЕНЕНИЯ ФОРМЫ СТРОЧКИ ШВЕЙНОЙ МАШИНЫ "ЗИГЗАГ" | 1990 |
|
RU2023086C1 |

Изобретение относится к подъемно-транспортным устройствам, предназначенным для работы в составе вертикально-замкнутых конвейерных линий. Цель изобретения - повышение надежности и снижение мощности привода. Подъемник включает грузонесущее звено 1, шарнирно связанное с основанием 2 двумя парами рычагов 3, образующих шарнирно-рычажный механизм типа "нюрнбергские ножницы". На основании 2 смонтирован привод 8 с ведущей звездочкой 10. На оси шарнира 6 шарнирно закреплены рычаги различной длины с секторами на концах, образующие вместе с цевками 13 дополнительные криволинейные зубчатые рейки 11, поочередно зацепляемые со звездочкой 10. На основании 2 закреплены направляющие 14 для взаимодействия с образующими секторов. Подъемник снабжен центрирующим устройством 15, содержащим смонтированный на основании кронштейн, на котором средней частью шарнирно закреплен двуплечий Z-образный рычаг с противовесом с возможностью качания в вертикальной плоскости. Одно плечо этого рычага расположено с возможностью поочереднего взаимодействия с цевками 13 реек 11, а другое - с возможностью упора в плечо поворотного фиксатора, подпружиненного относительно основания и закрепленного на оси кронштейна с возможностью относительного поворота. 3 з.п. ф-лы, 7 ил.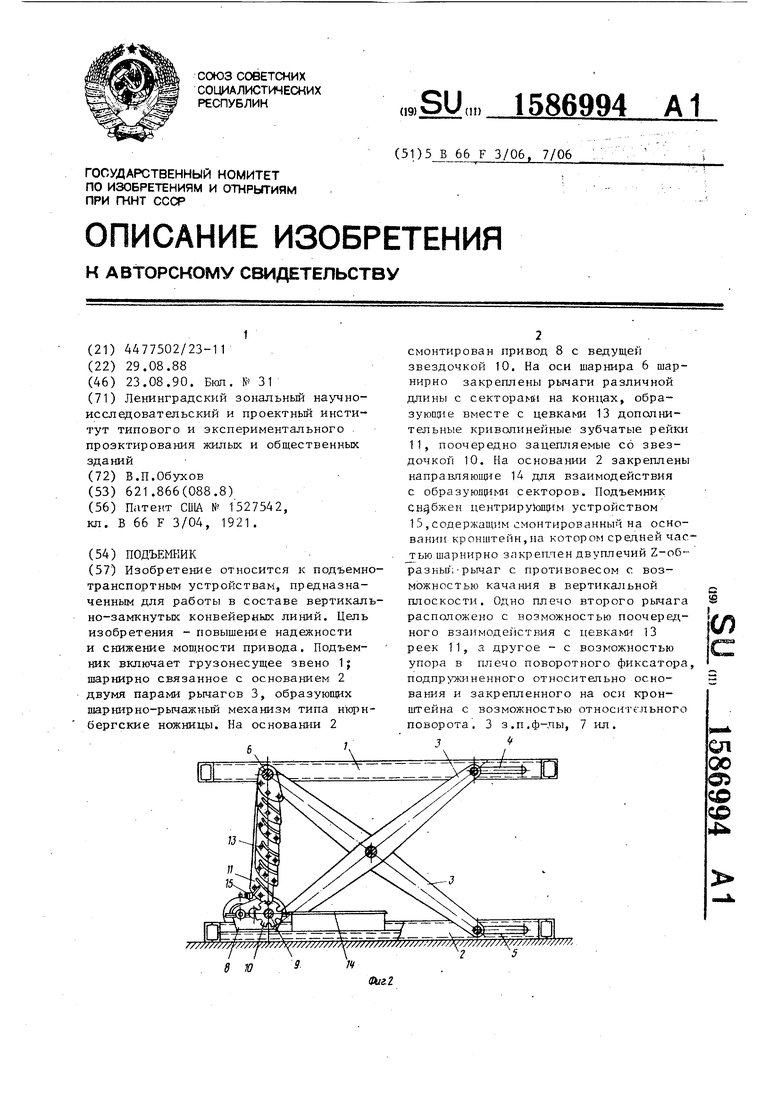
2 8 7 iO/V
Фиг.1
физ-З
HanpaBjiemts ддижвния
xLb
Фаг. 5
20 17 78
10
(риг.б
Фиё.7
| Устройство для исследования взаимодействия оснований и фундаментов | 1988 |
|
SU1527542A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
