Изобретение относится к военной технике, в частности к средствам ведения боя, охраны и обороны границы, борьбы с террористами. Разработана конструкция оружия для установки на мобильной установке с целью дистанционного управления стрельбой при штурме бетонированных или бронированных сооружений.
Известны реактивные снаряды по патенту РФ №2272984, содержащие корпус, взрывное устройство и двигатель, работающий на твердом топливе.
Недостатком снаряда является низкая эффективность твердотопливных двигателей.
Известны реактивные снаряды, которые содержат осесимметричный корпус, взрывное устройство, емкость с твердым топливом и реактивный двигатель, работающий на твердом топливе, систему управления и аэродинамические рули, закрепленные на корпусе снаружи, см. сайт Интернет http://rbase.new-factoria.ru. Приложение 1, прототип.
Недостатки: ограниченная дальность полета, низкая точность попадания, большое аэродинамическое сопротивление аэродинамических рулей и большие габариты и вес снаряда при относительно малом взрывном устройстве, низкая скорость полета снаряда, обусловленные применением твердого топлива, имеющего более низкие энергетические свойства по сравнению с жидким топливом.
Задача создания изобретения - повышение скорости полета снаряда, точности и дальности стрельбы, уменьшение веса и габаритов снаряда при определенной мощности взрывного устройства и дальности полета снаряда.
Решение указанной задачи достигнуто в биротативном реактивном снаряде, включающем органы управления курсом движения снаряда по углам тангажа, рыскания и крена, корпус осесимметричной формы, выполненный из вращающейся и невращающейся частей, внутри которого установлено взрывное устройство, приборы системы управления, приводы органов управления курсом движения снаряда по углам тангажа, рыскания и крена, бак с топливом, биротативный газотурбинный двигатель с реактивным соплом, работающий на жидком топливе и содержащий воздухозаборник, компрессор, камеру сгорания и турбину, образующие внутренний и внешний роторы, разделенные подшипниковыми опорами, при этом ротор компрессора и рабочее колесо турбины образуют внутренний ротор, а воздухозаборник, статор компрессора и камера сгорания образуют внешний ротор, который жестко соединен с вращающейся частью корпуса, бак с топливом соединен топливопроводом, в котором установлен топливный насос с приводом насоса, с камерой сгорания, а реактивное сопло выполнено как невращающаяся часть снаряда и установлено на подшипниковых опорах между внутренним и внешним роторами, при этом органы управления курсом выполнены в виде четырех поворотных аэродинамических рулей, установленных на внешней поверхности невращающейся части корпуса, а приборы системы управления установлены в приборном контейнере, соединенном с невращающейся частью снаряда. Снаряд может быть снабжен контроллером двигателя и бортовым компьютером, при этом привод насоса соединен с контроллером двигателя, который соединен с бортовым компьютером. Снаряд может быть снабжен подключенными к бортовому компьютеру приемно-передающим устройством с антенной и приемником системы глобального позиционирования, при этом приемник системы глобального позиционирования подключен к антенне. Снаряд может быть снабжен подключенным к бортовому компьютеру контроллером взрывателя, при этом взрывное устройство также подключено к бортовому компьютеру.
Проведенные патентные исследования показали, что предложенное техническое решение обладает новизной, изобретательским уровнем и промышленной применимостью.
Сущность изобретения поясняется на фиг.1...11, где:
на фиг.1 приведена принципиальная схема простейшего варианта снаряда,
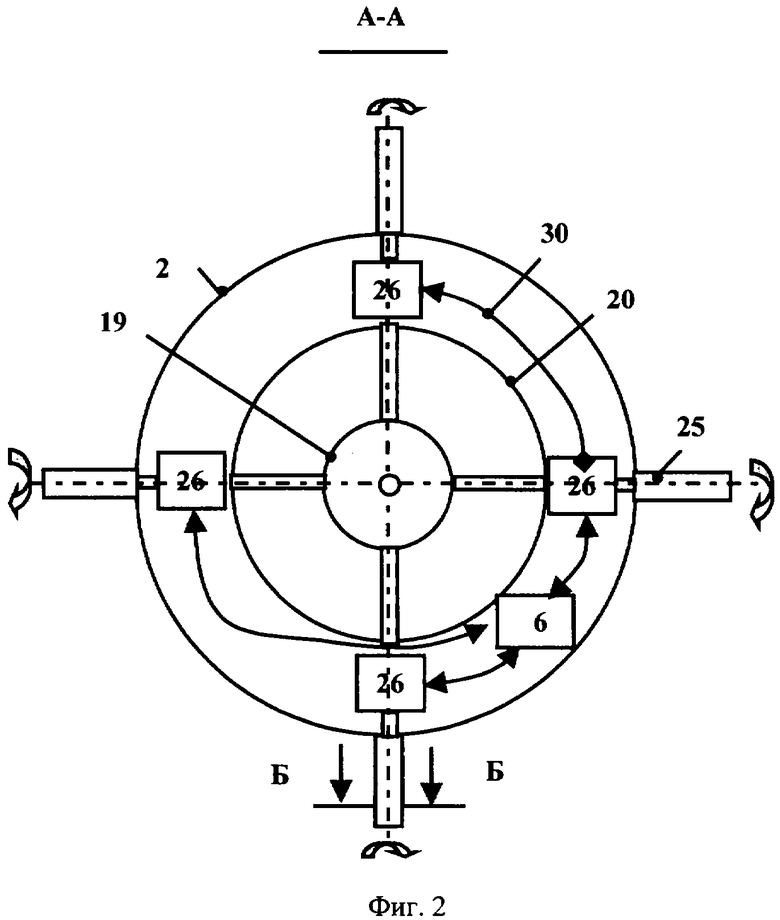
на фиг.2 приведен разрез по А-А,
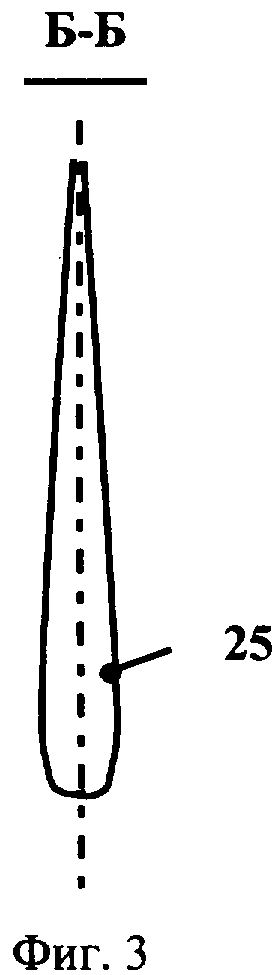
на фиг.3 приведен разрез Б-Б,
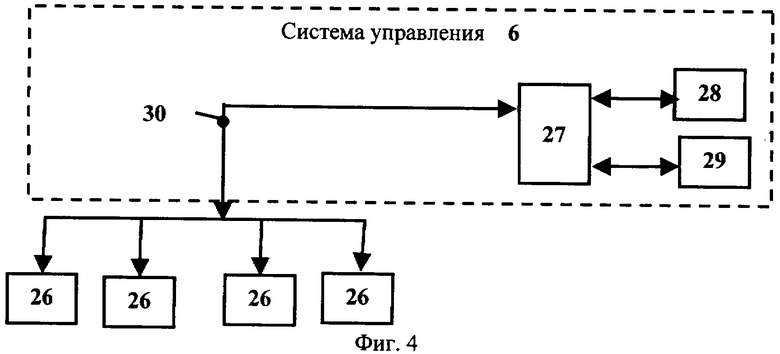
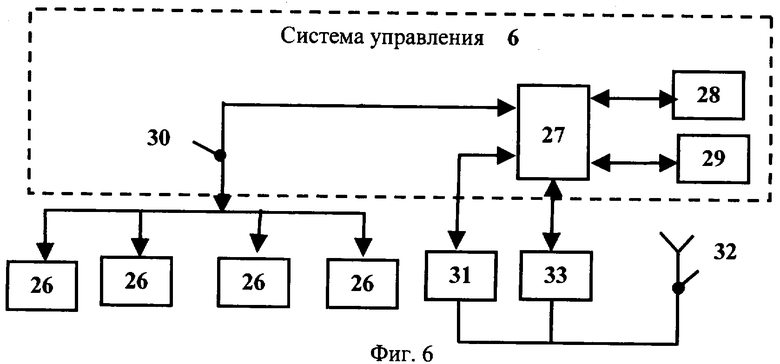
на фиг.4...6 приведены схемы системы управления,
на фиг.7 приведена схема снаряда с системой глобального позиционирования,
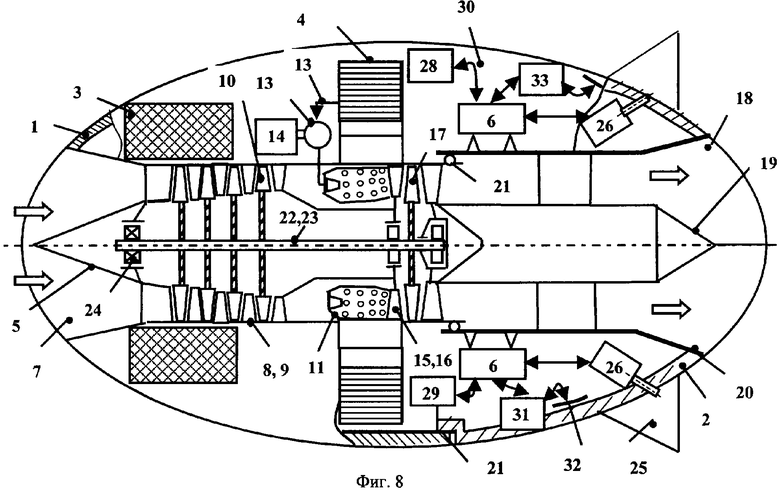
на фиг.8 приведена схема с контролируемым подрывом взрывного устройства,
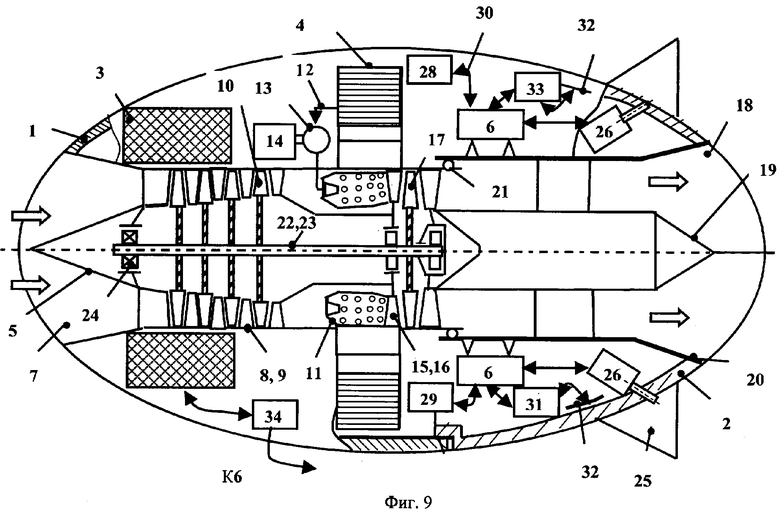
на фиг.9 приведена схема снаряда с системой глобального позиционирования,
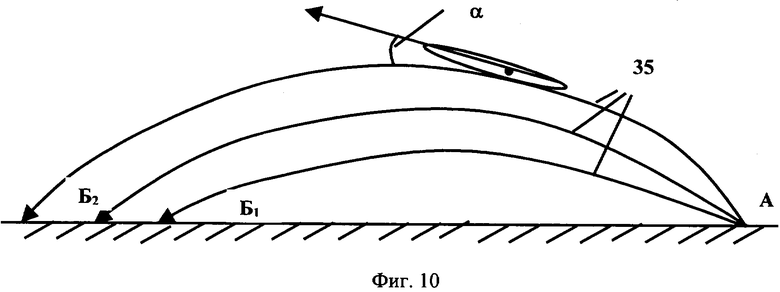
на фиг.10 приведена схема управления по углу тангажа,
на фиг.11 приведена схема управления по углу рыскания.
Снаряд (фиг.1) содержит осесимметричный корпус, состоящий из двух частей: вращающейся части корпуса 1 и невращающейся части корпуса 2. Внутри вращающейся части корпуса 1 установлены взрывное устройство 3 и топливный бак 4. Предпочтительно взрывное устройство 3 и топливный бак 4 выполнить тороидальной формы для динамической балансировки снаряда в процессе вращения при полете и по мере расходования топлива.
Также внутри вращающейся части корпуса 1 установлен газотурбинный двигатель 5, работающий на жидком топливе. Снаряд имеет систему управления 6, установленную внутри невращающейся части корпуса 2, что позволяет избежать больших нагрузок центробежных сил на приборы и датчики.
Газотурбинный двигатель 5 состоит из воздухозаборника 7, компрессора 8, состоящего в свою очередь из статора компрессора 9 и внутреннего ротора 10, камеры сгорания 11, к которой подключен топливопровод 12 с топливным насосом 13, имеющим привод насоса 14. За камерой сгорания 11 установлена турбина 15, содержащая сопловой аппарат 16 и рабочее колесо турбины 17. На выходе турбины 15 установлено реактивное сопло 18. Реактивное сопло 18 содержит внутреннюю часть реактивного сопла 19 и внешнюю часть реактивного сопла 20. Реактивное сопло 18 выполнено отдельно от газотурбинного двигателя 5 и установлено относительно вращающейся части двигателя 5 на опорах сопла 21, например подшипниках качения или скольжения, с возможностью поворота относительно них. При этом в полете реактивное сопло 18 не вращается, а все остальные узлы газотурбинного двигателя 5 и вращающаяся часть корпуса 1 вращаются.
На валу 22 установлены все узлы внутреннего ротора 23, а именно ротор компрессора 10 и рабочее колесо турбины 17. Все остальные узлы газотурбинного двигателя 5 образуют внешний ротор, в который входят сверхзвуковой воздухозаборник 7, статор компрессора 9 и камера сгорания 11.
Система управления 6 находится в контейнере, закрепленном в реактивном сопле 18, т.е. не вращается в полете, что уменьшает нагрузку на датчики и приборы системы управления.
Вал двигателя 22 с установленным на нем ротором компрессора 10 и ротором турбины 17 образует внутренний ротор газотурбинного двигателя 23, а статор компрессора 9, камера сгорания 11 и сопловой аппарат турбины 6 образуют внешний ротор газотурбинного двигателя, вращающийся в полете в другую сторону, т.е. газотурбинный двигатель 5 выполнен по биротативной схеме. Между этими роторами установлены опоры двигателя 24 (фиг.1).
На внешней поверхности невращающейся части корпуса 2 (фиг.1, 2 и 3) установлено четыре аэродинамических руля 25 с приводами рулей 26. Приводы рулей 26 соединены с системой управления 6 и позволяют управлять движением снаряда по углам тангажа - α, рыскания - β и крена - γ.
Внешний ротор жестко соединен с корпусом 2 и вращается в полете на опорах двигателя 24 в сторону, противоположную вращению внутреннего ротора 23, т.е. газотурбинный двигатель и весь снаряд выполнены по биротативной схеме, которая дает значительные преимущества, описанные ниже.
К топливному насосу 13 подстыкован привод насоса 14, который подсоединен к системе управления 6 (фиг.2). Система управления 6 (фиг.4...6) содержит бортовой компьютер 27, к которому подключены акселерометр 28 и магнетометр 29, для измерения углов ориентации снаряда в полете. Все связи между электронными приборами и датчиками выполнены проводными каналами связи 30.
К бортовому компьютеру 27 может быть подсоединено приемно-передающее устройство 31 (фиг.5), к которому подсоединена антенна 32. Антенна 32 имеет кольцевую форму, а участок неподвижного корпуса 2 в районе расположения антенны 32 выполнен радиопрозрачным. Внутри неподвижной части корпуса 2 может быть установлено приемное устройство системы глобального позиционирования 33 (фиг.4), которое также подключено к бортовому компьютеру 27 и к антенне 32. Все соединения выполнены проводными связями 30. В систему входят спутники 33, связанные с антенной 32 по радиоканалам.
Возможно применение схемы (фиг.9) подрыва с контроллером взрывателя 34, подключенным к бортовому компьютеру 27 и к взрывному устройству 3.
На фиг.10 и 11 приведена схема полета снаряда по траектории 35, при этом на фиг.10 приведена схема управления по углу тангажа α, а на фиг.11 - по углу рыскания - β. Управление по углам крена (вращение) γ на фиг.1...11 не приведено.
При применении снаряда в оперативную память бортового компьютера 27 вводят исходные данные полета. Снаряд стартует с пусковой установки, для этого запускают газотурбинный двигатель 5, при этом бортовой компьютер 27 подает команду на привод насоса 14 и на топливный насос 13. Топливо подается из топливного бака 4 в камеру сгорания 11, где воспламеняется при помощи электрозапальника (на фиг.1...11 не показан). Продукты сгорания приводят в действие рабочее колесо турбины 17, которое раскручивает через вал 22 внутренний ротор 23. Внешний ротор начинает вращаться в другую сторону, т.е. вращающаяся часть корпуса 1 вращается в полете, что обеспечивает стабилизацию снаряда и повышает точность стрельбы. При вращении центробежные силы прижимают топливо к внешним стенкам топливного бака и создают давление на входе в топливный насос без системы наддува. Кроме того, по мере расходования топлива не нарушается балансировка снаряда. Применение жидкого топлива, а также кислорода атмосферного воздуха позволяет получить преимущество в дальности полета по сравнению с твердотопливными реактивными снарядами, т.к. теплотворная способность жидкого топлива больше, чем у твердого в 3...4 раза, а окислитель в форме кислорода воздуха берется из атмосферы.
При полете приемник системы глобального позиционирования 33 (системы ГЛОНАС или GPS) принимает сигнал с трех спутников системы по радиоканалам и определяет собственные координаты. Используя заложенную программу посредством воздействия бортового компьютера 27 на привод насоса 14 и далее на топливный насос 13, можно уменьшить или увеличить тягу газотурбинного двигателя 5 и тем самым изменить траекторию полета снаряда от точки старта «А» до цели «Б» по дальности.
По команде с бортового компьютера 27, переданной на контроллер подрыва 34 (фиг.9), взрывное устройство 3 может быть взорвано, например, в полете.
Управление углами тангажа, рыскания и крена осуществляется согласно фиг.10 и 11 посредством поворота конического обтекателя реактивного сопла 25. Исходные данные об угловой ориентации снаряда постоянно контролируют акселерометр 28 и магнетометр 29. Магнетометр 29 определяет азимут движения снаряда, а акселерометр 28 - его отклонение от направления вектора тяжести. Размещение этих датчиков в невращающейся части корпуса 2 исключает влияние центробежных сил на показания датчиков.
Применение изобретения позволило:
- повысить скорость снаряда в 2 раза, т.к. относительная скорость вращения роторов равна сумме скоростей их вращения, уменьшить габариты устройства в 2 раза по сравнению с обычной схемой, уменьшить центробежные нагрузки на узлы и детали в 4 раза;
- повысить мощность и КПД газотурбинного двигателя при меньших габаритах, обеспечить хорошую стабилизацию снаряда в полете из-за его вращения с огромной угловой скоростью;
- уменьшить нагрузки на приборы и датчики системы управления снаряда, стабилизировать положение снаряда в полете;
- улучшить управляемость снарядом в полете.
| название | год | авторы | номер документа |
|---|---|---|---|
| СВЕРХЗВУКОВОЙ БИРОТАТИВНЫЙ РЕАКТИВНЫЙ СНАРЯД | 2007 |
|
RU2338151C1 |
| АВИАЦИОННАЯ БОМБА С БИРОТАТИВНЫМ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2007 |
|
RU2347179C1 |
| СВЕРХЗВУКОВОЙ РЕАКТИВНЫЙ СНАРЯД | 2007 |
|
RU2350893C2 |
| ДОЗВУКОВОЙ РЕАКТИВНЫЙ СНАРЯД | 2007 |
|
RU2345315C1 |
| СВЕРХЗВУКОВОЙ РЕАКТИВНЫЙ СНАРЯД | 2007 |
|
RU2348894C1 |
| СВЕРХЗВУКОВОЙ РЕАКТИВНЫЙ СНАРЯД | 2007 |
|
RU2342628C1 |
| КРЫЛАТАЯ РАКЕТА | 2007 |
|
RU2351888C1 |
| КРЫЛАТАЯ РАКЕТА | 2007 |
|
RU2352892C2 |
| АВИАЦИОННАЯ БОМБА | 2007 |
|
RU2345318C1 |
| КОМБИНИРОВАННЫЙ РЕАКТИВНЫЙ СНАРЯД | 2007 |
|
RU2348895C2 |



Изобретение относится к боевой технике и предназначено для ведения боя и борьбы с террористами. Технический результат - повышение точности стрельбы и расширение функциональных возможностей снаряда. Биротативный реактивный снаряд содержит органы управления курсом движения снаряда по углам тангажа, рыскания и крена, корпус осесимметричной формы, выполненный из вращающейся и невращающейся частей. Внутри корпуса установлено взрывное устройство, приборы системы управления, приводы органов управления курсом движения снаряда по углам тангажа, рыскания и крена, бак с топливом, биротативный газотурбинный двигатель с реактивным соплом, работающий на жидком топливе и содержащий воздухозаборник, компрессор, камеру сгорания и турбину, образующие внутренний и внешний роторы, разделенные подшипниковыми опорами. При этом ротор компрессора и рабочее колесо турбины образуют внутренний ротор, а воздухозаборник, статор компрессора и камера сгорания образуют внешний ротор, который жестко соединен с вращающейся частью корпуса. Бак с топливом соединен топливопроводом, в котором установлен топливный насос с приводом насоса, с камерой сгорания, а реактивное сопло выполнено как невращающаяся часть снаряда и установлено на подшипниковых опорах между внутренним и внешним роторами. Органы управления курсом выполнены в виде четырех поворотных аэродинамических рулей. 3 з.п. ф-лы, 11 ил.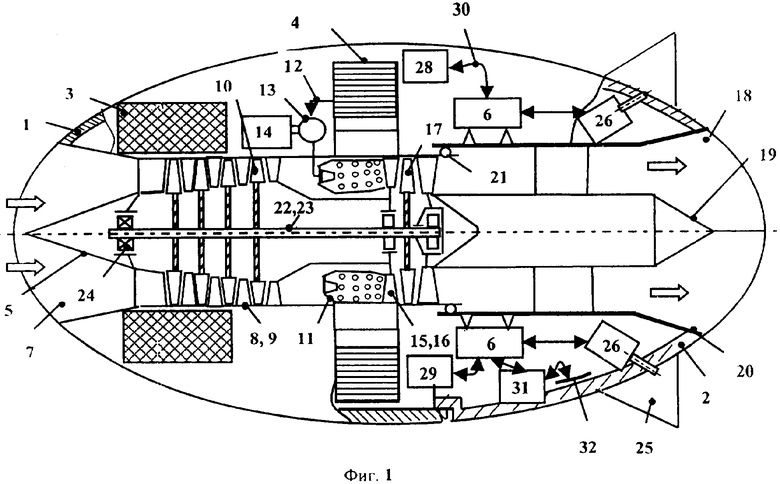
| РАКЕТА | 2005 |
|
RU2272984C1 |
| РАКЕТА | 2005 |
|
RU2276321C1 |
| РАКЕТА | 2002 |
|
RU2234667C1 |
| Горный компас | 0 |
|
SU81A1 |
| Устройство для дистанционного программного управления электроприводными механизмами | 1984 |
|
SU1257614A1 |

