Предложенное изобретение касается устройства, предназначенного для изменения угла установки лопаток двух ступеней неподвижного лопаточного аппарата статора в турбореактивном двигателе.
Круговые ступени лопаток, смонтированных на статоре турбореактивных двигателей, в ряде случаев имеют поддающийся изменению угол установки, то есть упомянутые лопатки при этом имеют возможность поворачиваться вокруг своей оси для того, чтобы изменять характеристики выпрямления течения потока газов. Устройство регулирования этого угла установки лопаток смонтировано снаружи кожуха двигателя и содержит приводной механизм, а также механизм передачи движения к поворотным осям этих лопаток. Существуют многочисленные варианты реализации такого устройства, но они обычно имеют в своем составе приводной рычаг для каждой лопатки, расположенное вокруг кожуха двигателя кольцо синхронизации, с которым связаны все приводные рычаги каждой из лопаток одной и той же ступени, а также приводные средства, которые чаще всего представляют собой гидравлический силовой цилиндр, шток которого имеет возможность выдвигаться или втягиваться. Упомянутое приводное средство связано с упомянутым кольцом синхронизации посредством передачи, которая может содержать стержень синхронизации, отходящий от штока гидравлического силового цилиндра, тягу, шарнирно закрепленную на упомянутом кольце синхронизации, и рычаг управления, соединяющий этот стержень синхронизации с тягой управления посредством кольца и шарнирно связанный с ними.
Эти рычаги управления представляют собой детали, имеющие возможность поворота вокруг центральной оси и снабженные двумя ветвями, образующими между собой некоторый угол, причем одна из этих ветвей связана с рычагом синхронизации, а другая ветвь связана с приводной тягой. Движение штока гидравлического силового цилиндра приводит к перемещению рычага синхронизации, который заставляет поворачиваться рычаг управления. Это движение передается тяге, которая создает тянущее или толкающее усилие, приложенное к кольцу синхронизации и заставляющее это кольцо поворачиваться относительно кожуха двигателя, отклоняя в конечном счете рычаги управления и обеспечивая поворот лопаток.
В том случае, когда лопатки нескольких ступеней неподвижного лопаточного аппарата имеют изменяемый угол установки, часто используется устройство, в котором поворотом всех этих лопаток управляет один единственный силовой привод. При этом остальная часть устройства увеличивается по числу ступеней этих лопаток, причем рычаги синхронизации либо все присоединены к упомянутому приводу, либо образуют цепь, проходящую через рычаги управления. Такое устройство допускает лишь совсем простое управление лопатками ступени, когда поворот этих лопаток представляет собой более или менее линейную функцию относительного перемещения штока гидравлического силового цилиндра. Это не всегда оказывается желательным, и тем не менее в тех случаях, когда лопатки нескольких ступеней неподвижного лопаточного аппарата управляются при помощи одного и того же приводного средства, и может оказаться желательным управлять лопатками этих ступеней последовательно или в соответствии с другими, полностью различными законами, для того чтобы обеспечить наилучшую регулировку эксплуатационных характеристик данного турбореактивного двигателя для различных рассматриваемых в данном случае режимов его функционирования.
В патенте US 3083892А описано устройство, в котором шток гидравлического силового цилиндра связан с кулачком, поворот которого обеспечивается перемещением этого штока. В этом кулачке выполнена канавка, в которую вставлен палец рычага, используемого для управления кольцом синхронизации. Таким образом, появляется возможность реализовать нелинейные законы управления, например законы управления синусоидального типа, между штоком гидравлического силового цилиндра и кольцом синхронизации. При этом лопатки одной единственной ступени управляются упомянутым выше приводным средством в виде поворотного кулачка и некоторыми другими средствами, которые не имеют отношения к настоящему изобретению.
Поворотный кулачок введен в данное устройство только для обеспечения реализации нелинейного закона управления движением. При этом упомянутый кулачок по всей вероятности должен иметь площадь поверхности, достаточную для размещения на ней канавки, обеспечивающей возможность реализации законов неравномерного управления или законов управления с большой амплитудой. В случае использования устройства в соответствии с этим патентным документом реализация различных законов управления для лопаток двух ступеней при помощи одного единственного приводного средства оказывается невозможной. Поворотный кулачок своей формой похож на рычаг управления, и адаптация канавки и скользящего в ней пальца к форме существующего рычага управления будет неблагоприятной для одновременного управления поворотными лопатками нескольких ступеней, причем увеличение площади поверхности рычагов управления оказывается проблематичным из соображения их близости к кожуху данного двигателя. И наконец, значительные усилия, которые должны создаваться в рычаге управления, не допускают его механического ослабления, являющегося следствием наличия в нем протяженной сквозной канавки.
Предлагаемое изобретение касается устройства, обеспечивающего возможность изменения угла установки лопаток по различным и нелинейным законам одновременно для нескольких ступеней и отличающегося также от подобного устройства в соответствии с существующим уровнем техники в данной области.
В своей наиболее общей форме реализации настоящее изобретение относится к устройству обеспечения изменяемого угла установки лопаток для двух ступеней неподвижного лопаточного аппарата статора двигателя, расположенному на кожухе этого двигателя и имеющему в своем составе приводной механизм и, для каждой из управляемых ступеней, рычаг управления, имеющий возможность поворота относительно оси кожуха, и приводную тягу данной ступени лопаток, связанную с одним плечом рычага управления, причем рычаг синхронизации связан с другим плечом, по меньшей мере, одного из этих рычагов управления для приведения его в движение, отличающемуся тем, что один из рычагов синхронизации соединен с упомянутым кожухом двигателя посредством связи, образованной канавкой и пальцем, скользящим в этой канавке, и с рычагом управления, который приводится в движение при помощи связи, образованной канавкой и пальцем, скользящим в этой канавке.
Предлагаемое изобретение будет описано более подробно со ссылками на приведенные фигуры, на которых:
Фиг.1 представляет собой схематично вид в перспективе механизма устройства согласно изобретению;
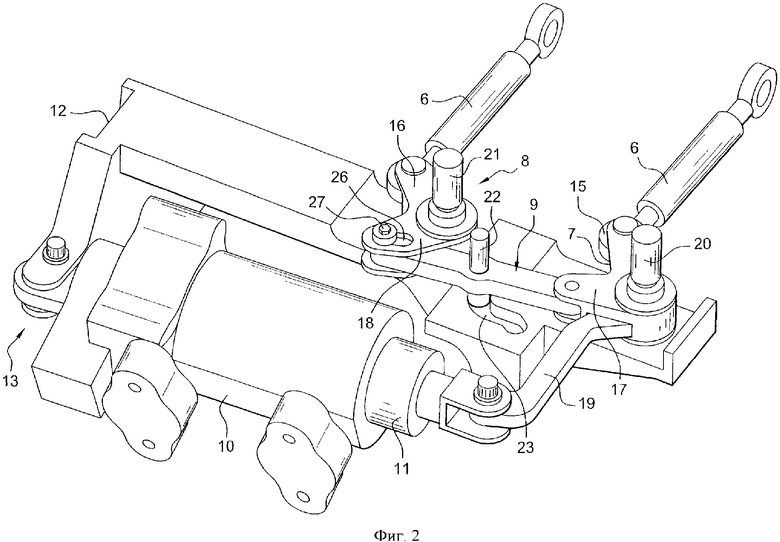
Фиг.2 представляет собой схематично вид в перспективе детали устройства согласно изобретению;
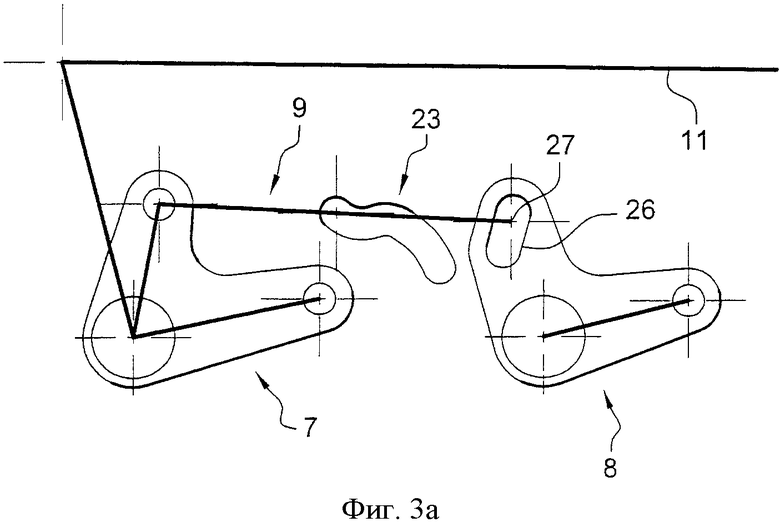
Фиг.3а, 3б и 3с представляют собой схематично иллюстрацию реализации возможного закона управления.
Рассматриваемое в данном случае устройство в целом представлено на фиг.1. Здесь кожух турбореактивного двигателя обозначен позицией 1; лопатки (из которых в данном случае представлена только одна) 2 смонтированы внутри этого кожуха на наружных поворотных осях 3, проходящих сквозь кожух 1, и на внутренних осях, не показанных на приведенных в приложении фигурах и связанных между собой при помощи соединительного кольца; положение каждой из этих лопаток 2 регулируется при помощи устройства, которое теперь будет описано более подробно.
Это устройство содержит рычаги 4, смонтированные на наружных поворотных осях 3, кольца 5 синхронизации, каждое из которых связано с одной ступенью поворотных лопаток 2 и проходит со стороны расположения этих лопаток и на которых смонтированы концы рычагов 4 с возможностью поворота, тяги 6 управления, которые представляют собой винтовые натяжные устройства и которые проходят в тангенциальном направлении по отношению к кольцам 5 синхронизации, и, как это можно видеть на фиг.2, управляющие рычаги 7 и 8, на которых концы тяг 6, противоположные кольцам 5 синхронизации, смонтированы с возможностью поворота, рычаг 9 синхронизации и гидравлический силовой цилиндр 10, содержащий шток 11, приводящий в движение управляющие рычаги 7, и цилиндр, который установлен на корпусе 12 кожуха 1 двигателя с возможностью его поворота относительно пальцевого шарнира 13. Поскольку рычаг 9 синхронизации объединяет два плеча 15 и 16 рычагов 7 и 8 управления, будучи шарнирно соединенным с ними, упомянутые ветви 15 и 16 противоположны ветвям 17 и 18, с которыми шарнирно связаны тяги 6; управляющий рычаг 7 содержит еще ветвь 19, с которой шарнирно соединен шток 11 гидравлического силового цилиндра для того, чтобы управлять движением данного механизма. И наконец, управляющие рычаги 7 и 8 смонтированы с возможностью поворота на корпусе 12 относительно параллельных между собой осей 20 и 21.
Перемещение штока 11 гидравлического силового цилиндра вызывает поворот одного рычага 7 управления и поворот другого рычага 8 управления посредством рычага 9 синхронизации; эти поворотные движения рычагов 7 и 8 управления в свою очередь вызывают поворот тяги 6, кольца 5 синхронизации, рычагов 4 и лопаток 2, заставляя их поворачиваться на требуемый угол, причем закон управления этим движением зависит, в частности, от длины 15, 16, 17 и 18 и углов их взаимного расположения.
В соответствии с предложенным изобретением стержень 9 синхронизации снабжен пальцем 22, который входит в канавку 23, выполненную в корпусе 12. Кроме того, вторая канавка 26 выполнена на втором рычаге 8 управления таким образом, чтобы в эту канавку входил палец 27, предусмотренный на конце рычага 9 синхронизации.
Лапка 25, закрепленная на корпусе 12 и используемая уже для удержания осей поворота рычагов 7 и 8 управления со стороны, противоположной собственно корпусу 12, также содержит точную копию 24 канавки 23, в которую входит другой участок пальца 22 для того, чтобы дополнить направляющее воздействие на стержень 9 синхронизации.
Направление стержня 9 синхронизации в этом устройстве задается в любом положении выдвижения штока 11 гидравлического силового цилиндра 10 посредством канавки 23. При этом углы поворота рычагов 7 и 8 управления изменяются на различные величины. Канавка 23 имеет форму и направление, определенные таким образом, чтобы задать требуемый закон управления поворотных лопаток для данной ступени, связанной с вторым рычагом 8 управления. Здесь важно отметить, что благодаря длине рычага, обеспечиваемой стержнем 9 синхронизации, относительно небольшие отклонения контура канавки 23 могут вызвать значительные изменения угла поворота второго рычага 8 управления. Функция второй канавки 26 состоит в том, чтобы восстановить изостатические характеристики данного механизма, следуя определению используемого в данном случае закона управления. Эта короткая вторая канавка 26, не требующая расширения поверхности второго рычага 8 управления, в целом ряде случаев будет вполне удовлетворительной.
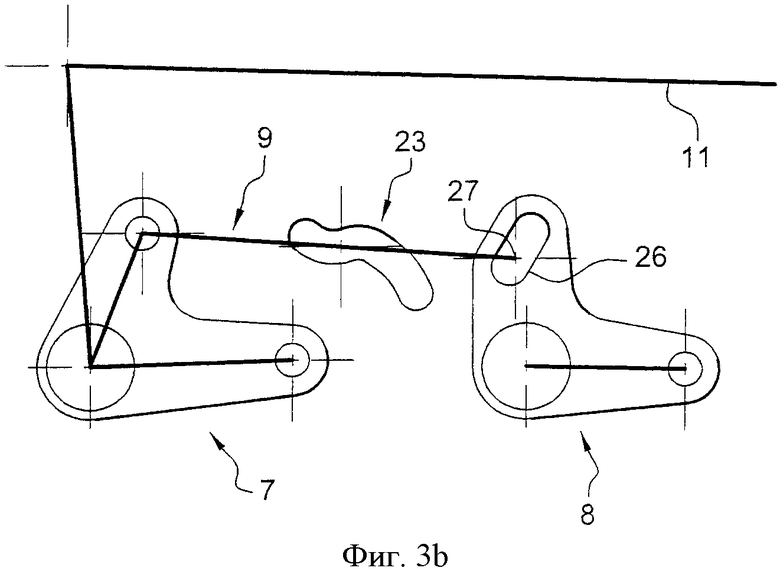
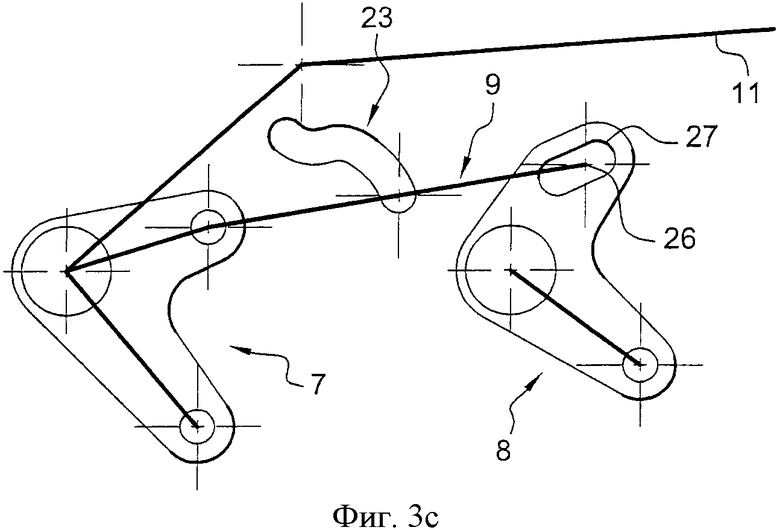
На фиг.3а, 3б и 3с схематично проиллюстрирована ситуация, когда палец 27 конца стержня 9 синхронизации расположен близко к тому же концу второй канавки 26 в предельных положениях штока 11 гидравлического силового цилиндра 10 (как это можно видеть на фиг.3а и 3с) и когда он близок к противоположному концу второй канавки 26 для некоторого среднего положения этого штока 11 гидравлического силового цилиндра (фиг.3б).
Закон управления обычно зависит от множества различных факторов и, главным образом, от направления и формы канавок 23 и 26, а также от их положения относительно рычагов 7 и 8 управления. В рассматриваемом здесь примере реализации можно выделить два основных этапа совершаемого движения. На первом этапе этого движения, происходящем в промежутке между положениями, показанными на фиг.3а и 3б, первая канавка 23 сначала оказывается приблизительно параллельной траектории движения точки шарнирного соединения рычага 9 синхронизации с первым рычагом 7 управления таким образом, чтобы этот стержень синхронизации опускался без значительного изменения его наклона; однако, направление второй канавки вызывает более значительный поворот второго рычага 8 управления по сравнению с поворотом первого рычага 7 управления по мере того как палец 27 перемещается в этой второй канавке 26.
На втором этапе этого движения от положения, показанного на фиг.3б, до положения, показанного на фиг.3с, наклон первой канавки 23 оказывается недостаточным для того, чтобы воспрепятствовать существенному выпрямлению рычага 9 синхронизации, которое сопровождается изменением наклона, уменьшающего угол поворота второго рычага 8 управления. В конечном положении, схематически проиллюстрированном на фиг.3с, перемещение этого второго рычага 8 управления оказывается менее значительным, чем перемещение первого рычага 7 управления.
Предлагаемое изобретение может быть использовано и в других ситуациях, в частности для управления большим числом ступеней поворотных лопаток. При этом устройство в соответствии с предлагаемым изобретением будет применяться с использованием соответствующего количества рычагов синхронизации. Эти рычаги синхронизации могут быть расположены последовательно, как в существующих в настоящее время устройствах, то есть соединять соседние рычаги управления и проходить цепью, либо располагаться параллельно и проходить вплоть до общего рычага управления или даже до собственно приводного элемента. Такое техническое решение не выходит за рамки предлагаемого изобретения.
Изобретение относится к механизму управления углом установки (угловое положение) лопатки неподвижного лопаточного аппарата статора в турбореактивном двигателе, который может быть отрегулирован раздельно для упомянутых лопаток двух соседних ступеней, управляемых одним общим приводным средством. Для этого рычаг 9 синхронизации между механизмами, обеспечивающими управление двумя этими ступенями лопаток, принимает наклонное положение, определяемое при помощи связи, содержащей палец 22 и канавку 23, с упомянутым кожухом, тогда как другая связь, содержащая палец 26 и канавку 27, выполнена между рычагом 9 синхронизации и одним из упомянутых механизмов. Существенным образом нелинейные законы перемещения между двумя этими механизмами могут быть таким образом реализованы при помощи соответствующих форм и направлений упомянутых канавок. 3 ил.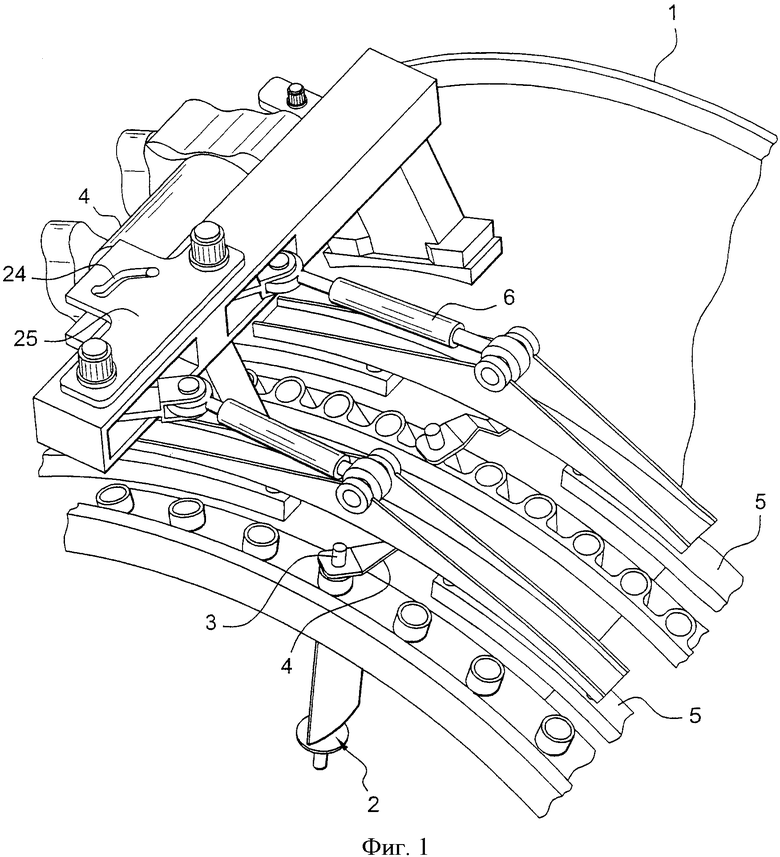
Устройство, предназначенное для обеспечения изменения угла установки лопаток (2) двух ступеней неподвижного лопаточного аппарата статора, расположенное на кожухе (1) и имеющее в своем составе приводной механизм и для каждой из управляемых ступеней лопаток рычаг (7, 8) управления, осуществляющий поворот вокруг оси (20, 21) кожуха, и приводную тягу (6) данной ступени лопаток, связанную с одной ветвью упомянутого рычага управления, причем рычаг (9) синхронизации связан с другой ветвью, по меньшей мере, одного из этих рычагов управления для приведения его в движение, отличающееся тем, что упомянутый рычаг синхронизации соединен с упомянутым кожухом посредством связи, образованной канавкой (23) и пальцем (22), скользящим в этой канавке, и соединен с рычагом управления, который он приводит в движение при помощи другой связи, образованной канавкой (26) и пальцем (27), скользящим в этой канавке.
| СТАТОР КОМПРЕССОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2002 |
|
RU2219378C1 |
| ВЕРТИКАЛЬНЫЙ ОСЕВОЙ ВЕНТИЛЯТОР | 1999 |
|
RU2168072C2 |
| Осевой секционный вертикальный вентилятор | 1973 |
|
SU475455A1 |
| Осевой секционный вертикальный вентилятор | 1984 |
|
SU1211464A1 |
| US 4595340 А, 17.06.1986 | |||
| ШНУР ПЛЕТЕНЫЙ СТРАХОВОЧНО-СПАСАТЕЛЬНЫЙ | 2009 |
|
RU2401894C1 |

