Настоящее изобретение относится к общей области управления оборудованием с изменяемой геометрией газотурбинного двигателя, в частности, турбореактивного двигателя. Более конкретно, изобретение касается оптимизации управления несколькими видами оборудования, входящими в состав различных корпусов газотурбинного двигателя.
Под «оборудованием с изменяемой геометрией» в данном случае понимают оборудование, связанное с органом управления, и размер, форма, положение и/или скорость которого способны изменяться в зависимости от определяемых событий или заданных параметров для воздействия на работу двигателя. Примерами оборудования с изменяемой геометрией являются разгрузочные воздушные задвижки компрессора (с изменяемым отверстием), неподвижные лопатки компрессора с изменяемым углом установки, турбинные лопатки с изменяемым зазором в вершине, топливные насосы с изменяемым расходом, и т.д.
Термин «корпус» означает узел газотурбинного двигателя, содержащий в качестве основных органов компрессор и турбину, объединенных на одной оси. Он может быть многокорпусным. Двигатель с двойным корпусом содержит один корпус, предназначенный для высокого давления, и один корпус, предназначенный для низкого давления. Каждый корпус содержит компрессор и турбину, лопатки которых приводятся во вращение вокруг оси вала, на котором они установлены.
Обычно различные корпуса газотурбинного двигателя сконструированы для работы независимо одни от других. Их скорости вращения являются независимыми, даже если они соединены или коррелированны в определенных режимах работы.
Для управления оборудованием с изменяемой геометрией, которое является частью различных корпусов, для различного оборудования предусмотрены различные системы управления: две системы управления, два привода, два источника мощности и т.д. Отсюда следует, что масса, стоимость и габаритные размеры такой системы управления оборудованием являются относительно высокими. Такая конфигурация является конфигурацией, представленной в заявке на европейский патент Заявителя, опубликованной под номером ЕР 1 724 474.
Например, компрессор корпуса низкого давления может содержать одну или несколько воздушных разгрузочных задвижек (часто обозначаемых как VBV, что является аббревиатурой их английского названия “Variable Bleed Valve”), тогда как компрессор корпуса высокого давления может содержать одну или несколько ступеней статорных лопаток с изменяемым углом установки (часто обозначаемых VSV, что является аббревиатурой их английского названия “Variable Stator Vanes”). Для уменьшения массы этого оборудования, их органов управления представляется, что можно не устанавливать VBV. Если экономия, полученная таким образом, является последовательной (удаляют приводы, сервоклапаны, трубопроводы, арматуру и т.д., с которыми они ассоциированы), то недостатки являются значительными, в частности, в режиме замедления, если вода или град проникают в двигатель, приводя к повышенному риску прекращения действия последнего.
Заявка на патент FR 2 445 439 компании General Electric Company описывает единое средство для управления воздушными разгрузочными задвижками ступени низкого давления и статорных ступеней с изменяемым углом установки ступени высокого давления, но это средство управляет двумя видами оборудования, в основном последовательно, только статорные лопатки приводятся в движение при работе в штатном режиме турбомашины (то есть до режима замедления).
Изобретение предлагает газотурбинный двигатель с оборудованием с изменяемой геометрией, относящимся к различным корпусам двигателя, и оптимизированную систему управления этими видами оборудования.
Таким образом, изобретение касается системы управления, по меньшей мере, двумя типами оборудования с изменяемой геометрией газотурбинного двигателя, при этом двигатель содержит, по меньшей мере, первый корпус, вращающийся с первой скоростью, и второй корпус, вращающийся со второй скоростью, причем первый тип оборудования является ступенью статорных лопаток с изменяемым углом установки компрессора первого корпуса, изменяющейся от закрытого положения при замедлении до открытого положения при режиме большой мощности, при этом второй тип оборудования является, по меньшей мере, разгрузочной задвижкой компрессора второго корпуса, изменяющейся от открытого положения при замедлении до закрытого положения при режиме большой мощности, отличающейся тем, что она содержит привод, который приводит в движение оба типа оборудования.
Используя единственный привод для управления несколькими (по меньшей мере, двумя) типами оборудования с изменяемой геометрией, система управления позволяет уменьшить количество деталей двигателя и, таким образом, достичь цели изобретения. Масса, объем и стоимость второй системы управления, по меньшей мере, в большей части исключены, так как оборудование первого и второго корпусов приводится в движение одним и тем же приводом.
В соответствии с вариантом осуществления система управления выполнена с возможностью управлять более чем двумя типами оборудования с изменяемой геометрией с помощью одного единственного привода.
В соответствии с вариантом осуществления, когда первый корпус приводится в движение с определенной скоростью вращения, привод управляется скоростью вращения первого корпуса.
Таким образом, оборудование второго корпуса управляется скоростью вращения первого корпуса с помощью привода.
В соответствии с конкретным вариантом осуществления первый корпус является корпусом высокого давления, а второй корпус является корпусом низкого давления.
В частности, газотурбинный двигатель содержит компрессор низкого давления и компрессор высокого давления, при этом оборудование с изменяемой геометрией компрессора низкого давления управляется скоростью вращения компрессора высокого давления.
В соответствии с вариантом осуществления в случае газотурбинного двигателя с корпусом высокого давления и корпусом низкого давления оборудование с изменяемой геометрией корпуса высокого давления размещается вблизи корпуса низкого давления (например, вблизи входной стороны корпуса высокого давления).
В соответствии с конкретным вариантом осуществления в этом случае, газотурбинный двигатель является двухкорпусным, с корпусом высокого давления и корпусом низкого давления. Предпочтительно в этом случае ступень или ступени статорных лопаток с изменяемым углом установки является или являются частью корпуса высокого давления, при этом первый тип оборудования управляется системой управления, являющейся частью корпуса низкого давления.
В соответствии с конкретным вариантом осуществления в этом случае ступень лопаток содержит множество лопаток, каждая из которых установлена с возможностью поворота на кожухе турбомашины, а управляющее кольцо, окружающее кожух, связано с каждой из лопаток ступени посредством рычагов, при этом привод выполнен с возможностью вращения управляющего колеса ступени посредством направляющего органа, установленного на кожухе.
В соответствии с вариантом осуществления оборудование с изменяемой геометрией представляет собой воздушную разгрузочную задвижку турбомашины. Это оборудование может содержать одну или несколько воздушных разгрузочных задвижек. Речь идет, например, о воздушной разгрузочной задвижке типа VBV на выходе компрессора низкого давления.
В этом особом случае изобретение обладает следующими преимуществами:
Требуется только один единственный комплект привода вместо двух, а также вспомогательного оборудования, ассоциированного, например, с трубопроводами, сервоклапанами, выходами на блок ручного управления или электродвигателя и т.д.
Сохраняется степень свободы в том, что касается технических характеристик ускорителя без добавления полностью изменяемой геометрии.
Достигается также ремонтопригодность: действительно, устранение приведения в движение VBV устраняет риски неисправностей этой изменяемой геометрии.
Сохраняется способность удаления воды или града на режимах малой мощности. Отсюда следует лучшая стойкость к прекращению действия камеры при замедлении по отношению к конструкции ускорителя без VBV.
Электрическая система упрощена. Исключен локальный контур системы автоматического регулирования: устройство вывода вычислительной машины, арматура, обратный датчик положения (TBC), уменьшенные размеры вычислительной машины …).
Система управления по изобретению может быть также приспособлена для управления различными типами оборудования. Кроме представленного выше, оборудование с изменяемой геометрией может также содержать или формировать элемент одного или нескольких следующих устройств:
- воздушную разгрузочную задвижку компрессора высокого давления с пропорциональным открыванием (часто обозначаемую английским выражением “Transient Bleed Valve” (аббревиатура TBV) или “Start Bleed valve” (аббревиатура SBV));
- воздушную разгрузочную задвижку компрессора высокого давления с двумя крайними положениями (часто обозначаемую английским выражением “Handing Bleed Valve” (аббревиатура HBV));
- вентиль регулирования расхода воздуха, участвующего в контроле люфта в турбине низкого давления (часто обозначаемый английским выражением “Low Pressure Turbine Active Clearance Control” (аббревиатура LPTACC)), или в турбине высокого давления (часто обозначаемый английским выражением “High Pressure Turbine Active Clearance Control” (аббревиатура НРТАСС)).
В соответствии с вариантом осуществления в системе управления привод содержит подвижный управляющий орган, перемещения которого передают команду на оборудование с изменяемой геометрией. Управляющий орган может, например, содержать шток силового цилиндра.
В соответствии с вариантом осуществления, привод выполнен с возможностью осуществления движения первого типа оборудования с изменяемой геометрией путем изменения параметра в диапазоне работы первого оборудования, при этом привод выполнен с возможностью обеспечения движения второго оборудования с изменяемой геометрией путем изменения того же параметра в диапазоне работы второго оборудования.
Упомянутым выше параметром привода может являться, например, положение рабочего органа привода. Таким образом, этим параметром может являться положение конца штока силового цилиндра. Таким образом, в этом случае изменение параметра означает перемещение конца штока силового цилиндра или положение рабочего конца привода.
В соответствии с предпочтительным вариантом осуществления система управления, в которой привод управляет штоком, на котором установлен барабанный орган управления, приводящий в движение один из типов оборудования и соединен с упомянутым штоком посредством соединения, которым он приводится в движение, при этом упомянутое соединение содержит стержень, подвижный в направляющей дорожке, определяющей закон приведения в движение упомянутого оборудования в зависимости от перемещения штока привода.
В соответствии с вариантом осуществления шток приводит в движение другой тип оборудования.
В соответствии с другим вариантом осуществления система содержит второй барабанный орган управления, приводящий в движение другой тип оборудования и который сам приводится в движение штоком посредством соединения, содержащего стержень, подвижный в направляющей дорожке, при этом профиль направляющей дорожки определяет закон приведения в движение упомянутым другим типом оборудования в зависимости от перемещения штока, управляемого приводом.
Когда параметр приведения в движение изменяется в интервале, находящимся вне диапазона приведения в движение оборудования, последнее не приводится в движение приводом. Такой интервал значений параметра привода, в котором никакого движения не применяется к рассматриваемому оборудованию, образует для упомянутого оборудования «мертвый ход». В таком диапазоне, каковыми бы ни являлись изменения параметра, двигатель не воздействует (или воздействует незначительно) на рассматриваемое оборудование.
В соответствии с предпочтительным вариантом осуществления, по меньшей мере, одна часть диапазона работы первого оборудования находится вне диапазона приведения в движение второго оборудования.
Управление с помощью единого привода двумя типами оборудования с изменяемой геометрией может быть облегчено тем, что диапазон работ двух типов оборудования полностью не совпадают, позволяя вне общей зоны работать только одному типу оборудования.
В соответствии с другим конкретным вариантом осуществления диапазоны работы первого и второго типов оборудования разнесены, то есть диапазон работы первого оборудования находится полностью вне диапазона работы второго оборудования (диапазоны не совпадают).
Таким образом, оборудование может приводиться в движение поочередно. Действительно, когда изменяют параметр привода в диапазоне приведения в движение первого оборудования, эти изменения, по существу, не вызывают никакого движения, не оказывают никакого влияния на второе оборудование, и наоборот.
В соответствии с конкретным вариантом осуществления диапазон приведения в движение одного из первого или второго типов оборудования полностью входит в диапазон приведения в движение другого типа оборудования.
В этом случае оборудование включается одновременно в их общей зоне, что может представлять собой преимущество в соответствии со свойствами типов оборудования. Такой вариант осуществления позволяет предусмотреть более значительную амплитуду приведения в движение.
В соответствии с конкретным вариантом осуществления в этом случае диапазон приведения в движение одного из типов оборудования имеет амплитуду, значительно меньшую общей амплитуды диапазона приведения в движение другого типа оборудования; например, он может составлять менее 20% или менее 10% этого диапазона. Отсюда следует, что когда диапазон оборудования при уменьшенном диапазоне приведения в движение входит в диапазон работы другого оборудования, управляющие воздействия оборудования приводят только к слабому и/или малозначительному изменению управления другим типом оборудования. Такое размещение с единой системой управления облегчает управление двумя типами оборудования.
Система управления, предпочтительно, выполнена с возможностью того, чтобы изменения параметра привода между границами его диапазона работы были достаточны для приведения в движение оборудования с достаточной амплитудой.
В соответствии с вариантом осуществления связь между приводом и одним из типов оборудования содержит расцепляющее устройство, выполненное с возможностью прекратить приведение в движение этого оборудования посредством привода в диапазоне величин параметра приведения в движение. Этот диапазон величин находится вне диапазона работы рассматриваемого оборудования. Таким образом, расцепляющее устройство позволяет сохранить интервал диапазона приведения в движение по одной команде от другого (или других) типов оборудования. Это может являться определяющим, когда рассматриваемое оборудование не должно быть задействовано даже тогда, когда команда одного из других управляемых типов оборудования изменяется.
В соответствии с вариантом осуществления система управления содержит, кроме того, средство возврата, удерживающее орган управления одним из типов оборудования в заранее заданном положении, по меньшей мере, когда параметр привода изменяется в интервале, находящимся вне диапазона приведения в движение оборудования.
Изобретение касается также газотурбинного двигателя, снабженного представленной выше системой управления.
В дальнейшем изобретение поясняется нижеследующим описанием двигателя и системы, не являющимся ограничительным, со ссылками на сопровождающие чертежи, на которых:
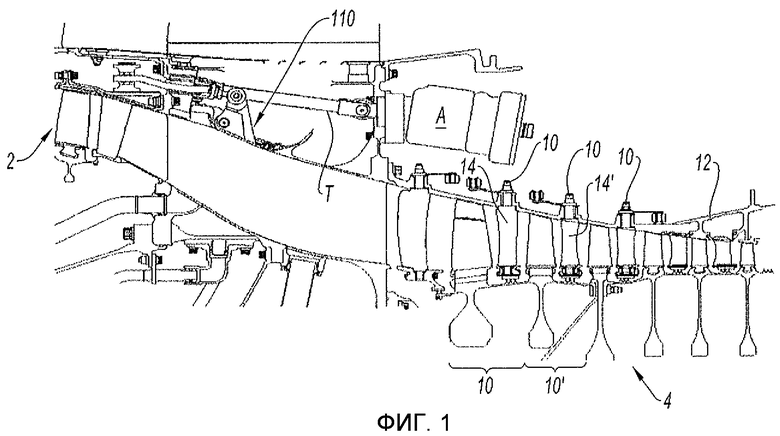
- фиг.1 изображает в осевом разрезе часть турбореактивного двигателя из известного уровня техники, содержащего разгрузочную задвижку VBV и статорные лопасти с изменяемым углом установки;
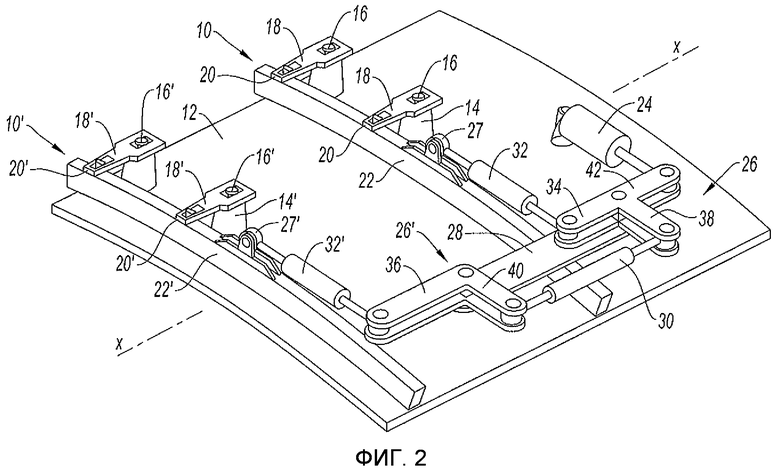
- фиг.2 изображает вид в изометрии системы управления VSV в соответствии с известным уровнем техники;
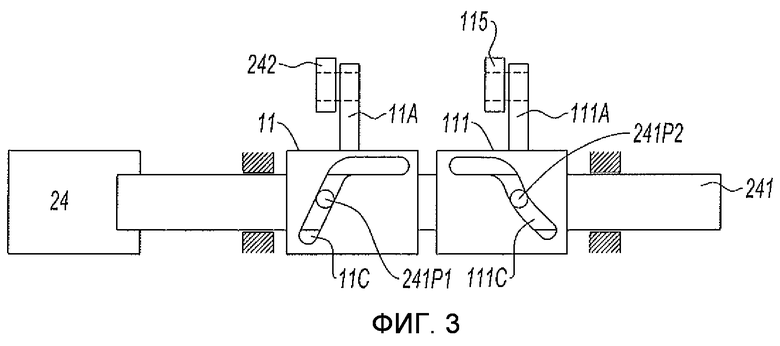
- фиг.3 схематично изображает вид сверху устройства управления положением двух типов оборудования;
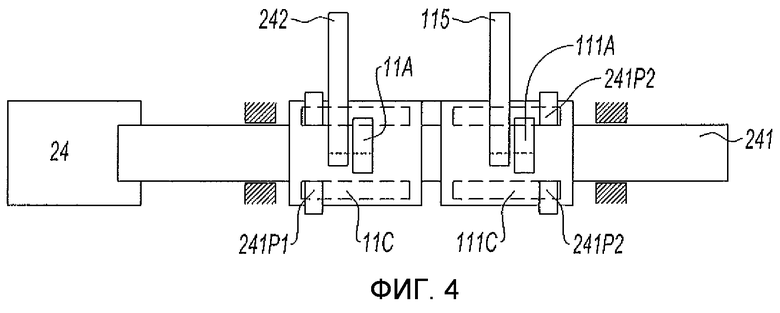
- фиг.4 схематично изображает вид сбоку устройства по фиг.3;
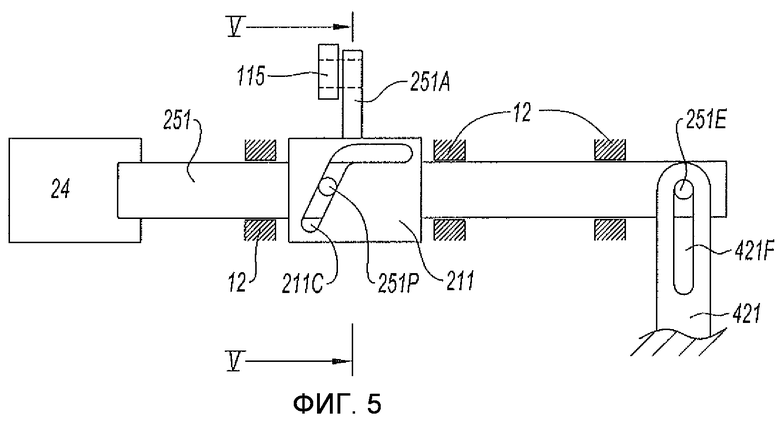
- фиг.5 схематично изображает другой вариант осуществления с единственным барабанным органом управления;
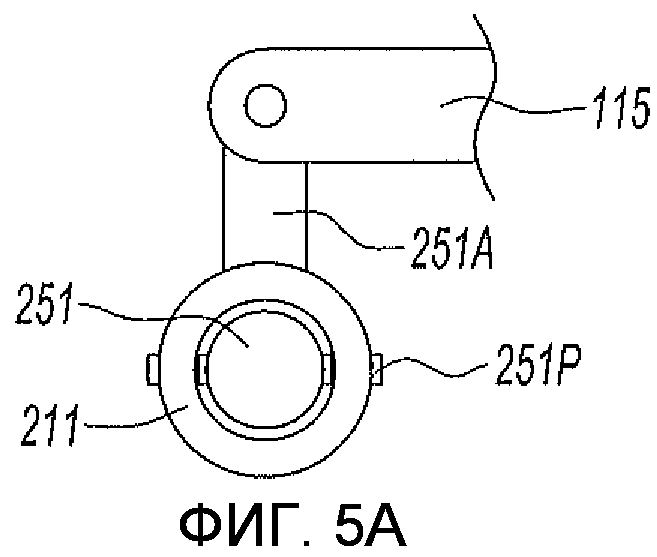
- фиг.5а изображает разрез по фиг.5 в направлении V-V,
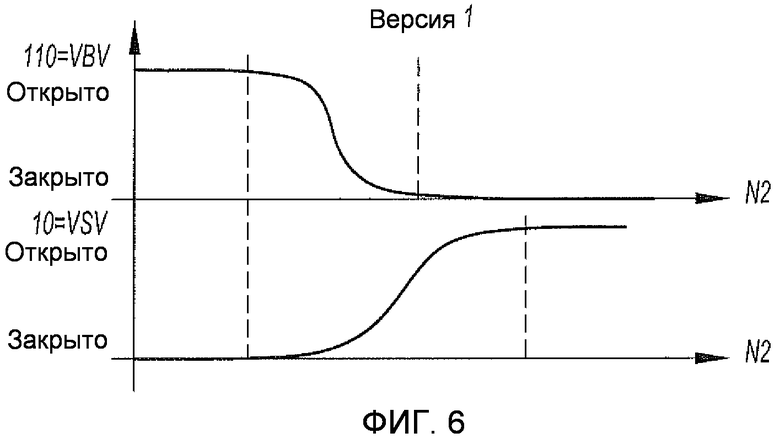
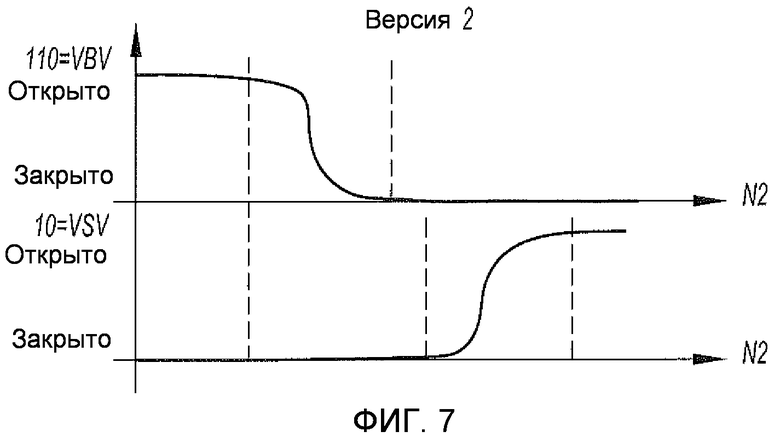
- фиг 6 и 7 представляют кривые, иллюстрирующие положение статорных лопаток и разгрузочных задвижек в зависимости от режима двигателя в случае перекрытия и в случае отсутствия перекрытия диапазонов открывания и закрывания двух типов оборудования.
Известным образом, как изображено на фиг.1 и 2, газотурбинный двигатель, используемый в области авиации, такой как турбореактивный двигатель, имеющий в данном случае ось Х-Х, содержит расположенные от входа к выходу вентилятор, компрессор 2 низкого давления, компрессор 4 высокого давления, камеру сгорания, турбину высокого давления, турбину низкого давления и сопло для выброса газов (не изображенные на чертеже). Компрессор и турбина высокого давления жестко установлены на одном и том же валу высокого давления и относятся, таким образом, к корпусу высокого давления двигателя или первому корпусу, вращающемуся при первой скорости, тогда как компрессор и турбина низкого давления жестко установлены на одном и том же валу низкого давления и относятся, таким образом, к корпусу низкого давления двигателя или второму корпусу, вращающемуся при второй скорости.
Ниже будут использованы аббревиатуры ВР для низкого давления и НР для высокого давления.
Компрессор НР 4 содержит, по меньшей мере, одну ступень, образованную колесом подвижных лопаток и колесом неподвижных лопаток (также называемым статорным колесом). Каждая ступень образована множеством лопаток, расположенных радиально вокруг оси Х-Х турбомашины. В данном случае компрессор НР содержит множество ступеней расположенных попеременно колес с подвижными лопатками и колес с неподвижными лопатками. Лопатки закрыты цилиндрическим кожухом 12, который расположен по центру на оси Х-Х турбомашины.
Среди колес с неподвижными лопатками, по меньшей мере, одна ступень 10 содержит лопатки 14 с изменяемым углом установки. Каждая лопатка 14 установлена с возможностью поворота на оси 16 (или стержне), которая проходит сквозь кожух 12. Угловое положение каждой лопатки 14 может регулироваться путем приведения во вращение ее стержня 16.
Ступень 10 лопаток с изменяемым углом установки образует первый тип оборудования с изменяемой геометрией, относящийся к корпусу НР (так как он принадлежит компрессору НР). Изменяемым параметром этого оборудования является угол лопаток 14; в данном случае все лопатки 14 приведены одновременно во вращение благодаря управляющему кольцу 22 ступени 10 лопаток 14.
Управляющее кольцо 22 имеет общую кольцевую форму; оно окружает кожух 12 и расположено по центру на оси Х-Х турбомашины. Одновременное изменение углового положения лопаток 14 обеспечивается известным образом поворотом управляющего кольца 22 вокруг оси Х-Х двигателя.
На фиг.2 изображен механизм синхронного управления двумя ступенями статорных лопаток 10 и 10' из известного уровня техники. Система управления выполнена с возможностью вращения колец 22 и 22', управляющих ступенями 10 и 10' лопаток с изменяемым углом установки.
Система управления содержит привод 24, в данном случае силовой цилиндр, который механически связан со ступенью 10 для приведения во вращение статорных лопаток. Для этого каждый стержень 16, 16' лопаток 14, 14' с изменяемым углом установки соединен с концом управляющей тяги 18, 18', другой конец которой шарнирно установлен вокруг пальца 20, 20', закрепленного неподвижно на управляющем кольце 22, 22' и размещен радиально относительно него.
Кольцо содержит, по меньшей мере, одну втулку 27, 27', с которой жестко соединена управляющая тяга 32, 32' типа винтовой стяжной муфты, размещенной, по существу, по касательной к кольцу 22, 22'. Другой конец управляющей тяги 32 жестко соединен с возвратным органом 26, 26', установленным с возможностью поворота на коробке 28 кожуха 12 компрессора. Управляемый возвратный орган 26 выполнен Т-образной формы. Управляющая тяга 32 закреплена на конце первой ветви 34 управляемого возвратного органа 26, а конец штока силового цилиндра 24 шарнирно закреплен на конце второй ветви 42, которая расположена, по существу, в продолжение первой ветви 34.
Отслеживающий возвратный орган 26' выполнен L-образной формы с ветвью 36, связанную с тягой 32', и ветвью 40, связанной посредством штанги синхронизации с третьей ветвью 38 Т-образной формы. Привод (силовой цилиндр) 24 может приводить во вращение управляющее кольцо 22 ступени 10 лопаток с изменяемым углом установки с помощью управляющего возвратного органа 26, который передает движение силового цилиндра 24 на управляющую тягу 32, которая сама передает движение кольцу 22, с которым она жестко соединена при перемещении (криволинейном). Привод приводит во вращение управляющее кольцо 22' с помощью штанги синхронизации 30. Силовой цилиндр 24 управляется блоком электронного управления. Его движения являются функцией скорости N2 вращения компрессора НР.
Двигатель, как изображено на фиг.1, содержит второе оборудование 110 с изменяемой геометрией. Речь идет в данном случае о воздушной разгрузочной задвижке типа VBV. Изменяемым параметром этого оборудования 110 является угол открытия разгрузочной задвижки 110. Это оборудование 110 размещено на выходе компрессора ВР. Функцией задвижки VBV 110 является снятие воздушной нагрузки на выходе компрессора ВР 2 в зависимости от заданных условий работы. Второй тип 110 оборудования обычно содержит множество таких задвижек.
В соответствии с известным уровнем техники оборудование 110 управляется собственной системой управления. На фиг.1 изображен привод А, который воздействует на задвижку посредством Т-образного рычага.
В соответствии с изобретением предложена система одновременного управления двумя типами оборудования. Так, привод 24, который управляет лопатками VSV, управляет также перемещением органа 115 управления вторым типом 110 оборудования с помощью специального устройства.
На фиг.3 и 4 представлен привод 24, шток которого и его соединение с плечом 42 были изменены. Шток 241 привода всегда подвижен при перемещении. Он скользит в первом барабане 11 и втором барабане 111. Эти два барабана являются цилиндрическими и аксиально блокированы. Они могут, однако, поворачиваться вокруг оси штока 241, удерживаясь на штоке, например, с помощью шариковых подшипников. Каждый из них снабжен двумя направляющими дорожками, 11С и 111С соответственно, в которых перемещаются радиальные стержни 241Р1 и 241Р2, жестко соединенные со штоком 241. Каждый барабан 11 и 111 содержит также радиальный выступ 11А и 111А соответственно. Выступы соединены шарнирной связью с органом управления 242 для барабана 11 и 115 для барабана 111. Орган 242 соединен с управляющим возвратным органом, таким как 42, первого типа оборудования; в данном случае речь идет об оборудовании VSV. Орган управления 115 соединен со вторым типом 110 оборудования, которым он управляет, в данном случае речь идет о разгрузочных задвижках VBV.
Работа системы приведения в движение осуществляется следующим образом. Привод 24, перемещая аксиально шток 241, воздействует на барабаны 11 и 111 посредством стержней 241Р1 и 241Р2, которые скользят внутри направляющих дорожек 11СА и 111С соответственно. В этом примере шток 241 не может поворачиваться вокруг своей оси, и барабаны установлены с возможностью вращения и скольжения на штоке, например, благодаря использованию шариковых подшипников, и заблокированы по оси относительно картера. Таким образом, перемещение стержней внутри направляющих дорожек приводит к вращению барабанов вокруг оси штока привода по профилю дорожек. Понятно, что будет достаточным правильно скомпоновать направляющие дорожки 11С и 111С для определения закона приведения в движение двух типов оборудования посредством органов 115 и 242. Так, часть осевой дорожки на барабане не приводит в движение последний, когда соответствующий стержень перемещается вдоль нее, и не вызывает перемещения присоединенного органа. Речь идет о части мертвого хода. Впрочем, понижающее передаточное отношение движения может быть получено выбором соответствующей длины выступов, образующих рычаги 11А и 111А.
В соответствии с вариантом осуществления, не изображенном на чертежах, используют привод, шток которого поворачивается вокруг собственной оси вместо продольного перемещения. В этом случае также изменяют движение барабанов. Таким образом, они выполнены с возможностью к продольному перемещению и, следовательно, воспринимают команду типов оборудования.
В соответствии с другим типом осуществления, изображенном на фиг.5 и 5А, на штоке привода размещают один единственный барабан. Привод 24 содержит шток 251, скользящий по оси относительно кожуха 12. Шток управляет вращением управляющего рычага 421, воздействующего на лопатки с изменяемым углом установки VSV, когда он поворачивается вокруг оси 421А. По оси рычага 421 выполнена прорезь 421F, в которой скользит стержень 251Е, жестко соединенный со штоком для обеспечения преобразования движения перемещения во вращательное управляющего рычага. Барабан 211 установлен на штоке 251. Как и в предыдущем варианте, барабан установлен с возможностью вращения и скольжения по штоку. Напротив, он аксиально неподвижен относительно кожуха 12, который удерживает всю сборку. Шток содержит пару радиальных стержней 251Р, которые взаимодействуют с направляющей дорожкой С, выполненной на стенке барабана 211. Радиальный выступ 251А на барабане 211 соединен с органом 115 приведения в движение разгрузочных задвижек VBV.
Работа системы по фиг.5 заключается в перемещении штока 251 на части хода от входного положения, где разгрузочные задвижки VBV находятся в открытом положении, а лопатки VSV находятся в закрытом положении. Последовательно перемещаясь направо относительно чертежа, шток приводит в движение лопатки VSV, которые открываются. В процессе этой части хода штока 251 барабан 211 поворачивается вокруг оси штока 251 по профилю направляющей дорожки вследствие взаимодействия последней со стержнями 251Р, при этом профиль дорожки выполнен с возможностью приведения во вращение барабана вокруг оси штока и перемещения органа управления разгрузочными задвижками в сторону закрывания. Когда стержень 251Р находится в части дорожки, которая ориентирована внутрь оси штока, барабан не вращается больше, даже если шток продолжает выдвигаться, и открывает статорные лопатки VSV. В конце хода разгрузочные задвижки закрыты и лопатки открыты. Такая последовательность операций является реверсивной.
В соответствии с вариантом можно инвертировать команды лопаткам статора VSV в команды на открывание задвижек VBV.
Можно также изменить работу штока в движение поворота.
На фиг.6 и 7 проиллюстрированы законы относительного открывания лопаток с изменяемым углом установки (обозначенных позицией 10 или VSV) и разгрузочных задвижек (обозначенных позицией 110 или VBV) в зависимости от скорости вращения N2 корпуса НР. При нулевой скорости разгрузочные задвижки открыты, а лопатки с изменяемым углом установки закрыты. В версии V1, представленной на фиг.7, по мере того, как скорость N2 возрастает, начинают открываться лопатки с изменяемым углом установки одновременно с закрытием разгрузочных задвижек VBV, что оканчивается позже, тогда как в версии V2, представленной на фиг.6, открытие лопаток начинается только после закрытия разгрузочных задвижек. Выбор версии и точного момента начала закрытия разгрузочных задвижек задаются профилем направляющих дорожек, выполненных на поверхности барабана. Удлинение осевых частей дорожки на барабане 111 или барабане 211 задерживает начало закрытия разгрузочных задвижек, тогда как их укорачивание ускоряет.
Хотя изобретение было описано в отношении нескольких конкретных вариантов осуществления, очевидно, что оно не ограничено и включает в себя все технические эквиваленты описанных средств, а также их комбинации с теми, что входят в рамки настоящего изобретения.
Настоящее изобретение касается системы управления, по меньшей мере, двумя типами оборудования с изменяемой геометрией газотурбинного двигателя, содержащего первый корпус и второй корпус, при этом первым оборудованием является ступень статорных лопаток с изменяемым углом установки компрессора первого корпуса, а вторым оборудованием является, по меньшей мере, разгрузочная задвижка компрессора второго корпуса. Система содержит привод, который приводит в движение оба типа оборудования. Привод управляет штоком, на котором установлен барабанный орган управления. Соединение барабанного органа со штоком содержит стержень, размещенный подвижно в направляющей дорожке, а профиль направляющей дорожки определяет закон приведения в движение упомянутого оборудования в зависимости от перемещения штока привода. Такое выполнение системы позволит ее упростить и оптимизировать ее работу. 2 н. и 7 з.п. ф-лы, 7 ил.
1. Система управления, по меньшей мере, двумя типами оборудования (10, 110) с изменяемой геометрией газотурбинного двигателя, при этом двигатель содержит, по меньшей мере, один первый корпус, вращающийся с первой скоростью, и один второй корпус, вращающийся со второй скоростью, причем первый тип оборудования (10) является ступенью статорных лопаток с изменяемым углом установки компрессора первого корпуса, изменяющейся от закрытого положения при замедлении до открытого положения при большой мощности, а второй тип оборудования является, по меньшей мере, разгрузочной задвижкой компрессора второго корпуса, изменяющейся от открытого положения при замедлении до закрытого при большой мощности, при этом система дополнительно содержит привод (24), который приводит в движение оба типа оборудования, отличающаяся тем, что привод (24) управляет штоком (241, 251), на котором установлен барабанный орган управления (11, 111; 211), при этом барабанный орган управления приводит в движение один из двух типов оборудования и соединен с упомянутым штоком соединением, посредством которого он приводится в движение, причем упомянутое соединение содержит стержень (241Р1, 241Р2; 251Р), размещенный подвижно в направляющей дорожке (11С, 111С; 211С), а профиль направляющей дорожки определяет закон приведения в движение упомянутого оборудования в зависимости от перемещения штока (241; 251) привода.
2. Система управления по п.1, в которой первый корпус является корпусом высокого давления, а второй корпус является корпусом низкого давления.
3. Система управления по п.1, в которой привод (24) управляется в зависимости от скорости вращения одного из корпусов двигателя.
4. Система управления по п.3, в которой привод (24) управляется в зависимости от скорости вращения корпуса высокого давления.
5. Система по п.1, в которой шток (251) приводит в движение другой тип оборудования.
6. Система по п.1, содержащая второй барабанный орган управления (111), приводящий в движение другой тип оборудования и приводимый в движение штоком (241) также с помощью соединения, содержащего стержень (241Р2), подвижный в направляющей дорожке (111С), при этом профиль направляющей дорожки определяет закон приведения в движение упомянутого другого типа оборудования в зависимости от перемещения штока (241), управляемого приводом.
7. Система управления по п.1, в которой каждый закон приведения в движение типов оборудования содержит диапазон приведения в движение, при этом диапазон приведения в движение одного из видов оборудования входит в диапазон приведения в движение другого типа оборудования.
8. Система управления по п.1, в которой каждый закон приведения в движение типов оборудования содержит диапазон приведения в движение, при этом диапазон приведения в движение второго типа оборудования (110) полностью находится вне диапазона работы первого оборудования (10).
9. Газотурбинный двигатель, содержащий систему управления по одному из предыдущих пунктов.

