Область техники
Предлагаемое изобретение относится к управлению ступенями лопаток с изменяемым углом установки, используемых в турбореактивных двигателях.
Предшествующий уровень техники
В турбореактивном двигателе известно использование одной или нескольких ступеней лопаток статора, предназначенных для регулирования потока и направления течения газов, проходящих через участок сжатия газов, в функции режима функционирования данного турбореактивного двигателя. При этом каждая из этих ступеней лопаток статора имеет в своем составе множество лопаток (называемых лопатками с изменяемым углом установки), которые выполнены с возможностью поворота относительно их осей связи со статором таким образом, чтобы угол установки этих лопаток мог быть модифицирован в функции режима функционирования данного турбореактивного двигателя.
Известные устройства, предназначенные для управления ступенями лопаток с изменяемым углом установки, обычно имеют в своем составе орган управления, выполненный в форме кольца, охватывающего кожух данного турбореактивного двигателя, и множество тяг или рычагов, причем каждый из этих рычагов содержит первый конец, связанный с упомянутым кольцом управления при помощи шарнирного соединения, и второй конец, смонтированный на оси вращения соответствующей лопатки. Приводной силовой цилиндр управления связан с упомянутым кольцом управления для того, чтобы приводить это кольцо во вращательное движение относительно оси данного турбореактивного двигателя. Это вращение упомянутого кольца относительно оси турбореактивного двигателя влечет за собой синхронизированное изменение углового положения лопаток данной ступени лопаток.
В том случае, когда речь идет об синхронном управлении двумя ступенями лопаток с изменяемым углом установки, которые имеют возможность изменять свое положение в осевом направлении, известно также использование рычага синхронизации, предназначенного для передачи вращательного движения приводного кольца, обеспечиваемого при помощи силового цилиндра управления, к кольцу управления другой ступени лопаток. Эта передача движения осуществляется посредством передаточных органов, установленных с возможностью вращения на кожухе турбореактивного двигателя и связанного, с одной стороны, с упомянутым рычагом синхронизации, а с другой стороны, с упомянутыми кольцами управления.
Такая система управления создает движения в различных управляемых ступенях лопаток, которые могут быть представлены в виде кривых, демонстрирующих изменение угла установки лопаток ведомой ступени в функции изменения угла установки лопаток ведущей ступени лопаток. При использовании описанной выше системы управления ступенями лопаток эти кривые, называемые кривыми корреляции, представляют постепенное изменение наклона. Этот тип системы управления позволяет также обеспечивать только простое управление ступенями лопаток.
Однако все более распространенной становится ситуация, когда аэродинамические требования, предъявляемые к управлению изменением углового положения лопаток, требуют использования более сложных законов управления. Эти законы управления выражаются, в частности, при помощи кривых корреляции, изменение которых не является просто постепенным изменением наклона, но содержит также участки кривых, имеющие синусоидальный характер.
В патенте ЕР 0909880 описано устройство, обеспечивающее изменение угла установки лопаток и позволяющее реализовать нелинейные законы управления. В этом устройстве каждый рычаг ведущей ступени лопаток соединен с соответствующим кольцом управления при помощи связи, образованной канавкой и выступом, скользящим в этой канавке. Такая система управления, оказывается не вполне удовлетворительной, поскольку она не позволяет воспроизвести все возможные типы законов управления.
Объект и краткое изложение предлагаемого изобретения
Основная техническая задача данного изобретения состоит, таким образом, в том, чтобы устранить имеющиеся в существующих системах подобного рода недостатки и разработать такую систему управления, которая позволяет реализовать любой тип закона изменения угла установки лопаток независимо от его сложности.
Для решения этой технической задачи предлагается система управления двумя ступенями лопаток статора турбореактивного двигателя с изменяемым углом установки лопаток, причем каждая ступень образована множеством лопаток, каждая из которых установлена с возможностью поворота на кожухе турбореактивного двигателя, и кольцом управления, охватывающим упомянутый кожух и связанным с каждой из лопаток данной ступени посредством рычагов, причем эта система управления содержит приводной элемент, предназначенный для приведения во вращательное движение кольца управления одной из ступеней лопаток посредством ведущего органа, установленного на кожухе двигателя с возможностью поворота, и рычаг синхронизации, предназначенный для передачи вращательного движения кольца управления, приводимого в движение приводным элементом, на кольцо управления другой ступени лопаток посредством следящего органа, установленного на кожухе двигателя с возможностью поворота, отличающаяся тем, что эта система содержит дополнительный поворотный орган, введенный между упомянутым следящим органом и ведомым кольцом управления, причем упомянутый дополнительный поворотный орган установлен с возможностью поворота на упомянутом следящем органе и связан с кожухом двигателя при помощи ролика, скользящего в канавке, выполненной в кожухе.
В данном случае под ведомым кольцом управления следует понимать кольцо управления, которое приводится во вращательное движение посредством упомянутого следящего органа.
В соответствии с предпочтительным вариантом осуществления предлагаемого изобретения упомянутая канавка имеет форму и направление, определенные таким образом, чтобы компенсировать расхождения траектории между требуемым законом изменения угла установки лопаток и номинальным законом изменения угла их установки. В данном случае под номинальным законом изменения угла установки лопаток следует понимать закон изменения угла установки, для которого кривая корреляции с постепенным наклоном будет получена при помощи обычной системы управления, лишенной дополнительного поворотного органа. Этот дополнительный поворотный орган представляет собой дифференциальный направляющий элемент, интегрирующий только отклонения траектории по отношению к номинальному закону изменения угла установки лопаток. Другими словами, упомянутый ролик системы управления в соответствии с предлагаемым изобретением поглощает в качестве разности уровней только различие, существующее между требуемым законом изменения угла установки лопаток и номинальным законом изменения угла их установки. Таким образом, данная система управления позволяет обеспечить такие законы изменения угла установки лопаток, которые невозможно будет реализовать с использованием традиционных систем управления.
В соответствии с другим предпочтительным вариантом осуществления предлагаемого изобретения упомянутый дополнительный поворотный орган содержит первое плечо, связанное с ведомым кольцом управления посредством некоторого первого рычага управления, и второе плечо, связанное с кожухом двигателя при помощи ролика.
В соответствии с еще одним предпочтительным вариантом осуществления предлагаемого изобретения упомянутый следящий орган содержит первый рычаг, связанный с возможностью поворота с упомянутым дополнительным поворотным передаточным механизмом, и второй рычаг, связанный с концом рычага синхронизации. В этом случае ведущий орган содержит первый рычаг, связанный с кольцом управления ведущей ступени посредством второго рычага управления, второй рычаг, связанный с концом рычага синхронизации, противоположным тому его концу, который связан со следящим органом, и третий рычаг, связанный с элементом управления.
Краткое описание чертежей
Другие характеристики и преимущества предлагаемого изобретения будут лучше поняты из описания не являющегося ограничительным примера его осуществления, приводимого со ссылками на сопровождающие фигуры чертежей, в числе которых:
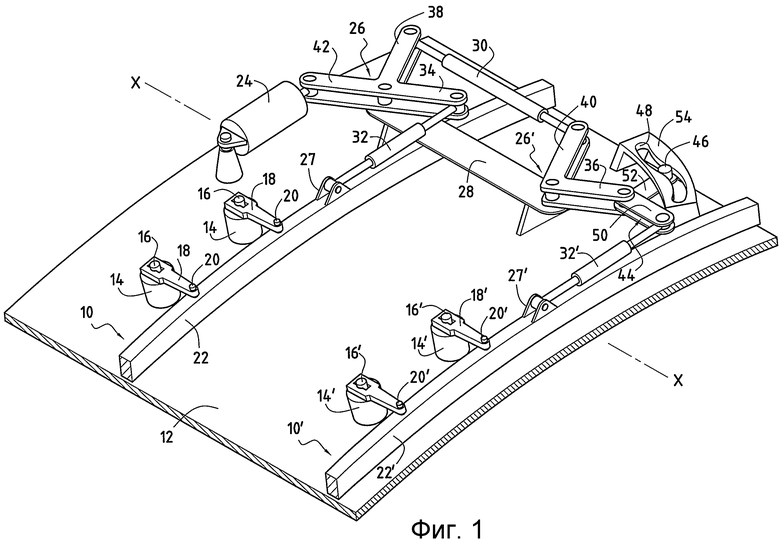
Фиг.1 представляет собой частичный схематический вид в изометрии системы управления в соответствии с одним из способов осуществления предлагаемого изобретения;
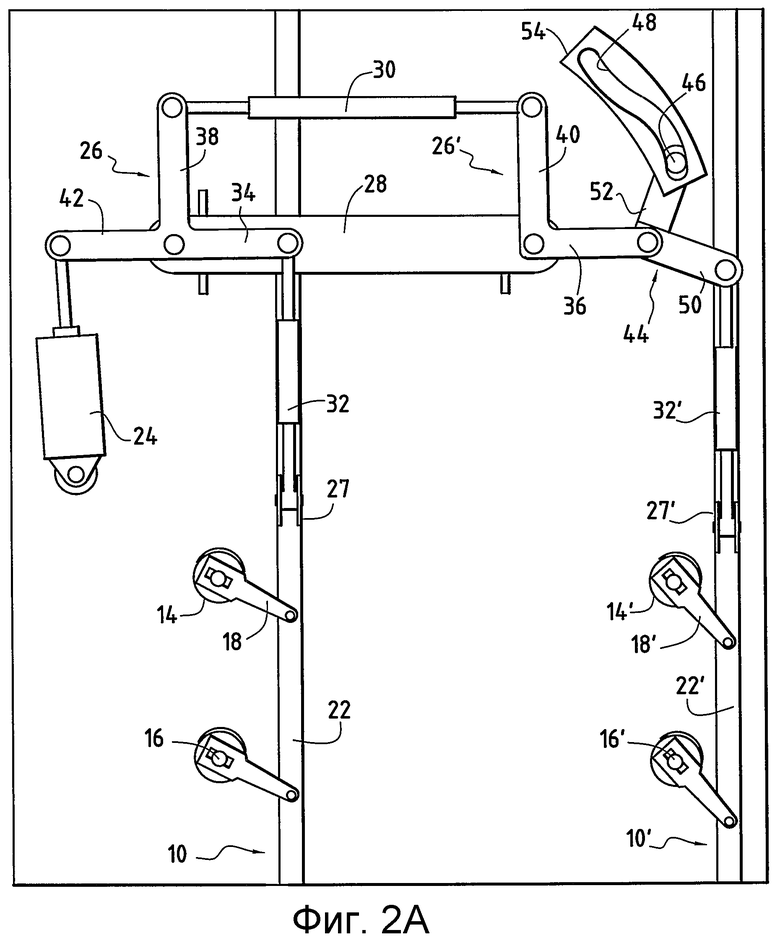
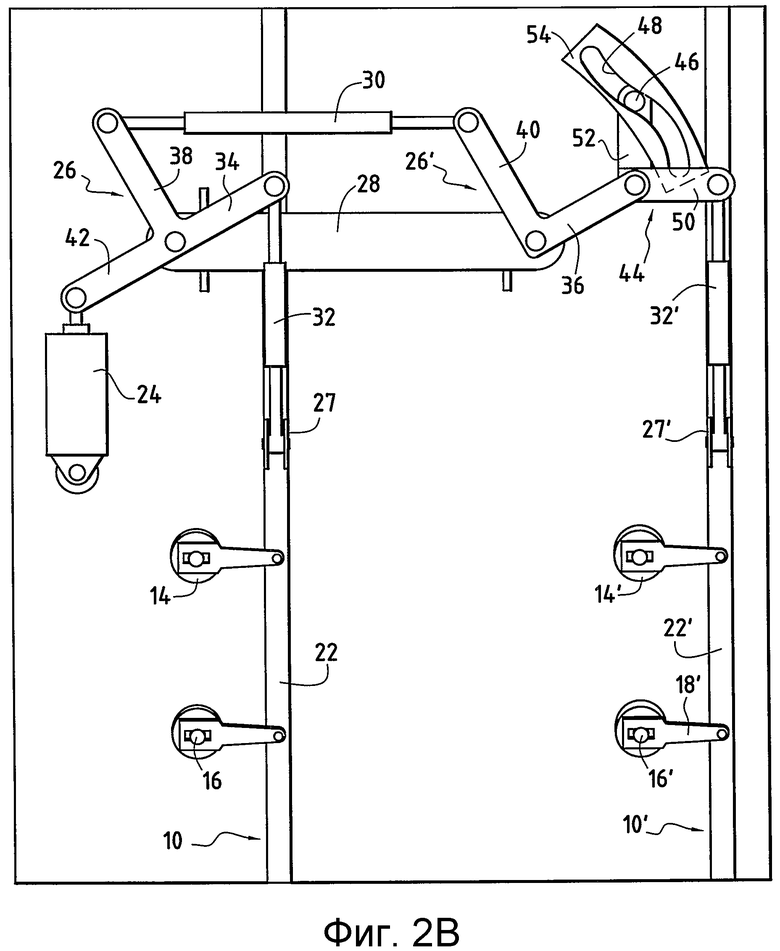
Фиг. 2А и 2В схематически изображают систему управления, показанную на Фиг.1, в двух ее различных положениях;
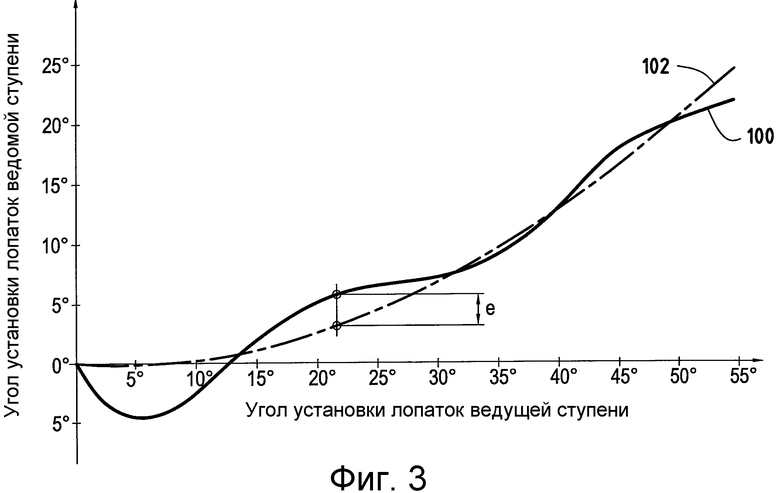
Фиг.3 изображают кривую корреляции, показывающую возможный закон изменения угла установки лопаток, полученный при помощи системы управления в соответствии с предлагаемым изобретением.
Подробное описание способа осуществления изобретения
На Фиг.1 частично представлены две ступени 10 и 10′ лопаток с изменяемым углом установки, принадлежащие, например, компрессору турбореактивного двигателя. Этот компрессор содержит кольцевую оболочку статора 12 (или кожух двигателя), которая центрирована на оси Х-Х этого турбореактивного двигателя. Ступени 10, 10′ лопаток смещены друг относительно друга на некоторое расстояние в осевом направлении.
Каждая ступень состоит из множества лопаток 14, 14′, располагающихся в радиальном направлении вокруг оси Х-Х данного турбореактивного двигателя. Лопатки 14, 14′ имеют возможность поворачиваться относительно оси 16, 16′ (или вала), которая проходит сквозь кожух двигателя 12. Каждая поворотная ось 16, 16′ лопаток с изменяемым углом установки 14, 14′ связана с концом тяги или рычага управления 18, 18′, другой конец которого шарнирно закреплен относительно пальцев 20, 20′, располагающихся в радиальном направлении на кольце управления 22, 22′.
Кольца управления охватывают кожух двигателя 12 и центрированы на продольной оси Х-Х этого турбореактивного двигателя. Синхронизированное изменение углового положения лопаток 14, 14′ реализуется, таким образом, при помощи поворота соответствующих колец управления 22, 22′ относительно продольной оси Х-Х этого турбореактивного двигателя.
Система в соответствии с предлагаемым изобретением позволяет управлять синхронизированным образом поворотом колец управления 22, 22′ относительно продольной оси Х-Х турбореактивного двигателя. Эта система имеет в своем составе приводной элемент управления 24 типа силового цилиндра, закрепленного на кожухе двигателя 12 и предназначенного для приведения во вращательное движение кольца управления 22 одной из ступеней 10 посредством ведущего органа 26 типа передаточного механизма, который установлен с возможностью поворота на корпусе 28 кожуха 12 турбореактивного двигателя.
Рычаг синхронизации 30 позволяет передать поворотное движение кольца управления 22, приводимого в движение при помощи силового цилиндра 24 (и называемого ведущим кольцом) на кольцо 22′ управления другой ступени 10′ (называемого ведомым кольцом) посредством следящего органа 26′ типа поворотного передаточного механизма, который также установлен с возможностью его поворота на корпусе 28 кожуха двигателя 12.
Рычаги управления 32, 32′ типа винтового толкателя обеспечивают передачу движения от поворотных передаточных механизмов 26 и следящего передаточного механизма 26′ на кольца управления 22, 22′. Эти рычаги управления проходят тангенциально по отношению к кольцам, на которых они закреплены посредством соединительных вилок 27, 27′. На своих противоположных концах эти рычаги 32, 32′ закреплены на соответствующих плечах (или ветвях) 34, 36 ведущего приводного механизма 26 и следящего приводного механизма 26′, соединенных с ними шарнирно.
Рычаг синхронизации 30 системы управления объединяет два других рычага соответственно 38, 40, ведущего приводного механизма 26 и следящего приводного механизма 26′, присоединенных к нему шарнирно. Что касается приводного силового цилиндра 24, то он шарнирно закреплен на третьем рычаге 42 ведущего передаточного механизма 26, противоположном рычагу 34, на котором закреплена тяга 32.
Система управления в соответствии с предлагаемым изобретением, кроме того, имеет в своем составе дополнительный поворотный орган 44 (или дополнительный передаточный механизм), который вставлен между следящим органом 26′ и ведомым кольцом управления 22′. Этот дополнительный передаточный механизм установлен с возможностью поворота на следящем передаточном механизме 26′ и связан с кожухом 12 при помощи ролика 46, скользящего в канавке 48, предусмотренной в упомянутом кожухе двигателя.
Более конкретно, дополнительный передаточный механизм 44 имеет в своем составе первое плечо 50, один конец которого связан с тягой 32′ управления ведомым кольцом управления 22′, будучи шарнирно присоединенным к этой тяге, а другой его конец установлен с возможностью поворота на следящем органе 26′. Этот дополнительный передаточный механизм содержит также второе плечо 52, один конец которого установлен с возможностью поворота на следящем органе 26′, а его противоположный конец снабжен роликом 46. Первое 50 и второе 52 плечо дополнительного передаточного механизма жестко зафиксированы друг относительно друга. Иначе говоря, угол между двумя этими плечами 50 и 52, является фиксированным и неизменным. Ролик 46 скользит в канавке 48, формирующей некоторую предварительно определенную траекторию и выполненной в кронштейне 54, который закреплен на кожухе 12 турбореактивного двигателя.
Как это можно видеть на Фиг. 2А и 2В, движение системы управления происходит следующим образом: приведение в действие силового цилиндра 24 вызывает поворот ведущего передаточного механизма 26 и поворот другого, следящего передаточного механизма 26′ посредством рычага синхронизации 30. Поворот передаточных механизмов 26 и 26′ относительно точек их вращения на кожухе двигателя 12 в свою очередь приводит в движение тяги 32 и 32′ соответственно, которые при этом заставляют поворачивать в том или другом направлении кольца управления 22 и 22′ относительно оси Х-Х турбореактивного двигателя. Как уже было сказано выше, поворот этих колец управления вызывает синхронизированное изменение углового положения лопаток 14, 14′ каждой ступени 10, 10′ посредством рычагов управления 18, 18′. В то же время, поворот следящего передаточного механизма 26′ влечет за собой поворот дополнительного передаточного механизма 44 относительно оси его вращения на следящем передаточном механизме. Вследствие этого поворота ролик 46 осуществляет скольжение в канавке 48, вызывая таким образом перемещение плеча 52 этого дополнительного передаточного механизма 44, на котором упомянутый ролик установлен. При этом перемещение упомянутого выше плеча приводит к перемещению другого плеча 50 этого дополнительного передаточного механизма, с которым связан рычаг 32′.
Понятно, таким образом, что от предварительно определенной траектории канавки 48, в которой скользит ролик 46, зависит перемещение ведомого кольца управления 22′ и, следовательно, закон изменения угла установки лопаток 14′ ведомой ступени 10′. Иначе говоря, форма и направление расположения упомянутой канавки модифицируют закон изменения угла установки лопаток ведомой ступени и, следовательно, кривую корреляции, определяющую угол установки лопаток 14′ ведомой ступени 10′ в функции угла установки лопаток 14 ведущей ступени 10.
Ниже, со ссылками на Фиг.3, будет описан способ, при помощи которого предварительно определяется форма и направление расположения канавки 48. На этой фигуре представлены кривые корреляции 100, 102, то есть кривые, определяющие угол установки лопаток 14′ ведомой ступени управления 10′ (выраженный в градусах) в функции угла установки лопаток 14 ведущей ступени управления 10 (выраженного в градусах).
Кривая корреляции 100 (изображенная сплошной линией) представляет собой кривую, которая должна быть применена к зависимости углов установки лопаток двух ступеней с тем, чтобы в полной мере отвечать аэродинамическим требованиям. Эта кривая является достаточно сложной. Она содержит, в частности, криволинейные участки, соответствующие кривым синусоидального типа.
На основе этой кривой корреляции имеется возможность выбрать номинальную кривую корреляции 102 (изображенную штрихпунктирной линией) с постепенно изменяющимся наклоном, которая является наиболее близкой к упомянутой и подлежащей применению кривой корреляции 100. Закон изменения угла установки лопаток, основанный на такой номинальной кривой, легко может быть получен при помощи системы управления, известной из существующего уровня техники и содержащей следящие и ведущие передаточные механизмы, а также рычаг синхронизации, связывающий эти механизмы между собой, в которой тяга управления ведомым кольцом связана непосредственно с одним из рычагов следящего передаточного механизма. В функции относительного положения ведущего и следящего передаточных механизмов система управления этого типа обеспечивает реализацию известных законов изменения угла установки лопаток, для которых кривые корреляции являются более или менее постепенно изменяющимися (иногда они являются линейными). При этом среди этих известных номинальных кривых корреляции выбор наиболее близкой к требуемому закону кривой осуществляется при помощи простого расчета (графического или численного) средних значений, причем кривая, имеющая наименьшие отклонения от подлежащей применению кривой во всем диапазоне возможных углов установки, рассматривается как наиболее близкая. Форма и направление расположения канавки дополнительного передаточного механизма рассчитываются при этом в функции отклонений е, существующих во всем диапазоне возможных углов установки лопаток, между подлежащей применению кривой корреляции 100 и номинальной кривой корреляции 102 таким образом, чтобы упомянутый ролик компенсировал эти отклонения. Этот расчет может быть выполнен при помощи графических или численных методов. Здесь следует отметить, что канавке, имеющей простую форму в виде дуги окружности, соответствует подлежащая применению кривая корреляции, совпадающая с выбранной номинальной кривой корреляции.
Предпочтительно, чтобы форма и направление расположения канавки дополнительного передаточного механизма были такими, чтобы они препятствовали тому, чтобы ролик, установленный на дополнительном передаточном механизме, мог оказаться на дуге окружности, таким образом, чтобы исключить любое неустойчивое положение этого ролика и, следовательно, неустойчивый угол установки лопаток.
Таким образом, система управления в соответствии с предлагаемым изобретением содержит дифференциальный направляющий элемент, интегрирующий только отклонения траектории между подлежащей применению кривой корреляции и номинальной кривой корреляции. При этом становится удобным воспроизведение закона изменения угла установки лопаток любого типа независимо от его сложности. Преимущество предлагаемого изобретения заключается, в частности, в том, что в данном случае не стремятся получить кривую корреляции путем непосредственного использования направляющего устройства кулачкового типа, но это делается путем использования ролика, который воспроизводит только отклонения траектории по отношению к номинальной кривой корреляции.
Следует отметить, что предлагаемое изобретение также может быть использовано для управления большим числом ступеней лопаток, благодаря такому же количеству рычагов синхронизации. В соответствии с выбранными конструктивными решениями эти рычаги синхронизации будут располагаться либо последовательно, т.е. будут связывать между собой смежные передаточные механизмы, либо параллельно между этими передаточными механизмами так, чтобы проходить вплоть до общего передаточного механизма.
Система управления двумя ступенями лопаток с изменяемым углом установки статора турбореактивного двигателя, содержащая приводной элемент, предназначенный для приведения во вращательное движение кольца управления одной из ступеней посредством ведущего органа, установленного на кожухе двигателя с возможностью поворота, рычаг синхронизации, предназначенный для передачи вращательного движения кольца управления, приводимого в движение приводным элементом, на кольцо управления другой ступени посредством следящего органа, установленного на кожухе двигателя с возможностью поворота, и дополнительный поворотный орган, введенный между следящим органом и ведомым кольцом управления, причем упомянутый дополнительный поворотный орган установлен с возможностью поворота на упомянутом следящем органе и связан с кожухом двигателя при помощи ролика, скользящего в канавке, жестко связанной с этим кожухом двигателя. Такое выполнение системы позволит реализовать любой тип закона изменения угла установки лопаток независимо от его сложности. 4 з.п. ф-лы, 3 ил.
1. Система управления двумя ступенями (10, 10') лопаток (14, 14') с изменяемым углом установки статора турбореактивного двигателя, причем каждая ступень (10, 10') образована множеством лопаток (14, 14'), каждая из которых установлена с возможностью поворота на кожухе (12) данного турбореактивного двигателя, и кольцом управления (22, 22'), охватывающим упомянутый кожух и связанным с каждой из лопаток (14, 14') данной ступени посредством рычагов (18, 18'), причем эта система управления содержит приводной элемент (24), предназначенный для приведения во вращательное движение кольца управления (22) одной из ступеней (10) посредством ведущего органа (26), установленного на кожухе двигателя (12) с возможностью поворота, и рычаг синхронизации (30), предназначенный для передачи вращательного движения кольца (22), приводимого в движение приводным элементом (24), на кольцо управления (22') другой ступени (10') посредством следящего органа (26'), установленного на кожухе двигателя с возможностью поворота, отличающаяся тем, что система содержит дополнительный поворотный орган (44), введенный между следящим органом (26') и ведомым кольцом управления (22'), причем упомянутый дополнительный поворотный орган установлен с возможностью поворота на упомянутом следящем органе (26') и связан с кожухом двигателя (12) при помощи ролика (46), скользящего в канавке (48), предусмотренной в кожухе двигателя.
2. Система управления по п.1, отличающаяся тем, что упомянутая канавка (48) имеет форму и направление расположения, обеспечивающие компенсацию расхождения траектории между требуемым законом изменения угла установки лопаток и номинальным законом изменения угла их установки.
3. Система управления по одному из пп.1 или 2, отличающаяся тем, что упомянутый дополнительный поворотный орган (44) содержит первое плечо (50), связанное с ведомым кольцом управления (22') посредством первой тяги управления (32'), и второе плечо (52), связанное с кожухом двигателя (12) при помощи упомянутого ролика (46).
4. Система управления по п.1, отличающаяся тем, что упомянутый следящий орган (26') содержит первый рычаг (36), связанный с возможностью поворота с упомянутым дополнительным поворотным передаточным органом (44), и второй рычаг (40), связанный с концом рычага синхронизации (30).
5. Система управления по п.4, отличающаяся тем, что упомянутый ведущий орган (26) содержит первый рычаг (34), связанный с кольцом (22) управления ведущей ступени (10) посредством второй тяги управления (32), второй рычаг (38), связанный с концом рычага синхронизации (30), противоположным тому его концу, который связан со следящим органом (26'), и третий рычаг (42), связанный с приводным элементом (24).
| FR 2856424 A1, 24.12.2004 | |||
| EP 0909880 A2, 09.10.1998 | |||
| US 3779665 A, 18.12.1973 | |||
| US 4295784 A, 20.10.1981 | |||
| СТАТОР КОМПРЕССОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1995 |
|
RU2117826C1 |
| СТАТОР МНОГОСТУПЕНЧАТОЙ ТУРБИНЫ | 1992 |
|
RU2038487C1 |

