Предлагаемое изобретение относится в целом к области управления оборудованием газотурбинного двигателя, имеющим изменяемую геометрию. Говоря более конкретно, предлагаемое изобретение относится к оптимизации управления несколькими видами оборудования, представляющего собой часть различных корпусов газотурбинного двигателя.
Здесь под выражением "оборудование с изменяемой геометрией" следует понимать оборудование, связанное с органом управления, и размер, форма, положение и/или скорость перемещения которого могут быть изменены в зависимости от выявленных событий или определенных параметров для того, чтобы воздействовать на функционирование газотурбинного двигателя. В качестве примеров такого оборудования с изменяемой геометрией можно упомянуть клапаны стравливания воздуха компрессора (с изменяемым раскрытием), фиксированные лопатки компрессора с изменяемым углом их установки, лопатки турбины, зазор на вершине которых является изменяемым, топливные насосы с изменяемым расходом и т.п.
Термин "корпус" классическим образом обозначает подсистему газотурбинного двигателя, имеющую в своем составе в качестве основных органов компрессор и турбину, собранные на одном и том же валу. Обычным образом газотурбинный двигатель может содержать один корпус высокого давления и один корпус низкого давления. Каждый корпус содержит компрессор и турбину, лопатки которых приводятся во вращательное движение относительно оси вала, на котором они установлены.
Обычно различные корпусы газотурбинного двигателя выполняются с возможностью функционировать независимо друг от друга. Скорости их вращения являются независимыми друг от друга даже в том случае, если они могут быть связаны или сопоставлены в некоторых режимах функционирования.
Также обычным образом, вследствие упомянутой независимости между различными корпусами газотурбинного двигателя, для управления оборудованием с изменяемой геометрией, составляющим часть различных корпусов турбореактивного двигателя, для этих различных видов оборудования предусматривают различные системы управления. По этим соображениям управление двумя видами оборудования с изменяемой геометрией для двух различных корпусов обычно требует использования двух контуров управления двух приводов, двух источников мощности и т.п. Из этого следует, что масса, стоимость и габаритные размеры такой системы управления оборудованием оказываются относительно большими. Такая конфигурация представляет собой конфигурацию, зафиксированную в заявке на европейский патент, поданной на имя Заявителя и опубликованной под номером ЕР 1724474.
Например, ступень низкого давления может содержать один или несколько клапанов стравливания воздуха (часто обозначаемых VBV, которая представляет собой аббревиатуру их английского названия "Variable Bleed Valve"), тогда как ступень высокого давления может содержать одну или несколько ступеней лопаток статора с изменяемым углом установки (часто обозначаемых VSV, которая представляет собой аббревиатуру их английского названия "Variable Stator Vanes"). Для снижения массы этого оборудования и его органов управления может быть рассмотрен вариант отказа от установки VBV. Если реализованная таким образом экономия является существенной (вследствие этого исключается использование приводов, сервоклапанов, трубопроводов, электропроводки и т.д., которые связаны с этим оборудованием), то возникающие риски являются значительными, в частности, в режиме малого газа, если вода или град проникают в двигатель, вызывая повышенную опасность самовыключения газотурбинного двигателя.
В патентной заявке FR 2445439 на имя фирмы General Electric Company описано единственное средство, предназначенное для управления клапанами стравливания воздуха из ступени низкого давления и ступеней статора с изменяемым углом установки лопаток корпуса высокого давления, однако это средство обеспечивает управление двумя видами оборудования в основном последовательным образом, причем только лопатки статора приводятся в движение в процессе штатного функционирования газотурбинного двигателя (то есть функционирования на режиме, превышающем режим малого газа).
Техническая задача данного изобретения состоит в том, чтобы предложить газотурбинный двигатель, имеющий в своем составе оборудование с изменяемой геометрией, принадлежащее различным корпусам этого газотурбинного двигателя, и оптимизированную систему управления этим оборудованием.
Так, например, предлагаемое изобретение относится к системе управления по меньшей мере двумя видами оборудования с изменяемой геометрией, используемого в газотурбинном двигателе, причем данный газотурбинный двигатель содержит по меньшей мере один первый корпус, вращающийся на первой скорости, и один второй корпус, вращающийся на второй скорости, причем первый вид такого оборудования представляет собой ступень лопаток статора с изменяемым углом установки компрессора первого корпуса, меняющимся между закрытым положением в режиме малого газа и открытым положением в режиме большой мощности и второй вид оборудования представляет собой по меньшей мере один клапан стравливания воздуха из компрессора второго корпуса, изменяющейся между открытым положением в режиме малого газа и закрытым положением в режиме большой мощности, отличающейся тем, что эта система управления содержит один привод, который приводит в движение оба упомянутых вида оборудования.
Используя один единственный привод для управления несколькими (по меньшей мере двумя) видами оборудования с изменяемой геометрией, такая система управления позволяет уменьшить количество деталей газотурбинного двигателя и достичь, таким образом, цели, поставленной в предлагаемом изобретении. В этом случае масса, объем и стоимость второй системы управления устраняются, по меньшей мере частично, поскольку оборудование первого и второго корпусов приводится в действие при помощи одного и того же привода.
В соответствии с одной из форм реализации предлагаемая система управления выполнена с возможностью управлять более, чем двумя видами оборудования с изменяемой геометрией при помощи одного единственного привода.
В соответствии с одной из форм реализации оборудование с изменяемой геометрией является общим для нескольких корпусов газотурбинного двигателя.
В соответствии с одной из форм реализации, поскольку первый корпус приводится в движение с управляемой скоростью вращения, привод управляется при помощи скорости вращения этого первого корпуса.
Таким образом, оборудование второго корпуса управляется при помощи скорости вращения первого корпуса посредством привода.
В соответствии со специфической формой реализации первый корпус представляет собой корпус высокого давления и второй корпус представляет собой корпус низкого давления.
В частности, поскольку газотурбинный двигатель имеет в своем составе компрессор низкого давления и компрессор высокого давления, оборудование с изменяемой геометрией компрессора низкого давления управляется при помощи скорости вращения компрессора высокого давления.
В соответствии с одной из форм реализации и в случае газотурбинного двигателя, имеющего в своем составе компрессор высокого давления и компрессор низкого давления, оборудование с изменяемой геометрией корпуса высокого давления располагается в непосредственной близости от корпуса низкого давления (например, в непосредственной близости от передней по потоку стороны корпуса высокого давления).
В соответствии со специфической формой реализации в этом случае газотурбинный двигатель представляет собой двухкорпусный газотурбинный двигатель, имеющий корпус высокого давления и корпус низкого давления. Предпочтительным образом в этом случае одна или несколько ступеней лопаток статора с изменяемым углом установки составляют часть корпуса высокого давления, причем первый вид оборудования, управляемого при помощи предлагаемой системы управления, представляет собой часть корпуса низкого давления данного газотурбинного двигателя.
В соответствии со специфической формой реализации в этом случае ступень лопаток содержит множество лопаток, каждая из которых устанавливается с возможностью поворота на кожухе газотурбинного двигателя, и кольцо управления, охватывающее кожух и связанное с каждой из лопаток ступени при помощи рычагов, причем привод имеет возможность приводить во вращательное движение это кольцо управления ступени посредством управляющего органа, установленного на кожухе.
В соответствии с одной из форм реализации оборудование с изменяемой геометрией представляет собой клапан стравливания воздуха из газотурбинного двигателя. Это оборудование может содержать один клапан или несколько клапанов стравливания воздуха. Здесь речь идет, например, о клапане типа VBV стравливания воздуха на уровне компрессора низкого давления.
Система управления в соответствии с предлагаемым изобретением может быть адаптирована для управления различными видами оборудования. Кроме оборудования представленных выше видов, оборудование с изменяемой геометрией, в частности, может содержать или формировать элемент одного или нескольких следующих устройств:
- клапан стравливания воздуха из компрессора высокого давления с пропорциональным раскрытием (часто обозначаемый аббревиатурой TBV, которая соответствует английскому выражению "Trnsient Bleed Valve", или аббревиатурой SBV, которая соответствует английскому выражению "Start Bleed Valve");
- клапан стравливания воздуха из компрессора высокого давления двухпозиционного типа (часто обозначаемый аббревиатурой HBV, которая соответствует английскому выражению "Handling Bleed Valve");
- клапан регулирования расхода воздуха, для контроля зазора в турбине низкого давления (часто обозначаемый аббревиатурой LPTACC, которая соответствует английскому выражению "Low Pressure Turbine Active Clearance Control"), или в турбине высокого давления (часто обозначаемый аббревиатурой HPTACC, которая соответствует английскому выражению "High Pressure Turbine Active Clearance Control").
В соответствии с одной из форм реализации в предлагаемой системе управления привод содержит подвижный орган управления, перемещение которого передает управляющее воздействие на оборудование с изменяемой геометрией. Орган управления может содержать, например, шток силового цилиндра.
В соответствии с одной из форм реализации приводной механизм выполнен таким образом, чтобы приводить в движение первое оборудование с изменяемой геометрией, изменяя некоторый параметр в диапазоне действия этого первого оборудования, причем привод выполнен таким образом, чтобы приводить в движение второе оборудование с изменяемой геометрией, изменяя тот же параметр в диапазоне действия этого второго оборудования.
Упомянутый выше параметр привода может представлять собой, например, положение органа приведения в движение этого привода. Таким образом, этот параметр может представлять собой положение конца штока силового цилиндра. Таким образом, в этом случае изменение этого параметра означает перемещение конца штока силового цилиндра или положения действующего конца привода.
В соответствии с одной из форм реализации привод обеспечивает приведение в движение передаточного механизма, содержащего по меньшей мере две ветви и установленного с возможностью перемещения на кожухе газотурбинного двигателя, причем первая ветвь этого механизма приводит в движение первое оборудование, а вторая ветвь приводит в движение второе оборудование.
В соответствии со специфической формой реализации вторая ветвь приводит во вращательное движение на некоторой части своего рабочего хода деталь приведения в движение второго оборудования и не приводит в движение эту деталь на остальной части своего рабочего хода, причем упомянутая деталь остается в положении покоя на упоре.
В соответствии со специфической формой реализации упомянутая деталь приведения в движение представляет собой рычаг, имеющий возможность перемещаться относительно оси вращения, связанной с кожухом, причем первое плечо рычага предназначено для взаимодействия с упомянутой второй ветвью и с упомянутым упором, и второе плечо рычага приводит в движение второе оборудование посредством органа скользящего соединения, образующего холостой ход в приведении в действие упомянутого второго оборудования.
В том случае, когда параметр приведения в движение изменяется в интервале, располагающемся за пределами диапазона приведения оборудования в движение, это оборудование не приводится в движение приводом. Такой интервал величин параметра привода, в котором никакое воздействие эффективно не оказывается к рассматриваемому оборудованию, образует для упомянутого оборудования так называемый "холостой ход". В таком диапазоне, при любых изменениях упомянутого параметра, привод не оказывает воздействия (или не оказывает незначительное воздействие) на рассматриваемое оборудование.
В соответствии со специфической формой реализации упомянутый орган скользящего соединения содержит первый орган управления, представляющий удлиненное отверстие, в котором скользит стержень, закрепленный на втором органе управления.
В соответствии со специфической формой реализации ось вращения рычага имеет возможность перемещаться вдоль первого плеча упомянутого рычага.
В соответствии со специфической формой реализации первый орган управления отводится при помощи упругого средства в положение, соответствующее отсутствию взаимодействия между второй ветвью и деталью приведения в движение.
В соответствии со специфической формой реализации, по меньшей мере, часть диапазона приведения в движение первого оборудования располагается за пределами диапазона приведения в движение второго оборудования.
Управление при помощи одного единственного привода двумя видами оборудования с изменяемой геометрией может быть облегчено вследствие того обстоятельства, что диапазоны приведения в движение двух видов оборудования не совпадают полностью, что позволяет, за пределами общей зоны, приводить в движение только один вид оборудования.
В соответствии со специфической формой реализации диапазон приведения в движение только одного вида оборудования из двух, первого и второго, видов этого оборудования полностью содержится в диапазоне приведения в движение другого вида оборудования.
В этом случае все виды оборудования приводятся в движение одновременно в их общей зоне, что может представлять преимущества в зависимости от характера этого оборудования. Такая форма реализации может обеспечить возможность использования более значительной амплитуды приведения в движение.
В соответствии со специфической формой реализации в этом случае диапазон приведения в движение одного из видов оборудования имеет амплитуду, значительно меньшую, чем полная амплитуда диапазона приведения в движение другого вида оборудования; например, она может составлять менее 20% или менее 10% от этого диапазона. Таким образом, в том случае, когда диапазон приведения в движение одного вида оборудования с уменьшенным диапазоном приведения в движение включен в диапазон приведения в движение другого вида оборудования, управляющие воздействия оборудованием вызывают лишь незначительные и/или малозаметные изменения в управлении другим видом оборудования. Такое техническое решение облегчает управление двумя видами оборудования при помощи одной единственной системы управления.
Система управления предпочтительно выполняется таким образом, чтобы изменения параметра привода между границами его диапазона приведения в движение были достаточными для приведения оборудования в движение с достаточной амплитудой.
В соответствии с одной из форм реализации связь между приводным механизмом и одним из видов оборудования содержит устройство расцепления, имеющее возможность отключать приведение в движение этого оборудования при помощи приводного механизма на некотором диапазоне величин параметра приведения в движение. Таким образом, этот диапазон величин располагается за пределами диапазона приведения в движение рассматриваемого вида оборудования. Таким образом, это устройство расцепления позволяет сохранить интервал диапазона приведения в движение единым также и для управления другим или другими видами оборудования. Это может оказаться главным в том случае, когда рассматриваемое оборудование не должно быть затронуто даже тогда, когда управление одним из других видов управляемого оборудования изменяется.
В соответствии с одним из способов реализации предлагаемая система управления дополнительно содержит возвратные средства, поддерживающие орган управления одного из видов оборудования в предварительно определенном положении, по меньшей мере в том случае, когда параметр привода изменяется в интервале, располагающемся за пределами диапазона приведения этого вида оборудования в движение.
Предлагаемое изобретение также относится к газотурбинному двигателю, оборудованному представленной выше системой управления.
Предлагаемое изобретение будет лучше понято из приведенного ниже описания предпочтительной формы реализации газотурбинного двигателя и системы управления в соответствии с этим изобретением, со ссылками на приведенные в приложении чертежи, на которых:
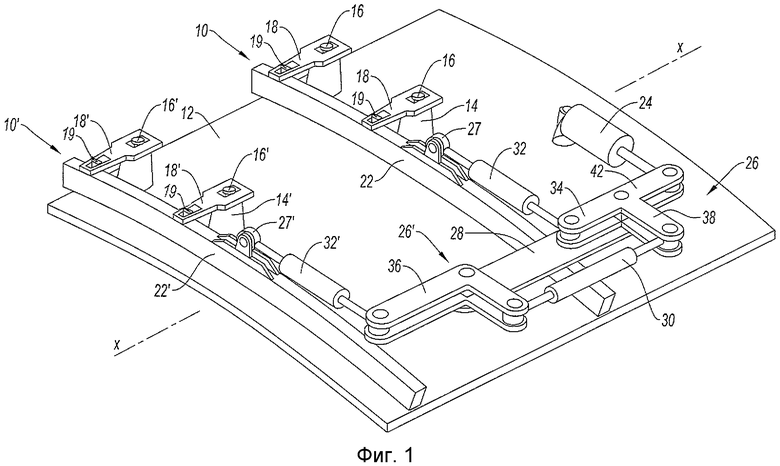
- Фиг.1 представляет собой вид в изометрии системы управления положением лопаток статора с изменяемым углом установки в соответствии с существующим уровнем техники;
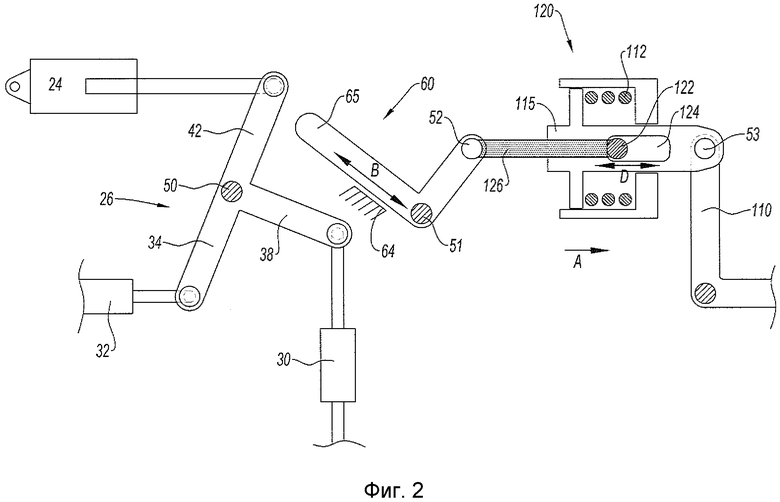
- Фиг.2 представляет собой схематический вид устройства управления клапанами стравливания воздуха из компрессора, исходя из управления положением лопаток статора с изменяемым углом установки в соответствии с одним из способов реализации предлагаемого изобретения; на этой фигуре данное устройство представлено в положении, соответствующем высокой скорости вращения двигателя (лопатки статора находятся в открытом положении, клапаны стравливания воздуха находятся в закрытом положении);
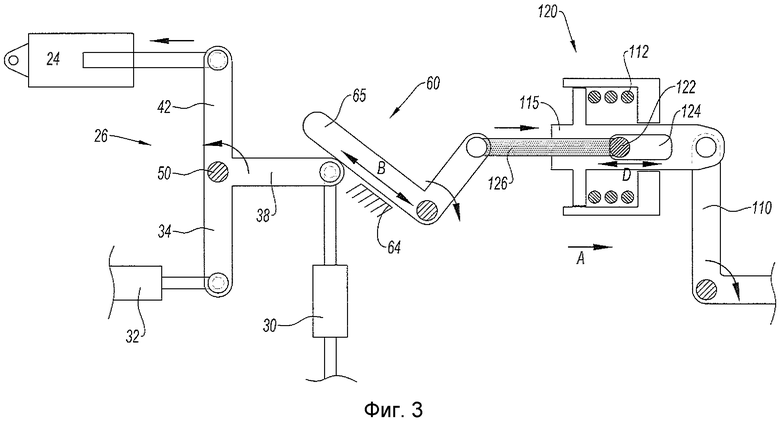
- Фиг.3 представляет собой схематический вид того же устройства, но при средней скорости вращения двигателя, причем лопатки статора находятся в процессе закрытия, а клапаны стравливания воздуха продолжают оставаться закрытыми;
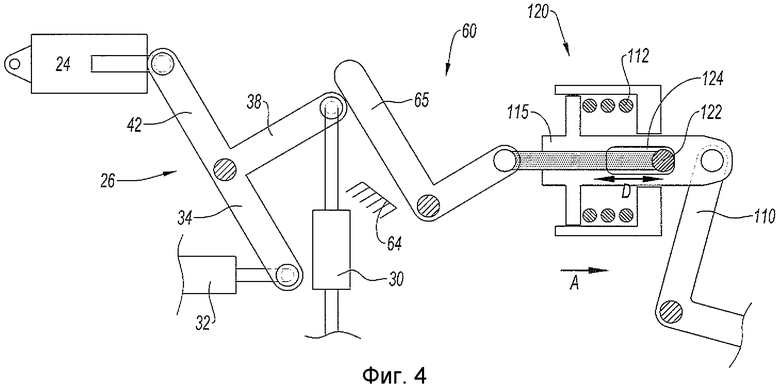
- Фиг.4 представляет собой схематический вид того же устройства, но при малой скорости вращения двигателя, причем лопатки статора находятся в закрытом положении, а клапаны стравливания воздуха находятся в открытом положении;
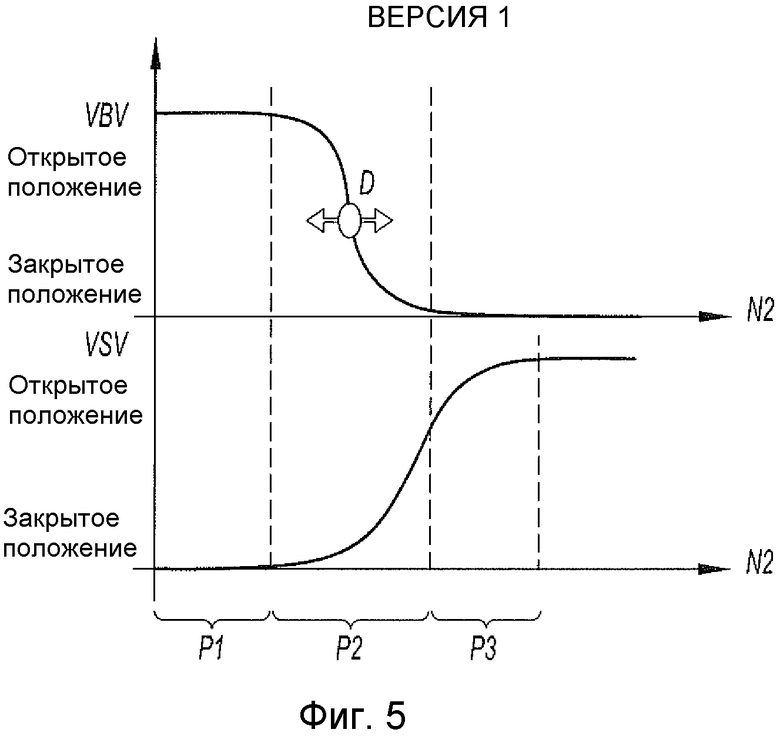
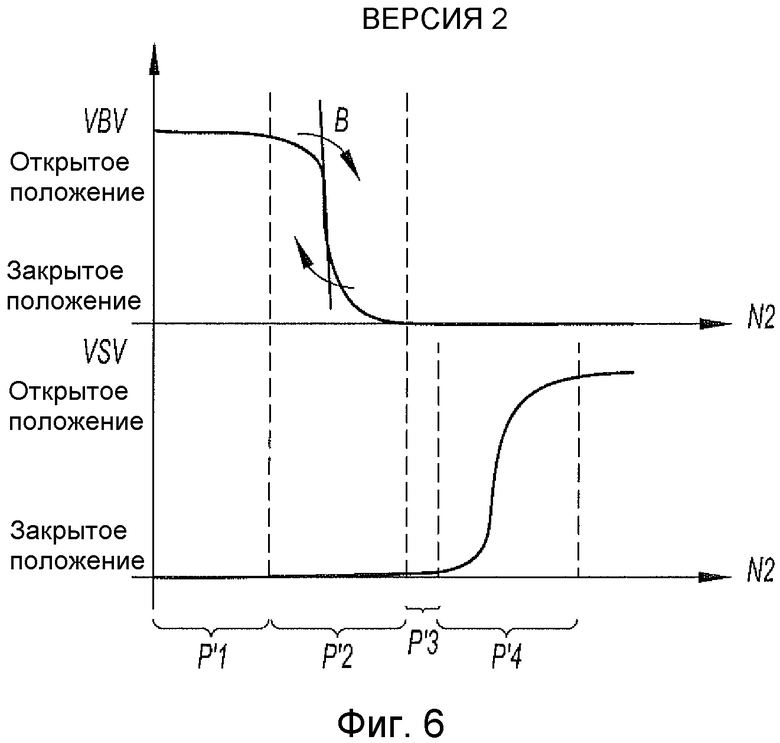
- Фиг.5 и 6 представляют собой кривые, иллюстрирующие положение лопаток статора и клапанов стравливания воздуха в зависимости от режима работы двигателя в случае перекрытия и в случае отсутствия перекрытия диапазонов открытия и закрытия двух этих видов оборудования.
Известным образом газотурбинный двигатель, имеющий здесь ось Х-Х, содержит располагающиеся последовательно, если смотреть по потоку, вентилятор, компрессор низкого давления (часто обозначаемый специалистами в данной области техники термином "усилитель"), компрессор высокого давления, камеру сгорания, турбину высокого давления, турбину низкого давления и реактивное сопло выброса газов (на приведенных в приложении фигурах не показаны). Компрессор и турбина высокого давления закреплены на одном и том же так называемом валу высокого давления и принадлежат, таким образом, к корпусу высокого давления газотурбинного двигателя, тогда как компрессор и турбина низкого давления также закреплены на одном и том же так называемом валу низкого давления и принадлежат, таким образом, к корпусу низкого давления газотурбинного двигателя.
В последующем изложении будут использоваться аббревиатуры ВР для низкого давления и НР для высокого давления.
Компрессор НР высокого давления содержит по меньшей мере одну ступень, образованную колесом подвижных лопаток и колесом неподвижных лопаток (называемых также лопатками статора). Каждая ступень образована множеством лопаток, располагающихся в радиальном направлении вокруг оси Х-Х газотурбинного двигателя. В данном случае компрессор НР содержит несколько ступеней с чередованием колес с подвижными лопатками и колес с неподвижными лопатками. Эти лопатки охвачены оболочкой в виде цилиндрического кожуха 12, который центрирован на оси Х-Х газотурбинного двигателя.
Среди колес с неподвижными лопатками по меньшей мере одна ступень 10 содержит так называемые лопатки 14 с изменяемым углом установки. Каждая лопатка 14 устанавливается с возможностью поворота относительно оси (или стержень) 16, который проходит сквозь кожух 12. Угловое положение каждой лопатки 14 может быть отрегулировано путем приведения во вращательное движение ее стержня 16.
Ступень 10 лопаток с изменяемым углом установки образует первый вид оборудования с изменяемой геометрией, принадлежащего корпусу НР (поскольку эта ступень принадлежит компрессору НР). Изменяемый параметр этого оборудования представляет собой угол лопаток 14; в данном случае все лопатки 14 одновременно приводятся во вращательное движение при помощи кольца 22 управления ступени 10 лопаток 14.
Кольцо 22 управления имеет в целом круглую форму; это кольцо охватывает кожух 12 и центрировано на оси Х-Х газотурбинного двигателя. Синхронизированное изменение углового положения лопаток 14 обеспечивается, таким образом, путем поворота кольца 22 управления относительно оси Х-Х газотурбинного двигателя, как это известно из существующего уровня техники.
Газотурбинный двигатель содержит также второй вид оборудования 110 с изменяемой геометрией. В данном случае речь идет о клапане стравливания воздуха типа VBV (здесь этот клапан представлен схематическим образом). Изменяемый параметр этого оборудования 110 представляет собой угол открытия клапана 110 стравливания воздуха. Это оборудование 110 принадлежит корпусу ВР газотурбинного двигателя. Функция этого клапана 110 VBV состоит в стравливании воздуха на выходе из компрессора ВР низкого давления для того, чтобы уменьшить опасность ненадлежащего функционирования этого компрессора в том случае, когда он функционирует в специфических условиях.
Разумеется, известным образом второй вид оборудования 110 может содержать несколько таких клапанов.
Система управления выполнена таким образом, чтобы управлять вращением кольца 22 управления ступени 10 лопаток с изменяемым углом установки (первый вид оборудования 10), а также перемещением органа 115 управления второго вида оборудования 110.
Для этого система управления содержит приводной механизм 24, в данном случае силовой цилиндр 24, который механически связан с первым видом оборудования 10 и с вторым видом оборудования 110 для приведения этого оборудования в движение. Единственный приводной механизм 24 управляет, таким образом, двумя видами оборудования 10, 110 с изменяемой геометрией в двух различных корпусах.
Для этого каждый стержень 16 лопаток 14 с изменяемым углом установки связан с одним концом рычага 18 или тяги 18 управления, второй конец которого шарнирно связан с пальцем 19, который закреплен на кольце 22 управления и проходит в радиальном направлении по отношению к этому кольцу.
Упомянутое кольцо содержит по меньшей мере одну втулку 27, в которой закреплен один конец тяги 32 управления типа винтового талрепа, проходящий по существу тангенциально по отношению к кольцу 22. Другой конец тяги 32 рычага управления жестко связан с так называемым ведущим передаточным органом 26 (поскольку он непосредственно связан с приводом 24), установленным с возможностью поворота на корпусе 28 кожуха 12 газотурбинного двигателя. Этот ведущий передаточный орган 26, говоря более конкретно, имеет Т-образную форму. Тяга 32 управления закреплен на одном конце первой ветви 34 передаточного органа Т-образной конструкции, причем конец штока силового цилиндра 24 закреплен шарнирным образом на конце ветви 42 приведения в движение этой Т-образной конструкции, которая располагается в продолжении первой ветви 34. Вторая ветвь 38, располагающаяся перпендикулярно к двум другим ветвям, выполняет другую функцию, которая будет описана далее. Ведущий передаточный орган 26 устанавливается с возможностью поворота относительно оси 50, проходящей через точку пересечения упомянутых ветвей.
Привод (силовой цилиндр) 24 имеет возможность приводить во вращательное движение кольцо 22 управления ступенью 10 лопаток с изменяемым углом установки посредством ведущего передаточного органа 26, который передает движение силового цилиндра 24 на рычаг 32 управления, который сам, в свою очередь, передает это движение на кольцо 22, с которым он связан в поступательном перемещении (криволинейном).
Ведущий передаточный орган 26 и тяга 32 представляют собой главные элементы цепи передачи движения от приводного механизма (силового цилиндра 24) до кольца 22 управления.
Силовой цилиндр 24 управляется при помощи электронного блока управления. Движения штока этого силового цилиндра представляют собой функцию скорости N2 вращения компрессора НР.
Предлагаемое изобретение выше было представлено с одной единственной ступенью лопаток с изменяемым углом установки, но, разумеется, может быть выполнено с несколькими такими ступенями, причем эти ступени классическим образом связаны с первым, так называемым ведущим, передаточным органом 26 и с так называемыми ведомыми передаточными органами 26', приводимыми в движение при помощи стержня 30 синхронизации.
Система управления также обеспечивает управление перемещением органа 115 управления вторым видом оборудования 110 при помощи специфического устройства.
На фиг.2-4 можно видеть устройство 60 приведения в движение клапанов стравливания воздуха при помощи системы управления лопатками статора с изменяемым углом установки. Передаточный орган 26, который имеет возможность вращательного движения относительно оси 50, вызывает перемещение рычага 32 при помощи своей первой ветви 34 и перемещение стержня синхронизации 30 при помощи своей второй ветви 38; этот передаточный орган также приводит в движение деталь 65 приведения в движение посредством своей ветви 38. Эта деталь 65 приведения в движение выполнена в виде рычага L-образной формы и имеет возможность вращательного движения относительно первой оси 51, связанной с кожухом 12. Эта деталь постоянно испытывает возвратное воздействие со стороны упругого возвратного средства, не показанного на приведенных в приложении фигурах, в направлении второй ветви 38 и опирается, в случае отсутствия взаимодействия с ветвью 38, на упор 64. Одно из плеч этого рычага имеет возможность взаимодействовать с упомянутой второй ветвью 38 для того, чтобы передавать вращательное движение передаточного органа 26 на скобу 126, имеющую U-образную форму, которая связана со вторым плечом детали 65 при помощи второго шарнирного соединения 52. Вращение передаточного органа 26 преобразуется в продольное перемещение скобы 126, которая перемещается по типу рычага, движущегося в направляющей.
Две ветви скобы 126 проходят по одну и по другую стороны от первого органа 115 управления с изменяемой геометрией 110, который управляет перемещениями оборудования 110 с изменяемой геометрией вдоль направления, указанного стрелкой А. Этот орган 115 управления представляется в виде прямоугольной пластины, в которой выполнено удлиненное отверстие 124. Две ветви скобы 126, образующие второй орган, предназначенный для управления вторым видом оборудования 110, связаны при помощи стержня 122, который проходит сквозь удлиненное отверстие 124 и скользит в этом отверстии.
Скоба 126 и стержень 122 образуют скользящий орган соединения 120. Привод 24 обеспечивает приведение в движение второго вида оборудования 110 через этот скользящий соединительный орган 120, скольжение которого определяет холостой ход D. Действительно, поскольку стержень 122 перемещается внутри удлиненного отверстия 124 без того, чтобы быть заблокированным на конце этого отверстия, это не влечет за собой никакого движения органа 115 управления или, говоря другими словами, движения привода (силового цилиндра 24) не вызывают никакого движения органа 115 управления оборудованием 110.
В отсутствие воздействия со стороны передаточного органа 26 на деталь 65 приведения в движение пружина 112 отталкивает орган 115 управления и поддерживает второй вид оборудования 110 в положении, соответствующем закрытому положению клапанов стравливания воздуха. Эта возвратная пружина детали 65 заставляет эту деталь вращаться относительно оси второго шарнирного соединения 52 вплоть до ее опоры на упор 64, который ограничивает вращение этой детали приведения в движение в направлении закрытия лопаток статора. Затем эта деталь удерживается в состоянии опоры на упор 64 при помощи упомянутого выше упругого возвратного средства.
И, наконец, деталь 65 приведения в движение имеет, как это представлено на фиг.2-4, L-образную форму, два плеча которой соединяются между собой на уровне первой оси 51 вращения. Длина первого плеча этой детали, то есть длина того плеча, которое взаимодействует с ветвью 38 передаточного органа 26, может быть уменьшена путем перемещения точки, в которой эта деталь закреплена на оси вращения. Эффектом этого перемещения является модификация понижающего передаточного отношения движения, существующего между вращательным движением передаточного органа 26 и перемещением скобы 126. Амплитуда этой модификации понижающего передаточного отношения определяется при помощи рабочего хода В, вдоль которого может перемещаться ось 51 вращения.
На фиг5 и 6 проиллюстрированы законы относительного открытия лопаток с изменяемыми углами установки (обозначаемых VSV) и клапанов стравливания воздуха (обозначаемых VBV) в зависимости от скорости N2 вращения корпуса НР. При этом, чем более значительной является величина на кривой, тем в большей степени соответствующее оборудование 10, 110 с изменяемой геометрией является открытым. Здесь открытое положение лопаток VSV 14 соответствует положению, в котором эти лопатки пропускают наиболее значительный поток воздуха в компрессор 3 НР; открытое положение клапанов 110 VBV соответствует положению, в котором эти клапаны отбирают максимальный расход воздуха из компрессора ВР.
В первой фазе Р1, на низком режиме работы двигателя, клапаны 110 VBV стравливания воздуха находятся в открытом положении, тогда как лопатки 14 VSV с изменяемым углом установки находятся в закрытом положении. Во второй фазе Р2, на промежуточном режиме работы двигателя, клапаны 110 VBV постепенно закрываются по мере возрастания скорости N2 вращения корпуса НР, тогда как лопатки 14 VSV постепенно открываются по мере возрастания скорости N2 вращения корпуса НР; в конце этой второй фазы Р2 клапаны 110 VBV оказываются практически полностью закрытыми, тогда как лопатки 14 VSV открыты примерно на две трети. В третьей фазе Р3 закрытие клапанов 110 VBV завершается, тогда как открытие лопаток 14 VSV постепенно приходит к своему завершению по мере возрастания скорости N2 вращения корпуса НР.
Таким образом, два вида оборудования 10, 110 с изменяемой геометрией управляются при помощи режима работы корпуса НР высокого давления. В частности, клапаны 110 VBV, принадлежащие корпусу ВР, управляются при помощи скорости N2 вращения корпуса НР. Следствием этого обстоятельства является упрощение определения законов открытия и гарантия удовлетворительной синхронизации между открытием и закрытием оборудования с изменяемой геометрией, поскольку эти открытия и закрытия зависят от одного и того же и единственного параметра: скорости N2 вращения корпуса НР.
В версии V1, представленной на фиг.5, открытие лопаток VSV с изменяемым углом установки начинается в тот же момент времени, что и закрытие клапанов VBV стравливания воздуха, но завершается после закрытия этих клапанов, тогда как в версии V2, представленной на фиг.6, это открытие лопаток с изменяемым углом установки начинается только после закрытия клапанов стравливания воздуха. Выбор версии и точного момента, когда начинается закрытие клапанов стравливания воздуха, определяются путем воздействия на положение и на длину D удлиненного отверстия 124. Увеличение или сокращение протяженности этого удлиненного отверстия смещает, в том или ином направлении, открытие клапанов стравливания воздуха по отношению к закрытию лопаток с изменяемым углом установки.
Как об этом уже было сказано выше, изменение позиционирования первой оси 51 вращения на первом плече детали 65 приведения в движение в пределах рабочего хода В вызывает изменение понижающего передаточного отношения движения, порождаемого вращением передаточного органа 26. Сокращение длины плеча L-образного рычага увеличивает вращение детали 65 приведения в движение для заданного поворота передаточного органа 26, что выражается в более быстром открытии клапанов стравливания воздуха и в более вертикальном положении касательной в точке перегиба кривой VBV, показанной на фиг.6. И наоборот, удлинение плеча рычага на первом плече детали 65 приведения в движение будет давать менее вертикальную касательную в точке перегиба кривой, показанной на фиг.6, и более постепенное открытие клапанов стравливания воздуха.
Для того, чтобы лучше понять функционирование системы 1 управления, на фиг.2-4 проиллюстрировано движение этой системы в трех различных положениях, соответствующих максимальному, промежуточному и минимальному выдвижению штока силового цилиндра 24. В системе 1 управления выдвижение штока силового цилиндра 24 представляет собой параметр приведения в движение этого привода.
Теперь будет описано функционирование лопаток статора и клапанов стравливания воздуха в процессе изменения скорости N2 вращения корпуса НР, принимая для примера торможение двигателя от положения максимального газа. В исходной ситуации (см. фиг.2) силовой цилиндр находится в положении максимального выдвижения штока; при этом лопатки 14 с изменяемым углом установки находятся в открытом положении и клапаны стравливания воздуха находятся в закрытом положении. Ветвь 38 передаточного органа 26 удалена от первого плеча детали 65 приведения в движение, которая опирается на упор 64 под действием упругого возвратного средства этой детали 65. Пружина 112 удерживает орган 115 управления в положении, соответствующем закрытому положению клапанов стравливания воздуха.
Исходя из этого положения, приведение в действие силового цилиндра 24 вызывает поворот ведущего передаточного органа 26 и, в случае необходимости, поворот ведомого передаточного органа 26', приводимого в движение при помощи стержня 30 синхронизации. Поворот передаточного органа 26 относительно точки его вращения на кожухе 28 в свою очередь приводит в движение тягу 32, которая при этом заставляет поворачиваться в том или ином направлении кольцо 22 относительно оси Х-Х газотурбинного двигателя. Как об этом уже было сказано выше, поворот кольца 22 вызывает синхронизированное изменение углового положения лопаток 14 ступени 10 посредством рычагов 18 управления.
Поскольку скорость вращения двигателя уменьшается, передаточный орган 26 поворачивается вплоть до того момента, когда его вторая ветвь 38 войдет в контакт с первым плечом детали 65 приведения в движение, как это проиллюстрировано на фиг.3, который соответствует специфическому положению в процессе втягивания штока силового цилиндра 24.
Поскольку шток силового цилиндра 24 продолжает втягиваться и дальше, передаточный орган 26 начинает поворачивать деталь 65 приведения в движение относительно ее оси 51 вращения и толкать вследствие этого стержень 122 скобы 126 в удлиненном отверстии 124 в направлении, показанном стрелкой А. Положение, представленное на фиг.3, является специфическим в том смысле, что оно точно соответствует тому моменту, когда стержень 122, жестко связанный со скобой 126, входит в упор в конец отверстия 124 в направлении, показанном стрелкой А (которое представляет собой направление приведения в движение для органа 115 управления), то есть положение, начиная с которого стержень 122 начинает приводить в движение орган управления (пластину 115) с изменяемой геометрией 110. Или, наоборот, говоря другими словами, от начала втягивания штока силового цилиндра 24 и вплоть до этого положения орган 115 управления не перемещается из своего исходного положения (см. фиг.2), несмотря на перемещение скобы 126. Также диапазон приведения в движение силового цилиндра 24 между его исходным положением (см. фиг.2) и специфическим промежуточным положением, показанным на фиг.3, образует холостой ход D для второго вида управляемого оборудования 110. В процессе этого движения клапаны статора постепенно закрываются, тогда как клапаны стравливания воздуха остаются полностью закрытыми.
Зато, исходя из положения начала приведения в движение, показанного на фиг.3, любое дополнительное втягивание штока силового цилиндра 24 приводит стержень 122, жестко связанный со скобой 126, к проталкиванию органа 115 управления в направлении стрелки А и вызывает перемещение этого органа управления. Положения штока силового цилиндра 24 с втягиванием этого штоком в большей степени, чем в упомянутом положении, образуют диапазон приведения в движение второго вида оборудования 110. Соответственно клапаны стравливания воздуха при этом открываются. Это открытие осуществляется более или менее постепенно в зависимости от регулировки В, принятой для длины плеча рычага детали 65 приведения в движение.
Кроме того, здесь дополнительно следует отметить, что после того, как шток силового цилиндра 24 преодолеет это положение начала приведения в движение, пружина 112 начинает действовать в качестве возвратного средства для того, чтобы поддерживать орган 115 управления в постоянном контакте со стержнем 122. Таким образом, за пределами упомянутого холостого хода орган 115 управления в каждый момент времени следует за перемещениями стержня 122 как в направлении стрелки А, так и в противоположном направлении. И, наоборот, при холостом ходе скользящего органа 120 соединения орган 115 управления остается заблокированным в положении "слева" на фиг.2 и 3, под действием упругого возвратного средства детали 65 приведения в движение.
Поскольку скорость вращения двигателя продолжает снижаться, силовой цилиндр управляется в направлении полного втягивания его штока, что соответствует полностью открытому положению клапанов стравливания воздуха и продолжению процесса закрытия лопаток статора вплоть до их полного закрытия (положение, проиллюстрированное на фиг.4).
В направлении увеличения скорости N2 вращения, начиная с режима малого газа, шток силового цилиндр 24 выдвигается и заставляет поворачиваться передаточный орган 26 в направлении, обратном предыдущему направлению. Под действием своего упругого возвратного средства деталь 65 приведения в движение возвращается в направлении своего упора 64, увлекая за собой скобу 126. Поскольку орган 115 управления больше не подвергается давлению со стороны стержня 122, он под действием пружины 112 сопровождает скобу 126 в ее перемещении, что вызывает закрытие клапанов стравливания воздуха. Движение органа 115 управления продолжается вплоть до того момента, когда пружина 112 будет полностью расслаблена, после чего стержень 122, по-прежнему приводимый в движение при помощи упругого возвратного средства детали приведения в движение, проходит через удлиненное отверстие 124 вплоть до вхождения в упор в другой конец этого отверстия. Сборка, образованная деталью 65 приведения в движение, скобой 126 и органом 115 управления, продолжает свой рабочий ход вплоть до того момента, когда первое плечо детали 65 приведения в движение натолкнется на упор 64.
В этом положении клапаны стравливания воздуха оказываются полностью закрытыми. Что касается лопаток статора, то их открытие продолжается с вращением передаточного органа 26, движение которого, начиная с этого момента, больше не взаимодействует с движением клапанов стравливания воздуха.
Хотя предлагаемое изобретение было описано выше в связи с несколькими специфическими способами его реализации, должно быть совершенно очевидно, что это изобретение ни в коем случае не ограничивается этими способами и что оно включает все технические эквиваленты описанных выше средств, а также комбинации этих средств, если они не выходят за рамки предлагаемого изобретения.
Система управления по меньшей мере двумя видами оборудования с изменяемой геометрией, используемого в газотурбинном двигателе, причем данный газотурбинный двигатель содержит по меньшей мере один первый корпус и один второй корпус, и первый вид такого оборудования представляет собой ступень лопаток статора с изменяемым углом установки в компрессоре первого корпуса, изменяющимся между закрытым положением в режиме малого газа и открытым положением в режиме большой мощности, а второй вид оборудования представляет собой по меньшей мере один клапан стравливания воздуха из компрессора второго корпуса, состояние которого изменяется между его открытым положением в режиме малого газа и его закрытым положением в режиме большой мощности. Приводной механизм приводит в движение второй вид оборудования посредством детали приведения в движение, которая приводится в движение на некоторой части рабочего хода приводного механизма и находится в состоянии покоя на упоре на остальной части этого рабочего хода, и посредством скользящего соединительного органа, реализующего холостой ход в приведении в движение упомянутого второго оборудования. Технический результат - оптимизация системы управления оборудованием с изменяемой геометрией газотурбинного двигателя. 2 н. и 8 з.п. ф-лы, 6 ил.
1. Система управления по меньшей мере двумя видами оборудования (10, 110) с изменяемой геометрией, используемого в газотурбинном двигателе, причем данный газотурбинный двигатель содержит по меньшей мере один первый корпус и один второй корпус, причем первый вид оборудования (10) представляет собой ступень лопаток статора с изменяемым углом установки в компрессоре первого корпуса, изменяющимся между закрытым положением в режиме малого газа и открытым положением в режиме большой мощности, а второй вид оборудования (110) представляет собой, по меньшей мере, один клапан стравливания воздуха из компрессора второго корпуса, изменяющегося между открытым положением в режиме малого газа и закрытым положением в режиме большой мощности, причем эта система управления дополнительно содержит привод (24), приводящий в движение передаточный орган (26), содержащий по меньшей мере две ветви и установленный с возможностью перемещения на кожухе (12) газотурбинного двигателя, причем первая ветвь (34) приводит в движение первое оборудование (10), а вторая ветвь (38) приводит в движение второе оборудование (110), отличающаяся тем, что упомянутая вторая ветвь (38) приводит во вращательное движение на некоторой части своего рабочего хода деталь (65) приведения в движение второго оборудования (110) и не приводит эту деталь в движение на остальной части своего рабочего хода, причем упомянутая деталь (65) остается в положении покоя на упоре (64).
2. Система управления по п.1, в которой первый корпус представляет собой корпус высокого давления и второй корпус представляет собой корпус низкого давления.
3. Система управления по п.1, в которой привод (24) управляется при помощи частоты вращения одного из корпусов газотурбинного двигателя.
4. Система управления по п.3, в которой привод (24) управляется при помощи частоты вращения корпуса высокого давления.
5. Система управления по п.4, в которой деталь (65) приведения в движение представляет собой рычаг, выполненный с возможностью перемещаться вокруг оси (51) вращения, связанной с кожухом (12), причем первое плечо этого рычага предназначено для взаимодействия с упомянутой второй ветвью (38) и с упомянутым упором (64) и второе плечо этого рычага приводит в движение второе оборудование (110) посредством органа (120) скользящего соединения, формирующего холостой ход в приведении в движение упомянутого второго оборудования.
6. Система управления по п.5, в которой орган (120) скользящего соединения содержит первый орган (115) управления, представляющий удлиненное отверстие (124), в котором скользит стержень (122), закрепленный на втором органе (126) управления.
7. Система управления по п.5, в которой ось (51) вращения рычага (65) выполнена с возможностью перемещаться вдоль первого плеча упомянутого рычага.
8. Система управления по п.6, в которой первый орган (115) управления отводится при помощи упругого средства (112) в положение, соответствующее отсутствию взаимодействия между второй ветвью (38) и деталью (65) приведения в движение.
9. Система управления по п.4, в которой диапазон приведения в движение второго вида оборудования (110) заключен внутри диапазона функционирования первого вида оборудования (10).
10. Газотурбинный двигатель, содержащий систему управления в соответствии с одним из приведенных выше пунктов.
| Интегральный тензопреобразователь | 1983 |
|
SU1224563A1 |
| БУРОВАЯ КОРОНКА | 2010 |
|
RU2445439C1 |
| Пористая форма для изготовления керамических изделий | 1990 |
|
SU1724472A1 |
| ЕР 1398464 А, 17.03.2004 | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Пневматическая шина для высоконагруженных машин | 2015 |
|
RU2633046C1 |
| СИСТЕМА ПОДАЧИ ТОПЛИВА В ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ С РЕВЕРСИВНЫМ УСТРОЙСТВОМ | 1989 |
|
SU1646208A1 |
| RU 2005129854 A, 10.04.2007. | |||

