Мультимодульный быстродействующий поляризованный двухпозиционный электромагнит с поворотным якорем предназначен для использования в промышленных и бытовых технических объектах, содержащих исполнительные органы, которые обеспечивают заданные динамические характеристики. Изобретение относится к области электротехники.
Известен поляризованный электромагнит (DE 102004037360 А1), содержащий якорь, жестко связанный с исполнительным механизмом, два постоянных магнита, расположенных в крайних положениях движения якоря, а также торсионную пружину или иной механизм с аналогичной силовой характеристикой, который удерживает якорь в нейтральном положении. Одна из предлагаемых в патенте конструкций электромагнита содержит четырехполюсный магнитопровод, двухполюсный якорь с общей обмоткой управления.
Недостатком является то, что такое решение значительно снижает развиваемый электромагнитом момент и, следовательно, увеличивает время его переключения. При ограниченных размерах электромагнита это может оказаться существенным недостатком.
Известен быстродействующий двухпозиционный электромагнит с поворотным якорем, содержащий шихтованный магнитопровод с немагнитными фланцами и с явно выраженными полюсами, обмотку управления и шихтованный четырехполюсный якорь с явно выраженными полюсами, который жестко связан с торсионной пружиной, закрепленной на одном немагнитном фланце и свободно проходящей через другой фланец, и установленный с возможностью поворота в межполюсном пространстве магнитопровода, а переключение якоря из одного положения в другое осуществляется с помощью одной обмотки управления (патент РФ №2261495).
Недостаток данного технического решения заключается в том, что для переключения якоря и удержания его в крайних положениях обмотка управления должна быть постоянно подключена к источнику питания, что ведет к росту энергопотребления электромагнита и тепловыделения в нем.
Задачей изобретения является снижение энергопотребления электромагнита и обеспечение заданного быстродействия и скорости перемещения подвижного элемента при ограниченных габаритных размерах электромагнита в одном из измерений.
Поставленная задача решается с помощью мультимодульного быстродействующего поляризованного двухпозиционного электромагнита с поворотным якорем, каждый модуль которого содержит магнитопровод с немагнитными фланцами и с явно выраженными полюсами, обмотки управления и четырехполюсный якорь с явно выраженными полюсами, жестко связанный с торсионной пружиной, закрепленной на одном немагнитном фланце и свободно проходящей через другой фланец, и установленный с возможностью поворота в межполюсном пространстве магнитопровода, причем магнитопровод состоит из двух пластин с крепежными отверстиями, между пластинами магнитопровода установлены постоянные магниты и немагнитные распорные втулки, четырехполюсный якорь выполнен с магнитными шунтами в виде выступов, с возможностью объединения конструкции в единый модуль, несколько таких модулей путем жесткого крепления якорей на торсионной пружине объединяются в мультимодульный электромагнит.
На фигуре 1 представлен мультимодульный быстродействующий поляризованный двухпозиционный электромагнит с поворотным якорем.
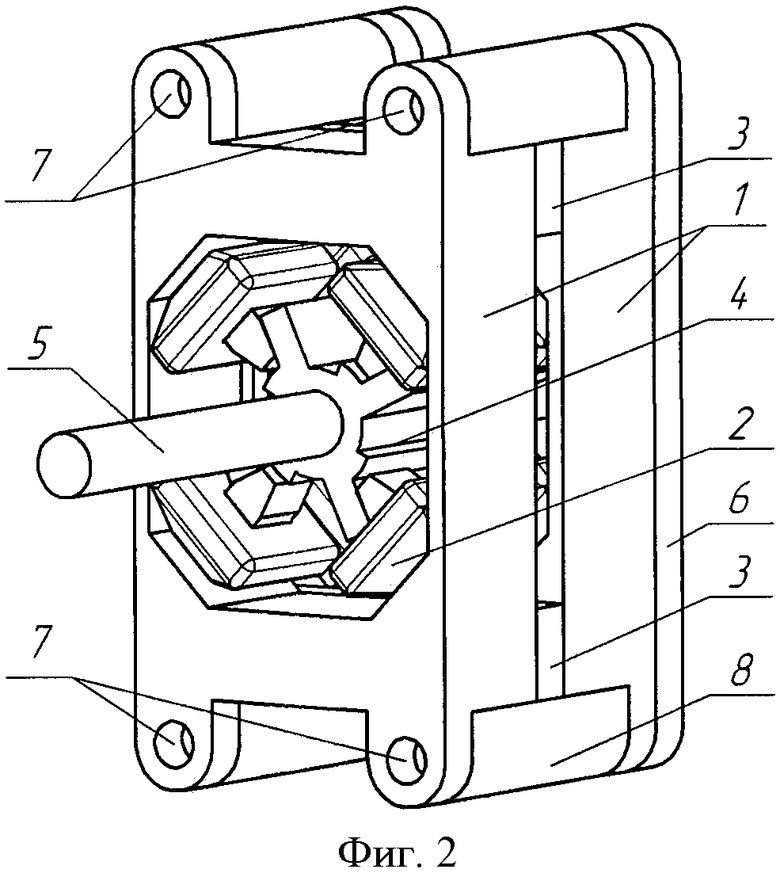
На фигуре 2 представлен модуль быстродействующего поляризованного электромагнитного механизма с поворотным якорем.
На фигуре 3 представлен фрагмент магнитной системы с магнитным потоком, замыкающимся через постоянный магнит.
Мультимодульный быстродействующий поляризованный двухпозиционный электромагнит с поворотным якорем содержит магнитопровод 1, состоящий из пластин, выполненных из магнитомягкого материала с явно выраженными полюсами, на которых расположены обмотки управления 2, постоянные магниты 3, задающие поляризующий магнитный поток, замыкающийся через магнитопровод 1, и один из соответствующих полюсов четырехполюсного якоря 4 с явно выраженными полюсами и магнитными шунтами в виде выступов, совершающего поворот в межполюсном пространстве магнитопровода 1 на жестко связанной с ним торсионной пружине 5, которая закреплена на одном немагнитном фланце 6 и свободно вращается в другом. Через крепежные отверстия 7 в магнитпроводе 1 и распорных немагнитных втулках 8 осуществляется сборка модуля электромагнита. Второй фланец, стоящий перед модулем 1, через который проходит торсионная пружина, на фигуре 1 не показан.
Мультимодульный быстродействующий поляризованный двухпозиционный электромагнит с поворотным якорем работает следующим образом. В исходном состоянии обмотки управления 2 обесточены, а четырехполюсные якоря 4 притянуты, например, к правым сторонам соответствующих полюсов магнитопроводов 1. Удержание четырехполюсных якорей 4 в таком состоянии обеспечивается электромагнитной силой, создаваемой поляризующим потоком постоянных магнитов 3, которая превышает силу, создаваемую торсионной пружиной 5, действующей в противоположном направлении. Для переключения электромагнита в обмотки управления 2 подается импульс тока с такими параметрами, чтобы возникающий при этом размагничивающий поток уменьшил удерживающую электромагнитную силу ниже значения силы, созданной торсионной пружиной 5. Четырехполюсные якоря 4 отрываются от полюсов магнитопроводов 1 и под действием торсионной пружины 5 начинают поворачиваться. После прохождения четырехполюсными якорями 4 нейтрального положения подается управляющий сигнал, создающий магнитный поток, согласный с поляризующим потоком постоянных магнитов 3, и под суммарным действием сил инерции и электромагнитного момента четырехполюсные якоря 4 оказываются притянутыми к противоположной левой стороне полюсов магнитопроводов 1. При приближении четырехполюсных якорей 4 к левой стороне полюсов магнитопроводов 1 параметры импульса тока выбираются такими, чтобы обеспечить переход четырехполюсных якорей 4 в крайнее положение с требуемой скоростью подвижной части в конце хода. В крайнем положении четырехполюсные якоря 4 вновь удерживаются у полюсов магнитопроводов 1 за счет электромагнитной силы, создаваемой поляризующим потоком постоянных магнитов 3. Для возврата четырехполюсных якорей 4 в исходное положение в обмотки управления 2 подается размагничивающий импульс тока с параметрами, необходимыми для обеспечения отрыва четырехполюсных якорей 4, и процесс повторяется аналогично описанному выше.
Параметры импульсов тока в обмотках управления 2 могут изменяться электронным коммутатором в соответствии с сигналами датчика положения четырехполюсных якорей 4 или задаваться постоянными исходя из требуемых параметров электромагнитного механизма.
Магнитный поток постоянных магнитов 3 замыкается по пути, показанном на фигуре 2, и обеспечивает независимую работу каждой пары полюсов магнитопроводов 1. Число полюсов электромагнита определяется необходимым углом поворота якоря и может быть равным двум, трем, четырем и т.д. В аналоге для создания магнитного потока, определяющего суммарный электромагнитный момент, участвуют два полюса магнитопровода и два полюса якоря, т.е. число полюсов должно быть четным.
Положительный эффект от предлагаемого технического решения заключается в том, что удержание якоря в крайних положениях обеспечивается без дополнительных затрат энергии за счет магнитного потока, создаваемого постоянным магнитом. Для переключения якоря в обмотки управления подается короткий импульс тока, что значительно снижает среднюю мощность, потребляемую электромагнитом. Поскольку при переключении электромагнита используется принцип резонанса механической системы, то время переключения tпер составляет половину периода собственной частоты системы
 ,
,
где J - суммарный момент инерции якоря и механизма, которым управляет ЭМ;
ϕк - предельный угол поворота якоря, относительно его нейтрального положения;
М - момент, созданный торсионной пружиной при угле поворота ϕк.
Для удержания якоря в крайних положениях (угол поворота = ± ϕк) электромагнитный момент Мэл должен превышать момент М. Следовательно, при росте момента инерции J необходимо увеличивать момент Мэл. Предложенная модульная конструкция электромагнита позволяет за счет установки на общем якоре нескольких модулей наращивать результирующий момент Мэл∑ без увеличения размеров электромагнита в плоскости, перпендикулярной оси вращения якоря.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЫСТРОДЕЙСТВУЮЩИЙ ДВУХПОЗИЦИОННЫЙ ЭЛЕКТРОМАГНИТ С ПОВОРОТНЫМ ЯКОРЕМ | 2003 |
|
RU2261495C1 |
| ОДНОКАТУШЕЧНЫЙ БЫСТРОДЕЙСТВУЮЩИЙ ПОЛЯРИЗОВАННЫЙ ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД С ПРЯМОХОДОВЫМ ЯКОРЕМ | 2008 |
|
RU2374545C1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ПОЛЯРИЗОВАННЫЙ ЭЛЕКТРОМАГНИТ БРОНЕВОГО ТИПА С НЕЗАВИСИМЫМИ ПОТОКАМИ ПОЛЯРИЗАЦИИ | 2002 |
|
RU2242816C2 |
| ДВУХСТОРОННИЙ ПОЛЯРИЗОВАННЫЙ ЭЛЕКТРОМАГНИТ С ПАССИВНЫМ УДЕРЖАНИЕМ ШТОКА | 2016 |
|
RU2634423C1 |
| ПОЛЯРИЗОВАННЫЙ ЭЛЕКТРОМАГНИТНЫЙ МЕХАНИЗМ БРОНЕВОГО ТИПА | 2002 |
|
RU2215162C1 |
| ПОЛЯРИЗОВАННЫЙ ЭЛЕКТРОМАГНИТ С ПАССИВНЫМ УДЕРЖАНИЕМ ШТОКА | 2016 |
|
RU2634424C1 |
| Поляризованный электромагнит | 1981 |
|
SU1065895A1 |
| ПОЛЯРИЗОВАННЫЙ ЭЛЕКТРОМАГНИТ | 2004 |
|
RU2298243C2 |
| Поляризованный электромагнит | 2019 |
|
RU2713626C1 |
| ПОЛЯРИЗОВАННЫЙ ДВУСТАБИЛЬНЫЙ ДЛИННОХОДОВОЙ ЭЛЕКТРОМАГНИТ СО СДВОЕННОЙ ПОСЛЕДОВАТЕЛЬНОЙ МАГНИТНОЙ ЦЕПЬЮ | 2018 |
|
RU2683575C1 |

Изобретение относится к области электротехники. Техническим результатом является снижение энергопотребления, обеспечение заданного быстродействия и скорости перемещения подвижного элемента при ограниченных габаритных размерах электромагнита в одном из измерений. Каждый модуль электромагнита содержит магнитопровод с явно выраженными полюсами и немагнитными фланцами, обмотки управления и четырехполюсный якорь с явно выраженными полюсами, жестко связанный с торсионной пружиной, которая закреплена на одном немагнитном фланце магнитопровода и свободно проходит через другой, и установлен с возможностью поворота в межполюсном пространстве магнитопровода. Магнитопровод состоит из двух пластин, немагнитных распорных втулок и постоянных магнитов, установленных между пластинами магнитопровода, причем в пластинах магнитопровода и немагнитных распорных втулках выполнены крепежные отверстия. Четырехполюсный якорь выполнен с магнитными шунтами в виде выступов, все модули объединены путем жесткого крепления четырехполюсных якорей на общей торсионной пружине. 3 ил.
Мультимодульный быстродействующий поляризованный двухпозиционный электромагнит с поворотным якорем, каждый модуль которого содержит магнитопровод с явно выраженными полюсами и немагнитными фланцами, обмотки управления и четырехполюсный якорь с явно выраженными полюсами, жестко связанный с торсионной пружиной, которая закреплена на одном немагнитном фланце магнитопровода и свободно проходит через другой, и установленный с возможностью поворота в межполюсном пространстве магнитопровода, отличающийся тем, что магнитопровод состоит из двух пластин, немагнитных распорных втулок и постоянных магнитов, установленных между пластинами магнитопровода, причем в пластинах магнитопровода и немагнитных распорных втулках выполнены крепежные отверстия, четырехполюсный якорь выполнен с магнитными шунтами в виде выступов, все модули объединены путем жесткого крепления четырехполюсных якорей на общей торсионной пружине.
| БЫСТРОДЕЙСТВУЮЩИЙ ДВУХПОЗИЦИОННЫЙ ЭЛЕКТРОМАГНИТ С ПОВОРОТНЫМ ЯКОРЕМ | 2003 |
|
RU2261495C1 |
| ЭЛЕКТРОМАГНИТ | 0 |
|
SU396730A1 |
| Электромагнитное поворотное устройство | 1979 |
|
SU838937A1 |
| ПОВОРОТНЫЙ ЭЛЕКТРОМАГНИТ | 0 |
|
SU359704A1 |
| Поворотный электромагнит | 1980 |
|
SU1022227A1 |
| US 3435394 A, 25.03.1969 | |||
| DE 4409503 A1, 29.09.1994 | |||
| GB 1244981 A, 02.09.1971. | |||

