Изобретение относится к подъемно-транспортному оборудованию и может быть использовано на грузоподъемных машинах прерывного действия, предназначенных для перемещения людей с инструментом и материалами и проведения работ в пределах зоны обслуживания.
Известно устройство для подвески и контроля массы рабочей платформы подъемника, содержащее горизонтируемую опорную площадку в виде рамы и четыре опоры для крепления рабочей платформы на опорной площадке, при этом каждая опора выполнена в виде горизонтально расположенного силовоспринимающего элемента, концы которого соединены, соответственно, с опорной площадкой и рабочей платформой, и каждый силовоспринимающий элемент имеет собственный измерительный участок, оснащенный тензометрическим преобразователем (см. патент РФ №2140060, G01G 19/02, 20.10.1999, фиг.6). Данная конструкция имеет повышенную защиту тензометрических преобразователей от внешних атмосферных воздействий за счет введения двух втулок, закрывающих снаружи силовоспринимающий элемент, однако это существенно усложняет конструкцию, затрудняет сборку опор и регулировку данного устройства.
Известно также устройство для подвески и контроля массы рабочей платформы подъемника, содержащее опорную площадку и четыре опоры для крепления платформы на опорной площадке, при этом каждая опора выполнена в виде силовоспринимающей балки, концы которой жестко соединены, соответственно, с опорной площадкой и платформой, и каждая силовоспринимающая балка имеет собственный измерительный участок, оснащенный тензометрическими преобразователями, измеряющими изгибную деформацию балки (см. патент США №4573542, МКИ G01G 19/52, G01G 3/14, НКИ 177/132, 04.03.1986). При использовании данной конструкции необходимо выполнить два взаимоисключающих требования: для повышения точности измерения массы необходимо иметь достаточно гибкую силовоспринимающую балку, а для повышения надежности в эксплуатации и обеспечения достаточного запаса прочности необходимо увеличивать толщину силовоспринимающей балки в ущерб точности контроля массы платформы. Кроме того, данная конструкция обладает недостаточной защищенностью тензометрических преобразователей от внешних воздействий, причем обеспечить повышенную защиту тензометрических преобразователей сложно, так как любая защита потребует введения дополнительных элементов в конструкцию опоры платформы либо радикального изменения конструкции опоры.
Наиболее близким к заявляемому изобретению по совокупности существенных признаков является устройство для подвески и контроля массы рабочей платформы подъемника, содержащее установленный на оголовке стрелы подъемника с возможностью плоскопараллельного перемещения силовоспринимающий элемент, связанный с основанием рабочей платформы через силопередающие узлы, снабженные тензометрическими преобразователями, регистрирующими деформацию сдвига (см. патент РФ на полезную модель №58521, В66С 13/16, G01G 3/14, 27.11.2006). В данном устройстве силоизмерительные датчики являются опорами для крепления рабочей платформы на опорной площадке. Количество опор, с помощью которых рабочая платформа крепится на горизонтируемой опорной площадке, определяется проектировщиком, но оно не может быть меньше трех, так как плоскость может быть задана, по меньшей мере, тремя точками. При этом с точки зрения удобства проектирования и расчетов целесообразно иметь четыре опоры, что усложняет конструкцию данного устройства и регулировку системы контроля массы рабочей платформы в процессе эксплуатации.
Задачей настоящего изобретения является разработка эффективного и простого в эксплуатации устройства для подвески и контроля массы рабочей платформы подъемника, обеспечивающего достаточно высокую точность контроля массы рабочей платформы при уменьшенных затратах на изготовление, которое легко можно установить на существующих подъемниках.
Таким образом, достигаемый технический результат выражается в повышении надежности устройства и снижении трудоемкости монтажа устройства на подъемнике.
Для достижения поставленных задач и других преимуществ предложено устройство для подвески и контроля массы рабочей платформы подъемника, содержащее установленный на оголовке стрелы подъемника с возможностью плоскопараллельного перемещения силовоспринимающий элемент, связанный с основанием рабочей платформы через силопередающие узлы, снабженные тензометрическими преобразователями, регистрирующими деформацию сдвига, в котором силовоспринимающий элемент оголовка стрелы подъемника и основание рабочей платформы связаны между собой с помощью двух параллельных и разнесенных друг относительно друга силопередающих узлов, выполненных в виде силоизмерительных датчиков рамочного типа, с торцевым креплением к силовоспринимающему элементу подъемника и основанию рабочей платформы с помощью резьбовых крепежных элементов, при этом каждый из указанных силоизмерительных датчиков рамочного типа включает в себя две параллельные, расположенные одна над другой и симметрично разнесенные относительно продольной оси датчика силовоспринимающие балки, каждая из которых выполнена в виде бруса с прямоугольным поперечным сечением и имеет собственный измерительный участок, на котором в боковых стенках силовоспринимающей балки выполнены встречно направленные несквозные выемки, разделенные тонкой вертикальной силоизмерительной перегородкой, на которой закреплен собственный тензометрический преобразователь, регистрирующий деформацию сдвига, и два вертикальных элемента, соединяющих между собой концевые части силовоспринимающих балок с образованием силоизмерительной рамки, в которых выполнены гнезда под указанные резьбовые крепежные элементы.
Предпочтительно, каждый тензометрический преобразователь содержит два тензорезистора, расположенные под прямым углом друг к другу и под углом 45° к силовоспринимающей балке, причем тензорезисторы верхних и нижних силовоспринимающих балок силоизмерительной рамки образуют один измерительный мост с четырьмя активными сопротивлениями. Предпочтительно, в каждой силоизмерительной рамке силовоспринимающие балки и вертикальные элементы выполнены за одно целое в виде параллелепипеда с полостью в вертикальной боковой стенке.
Предпочтительно, силоизмерительная рамка выполнена с выступами на торцевых поверхностях, в которых выполнены указанные гнезда под резьбовые крепежные элементы.
Предпочтительно, каждый силоизмерительный датчик снабжен блоком обработки сигналов с тензометрических преобразователей, установленным в полости силоизмерительной рамки.
Предпочтительно, силоизмерительная рамка оснащена крышками, изолирующими полость рамки и несквозные выемки от воздействия внешней среды, при этом блок обработки сигналов с тензометрических преобразователей закреплен на одной из указанных крышек.
В основу изобретения положено соединение силовоспринимающего элемента оголовка стрелы подъемника с основанием рабочей платформы с помощью двух параллельных и разнесенных друг относительно друга силопередающих узлов, выполненных в виде силоизмерительных датчиков рамочного типа, с торцевым креплением к силовоспринимающему элементу подъемника и основанию рабочей платформы с помощью резьбовых крепежных элементов, что упрощает в целом конструкцию устройства для подвески рабочей платформы подъемника и существенно упрощает регулировку системы контроля массы рабочей платформы в процессе эксплуатации. При этом сохраняются несущие возможности рабочей платформы и работоспособность подвески с контролем массы рабочей платформы при любых перемещениях подъемника и любых перемещениях оператора на рабочей платформе без использования параллелограммного механизма.
Силоизмерительный датчик, в котором каждый тензометрический преобразователь содержит два тензорезистора, расположенные под прямым углом друг к другу и под углом 45° к силовоспринимающей балке, причем тензорезисторы верхних и нижних силовоспринимающих балок силоизмерительной рамки образуют один измерительный мост с четырьмя активными сопротивлениями, обеспечивает постоянство выходного сигнала силоизмерительной системы независимо от положения груза на рабочей платформе и перемещений оператора.
Выполнение в каждой силоизмерительной рамке силовоспринимающих балок и вертикальных элементов за одно целое в виде параллелепипеда с полостью в вертикальной боковой стенке упрощает конструкцию силоизмерительного датчика и технологию его изготовления.
Выполнение силоизмерительной рамки с выступами на торцевых поверхностях, в которых выполнены гнезда под резьбовые крепежные элементы, обеспечивает плотное прилегание силоизмерительного датчика к силовоспринимающему элементу оголовка стрелы подъемника и основанию рабочей платформы и отсутствие паразитных деформаций силоизмерительной рамки при ее монтаже.
Снабжение каждого силоизмерительного датчика блоком обработки сигналов с тензометрических преобразователей, установленным в полости силоизмерительной рамки, дает возможность изготовить моноблочный силоизмерительный датчик с минимальным расстоянием между тензометрическими преобразователями и блоком обработки сигналов, уменьшив тем самым влияние внешних помех на сигнал, снимаемый с тензометрических преобразователей. При этом сам силоизмерительный датчик представляет собой автономную ячейку, в которой размещены тензометрические преобразователи и блок обработки сигнала, что обеспечивает возможность одновременной защиты их от воздействия внешней среды.
Оснащение силоизмерительной рамки крышками обеспечивает надежную защиту от внешних условий тензометрических преобразователей, блока обработки сигналов и соединительных проводов.
Закрепление блока обработки сигналов с тензометрических преобразователей на одной из указанных крышек упрощает технологию изготовления силоизмерительного датчика рамочного типа.
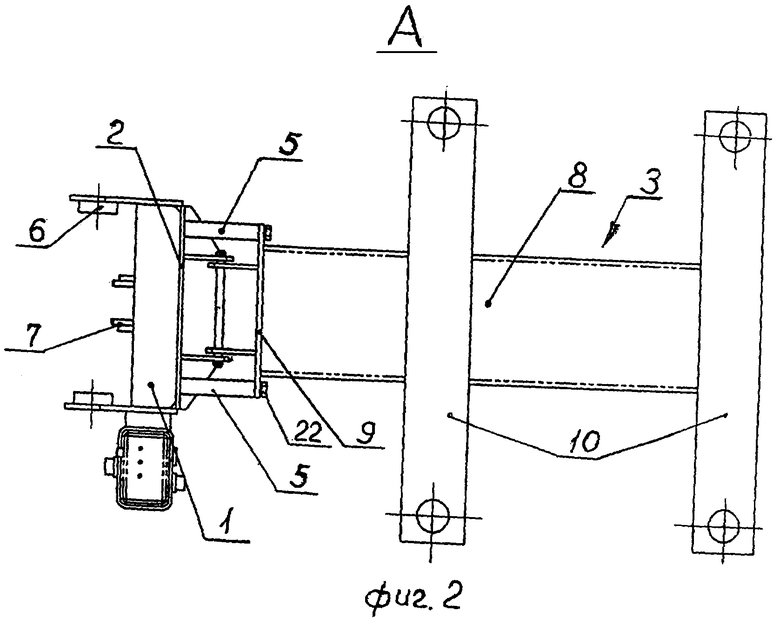
На фиг.1 показано предлагаемое устройство для подвески рабочей платформы на стреле подъемника, вид сбоку; на фиг.2 - вид А на фиг.1 (без рабочей платформы); на фиг.3 - силоизмерительный датчик в увеличенном масштабе; на фиг.4 и 5 - сечения Б-Б и В-В на фиг.3; на фиг.6 - размещение блока обработки сигналов с тензометрических преобразователей; на фиг.7 - схема соединения тензометрических преобразователей в измерительный мост.
Устройство для подвески рабочей платформы на стреле подъемника содержит установленный на оголовке 1 стрелы подъемника силовоспринимающий элемент 2, связанный с основанием 3 рабочей платформы 4 с помощью двух параллельных и разнесенных друг относительно друга силопередающих узлов, выполненных в виде силоизмерительных датчиков 5 рамочного типа, с торцевым креплением к силовоспринимающему элементу подъемника и основанию рабочей платформы с помощью резьбовых крепежных элементов.
Оголовок 1 стрелы подъемника выполнен с элементами 6 и 7 для шарнирного соединения, соответственно, с концом стрелы и со штоком гидропривода (на чертеже не показан) системы горизонтирования основания рабочей платформы. Такое соединение обеспечивает плоскопараллельное перемещение силовоспринимающего элемента 2 и, соответственно, основания 3 рабочей платформы в процессе работы подъемника.
Основание 3 рабочей платформы выполнено в виде кронштейна 8, снабженного силопередающим элементом 9 и двумя балками 10, на которых закреплена рабочая платформа 4 с помощью четырех опор 11. Как правило, для крепления рабочей платформы на опорной площадке используют узел соединения с электроизолирующими втулками.
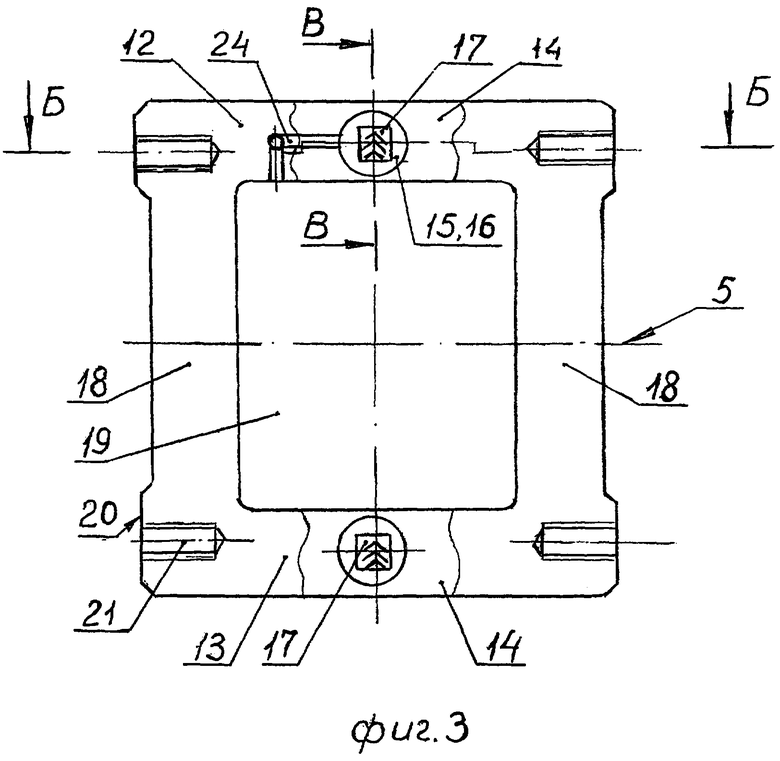
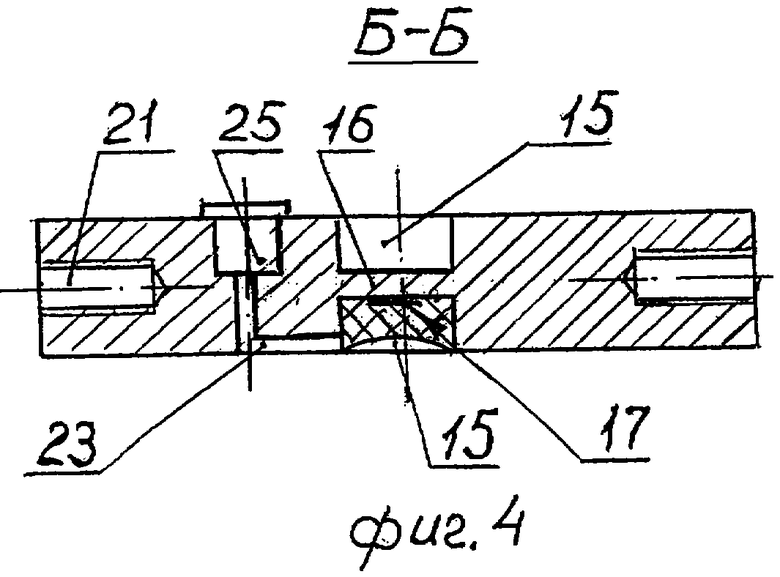
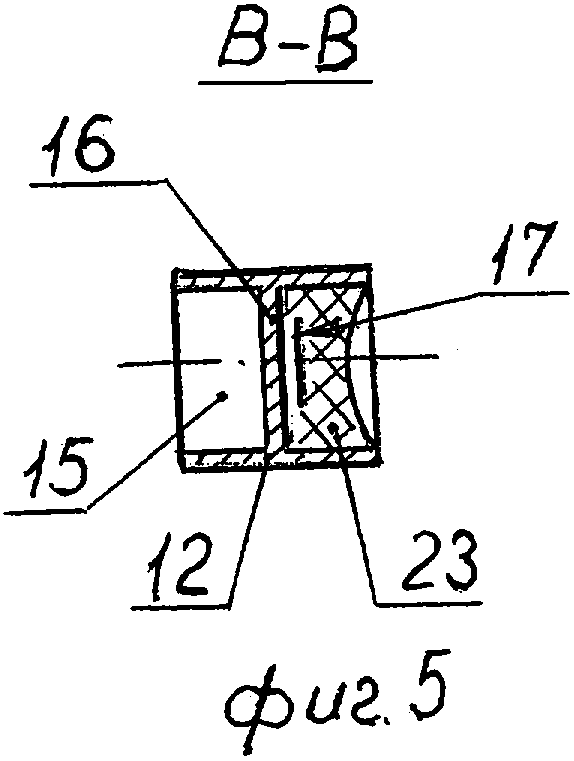
Каждый силоизмерительный датчик 5 включает в себя две параллельно расположенные в одной вертикальной плоскости и разнесенные между собой силовоспринимающие балки - верхнюю 12 и нижнюю 13 - в виде брусьев прямоугольного поперечного сечения, каждая из которых имеет собственный измерительный участок 14, на котором в боковых стенках силовоспринимающей балки выполнены встречно направленные несквозные выемки 15, разделенные тонкой вертикальной силоизмерительной перегородкой 16, на которой закреплены на одной из сторон тензометрические преобразователи 17, регистрирующие деформацию сдвига, и два вертикальных элемента 18, соединяющих между собой концевые части силовоспринимающих балок с образованием силоизмерительной рамки.
Предпочтительно, в каждой силоизмерительной рамке силовоспринимающие балки и вертикальные элементы выполнены за одно целое в виде параллелепипеда с полостью 19 в вертикальной боковой стенке, при этом сама силоизмерительная рамка выполнена с выступами 20 на торцевых поверхностях, прилегающих к силовоспринимающему элементу 2 и к силопередающему элементу 9, а в вертикальных элементах 18 в местах расположения выступов 20 выполнены резьбовые гнезда 21 под болты 22 для торцевого соединения силоизмерительного датчика 5 с одной стороны с силовоспринимающим элементом 2, а с другой стороны - с силопередающим элементом 9. Предпочтительно, несквозные выемки 15 выполнены в виде цилиндрических гнезд одинакового диаметра и глубины, и полости выемок заполнены герметизирующим полимерным материалом 23, закрывающим тензометрические преобразователи 17. В каждой силовоспринимающей балке выполнены выходящие в цилиндрические гнезда каналы 24 для электропроводки от датчиков к гермовыводу 25.
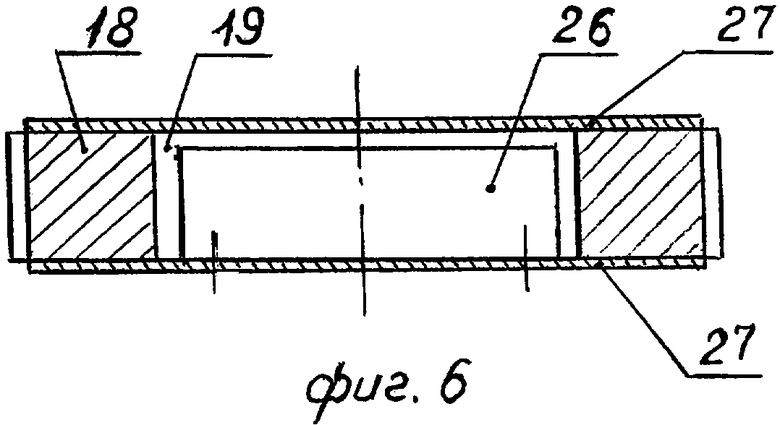
Во втором примере исполнения, показанном на фиг.6, в полости силоизмерительной рамки установлен блок 26 обработки сигналов с тензометрических преобразователей, при этом силоизмерительная рамка оснащена крышками 27, изолирующими полость 19 и несквозные выемки 15 от воздействия внешней среды, а сам блок 26 обработки сигналов с тензометрических преобразователей закреплен на одной из указанных крышек.
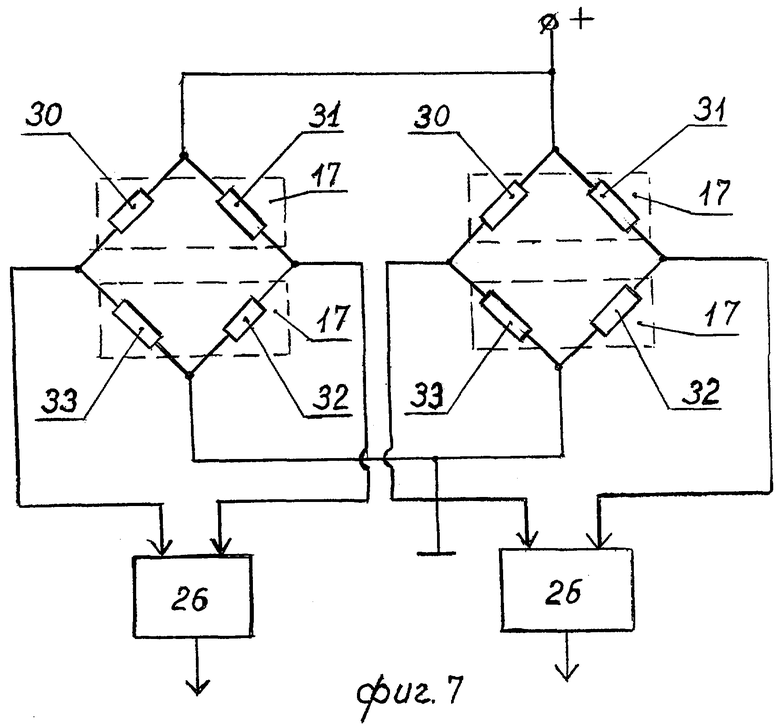
Каждый силоизмерительный датчик 5 содержит два тензометрических преобразователя 17, один из которых расположен на верхней 12 силоизмерительной балке, а другой - на нижней 13 силоизмерительной балке. Тензометрический преобразователь состоит из двух последовательно соединенных резисторов. Резисторы расположены на вертикальной перегородке 16 под углом 45° относительно продольной оси силовоспринимающей балки и под углом 90° друг относительно друга. На верхней 12 силоизмерительной балке расположены резисторы 30 и 31, а на нижней - резисторы 32 и 33. Резисторы 30, 32 подвергаются воздействию растягивающих напряжений, а резисторы 31, 33 подвергаются воздействию сжимающих напряжений. Резисторы верхних и нижних силовоспринимающих балок образуют один измерительный мост с четырьмя активными сопротивлениями 30-33, подключенными к блоку 26 обработки сигналов с тензометрических преобразователей, сигналы с которых поступают в микропроцессор прибора безопасности подъемника (на чертеже не показан), в котором происходит алгебраическое сложение выходных сигналов силоизмерительных датчиков.
Заявляемое устройство работает следующим образом. При наличии на рабочей платформе оператора или любого груза, независимо от того, где именно они находятся, полная масса рабочей платформы и оператора передается на силоизмерительные датчики, при этом суммарное усилие, действующее на них, равно полной массе рабочей платформы и оператора. Усилие, действующее на любой из силоизмерительных датчиков, воспринимается его силовоспринимающими балками 12 и 13, которые деформируются. Увеличение действующего усилия приводит к изменению деформации силовоспринимающих балок. Одновременно изменяется деформация вертикальной перегородки 16, и, соответственно, резисторы тензометрических преобразователей 17 изменяют свое сопротивление. При изменении сопротивления резисторов тензометрических преобразователей изменяются выходные сигналы с измерительных мостов, причем изменение выходного сигнала соответствует суммарному изменению сопротивления всех тензометрических преобразователей, и, следовательно, сумма выходных сигналов соответствует суммарной массе груза и оператора.
Предлагаемое устройство может быть изготовлено промышленным способом на заводах, выпускающих оборудование для грузоподъемных машин. В устройстве могут быть использованы тензометрические преобразователи типа КФ5Р фирмы ТОВ «ВЕДА» (Украина) или другие тензометрические преобразователи подобного типа. Для обработки результатов измерений можно использовать приборы безопасности грузоподъемных машин с суммированием сигналов силоизмерительных датчиков, например ограничитель нагрузки ОПГ-1, выпускаемый Арзамасским приборостроительным заводом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОННЫЕ ТЕНЗОВЕСЫ | 1993 |
|
RU2044283C1 |
| ИЗМЕРИТЕЛЬНАЯ ВСТАВКА | 2011 |
|
RU2458326C1 |
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО НА ТРАНСПОРТНОМ СРЕДСТВЕ | 1993 |
|
RU2091723C1 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ ГРУЗОПОДЪЕМНОГО КРАНА | 2010 |
|
RU2445252C1 |
| ДАТЧИК УСИЛИЙ ДЛЯ ТЕНЗОМЕТРИЧЕСКИХ ВЕСОВ | 1997 |
|
RU2114405C1 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2011 |
|
RU2490203C2 |
| ВЕСОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2002 |
|
RU2222787C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СИЛЫ | 2009 |
|
RU2396527C1 |
| Устройство для измерения сил | 1978 |
|
SU742729A1 |
| Силоизмерительный датчик | 1981 |
|
SU972274A1 |
Изобретение относится к подъемно-транспортному оборудованию и может быть использовано в подъемниках с рабочей платформой. Устройство содержит установленный на оголовке стрелы подъемника с возможностью плоскопараллельного перемещения силовоспринимающий элемент, связанный с основанием рабочей платформы через силопередающие узлы, снабженные тензометрическими преобразователями. Силовоспринимающий элемент оголовка стрелы подъемника и основание рабочей платформы связаны между собой с помощью двух параллельных и разнесенных друг относительно друга силопередающих узлов, выполненных в виде силоизмерительных датчиков рамочного типа, с торцевым креплением к силовоспринимающему элементу подъемника и основанию рабочей платформы с помощью резьбовых крепежных элементов. Каждый из указанных силоизмерительных датчиков рамочного типа включает в себя две параллельные, расположенные одна над другой и симметрично разнесенные относительно продольной оси датчика силовоспринимающие балки, каждая из которых выполнена в виде бруса с прямоугольным поперечным сечением и имеет собственный измерительный участок, на котором в боковых стенках силовоспринимающей балки выполнены встречно направленные несквозные выемки, разделенные тонкой вертикальной силоизмерительной перегородкой, на которой закреплен собственный тензометрический преобразователь, и два вертикальных элемента, соединяющих между собой концевые части силовоспринимающих балок с образованием силоизмерительной рамки, в которых выполнены гнезда под указанные резьбовые крепежные элементы. Техническим результатом является повышение надежности устройства и снижение трудоемкости монтажа устройства на подъемнике. 6 з.п. ф-лы, 7 ил.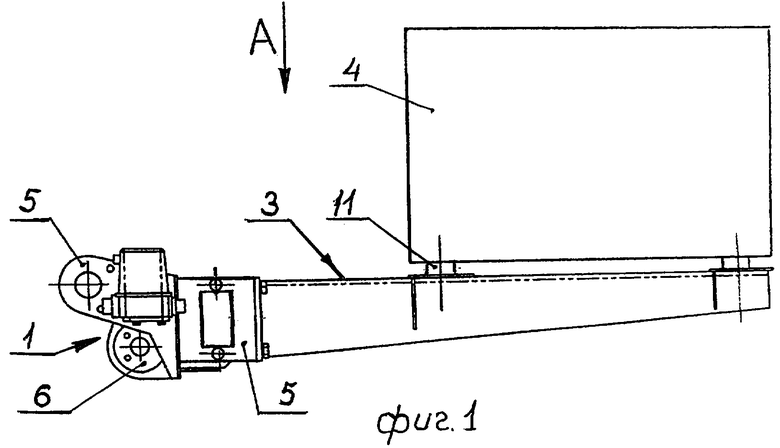
| Карусельная машина для отделки, отопки и т.д. химических стаканов и тому подобных стеклянных изделий | 1940 |
|
SU58521A1 |
| US 4573542 A1, 04.03.1986 | |||
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО НА ТРАНСПОРТНОМ СРЕДСТВЕ | 1993 |
|
RU2091723C1 |
| ВЕСОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1998 |
|
RU2140060C1 |

