Изобретение относится к транспортирующим устройствам ленточного типа, в частности к предназначенным для горизонтального, наклонного и вертикального перемещения сыпучих грузов.
Известен ленточный элеватор для сыпучих материалов, содержащий две обращенные и прижатые краями друг к другу при помощи уплотнительных элементов ленты и предназначенный для вертикального перемещения зажатого между лентами груза (см. патент SU №1212321, кл. В65G 15/08, 1986 г.). Этот элеватор имеет сложную конструкцию с большим количеством сопрягаемых и взаимодействующих элементов, что приводит его к частым поломкам и остановкам.
Известен ленточный конвейер, включающий раму с бесконечной лоткообразной несущей лентой, закрытой сверху кожухом и перемещающейся с помощью горизонтальных роликов по боковым неподвижным поверхностям с небольшим коэффициентом трения (см. патент РФ №2286298, В65G 15/62, 2005 г.). Известный конвейер достаточно хорошо перемещает сыпучие грузы только в горизонтальном положении, но не предназначен для вертикального перемещения.
Наиболее близким техническим решением к заявленному изобретению является транспортер, включающий гибкую бесконечную ленту лоткового типа с механизмом перемещения в виде нескольких рядов роликов, установленных под углом друг к другу (см. А.с. SU №1293124, С02F 11/12, 1985 г.). Этот транспортер достаточно эффективно перемещает грузы только в горизонтальной плоскости, он также не предназначен для вертикального перемещения.
Настоящее изобретение направлено на решение технической задачи расширения функциональных возможностей транспортера, повышения его универсальности для транспортирования сыпучего груза без потерь в разных плоскостях, включая вертикальное перемещение.
Решение поставленной технической задачи достигается тем, что транспортер, включающий гибкую горизонтально расположенную бесконечную ленту с краями лоткового типа и размещенной под бесконечной лентой опорой, выполненной в виде ряда основных горизонтально расположенных роликов, и примыкающих к их торцам по разные стороны основных боковых роликов, установленных под краями бесконечной ленты, при этом транспортер выполнен с дополнительными наклонным и вертикальным участками и снабжен механизмом изменения угла наклона краев бесконечной ленты, обеспечивающим увеличение угла наклона краев ленты по мере перехода от горизонтального участка к наклонному участку транспортера и обеспечивающим полное смыкание краев бесконечной ленты в зоне вертикального участка. Механизм изменения угла наклона краев бесконечной ленты выполнен в виде ряда дополнительных роликов, примыкающих к торцам основных боковых роликов, но с углом наклона осей, обратным углу наклона основных боковых роликов, при этом длина основных горизонтально расположенных роликов и основных боковых роликов с наклонно расположенными осями постепенно уменьшается по мере перехода от горизонтального участка транспортера к наклонному участку, а угол наклона осей основных боковых роликов увеличивается по мере перехода от горизонтального участка к наклонному участку, а в зоне вертикального участка транспортера механизм изменения угла наклона краев бесконечной ленты снабжен дополнительным рядом горизонтально расположенных роликов, торцы которых примыкают к торцам роликов с обратным углом наклона, обеспечивающим полное смыкание с частичным перекрытием внахлестку краев бесконечной ленты в зоне вертикального участка. Механизм изменения угла наклона краев бесконечной ленты выполнен в виде закрепленных по краям бесконечной ленты по всей ее длине ряда замков и взаимодействующих с ними двух продольных направляющих, установленных вдоль транспортера, при этом высота установки продольных направляющих относительно основных горизонтально расположенных роликов увеличивается по мере перехода от горизонтального участка к наклонному участку, а расстояние между продольными направляющими уменьшается по мере перехода от горизонтального участка к наклонному участку до полного смыкания направляющих в зоне вертикального участка, что обеспечивает полное смыкание краев бесконечной ленты. Механизм изменения угла наклона краев бесконечной ленты выполнен в виде закрепленных на осях основных боковых роликов с их свободного торца ряда замков и взаимодействующих с ними двух продольных направляющих, установленных вдоль транспортера, при этом высота установки продольных направляющих относительно основных горизонтально расположенных роликов увеличивается по мере перехода от горизонтального участка к наклонному участку, а расстояние между продольными направляющими уменьшается по мере перехода от горизонтального участка к наклонному участку до полного их смыкания, что обеспечивает смыкание краев бесконечной ленты в зоне вертикального участка, причем угол наклона осей основных боковых роликов относительно основных горизонтально расположенных роликов увеличивается по мере перехода от горизонтального участка через наклонный участок к вертикальному участку.
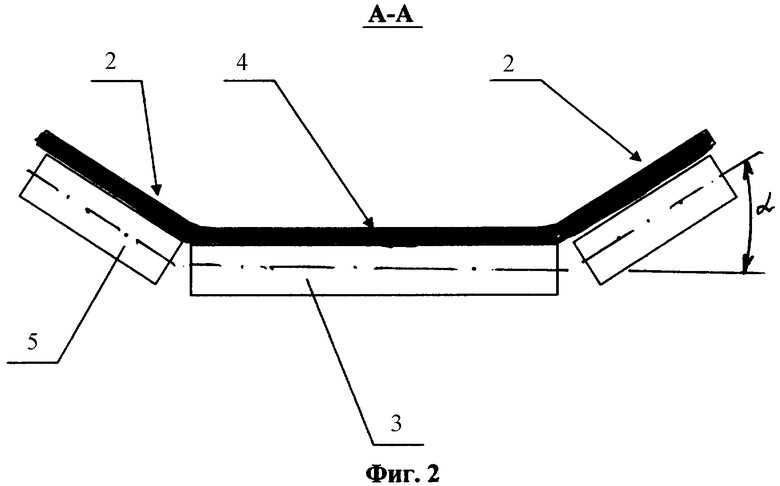
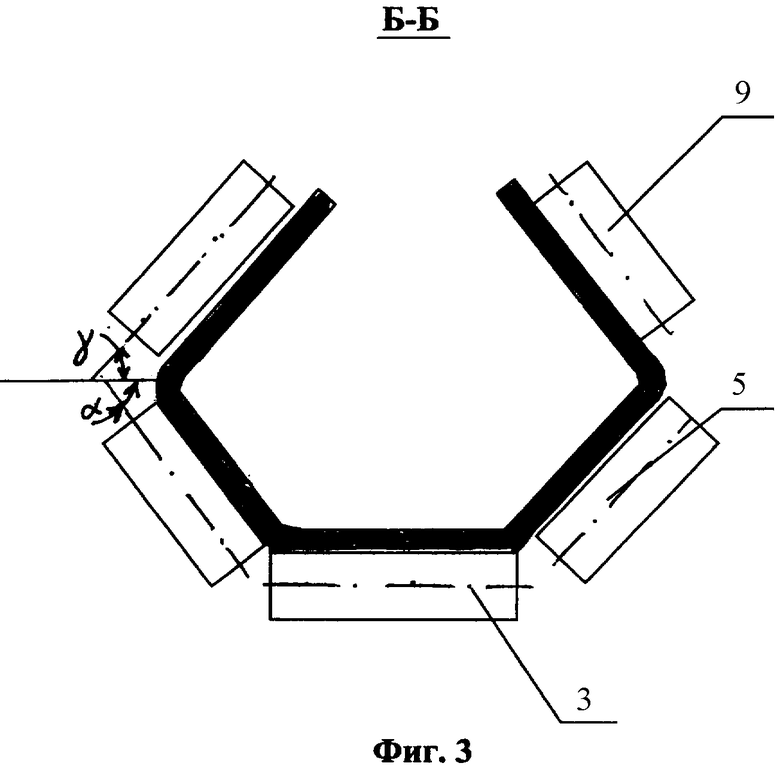
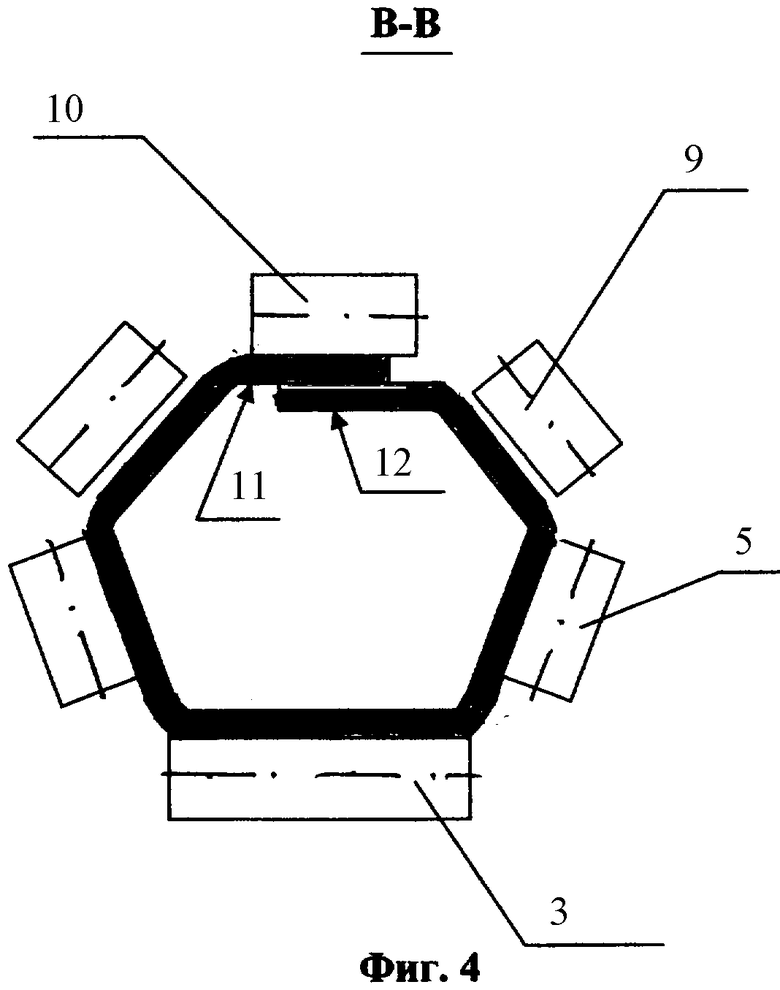
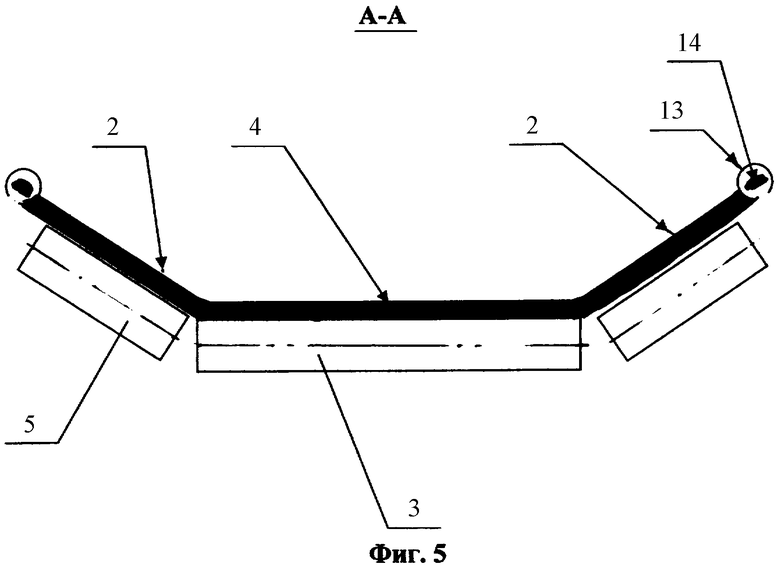
Изобретение поясняется чертежами. На фиг.1 изображен фрагмент транспортера с наклонным и вертикальными участками и с механизмом изменения угла наклона краев бесконечной ленты в виде дополнительных роликов, на фиг.2 - то же, разрез А-А на фиг.1, на фиг.3 - то же, разрез Б-Б на фиг.1, на фиг.4 - то же разрез В-В на фиг.1. На фиг.5, 6, 7 - фрагмент (разрез) транспортера с механизмом изменения угла наклона краев бесконечной ленты в виде установленных по краям ленты замков, взаимодействующих с направляющими при различных положениях направляющих. На фиг.8, 9, 10 - фрагмент (разрез) транспортера с механизмом изменения угла наклона краев бесконечной ленты в виде установленных на осях боковых роликов замков, взаимодействующих с направляющими, при различных направляющих.
Транспортер содержит гибкую бесконечную ленту 1 с краями 2 лоткового типа (показано на фиг.2, 5, 8), приводной механизм (не показан) и опору, выполненную в виде ряда основных роликов 3 с горизонтально расположенными осями, размещенными вдоль центральной части 4 бесконечной ленты 1, а также рядов основных боковых роликов 5, нижними торцами примыкающих к торцам роликов 3. Боковые ролики 5 выполнены с наклонно расположенными осями и установлены под углом α к осям роликов 3 по разные стороны под краями 2 бесконечной ленты 1.
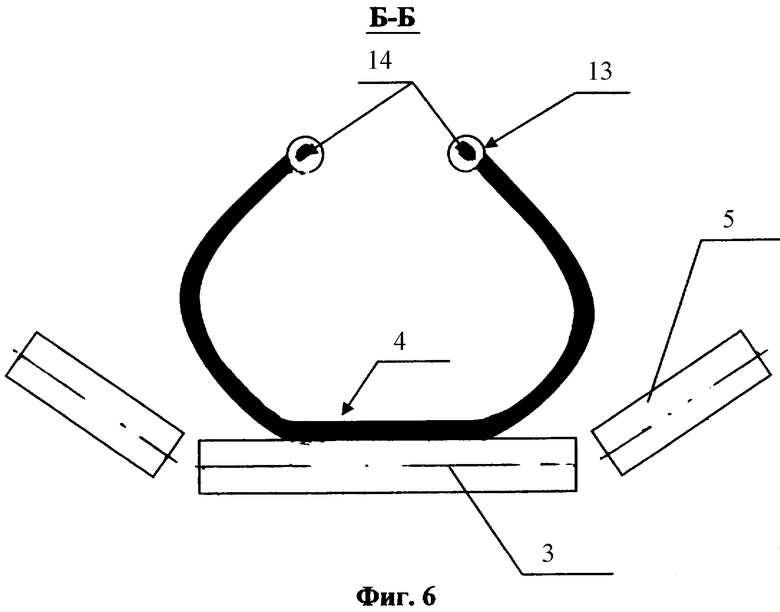
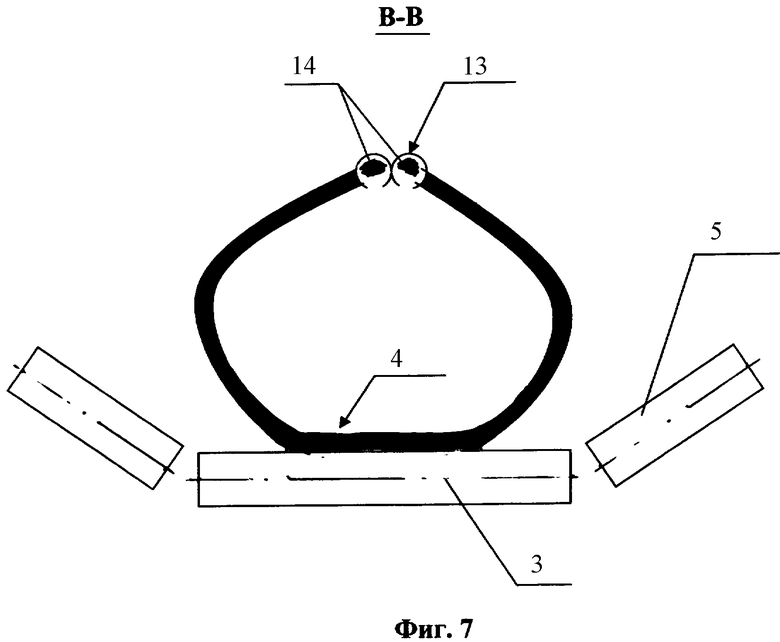
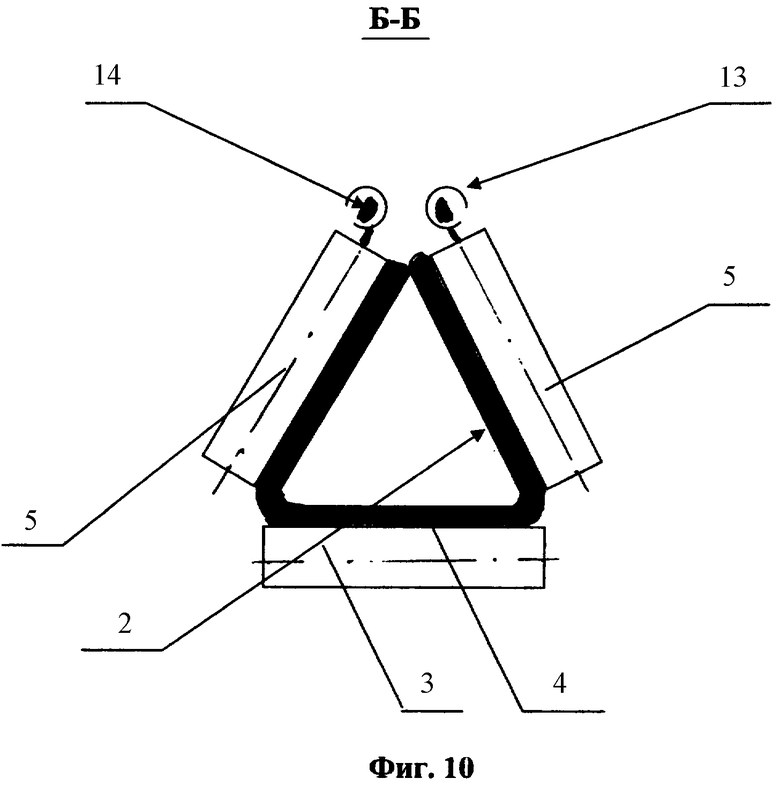
Транспортер имеет горизонтальный участок 6, дополнительный наклонный участок 7, дополнительный вертикальный участок 8 и снабжен механизмом изменения угла наклона краев 2 бесконечной ленты 1 с возможностью увеличения угла наклона краев 2 ленты 1 по мере перехода от горизонтального участка 6 к наклонному участку 7 транспортера до полного смыкания краев 2 бесконечной ленты 1 в зоне вертикального участка 8. Использование механизма изменения угла наклона краев 2 бесконечной ленты 1 дает возможность изменять угол β наклона краев 2 к центральной части 4 ленты 1, увеличивающийся по мере перехода от горизонтального участка 6 к наклонному участку 7 до полного смыкания краев 2 бесконечной ленты 1 в зоне вертикального участка 8. Т.е., по мере движения ленты 1 от горизонтального участка 6 к наклонному участку 7 ее края 2 все больше приподнимаются, приближаясь друг к другу и потом, в зоне перехода к вертикальному участку 8, полностью смыкаются в трубу (показано на фиг.4, 7, 10).
Один из вариантов исполнения механизма изменения угла наклона краев 2 бесконечной ленты 1 представлен на фиг.1, 2, 3 и 4. Изображенный на этих чертежах механизм изменения угла наклона краев бесконечной ленты 1 выполнен в виде ряда дополнительных роликов 9, контактирующих с краями 2 ленты 1 и установленных над основными боковыми роликами 5 с углом наклона γ осей, обратным углу наклона α осей основных боковых роликов 5, а в зоне вертикального участка механизм снабжен рядом дополнительных горизонтально расположенных роликов 10, торцы которых примыкают к торцам роликов с обратным углом наклона, при этом ролики 10 обеспечивают полное смыкание краев ленты с частичным перекрытием внахлест краев 11 и 12 ленты 1 в зоне вертикального участка 8 транспортера. Длина основных горизонтально расположенных роликов 3 и основных боковых роликов 5 с наклонно расположенными осями уменьшается по мере перехода от горизонтального участка 6 к наклонному участку 7. Угол наклона α осей основных боковых роликов увеличивается по мере перехода от горизонтального участка 6 к наклонному участку 7. Изменение угла β наклона краев 2 ленты 1 достигается посредством изменения угла α наклона осей боковых роликов 5.
Следующий вариант исполнения механизма изменения угла наклона краев 2 бесконечной ленты 1 представлен на фиг.5, 6 и 7. Изображенный на этих рисунках механизм изменения угла наклона краев 2 бесконечной ленты 1 выполнен в виде закрепленных по ее краям 2 по всей ее длине ряда замков 13 и взаимодействующих с ними двух продольных направляющих 14, установленных вдоль транспортера. Высота установки продольных направляющих 14 относительно основных горизонтально расположенных роликов 3 увеличивается по мере перехода от горизонтального участка 6 к наклонному участку 7. Расстояние между продольными направляющими 14 уменьшается по мере перехода от горизонтального участка 6 к наклонному участку 7 до полного смыкания направляющих в зоне вертикального участка 8, что обеспечивает полное смыкание краев бесконечной ленты.
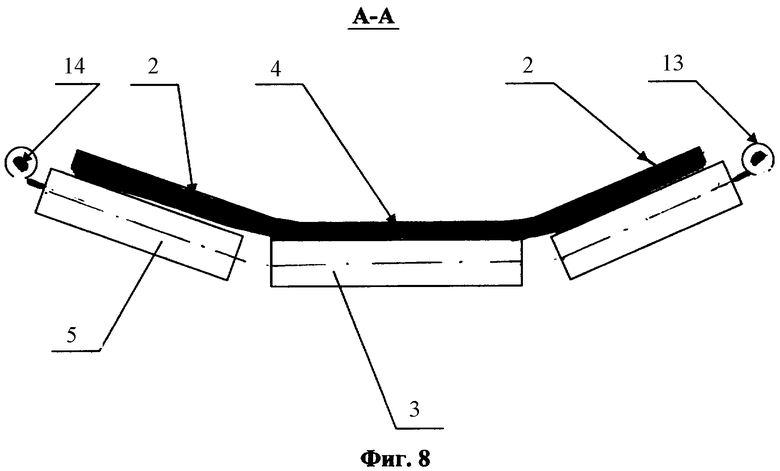
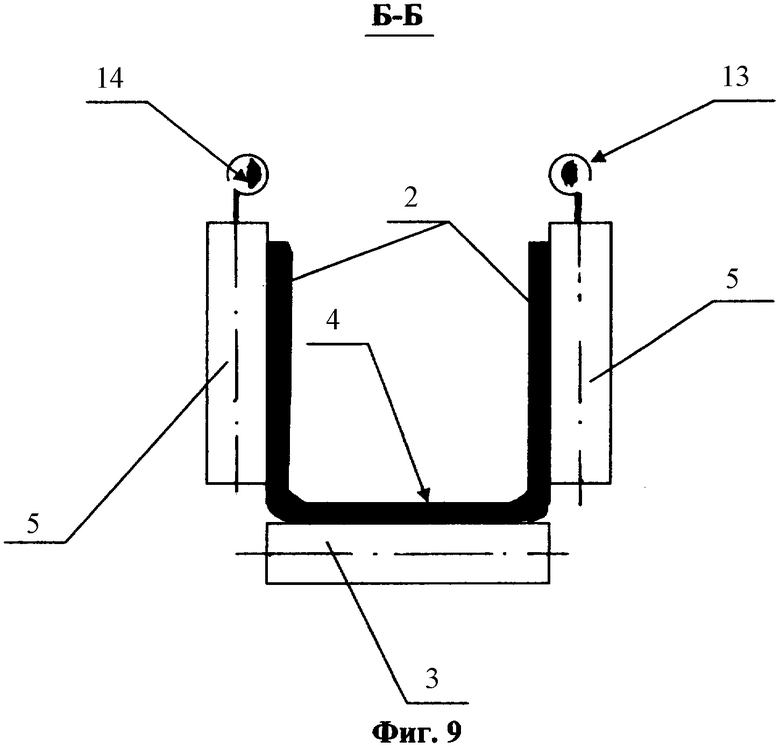
Следующий вариант выполнения механизма изменения угла наклона краев 2 бесконечной ленты 1 представлен на фиг.8, 9 и 10. Изображенный на этих рисунках механизм изменения угла наклона краев 2 бесконечной ленты 1 выполнен в виде закрепленных на осях основных боковых роликов 5 с их свободного торца ряда замков 13 и взаимодействующих с ними двух продольных направляющих 14, установленных вдоль транспортера. Высота установки продольных направляющих 14 относительно основных горизонтально расположенных роликов 3 увеличивается по мере перехода от горизонтального участка 6 к наклонному участку 7. Расстояние между продольными направляющими 14 уменьшается по мере перехода от горизонтального участка 6 к наклонному участку 7 до полного смыкания направляющих, что обеспечивает смыкание краев 2 ленты 1 в зоне вертикального участка 8. Угол наклона α осей основных боковых роликов 5 относительно основных горизонтально расположенных роликов 3 увеличивается по мере перехода от горизонтального участка 6 через наклонный участок 7 к вертикальному участку 8.
Транспортер работает следующим образом. Сыпучий груз загружают в зоне горизонтального участка 6 на ленту 1. Лента 1 приводится в движение механизмом ее перемещения вдоль роликов 3, 5, 9, 10. По мере продвижения груза к наклонному участку 7 края 2 ленты 1 все больше приподнимаются и наклоняются, сближаясь друг к другу, плотно охватывая груз и препятствуя его просыпанию.
В варианте исполнения механизма изменения угла наклона краев 2 бесконечной ленты 1, представленном на фиг.1, 2, 3 и 4, края 2 ленты 1 захватываются роликами 9, постепенно приближаются друг к другу, захватываются роликами 10 и смыкаются внахлест, образуя транспортирующую трубу. В этот момент груз плотно охвачен со всех сторон, транспортер перемещает его под любым острым углом вверх и даже вертикально. Перед разгрузкой транспортера его переводят опять в горизонтальное положение (не показано) и с помощью роликов 9 и 5 осуществляют размыкание краев 2 ленты 1 в обратном порядке, а затем ссыпают груз с открытого лотка ленты 1.
В варианте исполнения механизма изменения угла наклона краев 2 бесконечной ленты 1, представленном на фиг.5, 6 и 7, края 2 ленты 1 связаны посредством замков 13 с направляющими 14. По мере продвижения ленты 1 вдоль горизонтального участка 6 края 2 приподнимаются за счет того, что замки 13 скользят по наклонным направляющим 14. Направляющие 14 установлены не только наклонно, но и постепенно приближаются друг к другу по длине транспортера. Края 2 ленты 1 постепенно смыкаются, когда лента 1 переходит от наклонного участка 7 к вертикальному участку 8, и плотно охватывают груз, образуя транспортирующую трубу.
В варианте исполнения механизма изменения угла наклона краев 2 бесконечной ленты 1, представленном на фиг.8, 9 и 10, замки 13 закреплены по торцам боковых роликов 5 и взаимодействуют с направляющими 14, которые удерживают ролики 5 под заданным углом наклона α. Угол наклона а постепенно увеличивается, в зоне наклонного участка 7 ролики 5 располагаются почти вертикально, поднимая края 2 движущейся ленты 1. В зоне вертикального участка 8 края 2 плотно смыкаются, образуя транспортирующую трубу.
Все представленные варианты исполнения механизма изменения угла наклона краев 2 бесконечной ленты 1 обеспечивают эффективное наклонное и вертикальное перемещение грузов. Такой транспортер значительно проще аналогичных, предназначенных для наклонного и вертикального перемещения сыпучих, гранулированных, щебенкоподобных и других таких же грузов. При простоте конструкции он обеспечивает надежный захват и перемещение груза в любых плоскостях без его потерь.
Таким образом, заявленное изобретение решает техническую задачу расширения функциональных возможностей транспортера, повышения его универсальности для транспортирования сыпучего груза без потерь в разных плоскостях, включая вертикальное перемещение.
Транспортер включает гибкую бесконечную ленту, образующую горизонтальный, наклонный и вертикальный участки транспортера с краями лоткового типа и опорой в виде ряда основных роликов и примыкающих к их торцам по разные стороны основных боковых роликов. Ролики установлены под краями бесконечной ленты. Транспортер также включает механизм изменения угла наклона краев бесконечной ленты с возможностью увеличения угла наклона краев ленты по мере перехода от горизонтального участка к наклонному участку транспортера до полного смыкания краев бесконечной ленты в зоне вертикального участка. Механизм изменения угла наклона краев бесконечной ленты выполнен в виде ряда расположенных вдоль бесконечной ленты по всей ее длине замков и взаимодействующих с ними двух продольных направляющих, установленных вдоль транспортера. Технический результат направлен на расширение функциональных возможностей транспортера, повышение его универсальности для транспортирования сыпучего груза без потерь в разных плоскостях, включая вертикальное перемещение. 2 з.п. ф-лы, 10 ил.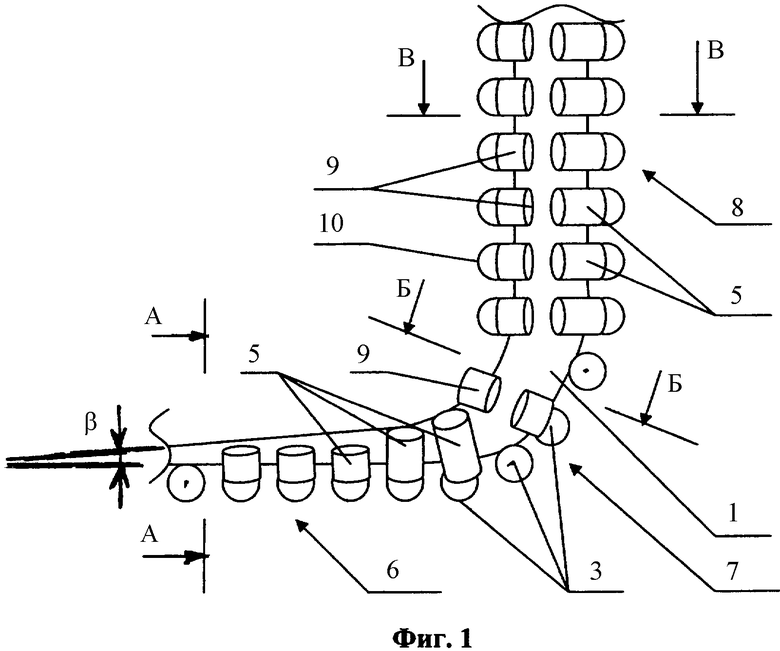
| Устройство для удаления ила | 1985 |
|
SU1293124A1 |
| Вертикальный ленточный конвейер | 1979 |
|
SU874506A1 |
| Грузонесущий орган подвесного ленточного конвейера | 1981 |
|
SU988676A1 |
| Способ изготовления звездочек для французской бороны-катка | 1922 |
|
SU46A1 |
| Устройство для растягивания стеклянных трубок | 1982 |
|
SU1066946A1 |

