Область техники, к которой относится изобретение
Настоящее изобретение относится к системе для выемки грунта из-под заглубленной трубы, проложенной под землей вблизи ее поверхности, осуществляемой после удаления почвы над трубой и с обеих сторон от трубы.
Уровень техники
Для транспортировки газа, нефти или других сред трубопроводы обычно прокладывают под землей вблизи ее поверхности, например, на глубине приблизительно 1 м. Трубопровод закапывают вместе с синтетической лентой, намотанной вокруг его поверхности с целью предотвращения повреждений поверхности трубы, ее коррозии и замерзания транспортируемой жидкости в северных районах. Так как трубопровод используется в течение многих лет, то нередко из-за повреждений данной ленты на наружной поверхности трубы образуется коррозия, другие повреждения. Это не только препятствует протеканию жидкости по трубопроводу, но и может вызвать аварию на трубопроводе из-за утечек жидкости. В связи с этим через определенный промежуток времени после укладки трубопровода в землю требуются ремонтные работы. При таком ремонте трубопровод длительной эксплуатации открывают с поверхности земли путем удаления почвы вокруг трубы для замены изолирующей ленты, которой обмотан трубопровод, или для замены трубы, поврежденной коррозией, на новую.
Известно техническое решение, приведенное в патенте США 6154988, описывающем систему для выемки грунта вокруг уложенной в землю трубы с целью ремонта трубопровода. В системе для выемки грунта из-под заглубленной трубы по данному патенту имеется режущий механизм, установленный под трубой с возможностью вращения вокруг горизонтальной оси. Этот режущий механизм имеет конструкцию в виде сдвоенного спиралеобразного резака, состоящего из левого и правого спиралеобразных режущих элементов, и присоединен к двигательному блоку, например электродвигателю, с помощью лопастного вала, при этом сам двигатель расположен над режущим механизмом.
Такая традиционная система не лишена недостатков. Поскольку двигательный блок расположен над режущим механизмом, необходимо иметь не только определенное пространство для его установки в верхних и нижних частях системы, но также требуется защитить и сам двигательный блок от внешних воздействий, а это неизбежно приводит к увеличению размера всей системы для выемки грунта.
Кроме того, необходимо увеличение диаметра вала, который соединяет режущий механизм с двигательным блоком, чтобы учесть изгибающий момент, действующий на вал, что является недостатком в плане прочности конструкции. Кроме того, высокое положение центра тяжести из-за того, что двигательный блок расположен высоко, неблагоприятно сказывается на устойчивости системы.
Раскрытие изобретения
Настоящее изобретение направлено на устранение вышеуказанных недостатков, а основная задача изобретения заключается в предложении компактной системы для выемки грунта из-под заглубленной трубы, обеспечивающей защиту моторов и имеющей прочную и устойчивую конструкцию.
Вышеуказанная задача решена в системе для выемки грунта из-под заглубленной трубы в соответствии с изобретением, отличающейся тем, что данная система содержит пару вращающихся режущих механизмов, удерживаемых с возможностью охвата сверху проложенной под землей трубы и предназначенных для выемки грунта из-под трубы, причем каждый вращающийся режущий механизм содержит приводные средства.
Согласно изобретению пара вращающихся режущих механизмов удерживается с возможностью охвата сверху проложенной трубы и вращения для выемки грунта из-под проложенной трубы.
В соответствии с изобретением каждый вращающийся режущий механизм спроектирован с возможностью установки в нем приводных средств, поэтому пространство, требуемое для выходных валов приводных средств, может быть уменьшено, что ведет к уменьшению размеров и массы всей системы.
Приводные средства могут быть герметично закрыты, тем самым защищены от возможных повреждений, вызванных внешним воздействием, и предохранены от проникновения земли, песка, ветра и снега. В дополнении к этому возможно обеспечить шумоизоляцию.
Кроме того, так как выходные валы приводных средств могут быть укорочены, плечо изгибающего момента, действующего на выходные валы, может быть уменьшено, что дает преимущества в плане прочности. Кроме того, в данном изобретении центр тяжести системы расположен ниже, что ведет к повышению устойчивости системы в процессе выемки грунта.
В соответствии с изобретением пара вращающихся режущих механизмов установлена с возможностью перевода из открытого положения, в котором они отдалены один от другого, в закрытое положение, в котором они сближены друг с другом. При этом, когда вращающиеся режущие механизмы находятся в закрытом положении, соответствующие оси вращения режущих механизмов отклонены от вертикальной оси таким образом, что выступающие концы вращающихся режущих механизмов обращены внутрь. Благодаря такому расположению земля и песок, вырытые с помощью вращающихся режущих механизмов, могут плавно удаляться по диагонали вниз под действием силы тяжести. Кроме того, такое расположение позволяет уменьшить диаметр вращающихся режущих механизмов, следовательно, сделать конструкцию системы более компактной и легкой по сравнению с системами, оборудованными вращающимися режущими механизмами с вертикально расположенными осями вращения. В изобретении каждое из приводных средств предпочтительно связано с редукторным устройством. В этом случае редукторное устройство содержит планетарную передачу, которая смонтирована с возможностью съема. Каждый вращающийся режущий механизм предпочтительно содержит цилиндрический опорный корпус, установленный с опорой на основную раму системы, и режущий (фрезерный) барабан, удерживаемый указанным опорным корпусом с возможностью вращения, причем приводной мотор расположен внутри опорного корпуса, а редукторное устройство размещено в режущем барабане.
Такая конструкция позволяет скомпоновать каждое из приводных средств и редукторных устройств в виде отдельных блоков, тем самым обеспечить упрощенное обслуживание системы. При этом в качестве приводных средств можно использовать приводной мотор гидравлического или электрического типа.
Каждый опорный корпус и каждый режущий барабан, совершающий перемещение относительно опорного корпуса, имеют противоположные поверхности с лабиринтной конструкцией. Это более надежно предохраняет конструкцию от проникновения извне посторонних сред, таких как земля и песок. Таким образом, приводные средства, редукторы и другие устройства могут быть надежно защищены от повреждения.
Над каждым опорным корпусом в середине тракта передачи мощности на соответствующий приводной мотор предпочтительно размещены релейные элементы. Благодаря такому расположению система может быть легко разделена на верхнюю и нижнюю части в месте установки релейных элементов. Таким образом, вращающиеся режущие механизмы могут быть выделены в отдельные блоки, что позволяет уменьшить время на их замену, а значит, увеличить производительность системы.
В соответствии с изобретением каждый вращающийся режущий механизм предпочтительно содержит цилиндрический опорный корпус, установленный с опорой на основную раму системы, и режущий барабан, удерживаемый опорным корпусом с возможностью вращения, при этом режущий барабан оснащен множеством режущих элементов, расположенных на его внешней периферийной поверхности. Предпочтительно, чтобы диаметр кривой, огибающей режущие элементы, был максимален на средней части режущего барабана относительно его оси и плавно уменьшался от указанной средней части по направлению к верхнему и нижнему концам барабана. Благодаря такому расположению верхний участок огибающей кривой, который расположен выше указанной средней части, может быть приближен к внешней периферийной поверхности заглубленной трубы, в то время как нижний участок кривой, расположенный ниже указанной средней части, может быть приближен к огибающей кривой противоположного режущего барабана в процессе выемки грунта, следовательно, земля и песок под проложенной трубой могут быть эффективно и полностью удалены.
Предпочтительно, чтобы участок кривой с максимальным диаметром был расположен приблизительно на одной трети полной длины барабана от его верхнего конца, а скорость уменьшения диаметра на верхнем участке кривой, расположенном выше участка с максимальным диаметром, превышала скорость уменьшения диаметра на нижнем участке кривой, расположенном ниже участка с максимальным диаметром.
Краткое описание чертежей
На фиг.1 показан вид сзади системы для выемки грунта из-под трубы согласно одному из примеров осуществления изобретения, в котором система показана перед началом или после завершения работы.
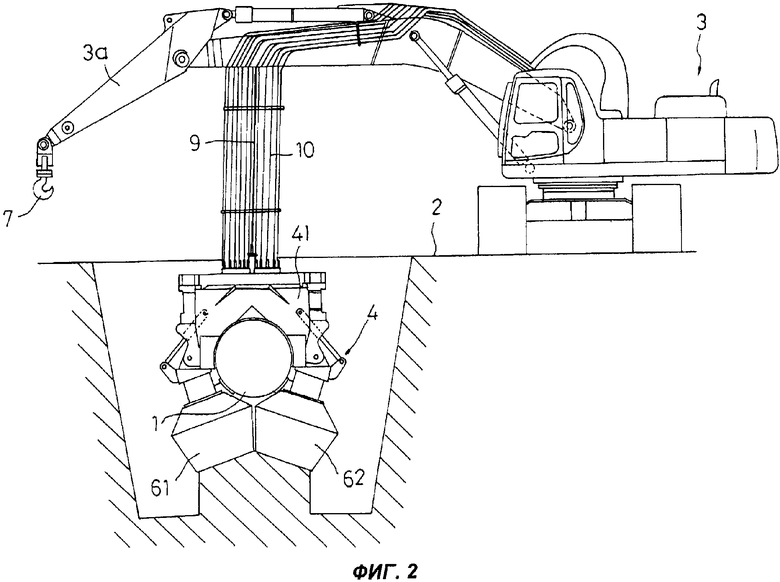
На фиг.2 показан вид сзади системы для выемки грунта из-под трубы согласно изобретению в процессе работы.
На фиг.3(а) и 3(b) показаны виды сбоку системы, представленной на фиг.1 и 2, соответственно.
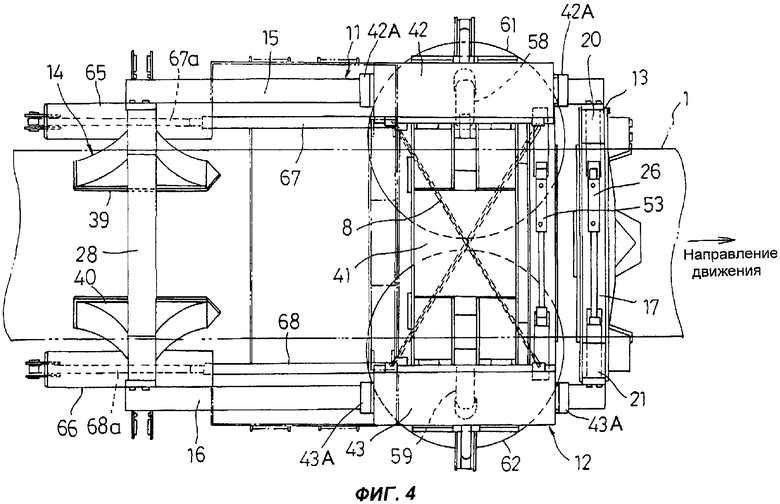
На фиг.4 показан вид в плане системы для выемки грунта из-под трубы согласно настоящему изобретению.
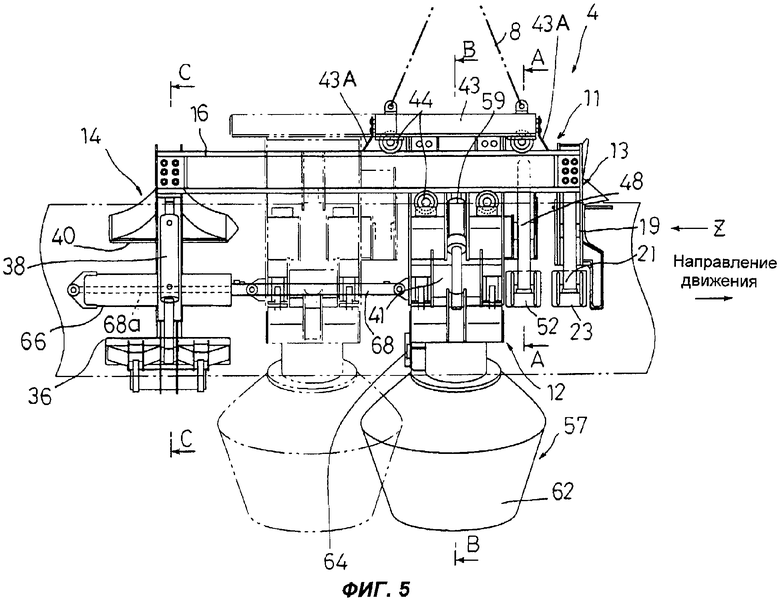
На фиг.5 показан вид сбоку системы для выемки грунта из-под трубы согласно настоящему изобретению.
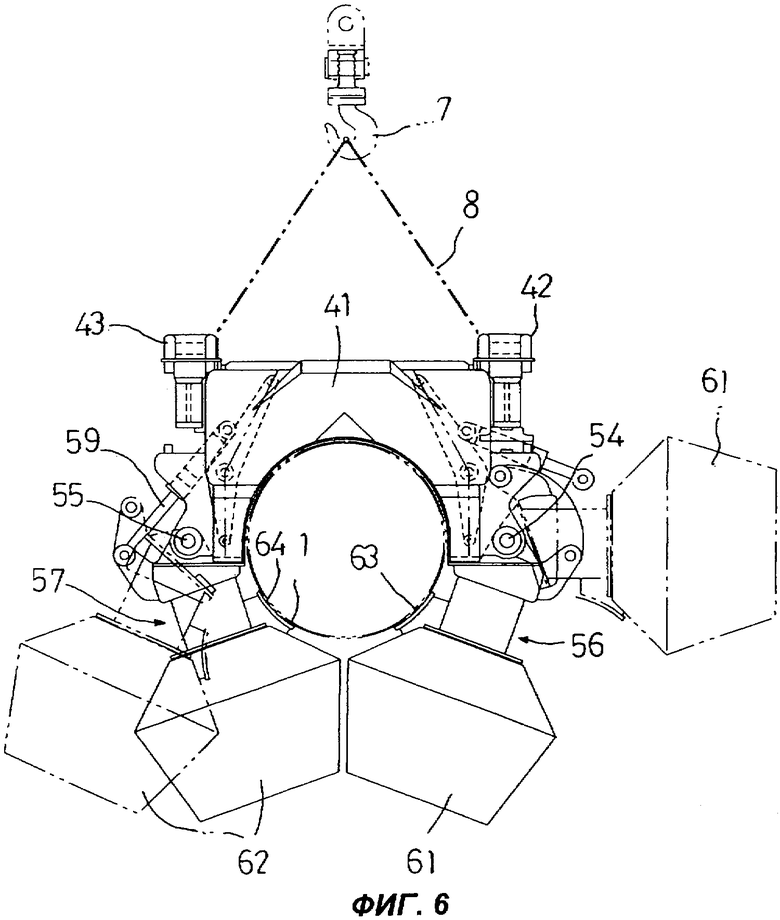
На фиг.6 показан вид спереди системы для выемки грунта из-под трубы согласно настоящему изобретению.
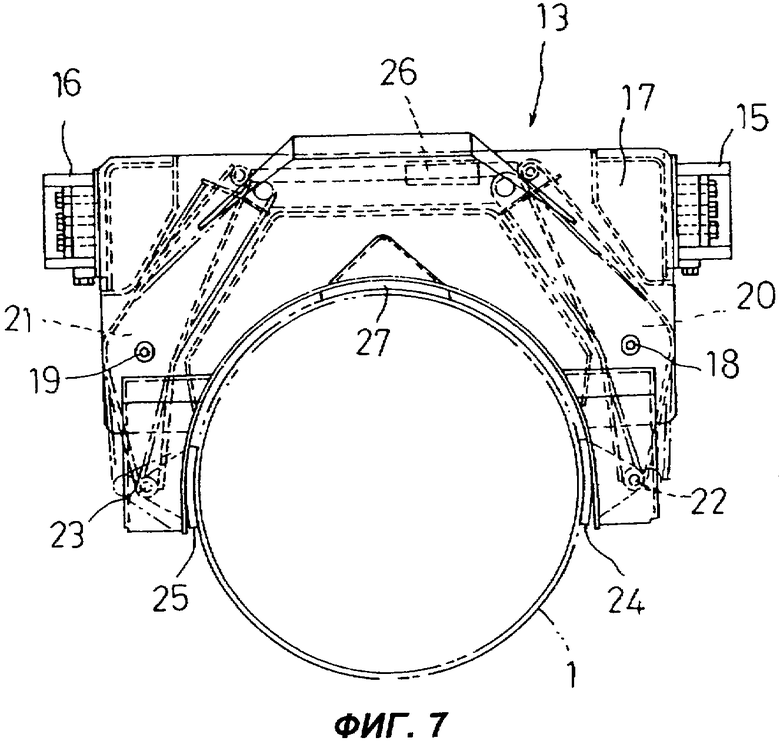
На фиг.7 показан вид по стрелке Z системы, представленной на фиг.5.
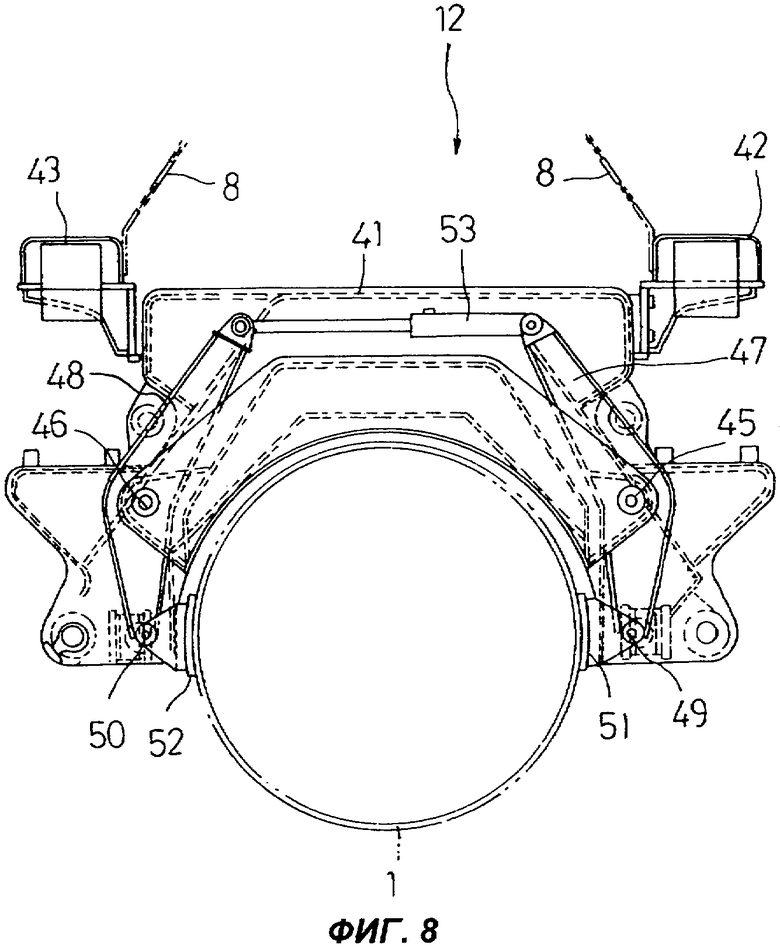
На фиг.8 показан разрез по линии А-А системы по фиг.5.
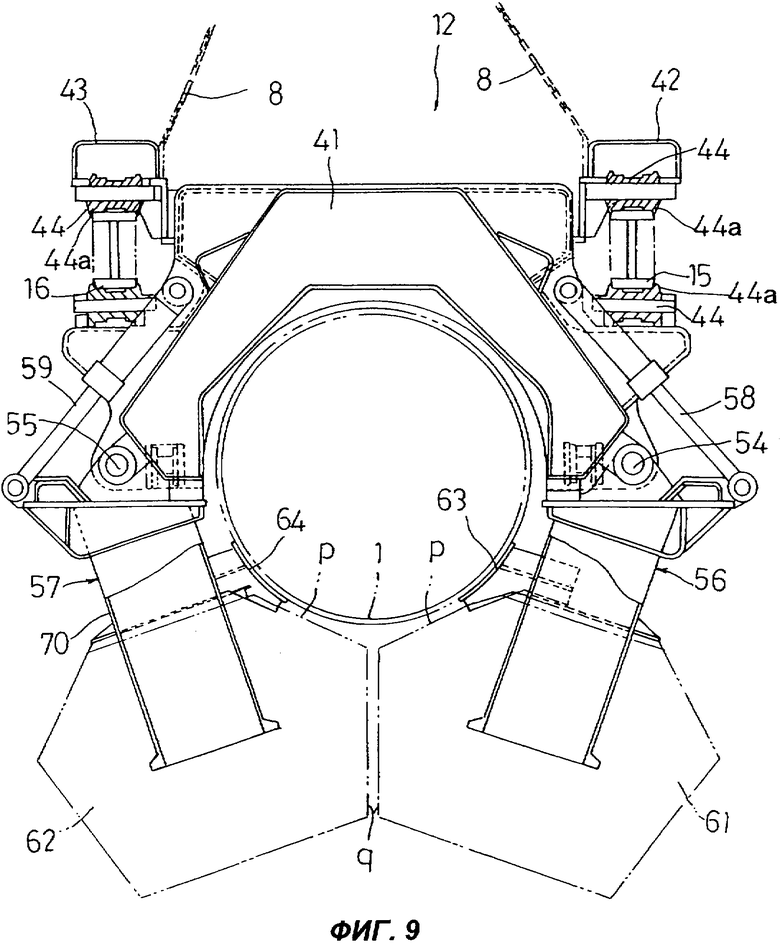
На фиг.9 представлен разрез по линии В-В системы по фиг.5.
На фиг.10 представлен разрез по линии С-С системы по фиг.5.
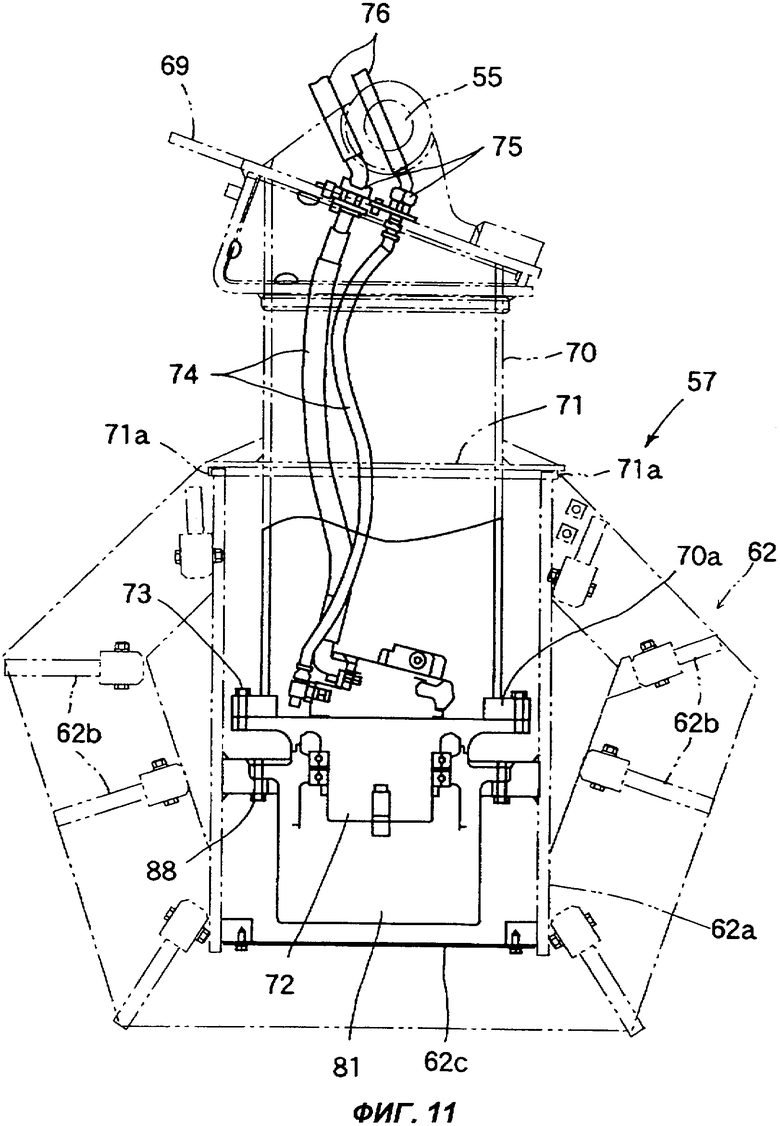
На фиг.11 представлен увеличенный вид вращающегося режущего механизма согласно изобретению.
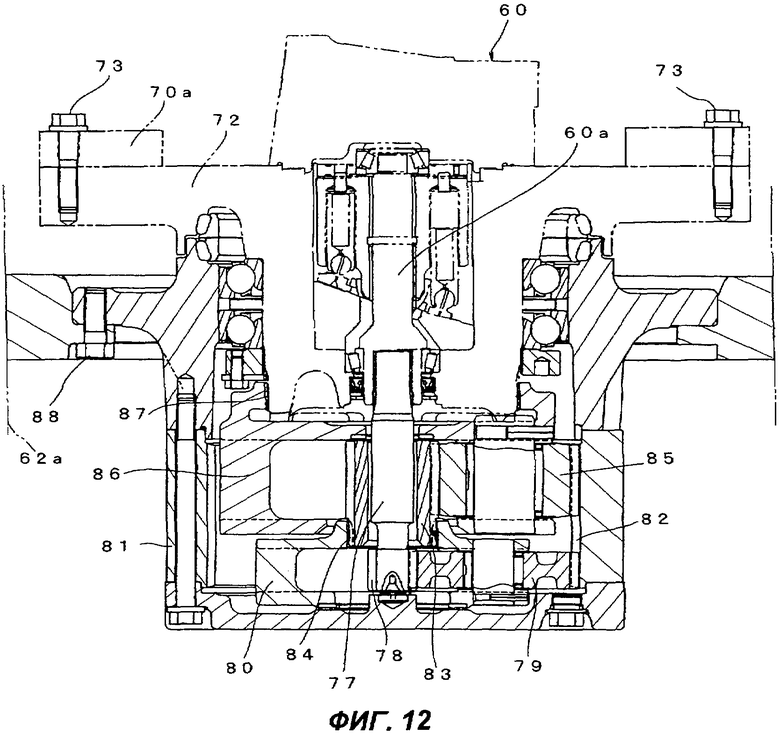
На фиг.12 показан в разрезе планетарный редуктор согласно настоящему изобретению.
Осуществление изобретения
Далее со ссылками на конкретные примеры осуществления настоящего изобретения приводится описание системы для выемки грунта из-под трубы.
На фиг.1 показан вид сзади системы для выемки грунта из-под трубы согласно настоящему изобретению перед началом или после эксплуатации. На фиг.2 показан вид сзади системы для выемки грунта из-под трубы согласно изобретению в процессе работы. На фиг.3(а) и 3(b) показаны виды сбоку системы, представленной на фиг.1 и 2, соответственно.
В настоящем варианте труба 1 проложена на глубине приблизительно 1 м от поверхности земли 2 и обмотана лентой по наружной поверхности.
Гидравлический экскаватор 3 выполняет основную функцию в ремонтных работах для трубы 1, а тяжелое оборудование, включая экскаватор, движется параллельно проложенной трубе 1.
В основном зона с правой стороны заглубленной трубы 1 в направлении движения предназначена для перемещения тяжелого оборудования, средств доставки материалов и т.д., в то время как область с левой стороны предназначена для вынимаемого грунта. Для раздельно вынимаемых слоя грунта (поверхностный слой), который снимают над трубой 1, и слоя грунта (нижний слой), который удаляют из-под трубы 1, выкапываемую область разделяют на область отсыпки поверхностного слоя грунта и область отсыпки нижнего слоя грунта, причем отвал поверхностного слоя располагают с левой, а нижнего слоя - с правой стороны в направлении движения системы. Ремонтные работы в основном состоят из следующих девяти этапов.
(1) Этап 1: удаление поверхностного слоя грунта.
(2) Этап 2: выкапывание траншеи с правой стороны
(3) Этап 3: выкапывание траншеи с левой стороны
(4) Этап 4: выемка грунта из-под трубы.
(5) Этап 5: снятие ленты и промывка наружной поверхности трубы
(6) Этап 6: повторное наматывание изоляционной ленты.
(7) Этап 7: обратная засыпка нижнего слоя грунта под трубу.
(8) Этап 8: уплотнение грунта под трубой.
(9) Этап 9: обратная засыпка поверхностного слоя грунта.
Система 4 для выемки грунта из-под трубы по настоящему изобретению используется на этапе 4, то есть для выемки грунта из-под трубы, после выполнения первого этапа - удаления поверхностного слоя грунта, второго этапа - выкапывания правой траншеи и третьего этапа - выкапывание левой траншеи.
На этапе выемки грунта из-под трубы эту выемку производят за областью, где была выкопана левая траншея на третьем этапе, таким образом, что нижние части левой 5 и правой 6 траншей соединяются между собой под трубой 1. Такая операция выемки грунта из-под трубы осуществляется следующим образом.
Гидравлический экскаватор 3 стандартного типа размещают гусеницами параллельно оси трубы 1 справа от нее таким образом, чтобы имелось пространство для перемещения тяжелого оборудования. Затем верхнюю конструкцию поворачивают приблизительно на угол 90 градусов влево по направлению движения, а систему 4 подвешивают тросом 8 на крюке 7, который прикреплен к выступающему концу стрелы 3а гидравлического экскаватора 3. Систему 4 устанавливают на заглубленной трубе 1 для работы, при этом режущие барабаны 61 и 62, которые описаны далее, находятся в открытом положении. Следует отметить, что нижний конец троса 8 прикреплен к рамам 42, 43 роликов, описанных далее.
Система 4 снабжена функцией самоходного движения, в процессе работы соединена с определенным узлом рабочего органа гидравлического экскаватора 3 тросом 9, представляющим собой страховочный трос, и гидравлически запитана от гидравлического экскаватора 3 через множество гидравлических линий 10.
Далее описываются особенности конструкции системы 4 для выемки грунта из-под заглубленной трубы. На фиг.4-6 показана система в соответствии с настоящим изобретением на виде в плане, сбоку и спереди. На фиг.7 показан вид по стрелке Z системы по фиг.5. На фиг.8 показан разрез по линии А-А системы по фиг.5. На фиг.9 показан разрез по линии В-В системы по фиг.5. На фиг.10 показан разрез по линии С-С системы по фиг.5.
Как показано, система 4 по настоящему изобретению содержит основную раму 11, располагаемую на заглубленной трубе 1, и опорную раму 12 режущего механизма, ниже называемую «средним суппортом», опирающуюся на основную раму 11, которая несет на своих нижних концах режущие барабаны 61 и 62.
Основная рама 11 содержит передний суппорт портального типа 13, расположенный спереди по ходу движения и охватывающий заглубленную трубу 1, задний суппорт портального типа 14, расположенный сзади по ходу движения и охватывающий заглубленную трубу 1, левый 15 и правый 16 рельсы двутаврового сечения, проходящие в продольном направлении таким образом, что они соединяют левый и правый верхние концевые части переднего 13 и заднего 14 суппортов соответственно.
Как показано на фиг.7, передний суппорт 13 содержит корпус 17, левый 20 и правый 21 прижимные рычаги, имеющие форму бумеранга, средняя часть которых может шарнирно поворачиваться на осях 18, 19 относительно корпуса 17 переднего суппорта. На нижних концевых частях прижимных рычагов 20, 21 укреплены башмаки или захваты 24, 25 с возможностью поворота относительно осей 22, 23 соответственно. Верхние концы прижимных рычагов 20, 21 соединены между собой посредством гидравлического цилиндра 26 открытия и закрытия. При втягивании и вытягивании штока данного цилиндра башмаки 24, 25 обжимают трубу 1 или отпускают ее. С нижней стороны внутренняя поверхность корпуса 17 переднего суппорта имеет форму дуги окружности с такой же кривизной, что и труба 1, а к нижней поверхности центральной части корпуса прикреплен контактный элемент 27, соприкасающийся с верхней поверхностью заглубленной трубы 1. Таким образом, если корпус переднего суппорта 17 разместить на трубе 1 и шток гидравлического цилиндра 26 перевести во втянутое положение, то, благодаря тому, что контактный элемент прижмется к верхней части трубы, корпус переднего суппорта зафиксирует свое положение относительно заглубленной трубы 1. Если теперь выдвинуть шток гидравлического цилиндра 26, прижимные рычаги 20 и 21 повернутся относительно осей 18 и 19 и приведут в действие башмаки 24, 25, установленные на концах прижимных рычагов 20 и 21, башмаки прижмутся с обеих сторон к трубе и передний суппорт 13 зафиксирует свое положение относительно заглубленной трубы 1.
Как показано на фиг.10, задний суппорт 14 содержит корпус 28, левый 31 и правый 32 прижимные рычаги по существу треугольной формы, шарнирно закрепленные в нижней концевой части корпуса 28 заднего суппорта на осях 29 и 30. На внутренних концевых частях каждого из прижимных рычагов 31 и 32 шарнирно закреплены на осях 33, 34 башмаки или захваты 35, 36. Внешние концевые части каждого из прижимных рычагов 31 и 32 связаны гидравлическими цилиндрами 37, 38 открытия и закрытия с верхней частью корпуса 28 заднего суппорта. При втягивании и вытягивании штоков гидроцилиндров 37, 38 башмаки 35, 36 обхватывают или отпускают трубу 1. С нижней стороны внутренняя поверхность корпуса 28 заднего суппорта сформирована таким образом, что она вплотную приближена к внешней поверхности трубы 1, а на нижней поверхности слева и справа укреплены соответствующие контактные элементы 39, 40, соприкасающиеся с поверхностью трубы 1. Таким образом, если корпус 28 заднего суппорта разместить на трубе 1 и штоки гидравлических цилиндров 37, 38 перевести во втянутое положение, то, благодаря тому, что контактные элементы прижмутся к верхней части трубы, корпус 28 заднего суппорта зафиксирует свое положение относительно трубы 1. Если теперь выдвинуть штоки гидравлических цилиндров 37, 38, прижимные рычаги 31 и 32 повернутся относительно осей 29, 30, а башмаки 35, 36, установленные на концах прижимных рычагов 31 32, прижмутся к левой и правой нижним боковым поверхностям трубы 1. При этом и задний суппорт 14 зафиксирует свое положение относительно трубы 1.
Как показано на фиг.8 и 9, средний суппорт 12 содержит корпус 41, левую 42 и правую 43 рамы роликов, прочно закрепленные болтовым соединением на корпусе 41 среднего суппорта. На каждой из рам 42 и 43 установлено множество роликов 44, прижатых сверху и снизу к левому 15 и правому 16 рельсам.
Каждый ролик 44 имеет втулку или фланец 44а, охватывающий поверхности качения ролика 44 и служащий в качестве направляющей для ролика 44 при его движении в продольном и поперечном направлениях. При такой схеме ролики 44 катятся по рельсам 15, 16, удерживая направление с помощью втулок 44а, которые находятся в контакте с боковыми поверхностями рельсов 15, 16 таким образом, что средний суппорт 12 движется назад и вперед относительно основной рамы 11.
Как показано на фиг.4 и 5, к передней и задней частям рам 42, 43 роликов прикреплены скребки 42а и 43а для удаления посторонних веществ, попавших на рельсы 15, 16, когда средний суппорт перемещается относительно основной рамы 11. Верхние части скребков 42а, 43а присоединены с помощью болтов к концевым поверхностям рам 42, 43 роликов, в то время как нижние части выгнуты наружу от рам 42, 43, так что скребки 42а, 43а имеют в поперечном сечении по существу форму бумеранга. На соответствующих верхних соединенных болтами частях скребков 42а, 43а предусмотрено удлиненное отверстие для регулировки вертикальных положений скребков 42а, 43а. Ширина скребков 42а, 43а несколько больше ширины рельс 15, 16. Этот запас скребков 42а, 43а позволяет им удалять почву и другие отложения на рельсах 15, 16 при движении среднего суппорта 12 назад и вперед и предохранять тем самым систему от проблем, которые могут возникнуть вследствие отложений, попавших между роликами 44 и рельсами 15, 16.
Как показано на фиг.8, левый 47 и правый 48 прижимные рычаги, имеющие по существу форму бумеранга, размещены перед корпусом 41 среднего суппорта, причем их центральные части шарнирно закреплены соответственно на осях 45, 46, установленных на нижних концевых частях корпуса 41 среднего суппорта. Башмаки или захваты 51, 52 шарнирно связаны с помощью осей 49, 50 с нижними концевым частями рычагов 47, 48, а верхние концы рычагов 47, 48 соединены между собой с помощью гидравлического цилиндра 53 открытия и закрытия таким образом, что при втягивании и вытягивании штока цилиндра 53 башмаки 51, 52 или прижимаются к трубе 1, или отходят от нее. В состоянии, когда передний 13 и задний 14 суппорты находятся на трубе, нижняя поверхность корпуса 41 среднего суппорта, имеющая форму дуги окружности, не касается наружной поверхности трубы 1, а находится вблизи этой поверхности.
Когда шток поршня гидравлического цилиндра 53 открытия и закрытия переводят в вытянутое положение, прижимные рычаги 47 и 48 поворачиваются на осях 45, 46, а башмаки 51 и 52 на концах соответствующих прижимных рычагов прижимаются к левой и правой боковым поверхностям трубы 1 и фиксируют положение среднего суппорта 12 относительно трубы 1.
Как показано на фиг.9, в задней части корпуса 41 среднего суппорта смонтированы вращающиеся режущие механизмы 56, 57, верхние части которых могут поворачиваться относительно осей 54, 55 с опорой на нижнюю часть корпуса 41 среднего суппорта. Верхние концевые части режущих механизмов 56 и 57 и корпус 41 среднего суппорта соединены гидравлическими цилиндрами 58, 59 открытия и закрытия. При втягивании и вытягивании штоков гидравлических цилиндров 58, 59 режущие механизмы поворачиваются на осях 54, 55.
Со стороны, с которой режущие механизмы 56 и 57 обращены к трубе 1, расположены защитные элементы 63 и 64 для трубы. При втягивании и вытягивании штоков гидравлических цилиндров 58, 59 открытия и закрытия соответствующие защитные элементы 63 и 64 перемещаются до положения непосредственного контакта с наружной поверхностью трубы 1 или до близкого к ней положения. В случае, когда режущие барабаны 61, 62 отбрасываются вверх за счет воздействия неожиданной внешней силы, или когда усилие прижимных рычагов 20, 21, 31, 32 для захвата трубы 1 уменьшается, защитные элементы 63, 64 трубы 1 соприкасаются с ее наружной поверхностью, чтобы предотвратить непосредственный контакт режущих барабанов с трубой 1.
Далее с ссылками на фиг.11, 12 приводится подробное описание конструкции вращающихся режущих механизмов по данному изобретению. Хотя ниже приводится описание одного вращающегося режущего механизма 57, конструкция другого вращающегося режущего механизма аналогична.
Режущий механизм 57 шарнирно закреплен своим верхним концом на оси 55 и содержит цилиндрический опорный корпус (держатель мотора) 70, прикрепленный к монтажной плите 69, и режущий барабан 62, удерживаемый опорным корпусом 70 с возможностью свободного вращения вокруг оси опорного корпуса 70. Режущий барабан 62 устроен следующим образом. По спирали на внешней периферийной поверхности цилиндрического тела 62а барабана, включая опорный корпус 70, расположено множество режущих элементов 62в, изготовленных из твердосплавного материала. Нижняя торцевая поверхность тела 62а барабана закрыта крышкой 62с, в то время как его верхняя торцевая поверхность открыта. По периферии опорного корпуса 70 прикреплена кольцевая пластина 71, обращенная к верхней торцевой поверхности тела 62а барабана. На ободе кольцевой пластины 71 выполнен фланец 71а, расположенный на стороне статора, который вместе с верхней кромкой, расположенной на стороне ротора, имеет противоположные поверхности с лабиринтной конструкцией, с тем, чтобы земля, вода и подобные среды не проникали внутрь барабана 62. Эти противоположные поверхности могут быть герметично уплотнены введением уплотнения.
К фланцу 70а, сформированному в нижней части опорного корпуса 70, прикреплен с помощью болта 73 корпус 72 мотора, в котором расположен гидравлический мотор 60. Гидравлические шланги 74, через которые осуществляются питание и слив масла гидравлического мотора 60, пропущены внутри опорного корпуса 70 и подключены к гидравлическим линиям 76 через релейные элементы 75, установленные на монтажной плите 69. Поэтому гидравлические шланги 74 могут быть легко отсоединены в местах расположения релейных элементов 75, благодаря чему вращающийся режущий механизм может быть выделен в виде отдельного блока.
Как показано на фиг.12, выходной вал 60а гидравлического мотора 60 связан с валом 77 солнечной шестерни посредством муфты. При этом на конце вала 77 солнечной шестерни расположена первая солнечная шестерня 78. Первая солнечная шестерня 78 входит в зацепление с первой планетарной шестерней 79, которая при повороте опирается на первое водило 80 и входит в зацепление с эпициклом 82, встроенным в корпус 81. Первое водило 80 соединено со второй солнечной шестерней 83 посредством шпонки 84, при этом вторая солнечная шестерня 83 вращается, опираясь на вал 77 солнечной шестерни. Вторая планетарная шестерня 85, которая находится в зацеплении с солнечной шестерней 83, опирается на второе водило 86 и находится в зацеплении в эпициклом 82. При этом второе водило 86 связано с корпусом 72 мотора посредством шпонки 87.
Благодаря такой конструкции при запуске гидравлического мотора 60 первая солнечная шестерня 78 начинает вращение, а первая планетарная шестерня 79, находящаяся в зацеплении с первой солнечной шестерней 78, поворачивается вокруг первой солнечной шестерни 78, находящейся одновременно в зацеплении с эпициклом 82, в результате чего происходит уменьшение скорости вращения первой ступени.
Когда первое водило 80, на которое опирается первая планетарная шестерня 79, начинает вращение, вторая солнечная шестерня 83 также начинает вращаться. Вращение второй солнечной шестерни 83 позволяет уменьшить скорость вращения второй ступени благодаря тому, что эпицикл 82 находится в зацеплении со второй планетарной шестерней 85, опирающейся на второе водило 86, при этом вращается корпус 81. Таким образом, благодаря использованию двухступенчатого планетарного редуктора уменьшается скорость вращения выходного вала 60а мотора, при этом вращается тело 62а барабана, прикрепленное с помощью болтов 88 к корпусу 81.
Кривая, огибающая концы режущих элементов 62b, закрепленных на теле 62а барабана, в средней части барабана выступает наружу. Более точно, диаметр этой кривой плавно увеличивается вдоль оси режущего барабана 62 от его верхнего конца к участку с максимальным диаметром, расположенным на определенном расстоянии от верхнего конца, например на расстоянии, равном одной трети полной длины барабана 62. Затем диаметр плавно уменьшается от участка с максимальным диаметром к нижнему концу барабана 62. Скорость уменьшения диаметра от участка с максимальным диаметром в направлении верхнего конца барабана больше, чем скорость уменьшения диаметра от участка с максимальным диаметром в направлении нижнего конца барабана. Форма кривой, огибающей режущие элементы 62b, рассчитана таким образом, что, когда штоки цилиндров 58, 59 открытия и закрытия вытянуты, другими словами, когда режущие механизмы находятся в процессе работы, верхний участок р огибающей кривой, расположенный выше средней части режущего барабана 61 (62), находится вблизи внешней периферийной поверхности трубы 1, в то время как нижний участок q, расположенный ниже средней части барабана, приближается к нижнему участку q огибающей кривой противоположного режущего барабана 62 (61). Благодаря такой конструкции удаление грунта и песка из-под трубы 1 может производиться эффективно и в полном объеме.
Как показано на фиг.4, 5 и 10, в правой и левой нижних частях корпуса 28 заднего суппорта расположены трубчатые элементы 65, 66, открытые с передней стороны. Между донными частями или задними концами трубчатых элементов 65, 66 и задней стороной корпуса 41 среднего суппорта размещены движущие гидравлические цилиндры 67, 68 со штоками 67а, 68а на соответствующих тянущих сторонах. При вытягивании штоков цилиндров 67, 68 задний суппорт 14 и средний суппорт 12 расходятся, а при втягивании штоков суппорты сближаются. Трубчатые элементы 65, 66 обеспечивают ход гидравлических цилиндров 67, 68 и закрывают наружные поверхности штоков 67а, 68а.
Далее описывается работа системы 4 для выемки грунта из-под заглубленной трубы. Перед началом работы к переднему концу стрелы 3а гидравлического экскаватора 3 прикрепляют крюк 7 и с помощью троса 8 прикрепляют к крюку 7 систему 4. Затем штоки гидравлических цилиндров 26, 37, 38, 53, 58 и 59 переводят во втянутое положение, то есть разводят башмаки 24, 25 переднего суппорта, башмаки 35, 36 заднего суппорта и башмаки 51, 52 среднего суппорта, при этом также раздвигаются режущие барабаны 61, 62 (фиг.1). Далее штоки движущих гидравлических цилиндров 67, 68 переводят во втянутое положение, показанное пунктирной линией на фиг.5, и в таком положении систему 4 устанавливают сверху на проложенную трубу 1. Следует отметить, что из того места, куда устанавливается система, земля и песок должны быть заранее удалены.
После установки системы 4 на трубе 1 выпускают штоки цилиндра 26 переднего суппорта 13 и штоки цилиндров 37, 38 заднего суппорта 14, в результате чего соответствующие башмаки 24, 25, 35, 36 прижимаются к внешней поверхности трубы 1. При этом основная рама 11 корпуса, состоящая из переднего суппорта 13, заднего суппорта 14, левого 15 и правого 16 рельсов, фиксируется на трубе 1. Одновременно с этим выпускают штоки гидравлических цилиндров 58, 59 для обеспечения возможности сближения режущих барабанов 61, 62. Таким образом барабаны 61, 62 и защитные элементы 63, 64 трубы устанавливаются в заданные положения.
Затем в этом состоянии с помощью гидравлических моторов 60 приводят во вращение режущие барабаны 61, 62 и производят выемку грунта, а именно нижнего слоя грунта, из-под трубы 1. Одновременно для продолжения операции выемки грунта выпускают штоки движущих гидравлических цилиндров 67, 68. В это время средний суппорт 12 перемещается вдоль правого 15 и левого 16 рельсов без вращения вокруг трубы 1.
Грунт, который был выкопан в результате вращения режущих барабанов 61, 62, отбрасывается наружу по диагонали вниз, по существу перпендикулярно несущим осям режущих барабанов 61, 62.
После этого штоки цилиндров 67, 68 переводят в полностью выдвинутое положение, завершая таким образом один цикл хода, а затем выпускают шток цилиндра 53 среднего суппорта 12, чтобы обеспечить прижим башмаков 51, 52 к проложенной трубе 1 и зафиксировать на ней средний суппорт 12.
Одновременно с этим втягивают штоки цилиндра 26 переднего суппорта 13 и штоки гидравлических цилиндров 37, 38 заднего суппорта 14, убирая таким образом захват башмаками 24, 25, 35, 36 трубы 1. Втягивают штоки движущих гидравлических цилиндров 67, 68, перемещая таким образом основную раму 11 корпуса вперед.
После того, как штоки движущих гидравлических цилиндров 67, 68 окажутся втянутыми в конце их хода, башмаки 24, 25, 35, 36 снова прижимаются к наружной поверхности трубы 1 и основная рама 11, состоящая из переднего суппорта 13, заднего суппорта 14, правого 15 и левого 16 рельсов, фиксируется на трубе 1, а башмаки 51, 52 отводятся из положения прижима. Далее режущие барабаны 61, 62 снова приводят во вращение при вытягивании штоков гидравлических цилиндров 67, 68 для продолжения процесса выемки грунта. Следует отметить, что ослабление троса 9 во время работы не прерывает ее, и гидравлический экскаватор 3 продвигается вперед по мере выемки грунта
В каждом вращающемся режущем механизме по изобретению гидравлический мотор 60 расположен в опорном корпусе 70 таким образом, что длина гидравлического мотора 60 в направлении его выходного вала может быть уменьшена, что приводит к уменьшению размеров и массы всей системы. Кроме того, так как гидравлический мотор 60 расположен в герметичном закрытом пространстве, он может быть защищен от постороннего воздействия земли, песка, ветра и снега. Изгибающий момент, действующий на выходной вал гидравлического мотора 60, может быть уменьшен, а центр тяжести всей системы снижен, что приводит к повышению ее устойчивости.
Гидравлические моторы и редукторы планетарного типа благодаря их конструкции могут быть легко установлены и демонтированы, таким образом, можно легко осуществить их замену как отдельных блоков, что способствует обслуживанию всей системы. Несмотря на то, что в настоящем изобретении в основном описаны гидравлические моторы, которые служат в качестве приводных средств для вращающихся режущих механизмов, вместо них могут также использоваться электродвигатели. Там, где используются электродвигатели, подключение и отключение электрических кабелей может быть легко выполнено посредством использования тех же самых релейных элементов.
Несмотря на то, что в настоящем изобретении были описаны редукторы планетарного типа, могут быть использованы также редукторы других типов. Например, каждый режущий барабан может приводиться во вращение непосредственно от мотора без редуктора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ЗЕМЛЕРОЙНЫХ РАБОТ ПОД ЗАГЛУБЛЕННЫМИ ТРУБАМИ | 2002 |
|
RU2309224C2 |
| СИСТЕМА ДЛЯ ВЫЕМКИ ГРУНТА ИЗ-ПОД ЗАГЛУБЛЕННОЙ ТРУБЫ | 2003 |
|
RU2327839C2 |
| СИСТЕМА ДЛЯ ЗЕМЛЕРОЙНЫХ РАБОТ ПОД ЗАГЛУБЛЕННЫМИ ТРУБАМИ | 2002 |
|
RU2309223C2 |
| ЭКСКАВАТОР ДЛЯ ВЫЕМКИ ГРУНТА ИЗ ПОДТРУБНОЙ ОБЛАСТИ (ВАРИАНТЫ) | 2002 |
|
RU2289657C2 |
| СПОСОБ ВСКРЫТИЯ ЗАГЛУБЛЕННОЙ ТРУБЫ (ВАРИАНТЫ) | 2002 |
|
RU2320915C2 |
| УСТРОЙСТВО ДЛЯ ЗАГЛУБЛЕНИЯ ДЕЙСТВУЮЩЕГО ПОДЗЕМНОГО ТРУБОПРОВОДА | 2014 |
|
RU2558044C1 |
| ДОЖДЕВАЛЬНАЯ МАШИНА БАРАБАННОГО ТИПА С ПОСТЕПЕННЫМ СМАТЫВАНИЕМ, СОДЕРЖАЩАЯ ЭКСЦЕНТРИЧЕСКИЙ ПОВОРОТНЫЙ МЕХАНИЗМ | 2018 |
|
RU2711978C1 |
| Устройство для наполнения банок | 2022 |
|
RU2793984C1 |
| УСТАНОВКА И СПОСОБ ДЛЯ ГРУНТОВАНИЯ ТРУБОПРОВОДА | 1994 |
|
RU2119997C1 |
| ДОЖДЕВАЛЬНАЯ МАШИНА БАРАБАННОГО ТИПА С ПОСТЕПЕННЫМ СМАТЫВАНИЕМ, СОДЕРЖАЩАЯ ТЕЛЕСКОПИЧЕСКИЙ ПОДЪЕМНЫЙ МЕХАНИЗМ | 2018 |
|
RU2714050C1 |


Изобретение относится к области горного дела и строительства, в частности к землеройным работам под заглубленными трубами для извлечения грунта из-под заглубленной трубы, проложенной под землей вблизи ее поверхности. Техническая задача - создание компактной системы для выемки грунта из-под заглубленной трубы, обеспечивающей защиту моторов и имеющей прочную и устойчивую конструкцию. Система для выемки грунта из-под заглубленной трубы содержит пару вращающихся режущих механизмов, удерживаемых с возможностью охвата сверху проложенной под землей трубы. Каждый вращающийся режущий механизм содержит цилиндрический опорный корпус, установленный с опорой на основную раму системы, и режущий барабан, удерживаемый указанным опорным корпусом с возможностью вращения. Система содержит приводной мотор для привода вращающегося режущего механизма, расположенный внутри опорного корпуса, и редукторное устройство, связанное с приводным мотором и установленное в режущем барабане. 7 з.п. ф-лы, 12 ил.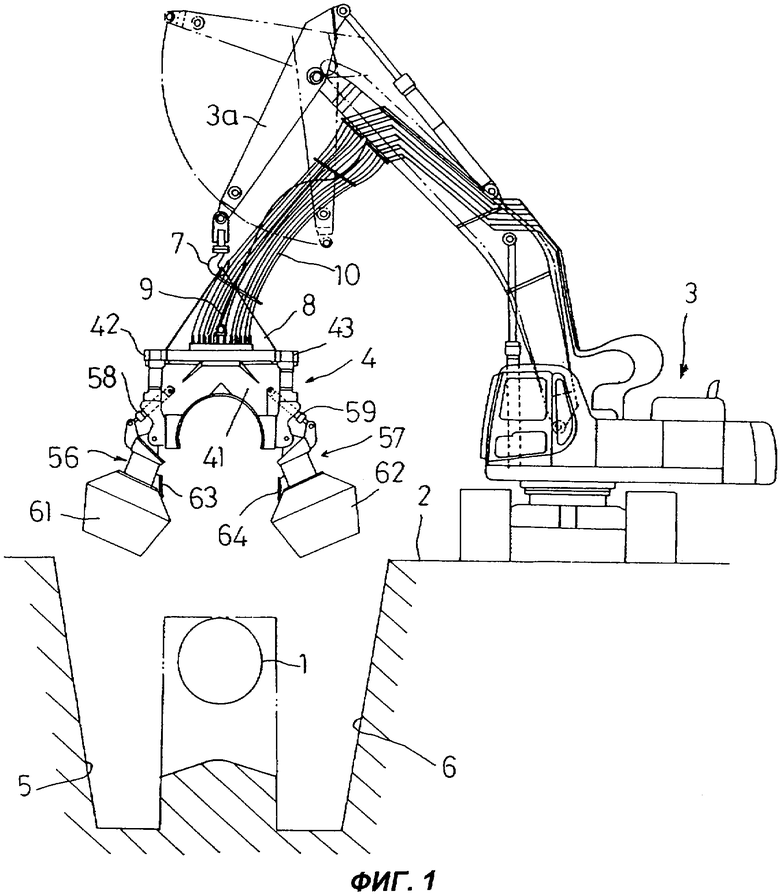
Приоритет:
| СПОСОБ ЗАГЛУБЛЕНИЯ ПОДВОДНОГО ТРУБОПРОВОДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2018579C1 |
| 0 |
|
SU155160A1 | |
| Рабочий орган трубозаглубителя | 1979 |
|
SU870606A1 |
| МАШИНА ДЛЯ ПОДКОПА ТРУБОПРОВОДА И ГУСЕНИЧНОЕ ХОДОВОЕ УСТРОЙСТВО | 1996 |
|
RU2114253C1 |
| МАШИНА ДЛЯ УДАЛЕНИЯ ГРУНТА ИЗ-ПОД МАГИСТРАЛЬНОГО НЕФТЕ(ГАЗО)ТРУБОПРОВОДА | 1999 |
|
RU2146784C1 |
| US 4301606 А, 24.11.1981 | |||
| US 6154988 А, 05.12.2000. | |||

