Изобретение относится к области военной техники, а именно к автоматизированному вооружению, устанавливаемому на наземные роботехнические комплексы военного назначения (РТК ВН), и может быть использовано для повышения эффективности ведения прицельного огня в случае его дистанционного применения.
Известна пусковая установка комплекса противотанкового управляемого реактивного снаряда (ПТУРС) боевой машины пехоты БМП-1 (Боевая машина пехоты БМП-1. Техническое описание. Военное издательство Министерства обороны СССР, М., 1972 г.), которая состоит из пускового кронштейна и направляющей. Пусковой кронштейн служит для закрепления направляющей со снарядом в боевом положении и соединения электрической цепи снаряда с бортовой сетью машины. Кронштейн крепится двумя болтами к орудию и двумя болтами к броневой маске, установленной в башне. К верхней поверхности кронштейна крепится накладка для направления и фиксации направляющей. Направляющая служит для обеспечения направленного пуска ПТУРС, а также для крепления его в укладке и установки на пусковом кронштейне.
Недостатком установки является отсутствие возможности точного наведения на цель перед пуском ПТУРС.
Известна пусковая установка комплекса противотанковой управляемой ракеты (ПТУР) боевой машины пехоты БМП-2 (Боевая машина пехоты БМП-2. Техническое описание и инструкция по эксплуатации. Военное издательство Министерства обороны СССР, М., 1986 г.), которая состоит из пускового кронштейна, направляющей, подъемного и поворотного механизма.
Недостатком пусковой установки является отсутствие возможности дистанционного наведения и пуска ПТУР.
Известна пусковая установка 9П163М-1 противотанкового ракетного комплекса (ПТРК) «Корнет» (Ангельский Р. Д. Отечественные противотанковые комплексы: Иллюстрированный справочник. - М.: ООО «Издательство ACT», 2002. - 192 с. - (Военная техника), состоящая из треножного станка с откидными опорами, вращающейся части на вертлюге, качающейся части с люлькой для ПТУР, механических приводов подъемного и поворотных механизмов, прицельного устройства, выполненного в одном блоке с лазерным излучателем канала наведения и механизма пуска ракет.
Недостатком пусковой установки является ее низкая эффективность, обусловленная отсутствием возможности дистанционного наведения ПТУР.
Известна пусковая установка 9П135М-1 ПТРК «Фагот» (Переносной противотанковый комплекс 9К111. Техническое описание и инструкция по эксплуатации (для расчета) 9К111.00.00.000 ДТО. Военное издательство Министерства обороны СССР, М., 1990 г. 44 с.) выбранная за прототип, состоящая из треножного станка 9П56М с откидными опорами, прибора 9Ш119М1, аппаратурного блока 9С474-1 и механизма пуска 9П135.01.000, соединенных между собой кабелем.
Пусковая установка 9П135М-1 ПТРК «Фагот» легко устанавливается на любых подвижных носителях, в том числе и на РТК ВН. Однако дистанционное применение ПТРК «Фагот» в составе РТК ВН осложняется наличием только механических приводов подъемного, поворотного механизмов наведения. Таким образом, недостатком прототипа является его низкая эффективность, обусловленная отсутствием автоматизации процессов наведения ПТУР на цель.
Задачей и техническим результатом, на достижение которого направлено заявляемое устройство является повышение эффективности пусковой установки 9П135М-1 ПТРК «Фагот», за счет автоматизации процессов наведения ПТУР на цель.
Технический результат достигается тем, что управление приводами подъемного и поворотного механизмов осуществляется идентичными по конструкции устройствами, состоящими из соединенных зубчатой ременной передачей большого и малого зубчатого шкива жёстко, на шпонке, закреплённых на ведущем валу привода подъемного (поворотного) механизма и на валу шагового электродвигателя, который, в свою очередь, винтовым соединением крепится на монтажной платформе и электрической связью соединяется с контроллером, управление которыми осуществляется с пульта дистанционного управления. Регулировка рабочего натяжения зубчатой ременной передачи осуществляется за счет перемещения шагового электродвигателя и его жесткой винтовой фиксацией в регулировочных пазах монтажной платформы.
Предложение поясняется рисунками, где:
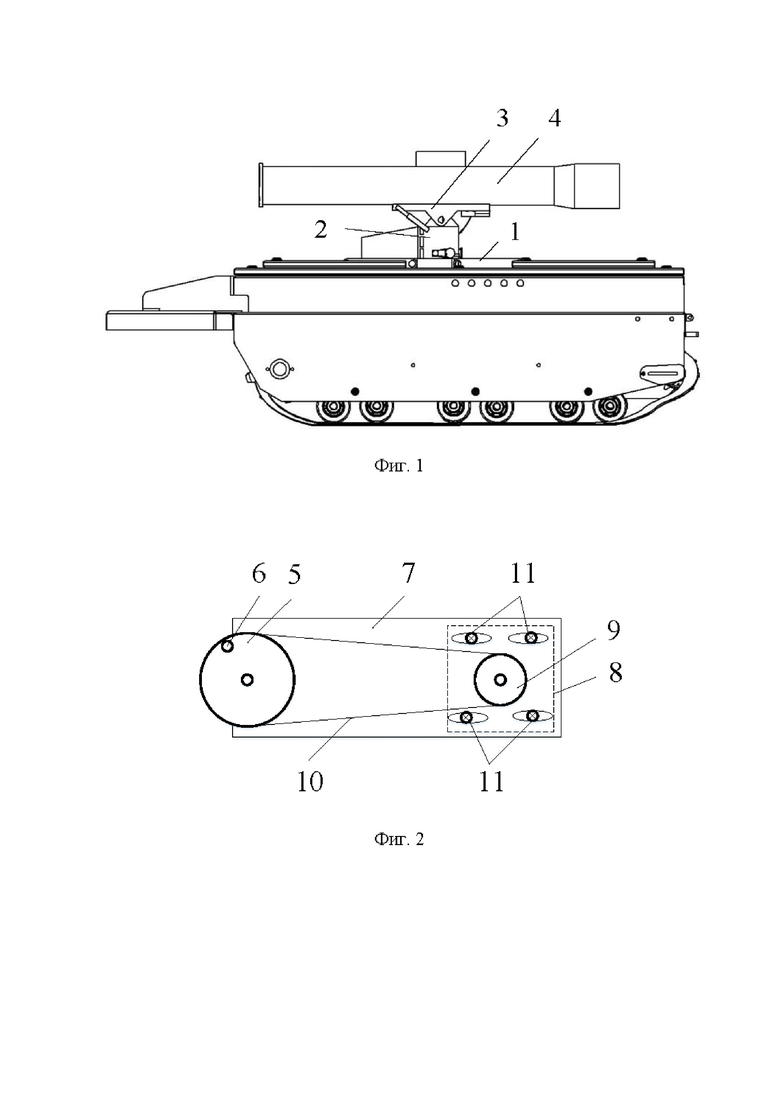
на фиг. 1 изображена пусковая установка ПТРК «Фагот» размещенная на РТК ВН;
на фиг. 2 изображена принципиальная схема устройства автоматизации подъемного (поворотного) механизма;
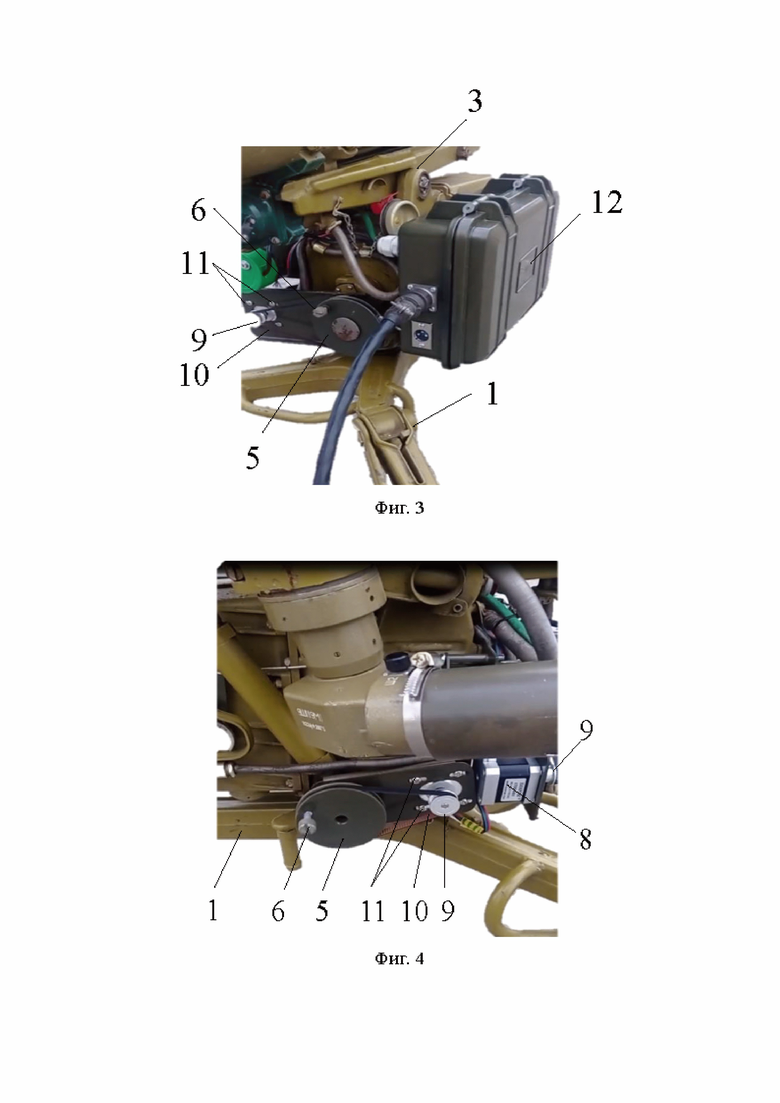
на фиг. 3 изображен общий вид пусковой установки ПТРК «Фагот» c устройством автоматизации поворотного механизма;
на фиг. 4 изображен общий вид пусковой установки ПТРК «Фагот» с устройством автоматизации подъемного механизма.
Заявленное устройство автоматизации наведения пусковой установки противотанкового ракетного комплекса «Фагот» содержит: треножный станок 1 состоящий из вращающиеся части на вертлюге 2, качающиеся части с люлькой 3, снаряда 4 в контейнере, идентичных по конструкции приводов подъемного и поворотного механизмов состоящих из большого зубчатого шкива 5 с рукояткой 6 устанавливаемых на ведущий вал привода подъемного (поворотного) механизма вместо штатного маховика с рукояткой (См. Переносной противотанковый комплекс 9К111. Техническое описание и инструкция по эксплуатации (для расчета) 9К111.00.00.000 ДТО. Военное издательство Министерства обороны СССР, М., 1990 г. Стр. 8 позиция 5 и 18), монтажную платформу 7 с размещённым на ней шаговым электродвигателем 8 на валу которого жестко, на шпонке, закреплён малый зубчатый шкив 9 и другой аппаратуры (прибора 9Ш119М1, аппаратурного блока 9С474-1 и механизма пуска 9П135.01.000, соединенных между собой кабелем на фиг. не показана)). Регулировка рабочего натяжения зубчатой ременной передачи 10 осуществляется за счет перемещения шагового электродвигателя 8 в регулировочных пазах 11 монтажной платформы 7. Режим работы шагового электродвигателя 8 регулируется контроллером 12 по команде от пульта дистанционного управления.
Заявленное устройство автоматизации наведения пусковой установки противотанкового ракетного комплекса «Фагот» функционирует следующим образом. Предлагаемое устройство может устанавливаться на пусковую установку силами расчета ПТРК «Фагот» в полевых условиях. Для этого требуется отсоединить маховик от ведущего вала подъемного (поворотного) механизма и на его место закрепить большой зубчатый шкив 11, с помощью болтов закрепить на треножном станке 1 монтажную платформу 7 с размещённым на ней шаговым электродвигателем 8. Осуществить регулировку рабочего натяжения зубчатой ременной передачи 10 за счет перемещения шагового электродвигателя 8 в регулировочных пазах 11 монтажной платформы 7.
Перед выполнением боевой задачи треножный станок 1 устанавливают на робототехнический комплекс На пусковой установке в люльке 3 размещают снаряд 4 в контейнере. На основании алгоритма, заданного оператором, происходит перемещение робототехнического комплекса в заданный район. Оператор посредством дистанционного управления (на фиг. не показан) управляет вертикальным наведением вооружения. Для этого команда на необходимый угол подъема люльки 3 с размещенным в ней снарядом 4 в контейнере с пульта дистанционного управления поступает на контроллер 12 и далее на шаговый электродвигатель 8 подъемного механизма. Вращение от вала шагового электродвигателя 8 а, следовательно, и малого зубчатого шкива 9, жестко шпонкой зафиксированного на его валу, передается посредством зубчатой ременной передачи 10 на большой зубчатый шкив 5 также шпонкой зафиксированный на валу привода подъемного механизма (см. фиг. 2 и 4).
Для горизонтального наведения вооружения используется идентичное описанному выше устройство, в той же последовательности действий. Разница заключается лишь в том, что большой зубчатый шкив 5 фиксируется на валу привода поворотного механизма (см. фиг. 3).
Предлагаемое устройство позволяет обеспечивать наведение ПТУР на цель как в ручном, с использованием рукоятки 6 режиме, так и в автоматическом, рассмотренном выше.
Таким образом, заявленное техническое решение обеспечивает повышение эффективности пусковой установки ПТРК «Фагот» за счет автоматизации процессов наведения ПТУР на цель.
| название | год | авторы | номер документа |
|---|---|---|---|
| Боевой модуль робототехнического комплекса с универсальным ложементом | 2024 |
|
RU2838709C1 |
| Способ и устройство для постановки минных заграждений | 2023 |
|
RU2834487C1 |
| Боевой модуль робототехнического комплекса военного назначения с устройством прерывания очереди при стрельбе из автоматического оружия | 2023 |
|
RU2831825C1 |
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС С НОЖНИЧНЫМ ПОДЪЕМНИКОМ БОЕВОГО МОДУЛЯ | 2023 |
|
RU2830637C1 |
| 2_Многофункциональный наземный робототехнический комплекс | 2023 |
|
RU2829371C1 |
| СПОСОБ ПОСТАНОВКИ МИННЫХ ЗАГРАЖДЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2833085C1 |
| Мобильный роботехнический комплекс | 2024 |
|
RU2828909C1 |
| УНИВЕРСАЛЬНЫЙ БОЕВОЙ МОДУЛЬ | 2013 |
|
RU2531421C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОЙ ЭВАКУАЦИИ НА БАЗЕ РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2024 |
|
RU2838648C1 |
| СПОСОБ РЕШЕНИЯ ОГНЕВОЙ ЗАДАЧИ ДИСТАНЦИОННО УПРАВЛЯЕМЫМ НАЗЕМНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ ВОЕННОГО НАЗНАЧЕНИЯ В АВТОНОМНОМ РЕЖИМЕ | 2024 |
|
RU2840168C1 |
Устройство автоматизации наведения пусковой установки противотанкового ракетного комплекса «Фагот» состоит из соединенных зубчатой ременной передачей большого и малого зубчатых шкивов, жестко, на шпонке, закрепленных на ведущем валу привода подъемного или поворотного механизма и на валу шагового электродвигателя. Шаговый двигатель винтовым соединением крепится на монтажной платформе и электрической связью соединяется с контроллером, управление которыми осуществляется с пульта дистанционного управления. Регулировка рабочего натяжения зубчатой ременной передачи осуществляется за счет перемещения шагового электродвигателя и его жесткой винтовой фиксации в регулировочных пазах монтажной платформы. Технический результат - повышение эффективности пусковой установки 9П135М-1 ПТРК «Фагот». 1 з.п. ф-лы, 4 ил.
1. Устройство автоматизации наведения пусковой установки противотанкового ракетного комплекса «Фагот», состоящего из треножного станка, содержащего вращающиеся части на вертлюге, качающиеся части с люлькой для снаряда в контейнере, механизм стопорения, приводы подъемного и поворотного механизмов с ведущими валами, прибора 9Ш119М1, аппаратурного блока и механизма пуска, соединенных между собой кабелем, отличающееся тем, что управление приводами подъемного и поворотного механизмов осуществляется идентичными по конструкции устройствами, состоящими из соединенных зубчатой ременной передачей большого и малого зубчатых шкивов, жестко, на шпонке, закрепленных на ведущем валу привода подъемного или поворотного механизма и на валу шагового электродвигателя, который, в свою очередь, винтовым соединением крепится на монтажной платформе и электрической связью соединяется с контроллером, управление которыми осуществляется с пульта дистанционного управления.
2. Устройство автоматизации наведения по п.1, отличающееся тем, что регулировка рабочего натяжения зубчатой ременной передачи осуществляется за счет перемещения шагового электродвигателя и его жесткой винтовой фиксации в регулировочных пазах монтажной платформы.
| ПЕРЕНОСНОЙ ПРОТИВОТАНКОВЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2003 |
|
RU2244893C1 |
| ПЕРЕНОСНОЙ ПРОТИВОТАНКОВЫЙ КОМПЛЕКС | 1997 |
|
RU2125699C1 |
| Машина для выработки карамели с начинкой | 1930 |
|
SU21655A1 |
| АВТОМАТИЗИРОВАННАЯ ФОРТИФИКАЦИОННАЯ РАКЕТНАЯ УСТАНОВКА | 2014 |
|
RU2591561C2 |
| Балансирный привод установки штанговых скважинных насосов | 2018 |
|
RU2688615C1 |
| Тянульное приспособление для подтягивания карамельных батонов | 1929 |
|
SU21656A1 |
| Механизм изменения направления подачи патронной ленты стрелкового оружия | 2022 |
|
RU2800835C1 |
| US 4634410 A1, 06.01.1987. | |||

