Данный способ определения курсовой ориентации предназначен для применения в системах управления движением (СУД) космического аппарата (КА).
Во время орбитального полета КА при совершении различных маневров требуется знание положения осей КА в пространстве, в частности курсового угла, определяемого как угол между проекцией плоскости орбиты КА на подстилающую поверхность и осью КА, относительно которой определяется курсовой угол (в частности, продольной оси КА).
На пилотируемых КА для определения курсового угла применяется оптический визир-ориентатор, в котором изображение подстилающей поверхности проецируется на экран. Экран имеет поворотную и неподвижную сетку, оси которой параллельны осям КА. Оператор, разворачивая поворотную сетку и совмещая ее штрих с видимым «бегом» подстилающей поверхности, определяет по шкале курсовой угол. Контролировать ориентацию КА с помощью этого визира можно только на дневной стороне орбиты и вручную.
Прототип предлагаемого изобретения не найден.
Задачей изобретения является возможность определения курсовой ориентации в автоматическом режиме на любом участке орбиты, в том числе на ночном участке.
Предлагаемый способ определения курсовой ориентации КА основан на измерении энергетической яркости точек подстилающей поверхности, расположенных на линии, перпендикулярной проекции продольной оси КА, относительно которой нужно знание курсового угла. Измерения должны проводиться, по крайней мере, дважды для точек находящихся на одной и той же линии. Значения энергетической яркости W(x) подвергаются следующей математической обработке:
1) Выбираются группы из N значений без пропусков внутри групп для каждого массива W1(x) и W2(x).
2) Для каждой выбранной группы вычисляется выборочное среднее значение по формулам:

где
 и
и  - выборочное среднее значение,
- выборочное среднее значение,
W1i и W2i - i-e значение энергетической яркости в каждой из групп.
3) Вычисляются выборочные дисперсии l11, l22 и ковариация l12 по формулам:



4) Вычисляется выборочный коэффициент корреляции Ккор по формуле:

5) Выбираются для расчетов новые группы из N значений, причем одна, например, из массива W1(x) остается прежней, а из массива W2(x) берется группа со смещением по х на одно измерение.
6) Повторяют вычисления по п. 2), 3), 4).
7) Расчеты с изменением смещения по х продолжают до тех пор, пока выборка из массива W2(x) не выйдет за пределы массива W2(x), причем смещение (L) производят как вправо, так и влево от первоначального положения.
8) Полученные значения Ккор(L) анализируются на наличие максимального значения. По величине смещения L, соответствующего максимальному значению Ккор(L), определяют значение смещения Xk:

9) Скорость "бега" подстилающей поверхности вычисляется по формуле:

где
μ - гравитационный параметр Земли,
RE - средний радиус Земли,
Н - высота орбиты (круговой) - известная расчетная величина.
10) По найденному значению Хk, скорости "бега" подстилающей поверхности ν, времени между измерениями Δt вычисляют курсовой угол по формуле:
 ,
,
где
ϕ - курсовой угол,
Xk - величина смещения функции W1(x) относительно функции W2(x),
ν - скорость "бега" подстилающей поверхности,
Δt - промежуток времени между измерениями в моменты времени t1 и t2,

Для иллюстрации на фиг.1 показана схема измерений энергетической яркости точек подстилающей поверхности.
На фигуре изображено:
T1 - положение КА на орбите в момент времени t1,
T2 - положение КА на орбите в момент времени t2,
X, Y, Z - оси КА,
 - направление вектора орбитальной скорости КА,
- направление вектора орбитальной скорости КА,
a1b1 - линия на подстилающей поверхности, на которой измеряются яркости точек в момент времени t1,
a2b2 - линия на подстилающей поверхности, на которой измеряются яркости точек в момент времени t2,
ϕ - курсовой угол.
Для повышения эффективности описываемого способа целесообразно учитывать характеристики отражательной и излучательной способности подстилающей поверхности, а также параметры поглощения и рассеивания излучения атмосферой. Вычитанием постоянной составляющей из сигналов измерений может быть повышен контраст, следовательно, и эффективность (точность) метода.
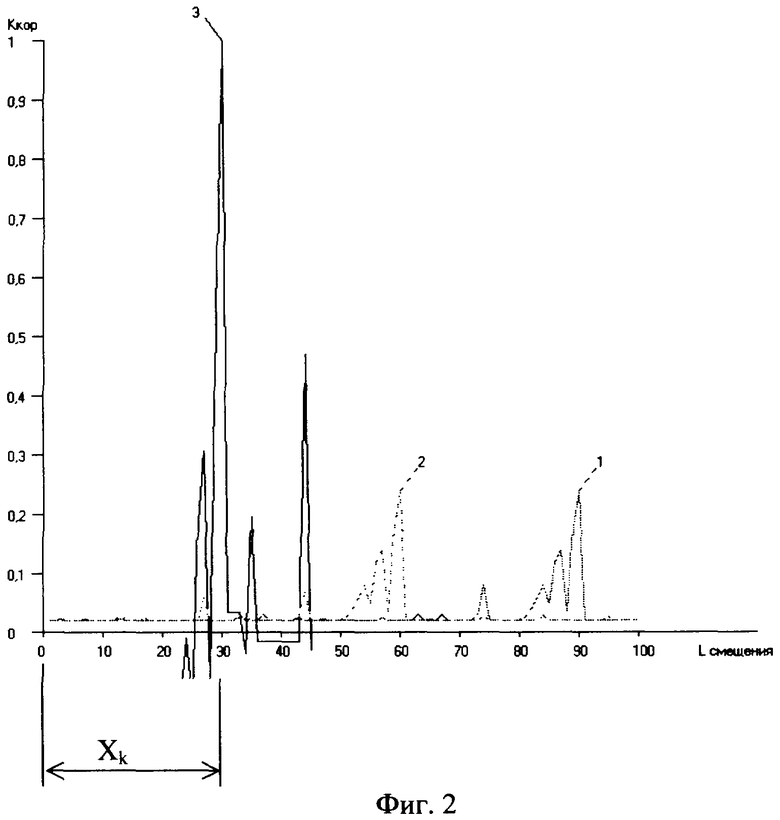
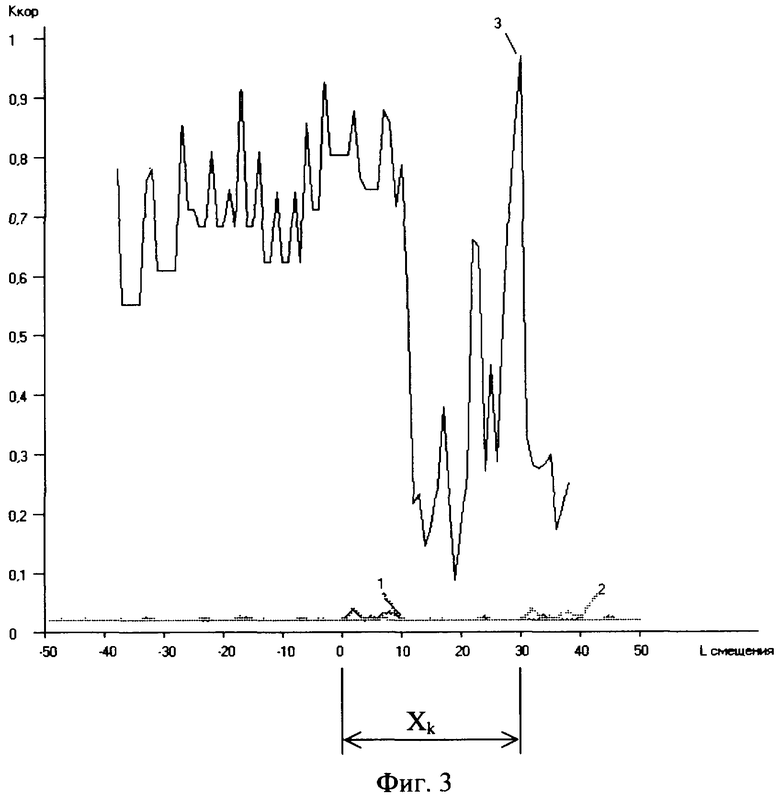
На фиг.2 и 3 приведены графики результатов расчетов для двух типов подстилающей поверхности: с высоким (фиг.2) и низким (фиг.3) контрастом подстилающей поверхности.
На фигурах изображено:
1, 2 - измеренные значения энергетической яркости (W) в моменты времени t1 и t2,
3 - выборочная функция корреляции массивов измеренных значений (W1 и W2),
Ккор - шкала функции корреляции,
Lсмещения - шкала смещения по х выборок из массивов,
Xk - величина смещения, соответствующая максимальному значению функции корреляции.
В дневных условиях для измерений может быть выбран видимый диапазон спектра. В ночных условиях, когда энергия собственного излучения подстилающей поверхности превышает отраженную энергию от других источников (звезд), целесообразно выбрать диапазон от 5 до 15 мкм, совпадающий с «окном прозрачности» атмосферы.
Описываемый способ может применяться не только при полетах по орбите Земли, но и других планет или спутников, например Марса, Луны и т.д.
Для реализации описываемого способа должен быть разработан прибор, включающий в себя:
- оптическую систему, работающую в различных спектральных диапазонах: видимом и инфракрасном (совпадающем с "окнами прозрачности атмосферы");
- приемники оптического излучения в виде ПЗС-линеек либо матриц, чувствительных в видимом и ИК-диапазонах;
- электронный узел обработки данных с приемников и вычисления корреляционных функций, скорости "бега подстилающей поверхности", курсового угла;
- блок управления;
- блок связи с СУД КА.
Литература
1. Иллюстрированная энциклопедия КОСМИЧЕСКАЯ ТЕХНИКА. К.Гэтланд. Перевод с английского канд. техн. наук С.Ф.Костромина и д-ра техн. наук В.В.Савичева под редакцией д-ра техн. наук, проф. С.Д.Гришина. Раздел «Первые космические станции».
2. Астрономические навигационные приборы. Глава из книги: Оптико-механические приборы. /С.В.Кулагин, А.С.Гоменюк, В.Н.Дикарев, В.Е.Зубарев, Е.Н.Лебедев, Г.М.Мосягин. М.: Машиностроение.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА С АППАРАТУРОЙ ДЛЯ СЪЁМКИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2019 |
|
RU2711834C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА С АППАРАТУРОЙ ДЛЯ СЪЕМКИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2019 |
|
RU2709978C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2729339C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЗЕМЛЕТРЯСЕНИЯ | 2005 |
|
RU2302020C2 |
| СПОСОБ ПРИВЯЗКИ ВЫПОЛНЕННЫХ С КОСМИЧЕСКОГО АППАРАТА СНИМКОВ ЗЕМНОЙ ПОВЕРХНОСТИ | 2019 |
|
RU2711775C1 |
| СПОСОБ ПРИВЯЗКИ ВЫПОЛНЕННЫХ С ОРБИТАЛЬНОГО КОСМИЧЕСКОГО АППАРАТА СНИМКОВ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2019 |
|
RU2712781C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ЗЕМЛЕТРЯСЕНИЙ | 2005 |
|
RU2295141C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПАРАМЕТРОВ ЗЕМЛЕТРЯСЕНИЯ | 2004 |
|
RU2255356C1 |
| СПОСОБ ОЦЕНИВАНИЯ ЛИНЕЙНОЙ СКОРОСТИ МОБИЛЬНОГО ОБЪЕКТА ОДНОПОЗИЦИОННЫМ СРЕДСТВОМ ПАССИВНОЙ РАДИОЛОКАЦИИ ВНЕ ЗОНЫ ПРЯМОЙ РАДИОВИДИМОСТИ | 2023 |
|
RU2805152C1 |
| Способ измерения гравитационного ускорения космического аппарата | 2021 |
|
RU2768557C1 |
Предлагаемый способ определения курсовой ориентации КА предназначен для применения в системах управления движением (СУД) КА. Способ основан на измерении энергетической яркости точек подстилающей поверхности, расположенных на линии, перпендикулярной проекции оси КА, для которой определяют курсовой угол на подстилающую поверхность с последующей математической обработкой результатов измерений. Измерения выполняют дважды с интервалом времени Δt между измерениями. Из обоих массивов измеренных значений энергетической яркости точек подстилающей поверхности делают две одинаковые по количеству значений выборки без пропусков внутри выборок и для них вычисляют коэффициент взаимной корреляции. Затем производится новая выборка в одном из массивов измерений со смещением вдоль линии измерений на одно значение. Вновь вычисляется коэффициент взаимной корреляции. Процедуру вычислений повторяют пока "выборка" не пройдет по всему массиву измерений. Вычисленные коэффициенты взаимной корреляции анализируют на наличие максимального значения (в пределе, равном 1). Смещение вдоль линии измерений, соответствующее максимальному значению взаимной корреляции, используют для вычисления курсового угла. Задачей изобретения является возможность определения курсовой ориентации в автоматическом режиме на любом участке орбиты, в том числе на ночном участке. 3 ил.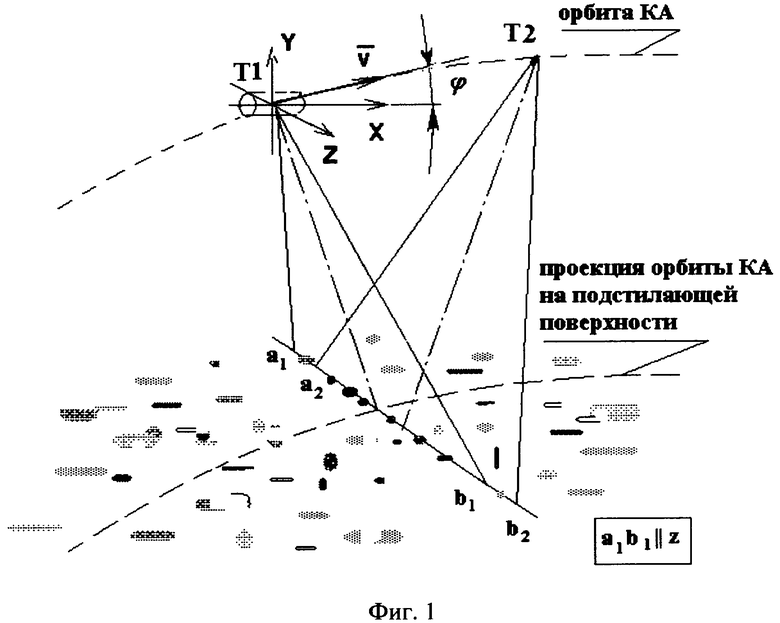
Способ определения курсовой ориентации космического аппарата, заключающийся в вычислении скорости "бега" подстилающей поверхности (v), измерении значений энергетической яркости (W) точек подстилающей поверхности дважды через промежуток времени (Δt) между измерениями для массива точек, расположенных на линии (х), перпендикулярной проекции продольной оси КА, для которой определяют курсовой угол, а курсовой угол определяют по формуле
 ,
,
где ϕ - курсовой угол,
Хk - величина смещения функции W1(x) относительно функции W2(x), величину смещения (Хk) определяют по положению, при котором будет наибольшая корреляция функций W1(x) и W2(x).
W1(x) - функция зависимости энергетической яркости точек подстилающей поверхности от положения на линии х в момент измерения t1,
W2(x) - функция зависимости энергетической яркости точек подстилающей поверхности от положения на линии х в момент измерения t2,
Δt=t2-t1,
за начало отсчета на линии х для каждой функции принимается точка пересечения линии х с проекцией оси КА, для которой определяется курсовой угол в моменты времени t2 и t1,
ν - скорость "бега" подстилающей поверхности,
Δt - промежуток времени между измерениями,
скорость "бега" подстилающей поверхности вычисляется по формуле
где μ - гравитационный параметр Земли,
RE - средний радиус Земли,
Н - высота орбиты (круговой) - известная (расчетная) величина.
| US 5305974 А1, 26.04.1994 | |||
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ С ПОМОЩЬЮ СИЛОВЫХ ГИРОСКОПОВ И РЕАКТИВНЫХ ДВИГАТЕЛЕЙ, РАСПОЛОЖЕННЫХ ПОД УГЛОМ К ОСЯМ СВЯЗАННОГО БАЗИСА | 2001 |
|
RU2197412C2 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1995 |
|
RU2083993C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА | 2004 |
|
RU2276384C2 |

