Изобретение относится к области пассивной радиолокации и может быть использовано для оценки скоростных характеристик мобильных объектов, находящихся вне зоны прямой радиовидимости и осуществляющих передачу сигналов их бортовых радиоэлектронных средств через нерегенеративный спутниковый ретранслятор, размещаемый на геостационарной орбите.
Достигаемым техническим результатом является возможность оценки скоростных параметров движения мобильных объектов вне зоны прямой радиовидимости однопозиционным средством пассивной радиолокации, путем технического анализа радиосигналов, ретранслируемых спутником-ретранслятором (CP) на геостационарной орбите (ГСО).
Получение информации о скорости движущихся объектов в ходе контроля воздушной (космической) обстановки обычно производится техническими средствами активной радиолокации на основании анализа сдвига частоты зондирующего сигнала вследствие возникновения эффекта Доплера, в условиях нахождения объекта в ограниченной зоне обнаружения радиолокационной станции (РЛС) [1 - Теоретические основы радиолокации. Под ред. Я.Д. Ширмана. М., Советское радио, 1970].
Необходимо отметить, что применение пассивной радиолокации при решении данных задач может быть более предпочтительным, ввиду известных преимуществ, к которым относятся: скрытность функционирования, снижение затрат на обеспечение электроэнергией, уменьшение сложности и стоимости технических средств по сравнению с активными РЛС.
Средствами пассивной радиолокации в условиях предварительно известных характеристик сигналов, задаваемых передающей аппаратурой, определение скорости движения мобильного объекта может также осуществляться путем вычисления доплеровского смещения частоты принимаемого сигнала. Однако данный подход невозможен в условиях априорной неопределенности частотно-временных параметров сигналов и технических характеристик бортовых радиоэлектронных средств (РЭС) мобильных объектов.
Известны способы определения скоростных характеристик движения мобильных объектов в воздушно-космическом пространстве при неизвестных параметрах сигналов бортовых РЭС средствами пассивной радиолокации. Основой таких способов является анализ разницы доплеровских смещений частоты сигнала мобильного объекта [2 - Черняк B.C. Многопозиционная радиолокация. М., Радио и связь, 1993, с. 319].
Наиболее близким к заявляемому способу по технической сущности является известный «Способ пассивной однопозиционной угломерно-разностно-доплеровской локации» [3 - Пат. РФ 2617830, МПК G01S 11/00 (2006.01), опубл. 28.04.2017 г.], обеспечивающий определение скорости движения мобильного объекта, а также селекцию мобильных объектов по скорости, на основе пассивных однопозиционных измерений приращений доплеровских сдвигов частоты сигналов бортовых РЭС. Данный способ принят за прототип. В соответствии с [3] производят прием сигнала бортового РЭС, определяют его частотные параметры, выполняют ряд измерений в моменты времени ti=iT, i=0, 1, 2, 3, … - номера измерений, Т - интервал времени между измерениями, значений частоты принимаемого сигнала и угловых координат (азимута β и угла места ε) мобильного объекта. Затем, зная вид модуляции принимаемого сигнала, восстанавливают несущую частоту ƒн, формируют в моменты времени ti значения ее отсчетов и вычисляют приращения доплеровских сдвигов частоты принимаемых сигналов ΔƒД k,n=ƒHk-ƒHn, на интервалах времени Δtk,n, достаточно малых для предположения о равномерном и прямолинейном движении мобильного объекта на постоянной высоте. На основании того, что горизонтальные составляющие приращений доплеровских сдвигов частоты определяются как:

где q - значение курсового угла объекта, λ - длина волны принимаемого сигнала, модуль скорости мобильного объекта на выбранном интервале Δt4,0 вычисляют согласно формуле 
Данный способ обеспечивает вычисление скорости движения и селекцию мобильных объектов по скорости путем анализа прямых сигналов бортовых РЭС и определения угловых координат мобильных объектов, в условиях их удаления от средств пассивной радиолокации на расстояния, не превышающие дальность прямой радиовидимости.
Однако, требования к современным системам управления и мониторинга воздушной (космической) обстановки предопределяют необходимость получения информации о скоростных характеристиках мобильных объектов, удаленных от средств пассивной радиолокации на значительные расстояния, превышающие дальность прямой радиовидимости. При этом для формирования исходных данных анализа воздушной (космической) обстановки наряду с точным определением скорости мобильных объектов применяется оценка скоростных параметров, позволяющая проводить сравнение мобильных объектов, например, выявлять высокоскоростные летательные аппараты и т.д. [4 - Корабельников А.П., Криницкий Ю.В. Тенденции применения сил и средств воздушного нападения и направления совершенствования противовоздушной обороны. Военная мысль, 2021, №2].
При этом необходимо отметить, что для обеспечения связи, передачи сигналов управления и телеметрии мобильных объектов широко применяются спутниковые системы ретрансляции данных (ССРД). Данные системы преимущественно обеспечивают передачу сигналов бортовых РЭС летательных аппаратов, движущихся в атмосфере Земли и на низких околоземных орбитах, для связи с наземными абонентскими терминалами (HAT) [5 - Михайлов, Р.Л. Описательные модели систем спутниковой связи как космического эшелона телекоммуникационных систем специального назначения: монография. СПб., Наукоемкие технологии, 2019, ISBN 978-5-6044036-4-8].
Таким образом, недостатком способа-прототипа является отсутствие возможности получения информации о скорости движения мобильного объекта вне зоны прямой радиовидимости и необходимость приема прямых сигналов бортовых РЭС. Возможность анализа сигналов бортовых РЭС, передаваемых через CP, в данном способе не рассматривалась.
Для достижения технического результата изобретения предлагается описанный в способе-прототипе подход, заключающийся в измерении разности несущих частот сигнала в различные моменты времени, применить не к прямым сигналам бортовых РЭС мобильных объектов, а к передаваемым в канале «СР-НАТ» спутниковой системы нерегенеративной ретрансляции, с учетом известных пространственных характеристик орбитальной позиции CP на ГСО, ограниченной области пространства, в которой находятся траектории движения мобильных объектов, обслуживаемых ССРД, и особенностей нерегенеративной ретрансляции радиосигналов, что является основным отличием заявляемого способа.
Основным преимуществом предлагаемого способа является возможность расширения зон эффективного функционирования средств пассивной радиолокации.
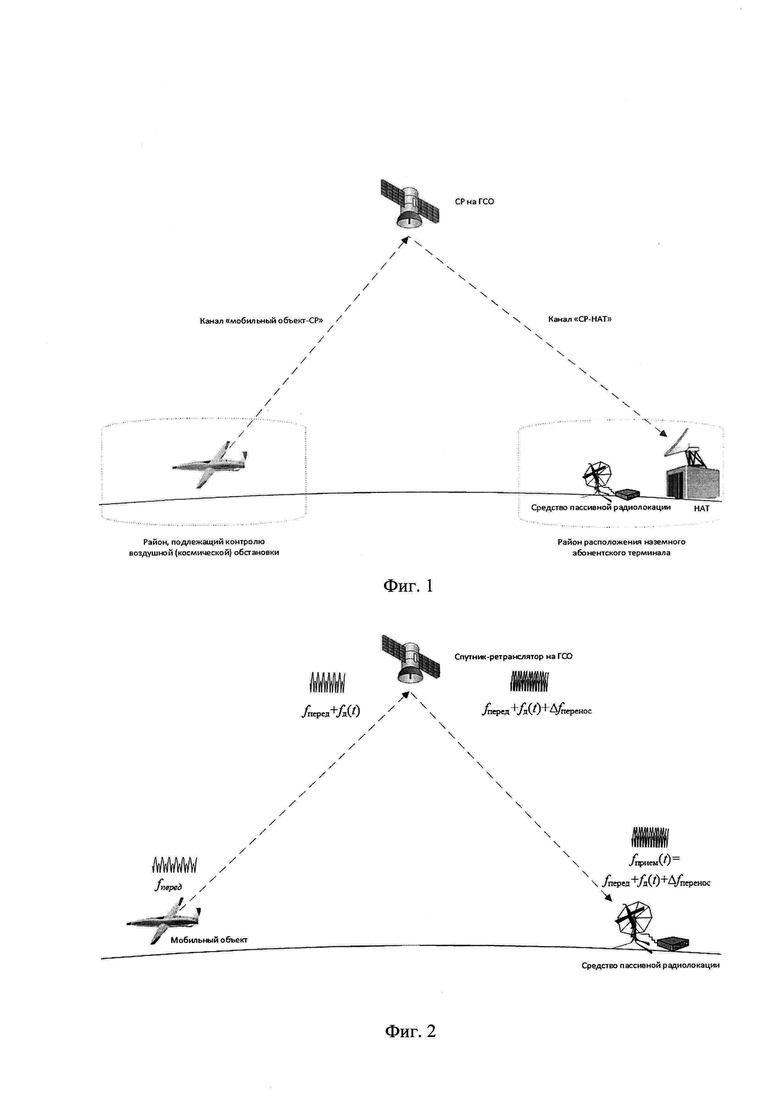
Предлагаемый способ предусматривает размещение однопозиционного наземного (надводного) технического средства пассивной радиолокации на поверхности Земли в области приема сигналов канала «СР-НАТ» ССРД, обеспечивающей передачу сигналов бортовых РЭС мобильных объектов из района, подлежащего контролю воздушной (космической) обстановки, в район расположения HAT (фиг. 1). Средство пассивной радиолокации выполняет поиск сигналов в заданном диапазоне частот. При обнаружении сигнала проводится его прием и обработка, в ходе которой определяется центральная частота спектра, рассматриваемая как несущая частота сигнала. Частота сигнала, принимаемого средством пассивной радиолокации, связана с частотой сигнала, передаваемого бортовым РЭС мобильного объекта (фиг. 2):

где ƒприем(t) - частота принимаемого сигнала, ƒперед _ частота сигнала, передаваемого бортовым РЭС, ƒд(t) - доплеровский сдвиг частоты сигнала вследствие движения мобильного объекта относительно CP, Δƒперенос - величина частотного переноса сигнала в системе ретрансляции, ξ(t) - аддитивная совокупность шумов каналов связи системы ретрансляции.
За время приема сигнала производится накопление массива значений принимаемой частоты: F={ƒприем(t1), ƒприем(t2), …, ƒприем(tN)}, измеренных через интервал времени T=tn-tn-1,  определяемый возможностями преобразующей аналогово-цифровой аппаратуры средства пассивной радиолокации. Размер массива (количество измерений N) выбирается исходя из статистически прогнозируемого времени приема сигнала, отношения сигнал/шум (ОСШ) в канале связи, частоты дискретизации аналогово-цифрового преобразователя средства пассивной радиолокации и подлежит точному определению в ходе настройки аппаратуры, реализующей предлагаемый способ в актуальных условиях радиоэлектронной и воздушной (космической) обстановки.
определяемый возможностями преобразующей аналогово-цифровой аппаратуры средства пассивной радиолокации. Размер массива (количество измерений N) выбирается исходя из статистически прогнозируемого времени приема сигнала, отношения сигнал/шум (ОСШ) в канале связи, частоты дискретизации аналогово-цифрового преобразователя средства пассивной радиолокации и подлежит точному определению в ходе настройки аппаратуры, реализующей предлагаемый способ в актуальных условиях радиоэлектронной и воздушной (космической) обстановки.
Затем массив F используется для вычисления методами численного дифференцирования массива W={w1, w2, …, wk}, k=N-1 значений скорости изменения несущей частоты (СИНЧ) принимаемого сигнала, при этом

Вычисленные значения СИНЧ позволяют оценить скорость мобильного объекта. Данное утверждение поясняется следующим:
производная по времени функции несущей частоты принимаемого сигнала согласно физическому смыслу понятия производной функции определяет скорость изменения данного параметра:

где Δt - временной интервал, на котором прослеживается приращение несущей частоты Δƒприем(t).
При малых значениях Δt для каждого вычисляемого значения СИНЧ возможна аппроксимация производной соотношением [6 - Бахвалов Н.С., Жидков Н.П., Кобельков Г.М. Численные методы. М.: Бином. Лаборатория знаний, 2003]:

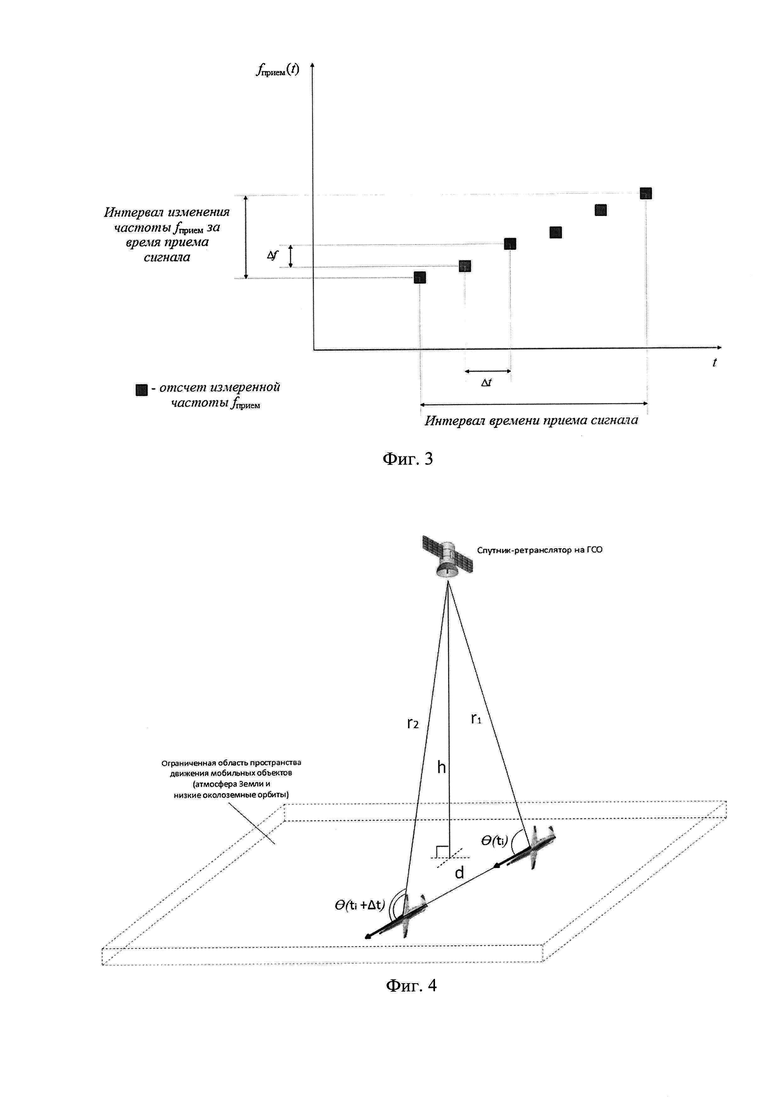
Наглядное пояснение значения СИНЧ в частотно-временной области представлено на фигуре 3.
Приращение несущей частоты Δƒприем(ti)=ƒприем(ti+1)-ƒприем(ti),  согласно (1) без учета шумов определяется как изменение доплеровского сдвига:
согласно (1) без учета шумов определяется как изменение доплеровского сдвига:

где ν - линейная скорость движения мобильного объекта, с - скорость распространения электромагнитного излучения в среде, θ - угол между вектором скорости мобильного объекта и направлением на СР.
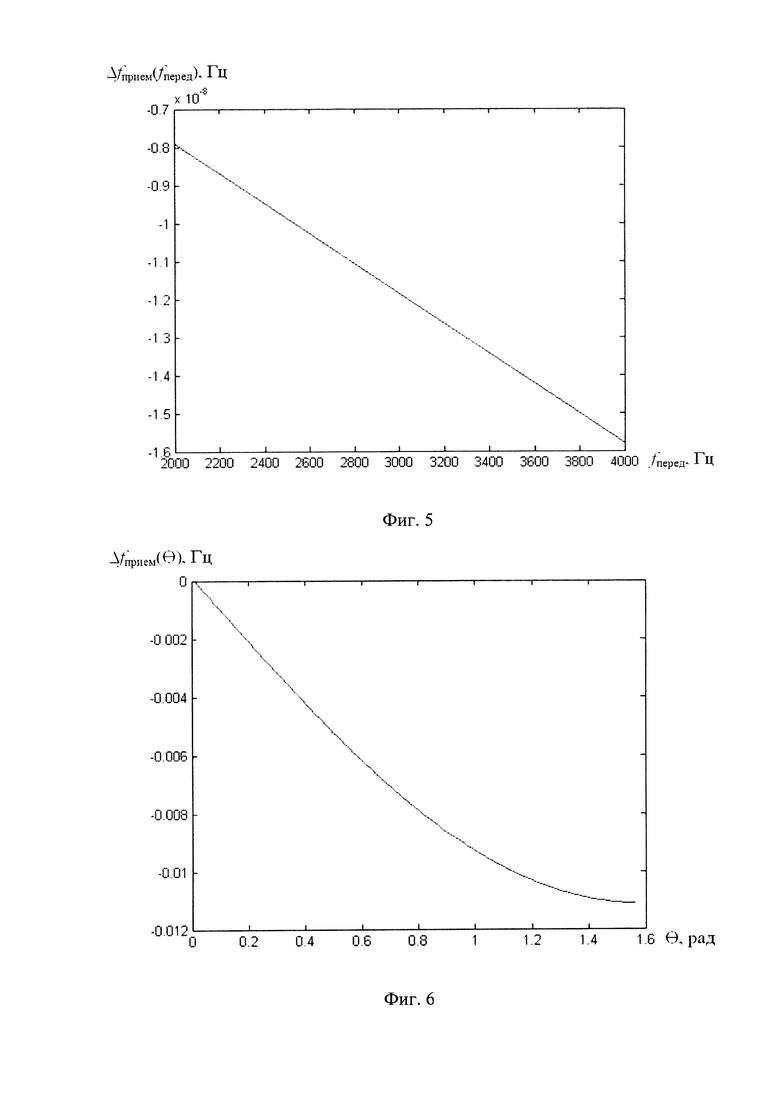
Геометрическое представление рассматриваемой задачи (фиг. 4), с учетом реальных значений пространственных параметров взаиморасположения CP и мобильного объекта, позволяет установить, т.к. d<<ri, r2 и h≈r1, r2, следующее отношение:

А приращение несущей частоты, соответственно, может быть представлено в виде:

Анализ формулы (7) методом численного моделирования (фиг. 5, 6, 7) показал, что основным фактором, влияющим на изменение величины Δƒприем(ti), является линейная скорость мобильного объекта ν.
Для обеспечения статистической достоверности результатов оценки скорости мобильного объекта производится анализ не одного приращения несущей частоты Δƒприем(ti) за интервал времени Δt, а массива W, элементы которого, согласно (2) и (4) равны:

Вычисление массива W, описывающего СИНЧ, проводится для сигналов бортовых РЭС всех мобильных объектов, использующих СР. Сравнение полученных данных друг с другом, а также с эталонными значениями, полученными в ходе моделирования, позволяет оценить скоростные параметры движения мобильных объектов, находящихся на значительном удалении от средства пассивной радиолокации, что может использоваться в системах управления движением и мониторинга воздушной (космической) обстановки гражданского и военного назначения.
Реализация данного способа и программно-аппаратного обеспечения средства пассивной радиолокации на его основе не имеет сложностей при современном уровне развития радиоэлектроники, что обеспечивает промышленную применимость изобретения.
Таким образом, использование предложенного способа обеспечивает возможность оценки скорости мобильных объектов путем вычисления СИНЧ сигналов бортовых РЭС, передаваемых через нерегенеративный спутниковый ретранслятор, размещаемый на ГСО, при удалении однопозиционного технического средства пассивной радиолокации от района движения мобильных объектов на расстояние, превышающее дальность прямой радиовидимости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ глобальной активно-пассивной многопозиционной спутниковой радиолокации земной поверхности и околоземного пространства и устройство для его осуществления | 2019 |
|
RU2700166C1 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ РАДИОСИГНАЛОВ СИСТЕМЫ СПУТНИКОВОЙ СВЯЗИ ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2562961C1 |
| СПОСОБ РАДИОПОДАВЛЕНИЯ СПУТНИКОВЫХ КАНАЛОВ УПРАВЛЕНИЯ | 2020 |
|
RU2754110C1 |
| СПОСОБ ЦЕНТРАЛИЗОВАННОГО КОНТРОЛЯ СОСТОЯНИЯ И МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2348551C1 |
| Способ пассивной однопозиционной угломерно-разностно-доплеровской локации перемещающегося в пространстве радиоизлучающего объекта и радиолокационная система для реализации этого способа | 2016 |
|
RU2617830C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2020 |
|
RU2749456C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2024 |
|
RU2837386C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ПО СИГНАЛАМ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ | 2012 |
|
RU2490665C1 |
| Способ обзорной пассивной однопозиционной моноимпульсной трёхкоординатной угломерно-разностно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов | 2017 |
|
RU2661357C1 |
| Способ выбора низкоорбитального спутника-ретранслятора для регистрации абонентским терминалом в системе персональной спутниковой связи | 2017 |
|
RU2660114C1 |

Изобретение относится к области пассивной радиолокации и может быть использовано для оценки скоростных характеристик мобильных объектов, находящихся вне зоны прямой радиовидимости и осуществляющих передачу сигналов их бортовых радиоэлектронных средств (РЭС) через нерегенеративный спутниковый ретранслятор, размещаемый на геостационарной орбите (ГСО). Техническим результатом является возможность оценки скоростных параметров движения мобильных объектов вне зоны прямой радиовидимости однопозиционным средством пассивной радиолокации, путем технического анализа радиосигналов спутника-ретранслятора (CP), обеспечивающего связь мобильных объектов, и наземным абонентским терминалом (НАТ). Заявленный способ заключается в размещении однопозиционного наземного или надводного средства пассивной радиолокации на поверхности Земли в области приема сигналов канала «CP-НАТ» спутниковой системы ретрансляции данных (ССРД), обеспечивающей передачу сигналов бортовых РЭС мобильных объектов из района, подлежащего контролю воздушной или космической обстановки, в район расположения НАТ. Средство пассивной радиолокации выполняет поиск сигналов в заданном диапазоне частот. При обнаружении сигнала проводится его прием и обработка, в ходе которой определяется центральная частота спектра, рассматриваемая как несущая частота сигнала. При нерегенеративной ретрансляции несущая частота сигнала в канале «СР-НАТ» отличается от частоты сигнала, задаваемой передающей аппаратурой мобильного объекта на известную фиксированную величину частотного переноса, установленную в ССРД. При анализе сигнала CP, обеспечивающего связь мобильного объекта и НАТ, средство пассивной радиолокации производит накопление массива значений несущей частоты принимаемого сигнала, который используется для вычисления методами численного дифференцирования массива значений скорости изменения несущей частоты (СИНЧ) принимаемого сигнала. Вычисленные значения СИНЧ позволяют оценить скорость мобильного объекта, т.к. она является основным фактором, влияющим на изменение приращения несущей частоты сигнала за время приема. Для оценки скорости мобильного объекта производится анализ нескольких приращений несущей частоты, получаемых при обработке всего массива значений принимаемой частоты. 7 ил.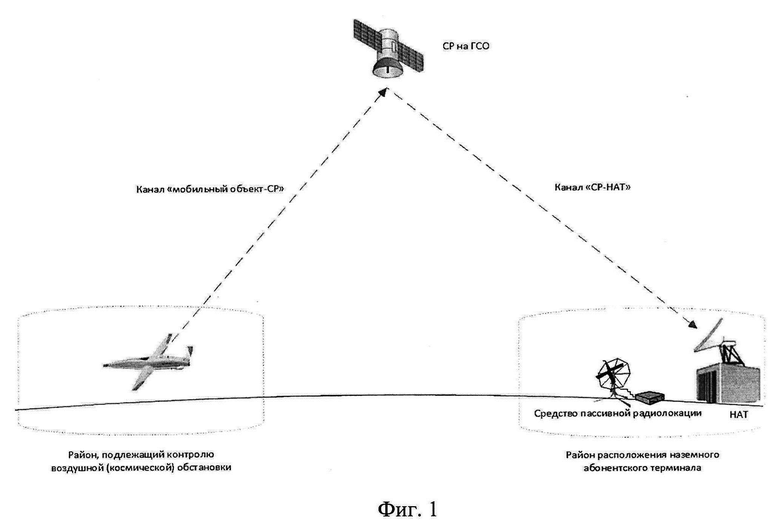
Способ оценивания скорости мобильных объектов, основанный на приеме и обработке ретранслируемых радиосигналов бортовых радиоэлектронных средств (РЭС) мобильных объектов однопозиционным наземным или надводным средством пассивной радиолокации, с последующим измерением центральных частот спектров принимаемых радиосигналов, формированием массива измеренных значений и определением величины приращения доплеровского сдвига центральных частот спектров принимаемых радиосигналов для последующей оценки скоростных параметров движения мобильных объектов, отличающийся тем, что на поверхности Земли в области приема сигналов канала «спутник-ретранслятор - наземный абонентский терминал» спутниковой системы ретрансляции данных размещают однопозиционное наземное или надводное техническое средство пассивной радиолокации, посредством которого в заданном диапазоне частот выполняют поиск сигналов бортовых РЭС мобильных объектов, ретранслированных по каналу «спутник-ретранслятор - наземный абонентский терминал» нерегенеративным спутниковым ретранслятором, размещенным на геостационарной орбите, обеспечивающим передачу сигналов бортовых РЭС мобильных объектов из района, подлежащего контролю воздушной или космической обстановки, в район расположения наземного абонентского терминала, при обнаружении сигналов производят их прием и обработку, в ходе которой определяют центральную частоту спектра ƒприем(t), рассматриваемую как несущую частоту сигнала, значение которой складывается из значений частоты сигнала, передаваемого бортовым РЭС мобильного объекта, доплеровского сдвига частоты сигнала вследствие движения мобильного объекта относительно спутника-ретранслятора, величины частотного переноса сигнала и аддитивной совокупности шумов каналов связи в системе ретрансляции, за время приема сигнала производят накопление массива значений принимаемой частоты, измеренных через интервал времени τ=tn-tn-1,  - количество измерений, затем сформированный массив значений принимаемой частоты используют для вычисления методами численного дифференцирования массива W={w1, w2, …, wk}, k=N-1 значений скорости изменения несущей частоты сигналов бортовых РЭС мобильного объекта, где
- количество измерений, затем сформированный массив значений принимаемой частоты используют для вычисления методами численного дифференцирования массива W={w1, w2, …, wk}, k=N-1 значений скорости изменения несущей частоты сигналов бортовых РЭС мобильного объекта, где  который сравнивают с заранее определенными эталонными значениями для различных скоростей движения мобильного объекта, полученными в ходе моделирования, и получают оценку скорости движения мобильного объекта на дальности, превышающей прямую радиовидимость для средств пассивной радиолокации.
который сравнивают с заранее определенными эталонными значениями для различных скоростей движения мобильного объекта, полученными в ходе моделирования, и получают оценку скорости движения мобильного объекта на дальности, превышающей прямую радиовидимость для средств пассивной радиолокации.
| Способ пассивной однопозиционной угломерно-разностно-доплеровской локации перемещающегося в пространстве радиоизлучающего объекта и радиолокационная система для реализации этого способа | 2016 |
|
RU2617830C1 |
| БУЛЫЧЕВA Ю.Г., МОЗОЛЬ А.А | |||
| Однопозиционная пассивная локация и навигация с учетом эволюции периода радиосигнала в точке приема // Радиотехника и электроника, 2021, T | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Прибор для деления угла на три части | 1922 |
|
SU468A1 |
| ДЖИОЕВ А.Л., ОМЕЛЬЧУК И.С., ТЮРИН Д.А., ФОМИНЧЕНКО Г.Г., ФОМИНЧЕНКО Г.Л | |||
| Способ пассивной однопозиционной | |||
