Изобретение относится к космонавтике, а именно к управлению ориентацией и движением центра масс космических аппаратов (КА).
Известен способ управления космическим аппаратом [1], снабженным реактивными двигателями (РД) с направленными под углом к осям связанного базиса и смещенными относительно центра масс аппарата линиями действия тяг. В этом способе к корпусу КА прикладывается требуемый управляющий момент одновременно по трем осям связанного базиса путем установки РД в параллельных плоскостях и включения тех из них, проекции векторов управляющих моментов которых на ось требуемого управляющего момента суммируются, а относительно остальных осей связанного базиса - взаимно компенсируются. Кроме того, осуществляется коррекция орбиты КА по каждому из двух заданных направлений, совпадающих с направлениями осей связанного базиса, путем приложения тяг реактивных двигателей для отработки импульсов, заданных в соответствии с направлением и величиной векторов линейной скорости коррекции по указанным осям. Причем для компенсации возмущающих моментов относительно третьей оси связанного базиса прикладывают управляющие моменты от расположенных в тех же плоскостях РД, проекции векторов моментов которых на указанные первую и вторую оси связанного базиса и проекции их сил тяг на эти оси взаимно компенсируются.
Этот способ управления позволяет уменьшить число РД и затраты топлива на коррекцию орбиты КА, но не решают важный вопрос получения максимальной скорости коррекции. Кроме того, в предлагаемом способе управление ориентацией КА в процессе коррекции орбиты с помощью РД отличается невысокой точностью, а это существенно, например, для спутников связи, точность ориентации которых должна быть не хуже 12'.
Наиболее близкий из аналогов способ управления КА с помощью реактивных исполнительных органов (см. [2]), используемый в качестве прототипа, включает определение требуемого значения скорости коррекции орбиты космического аппарата, определение интервала времени проведения коррекции (t0, tk), поддержание заданной ориентации космического аппарата с помощью силовых гироскопов (СГ) в процессе коррекции орбиты двигателями ориентации, измерение при этом значений вектора кинетического момента в системе силовых гироскопов и вектора угловой скорости космического аппарата, определение по измеренным значениям вектора кинетического момента в системе силовых гироскопов, вектора угловой скорости космического аппарата и известным значениям моментов инерции космического аппарата значений суммарного вектора кинетического момента космического аппарата  в текущие моменты времени t, в том числе и в момент времени t0, проверяют выполнение условия принадлежности значений
в текущие моменты времени t, в том числе и в момент времени t0, проверяют выполнение условия принадлежности значений  области S располагаемых значений вектора кинетического момента в системе силовых гироскопов и в случае насыщения системы СГ в момент времени tS определяют суммарное значение векторов управляющих моментов от двигателей ориентации при условии поочередного отключения каждого i-го двигателя, где i= l, 2, ...,n - номера РД, участвующих в коррекции орбиты, создают разгрузочный момент для системы силовых гироскопов двигателями ориентации, суммарный момент которых имеет наибольшую проекцию на направление, противоположное вектору
области S располагаемых значений вектора кинетического момента в системе силовых гироскопов и в случае насыщения системы СГ в момент времени tS определяют суммарное значение векторов управляющих моментов от двигателей ориентации при условии поочередного отключения каждого i-го двигателя, где i= l, 2, ...,n - номера РД, участвующих в коррекции орбиты, создают разгрузочный момент для системы силовых гироскопов двигателями ориентации, суммарный момент которых имеет наибольшую проекцию на направление, противоположное вектору  при соответствующем отключенном двигателе ориентации, а в случае, когда этот управляющий момент не является разгрузочным, для разгрузки силовых гироскопов включают ту пару двигателей ориентации, не участвующих в коррекции орбиты, момент которой имеет наибольшую проекцию на направление, противоположное вектору
при соответствующем отключенном двигателе ориентации, а в случае, когда этот управляющий момент не является разгрузочным, для разгрузки силовых гироскопов включают ту пару двигателей ориентации, не участвующих в коррекции орбиты, момент которой имеет наибольшую проекцию на направление, противоположное вектору  при этом никакой из указанных i-х двигателей не отключают, в процессе проведения коррекции орбиты и разгрузки силовых гироскопов прогнозируют изменения указанного суммарного вектора кинетического момента для случая коррекции орбиты, с учетом всех работающих указанных i-х двигателей на интервале от текущего момента времени разгрузки до расчетного момента времени окончания коррекции, суммируют указанные спрогнозированные изменения вектора с текущим значением суммарного вектора
при этом никакой из указанных i-х двигателей не отключают, в процессе проведения коррекции орбиты и разгрузки силовых гироскопов прогнозируют изменения указанного суммарного вектора кинетического момента для случая коррекции орбиты, с учетом всех работающих указанных i-х двигателей на интервале от текущего момента времени разгрузки до расчетного момента времени окончания коррекции, суммируют указанные спрогнозированные изменения вектора с текущим значением суммарного вектора  определенным на момент начала прогноза
определенным на момент начала прогноза  проверяют условие принадлежности полученных векторных сумм указанной области S и одновременно условие непринадлежности
проверяют условие принадлежности полученных векторных сумм указанной области S и одновременно условие непринадлежности  области S и, если в момент времени не выполняются оба эти условия, продолжают проводить коррекцию орбиты с одновременной разгрузкой силовых гироскопов, а если выполняется хотя бы одно из указанных условий, прекращают разгрузку силовых гироскопов за счет подключения указанного отключенного i-го двигателя к процессу коррекции орбиты или отключения указанной разгрузочной пары РД, после чего продолжают проверять выполнение условия принадлежности указанного вектора суммарного кинетического момента
области S и, если в момент времени не выполняются оба эти условия, продолжают проводить коррекцию орбиты с одновременной разгрузкой силовых гироскопов, а если выполняется хотя бы одно из указанных условий, прекращают разгрузку силовых гироскопов за счет подключения указанного отключенного i-го двигателя к процессу коррекции орбиты или отключения указанной разгрузочной пары РД, после чего продолжают проверять выполнение условия принадлежности указанного вектора суммарного кинетического момента  области S вплоть до завершения коррекции и в случае невыполнения этого условия повторяют разгрузку системы СГ при помощи двигателей ориентации, создающих указанный момент, или при помощи разгрузочной пары двигателей ориентации, не участвующих в процессе коррекции орбиты.
области S вплоть до завершения коррекции и в случае невыполнения этого условия повторяют разгрузку системы СГ при помощи двигателей ориентации, создающих указанный момент, или при помощи разгрузочной пары двигателей ориентации, не участвующих в процессе коррекции орбиты.
Недостатком способа управления, описанного в прототипе, является использование для управления КА большого числа РД (24 РД), а также и то, что не выполняется выбор тех РД для проведения коррекции орбиты, которые позволят провести ее без насыщения системы СГ, которое, как следствие, приведет к необходимости в разгрузке системы СГ с помощью РД, что не желательно, т.к. это связано с дополнительным расходом рабочего тела и ухудшением орбиты, вызванным работой РД.
Задачей, решаемой предлагаемым способом, является повышение точности управления при применении реактивных двигателей с направленными под углом к осям связанного базиса и смещенными относительно центра масс аппарата линиями действия тяг и силовых гироскопов, минимизация расхода рабочего тела и влияния на орбиту КА, обусловленного необходимостью включения РД для разгрузки накопленного СГ кинетического момента.
Поставленная задача решается тем, что в предлагаемом способе управления космическим аппаратом с помощью силовых гироскопов и реактивных двигателей, расположенных под углом к осям связанного базиса, включающем определение требуемого значения скорости коррекции орбиты космического аппарата, определение интервала времени проведения коррекции (t0, tk), поддержание заданной ориентации космического аппарата с помощью силовых гироскопов в процессе коррекции орбиты реактивными двигателями, измерение при этом значений вектора кинетического момента в системе силовых гироскопов и вектора угловой скорости космического аппарата, определение по измеренным значениям вектора кинетического момента в системе силовых гироскопов, вектора угловой скорости космического аппарата и известным значениям моментов инерции космического аппарата значения суммарного вектора кинетического момента космического аппарата  в отличие от известного способа, определяют по измеренным в момент времени t0 значениям вектора кинетического момента в системе силовых гироскопов, вектора угловой скорости космического аппарата и известным значениям моментов инерции космического аппарата начальное значение суммарного вектора кинетического момента космического аппарата
в отличие от известного способа, определяют по измеренным в момент времени t0 значениям вектора кинетического момента в системе силовых гироскопов, вектора угловой скорости космического аппарата и известным значениям моментов инерции космического аппарата начальное значение суммарного вектора кинетического момента космического аппарата  из установленных на борту космического аппарата реактивных двигателей выбирают i-e двигатели, векторы тяг которых обеспечивают заданное направление коррекции орбиты, определяют n-e группы, где n=1, 2,..., k, где k - максимальное число групп, включающих все возможные комбинации из i-х реактивных двигателей, прогнозируют изменения суммарного вектора кинетического момента
из установленных на борту космического аппарата реактивных двигателей выбирают i-e двигатели, векторы тяг которых обеспечивают заданное направление коррекции орбиты, определяют n-e группы, где n=1, 2,..., k, где k - максимальное число групп, включающих все возможные комбинации из i-х реактивных двигателей, прогнозируют изменения суммарного вектора кинетического момента  на определенном интервале времени коррекции орбиты для каждой из n-х групп, при этом учитывают влияние на космический аппарат внешних возмущающих моментов и моментов сил от каждого i-го реактивного двигателя, входящего в n-ю группу, рассчитывают суммарный вектор кинетического момента космического аппарата при работе n-й группы реактивных двигателей
на определенном интервале времени коррекции орбиты для каждой из n-х групп, при этом учитывают влияние на космический аппарат внешних возмущающих моментов и моментов сил от каждого i-го реактивного двигателя, входящего в n-ю группу, рассчитывают суммарный вектор кинетического момента космического аппарата при работе n-й группы реактивных двигателей  определяют по выполнению условия
определяют по выполнению условия  где S - область допустимых значений вектора кинетического момента для проведения коррекции орбиты, момент времени tsn выхода суммарного вектора кинетического момента для каждой из n-х групп на границу области S, определяют для каждой из n-х групп интервал времени выхода суммарного вектора кинетического момента на границу области S Δtn = tsn-t0, определяют величины импульсов коррекции для каждой из n-х групп двигателей
где S - область допустимых значений вектора кинетического момента для проведения коррекции орбиты, момент времени tsn выхода суммарного вектора кинетического момента для каждой из n-х групп на границу области S, определяют для каждой из n-х групп интервал времени выхода суммарного вектора кинетического момента на границу области S Δtn = tsn-t0, определяют величины импульсов коррекции для каждой из n-х групп двигателей  где
где  - суммарное значение проекций i-х реактивных двигателей n-й группы на направление коррекции орбиты, выбирают из условия
- суммарное значение проекций i-х реактивных двигателей n-й группы на направление коррекции орбиты, выбирают из условия  для коррекции орбиты n'-ю группу реактивных двигателей, включают для коррекции орбиты в момент времени t0 n'-ю группу реактивных двигателей, в процессе коррекции орбиты сравнивают суммарные значения, полученные для n'-й группы реактивных двигателей
для коррекции орбиты n'-ю группу реактивных двигателей, включают для коррекции орбиты в момент времени t0 n'-ю группу реактивных двигателей, в процессе коррекции орбиты сравнивают суммарные значения, полученные для n'-й группы реактивных двигателей  с текущими значениями
с текущими значениями  и в случае выполнения условия
и в случае выполнения условия  где ΔG - суммарное значение вектора кинетического момента, определяющее допустимое расхождение прогнозируемого значения с измеренным, продолжают коррекцию орбиты, в противном случае прекращают коррекцию орбиты, присваивают текущему значению времени t значение t0 и производят повторный выбор n'-й группы реактивных двигателей для коррекции орбиты указанным выше образом.
где ΔG - суммарное значение вектора кинетического момента, определяющее допустимое расхождение прогнозируемого значения с измеренным, продолжают коррекцию орбиты, в противном случае прекращают коррекцию орбиты, присваивают текущему значению времени t значение t0 и производят повторный выбор n'-й группы реактивных двигателей для коррекции орбиты указанным выше образом.
Предлагаемый способ управления КА позволит провести коррекцию орбиты без насыщения системы СГ. КА снабжается реактивными двигателями с направленными под углом к осям связанного базиса и смещенными относительно центра масс аппарата линиями действия тяг. При таком размещении РД снижается число РД (с 24 в прототипе до 8 в предлагаемом способе), а следовательно, уменьшается стоимость КА, уменьшается его масса, что позволит вывести большую полезную нагрузку ракетоносителем с теми же характеристиками, что и для аппарата, описанного в прототипе, расходуя меньше рабочего тела, увеличить тем самым срок службы КА.
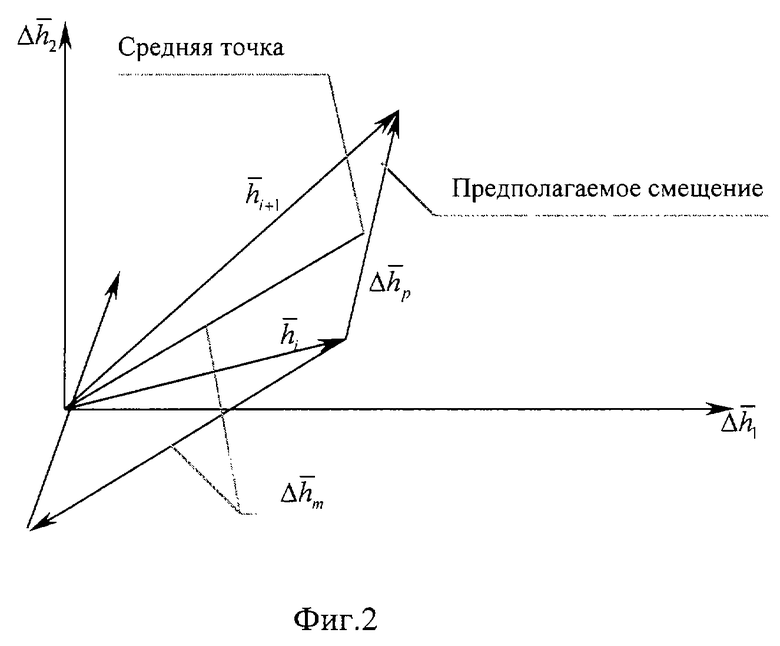
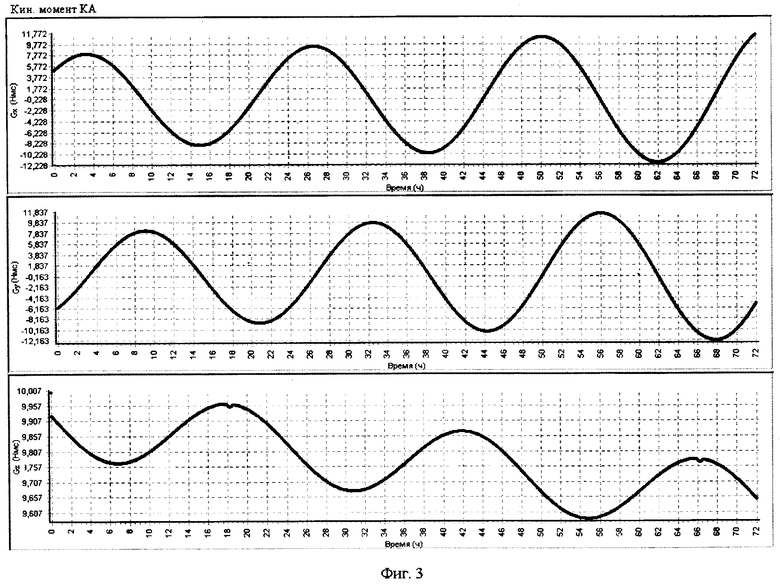
Для пояснения сущности предлагаемого способа приводятся фиг.1 - 3. На фиг. 1 изображена схема размещения блоков РД КА (в блоке может быть как один двигатель, так и несколько двигателей, создающих тягу в заданном направлении). Фиг.2 иллюстрирует маневр перевода средней точки ожидаемого смещения в начало координат. На фиг.3 изображен график изменения компонент вектора кинетического момента КА (Gx, Gy, Gz) во времени t.
В качестве примера, иллюстрирующего предлагаемый способ управления КА, рассмотрим управление геостационарным КА, снабженным восемью блоками электрореактивных РД (см. фиг. 1) при коррекции его орбиты. На фиг.1 изображен корпус КА, блоки двигателей ориентации 1-8 и жестко связанная с КА система координат  (ССК). Управление ориентацией КА осуществляется силовыми гироскопами. При удержании космического аппарата на геостационарной орбите (ГСО) возникает задача удержания его в рабочей точке с заданной точностью по долготе и широте. Решается эта задача с использованием восьми электрореактивных двигателей. С их помощью осуществляется коррекция орбиты КА и одновременно управление кинетическим моментом КА.
(ССК). Управление ориентацией КА осуществляется силовыми гироскопами. При удержании космического аппарата на геостационарной орбите (ГСО) возникает задача удержания его в рабочей точке с заданной точностью по долготе и широте. Решается эта задача с использованием восьми электрореактивных двигателей. С их помощью осуществляется коррекция орбиты КА и одновременно управление кинетическим моментом КА.
Коррекция наклонения обеспечивается с помощью работы на одном или двух интервалах маневрирования на витке. Середины этих интервалов должны быть расположены на линии узлов целевой и исходной плоскостей орбит [3], [4].
Фиг. 2 иллюстрирует маневр перевода средней точки ожидаемого смещения в начало координат. На ней введены следующие обозначения:  - маневр, который переводит среднюю точку ожидаемого смещения в начало координат,
- маневр, который переводит среднюю точку ожидаемого смещения в начало координат,  - пассивное изменение вектора наклонения
- пассивное изменение вектора наклонения  от момента между i-й и i+1-й коррекциями. Принято, что при коррекции наклонения ликвидируется только составляющая, параллельная направлению векового ухода. В этом случае вектор наклонения циклически изменяется с полугодовым периодом и амплитудой ≈0.025o. С целью минимизации наибольшего изменения вектора наклонения выбирается такой маневр
от момента между i-й и i+1-й коррекциями. Принято, что при коррекции наклонения ликвидируется только составляющая, параллельная направлению векового ухода. В этом случае вектор наклонения циклически изменяется с полугодовым периодом и амплитудой ≈0.025o. С целью минимизации наибольшего изменения вектора наклонения выбирается такой маневр  который переводит среднюю точку ожидаемого смещения в начало координат [см. фиг.1]
который переводит среднюю точку ожидаемого смещения в начало координат [см. фиг.1]
где  - пассивное изменение вектора
- пассивное изменение вектора  от момента между i-й и i+1-й коррекциями. Величина потребного импульса определяется по формуле
от момента между i-й и i+1-й коррекциями. Величина потребного импульса определяется по формуле
где vkp - скорость спутника на ГСО.
При коррекции истинного вектора наклонения оптимальный интервал между коррекциями 3-5 суток, при коррекции векового смещения - 1-3 суток. Увеличение интервала коррекции нежелательно, т.к. это приведет к существенному увеличению баллистических потерь вследствие большой длительности активных участков.
Коррекция эксцентриситета и периода обращения обеспечивается трансверсальными импульсами.
Рабочий интервал долгот Δλ определяется из условия
Δλ = Δλзад-2δemax-Δλ
где Δλзад = 0,1° - заданный интервал удержания КА по долготе; δemax - максимальная амплитуда колебаний эксцентриситета относительно среднего значения (≈10-4); Δλ
Параметры одноимпульсной коррекции сидерического периода обращения определяются из условия исправления λ и уменьшения эксцентриситета на витке, где Δλ выходит за заданные границы. Угловая длительность активного участка определяется по формуле
ζ = -1,4λ(tTp)Wnaωe (4),
где ωe = 0,7292*10-4 рад/сек - угловая скорость Земли; Wn - среднее трансверсальное ускорение; tТр - момент начала коррекции.
Величина потребного импульса скорости определяется по формуле
Курс тяги определяется из условия:
ψ=0, при ζ>0
ψ=Pi, при ζ<0 (6)
Для удержания эксцентриситета в принятых границах проводится двухимпульсная коррекция, параметры которой следующие:
При планировании коррекцию наклонения орбиты необходимо разносить по времени с коррекцией эксцентриситета. Для уменьшения баллистических потерь коррекции в рабочей точке нужно проводить с минимальной периодичностью (1-2 дня).
Обозначим через i=1, 2, 3 номера осей связанного базиса. Пусть проекции векторов управляющих сил (Рi) и моментов (Мi) на эти оси от каждого блока двигателей имеют вид:
- для блока 1 - (0, Р2, Р3), (-M1, -M2, М3);
- для блока 2 - (0, P2, Р3), (-M1, M2, -М3);
- для блока 3 - (0, -Р2, Р3), (M1, -M2, -М3);
- для блока 4 - (0, -Р2, Р3), (M1, M2, М3);
- для блока 5 - (0, -P2, -Р3), (-M1, M2, -М3);
- для блока 6 - (0, -Р2, -Р3), (-M1, -M2, М3);
- для блока 7 - (0, P2, -Р3), (M1, M2, М3);
- для блока 8 - (0, P2, -Р3), (M1, -M2, -М3).
Предположим, что коррекцию орбиты нужно проводить в направлении оси -Y связанного базиса (ССК). Для этой цели можно использовать блоки двигателей 3, 4, 5, 6 (см. фиг.1), создающие тягу в заданном направлении. Оптимальный вариант - использовать все перечисленные ранее блоки двигателей, создающих тягу в заданном направлении. В этом случае создается максимальная тяга по оси -Y, а возмущения от работы этих двигателей, вызванные смещением векторов тяг относительно центра масс КА, взаимно компенсируются. В случае, когда использование всех перечисленных двигателей невозможно, можно использовать, например, блоки РД 3, 4, 5, или 4, 5, 6, или 3, 5, 6. Но в этом случае возникнут нескомпенсированные возмущающие моменты по всем осям. Более предпочтительно использовать в таком случае пару блоков РД. Анализируя представленные проекции векторов тяг и моментов на оси связанного базиса можно сделать вывод, что для коррекции орбиты по соответствующим направлениям 2-й и 3-й осей ССК достаточно использовать, например, пару блоков РД, которая создает тягу в требуемом направлении и взаимно компенсирует тягу в другом направлении. В случае указанного выше размещения блоков РД это следующие пары блоков РД:
1) для коррекции в направлении оси Y: 1-й и 8-й; 2-й и 7-й;
2) для коррекции в направлении оси -Y: 3-й и 6-й; 4-й и 5-й;
3) для коррекции в направлении оси Z: 1-й и 4-й; 2-й и 3-й;
4) для коррекции в направлении оси -Z: 5-й и 8-й; 6-й и 7-й.
Нужно отметить, что при таком выборе блоков РД в каждом из перечисленных ранее случаев возникает нескомпенсированный момент, наличие которого приводит к накоплению кинетического момента системой СГ, поддерживающей требуемую ориентацию КА. Так, например, при коррекции орбиты в направлении оси -Y с использованием 3-го и 6-го блоков РД сила от их работы будет равна
РY=-2Р2 (8),
моменты от работы этих блоков РД по осям Х и Z взаимно компенсируются, а момент по оси Y равен
МY=-2М2 (9)
Возникает задача компенсации этого момента, т. к. его наличие может привести к насыщению СГ и, как следствие, необходимости включения других блоков РД для ее разгрузки. Сделать это можно следующим образом. Планируя проведение коррекции, можно смоделировать на заданном временном интервале суммарный момент, воздействующий на КА, и, учитывая динамику его изменения, выбирать ту пару блоков РД, которая будет создавать момент по соответствующей оси ССК, имеющий противоположное направление по сравнению с моментом от пары блоков РД, и соответственно частично компенсировать его. Частично потому, что момент от работающих блоков РД будет значительно больше, чем момент от внешних сил, действующих на КА (гравитационный, аэродинамический, силы светового давления, магнитный и т.д.). Тем не менее скорость накопления кинетического момента СГ будет ниже, и это позволит при двухимпульсной коррекции через полвитка, например, выбрав блоки РД, создающие возмущающий момент в потивоположном направлении, изменить направление накопления кинетического момента СГ на противоположное. В рассматриваемом примере это блоки РД 4 и 5, создающие ту же тягу по оси Y, что и предыдущая пара блоков
РY=-2Р2 (10),
но момент от работы этих блоков РД по оси Y будет равен
МY=2М2 (11).
На фиг.3 представлен график накопления кинетического момента в процессе полета геостационарного спутника связи, полученный в результате интегрирования следующих уравнений движения геостационарного спутника связи.




Здесь  - полный кинетический момент КА;
- полный кинетический момент КА; - кинетический момент системы СГ;
- кинетический момент системы СГ; - угловая скорость КА;
- угловая скорость КА; - соответственно гравитационные моменты, вызванные влиянием на ССС гравитационных полей Земли, Луны и Солнца;
- соответственно гравитационные моменты, вызванные влиянием на ССС гравитационных полей Земли, Луны и Солнца; - магнитный момент, обусловленный взаимодействием магнитного поля Земли и собственного магнитного момента КА;
- магнитный момент, обусловленный взаимодействием магнитного поля Земли и собственного магнитного момента КА; - орты векторов Земля - КА, Солнце - КА, Луна-спутник;
- орты векторов Земля - КА, Солнце - КА, Луна-спутник; - тензор инерции КА;
- тензор инерции КА;
μE = 3,986032•105 км3/сек2;
μS = 1,32715445•1011 км3/сек2;
μM = 4,90264•105 км3/сек2
- гравитационные параметры Земли, Луны и Солнца;
RE, RS, RM - радиус-векторы Земли, Луны и Солнца; - момент от силы светового давления
- момент от силы светового давления  которая возникает при попадании потока солнечного света на спутник и при его отражении;
которая возникает при попадании потока солнечного света на спутник и при его отражении;
S - площадь поперечного сечения КА;
Е0 - мощность потока солнечного излучения;
с - скорость света;
r* - средний радиус орбиты Земли;
Δ - расстояние от КА до Солнца;
k - коэффициент отражения света поверхностью КА; - собственный магнитный момент КА;
- собственный магнитный момент КА; - магнитное поле Земли.
- магнитное поле Земли.
Как показала практика, прогноз накопления кинетического момента КА, полученный при решении уравнений (12) для геостационарного спутника связи "Ямал", дает хорошие результаты.
Нетрудно сделать вывод, что, находясь на нисходящей ветви графика кинетического момента КА, для уменьшения влияния по этой оси возмущающего момента от работы в процессе коррекции орбиты РД
нужно использовать для коррекции в направлении оси -Y ту пару блоков РД, которая приводит к возникновению момента по +Y, т.е. пару блоков РД 4 и 5, а находясь на восходящей ветви графика, соответственно пару 3 и 6. Но, учитывая, что возмущающий момент от блоков РД существенно больше, чем возмущающий момент от внешних сил, нельзя не учитывать исходное значение кинетического момента КА, т.к. это может привести к быстрому накоплению кинетического момента и, как следствие, к необходимости его разгрузки.
Например, пусть необходимо провести коррекцию орбиты КА в направлении оси -Y начиная с момента время t0=18 ч. Пусть для проведения коррекции орбиты КА необходимо сообщить ему один импульс РД длительностью в Δt=1 ч. Т.к. в этот момент времени вектор суммарного кинетического момента КА равен
и имеет приращение ΔGY отрицательного знака, то логично выбрать для коррекции блоки РД 4 и 5 (см. фиг.3), дающие положительный возмущающий момент относительно оси Y (11) и имеющие следующие параметры (без учета знаков): Р2=0,0265 Н, М2=0,00237 Нм. Это соответствует, например, использованию электрореактивных двигателей М70-СПД.
Сила, с которой данные блоки РД воздействуют на КА, равна согласно (10)
РY=-2Р2=0.053 Н (10/),
а нескомпенсированный момент по оси Y согласно (11)
МY=2М2=0,00474 (11/).
Приращение кинетического момента КА, вызванное влиянием внешних возмущающих факторов (гравитационным моментом, магнитным и т.д.) за это время согласно фиг.3 составит
а приращение кинетического момента КА, вызванное работой РД ΔGYD за этот промежуток времени будет равно
Т. о., к концу процесса коррекции орбиты кинетический момент КА составит величину, равную
Кроме того, из анализа графиков на фиг.3 и направления действия тяг блоков РД видно, что в процессе коррекции орбиты данными блоками РД выхода суммарного вектора кинетического момента за пределы допустимой области не произойдет.
В случае, когда суммарный вектор кинетического момента КА не выходит за пределы области допустимых значений, проведение одноимпульсной коррекции орбиты КА оправдано, т.к. выполняется условие движения вектора кинетического момента КА во время проведения коррекции в области допустимых значений. Если же суммарный вектор кинетического момента КА выходит за пределы области допустимых значений, то коррекция проводится до момента времени tsn после чего прекращается и выполняется выбор новых РД. Можно, например, сообщить КА следующий импульс, для работы на следующем интервале коррекции пару двигателей, создающих возмущающий момент, вектор которого противоположен вектору возмущающего момента, создаваемому работой РД на предыдущем интервале коррекции. В нашем случае это блоки двигателей 3 и 6. Начало второго интервала коррекции орбиты нужно проводить через полвитка после первого интервала. Т. о., при двухимпульсной коррекции орбиты можно нивелировать влияние на гиросистему, вызванное работой РД.
Предлагаемый способ коррекции орбиты КА хотя может увеличить время коррекции по сравнению с прототипом, но позволит увеличить срок эксплуатации КА за счет уменьшения расхода рабочего тела на проведение коррекции, или, имея тот же срок эксплуатации, увеличить массу полезной нагрузки, используя тот же ракетоноситель для выведения КА на орбиту (т.к. увеличение полезной нагрузки КА компенсируется уменьшением количества рабочего тела, необходимого для удержания КА на орбите).
Источники информации.
1. "Способ управления космическим аппаратом, снабженным реактивными двигателями с направленными под углом к осям связанного базиса и смещенными относительно центра масс аппарата линиями действия тяг, система для реализации способа, блок реактивных двигателей системы." Патент RU 2124461 С1.
2. "Способ управления космическим аппаратом с помощью реактивных исполнительных органов и система для его реализации." Патент RU 2112716 С1.
3. А.В.Соколов и Ю.П.Улыбышев "Многовитковые маневры с малой тягой в окрестности геостационарной орбиты". Известия Академии наук. Теория и системы управления. 1999 г., 2, стр. 95-100.
4. Г. М. Чернявский, В.А.Бартенев, В.А.Малышев "Управление орбитой стационарного спутника". Машиностроение, 1984 г.
Изобретение относится к области объединенного управления ориентацией и движением центра масс космических аппаратов (КА). В предлагаемом способе по вектору кинетического момента в системе силовых гироскопов и вектору угловой скорости КА определяют текущий суммарный кинетический момент КА  Выбирают электроракетные реактивные двигатели с проекциями тяг на заданное направление коррекции орбиты и группируют их во всевозможных комбинациях. Для каждой группы прогнозируют изменения вектора
Выбирают электроракетные реактивные двигатели с проекциями тяг на заданное направление коррекции орбиты и группируют их во всевозможных комбинациях. Для каждой группы прогнозируют изменения вектора  на определенном интервале коррекции. При этом, кроме двигателей, учитывают влияние на КА внешних магнитных, гравитационных и солнечно-светового полей. Определяют момент и интервал времени выхода данного вектора
на определенном интервале коррекции. При этом, кроме двигателей, учитывают влияние на КА внешних магнитных, гравитационных и солнечно-светового полей. Определяют момент и интервал времени выхода данного вектора  на границу области его допустимых значений. За этот интервал определяют величины импульсов коррекции от каждой группы двигателей и включают в действие группу с максимальным импульсом. В процессе коррекции орбиты отслеживают разность прогнозируемых и текущих значений вектора G(t) для данной группы. Продолжают коррекцию, если модуль этой разности менее допустимой величины. В противном случае прекращают коррекцию орбиты и считают текущий момент времени начальным для повторного выбора вышеуказанной группы двигателей. Изобретение обеспечивает повышение точности управления, минимизацию расхода рабочего тела и снижение влияния процесса разгрузки гироскопов на орбиту КА. 3 ил.
на границу области его допустимых значений. За этот интервал определяют величины импульсов коррекции от каждой группы двигателей и включают в действие группу с максимальным импульсом. В процессе коррекции орбиты отслеживают разность прогнозируемых и текущих значений вектора G(t) для данной группы. Продолжают коррекцию, если модуль этой разности менее допустимой величины. В противном случае прекращают коррекцию орбиты и считают текущий момент времени начальным для повторного выбора вышеуказанной группы двигателей. Изобретение обеспечивает повышение точности управления, минимизацию расхода рабочего тела и снижение влияния процесса разгрузки гироскопов на орбиту КА. 3 ил.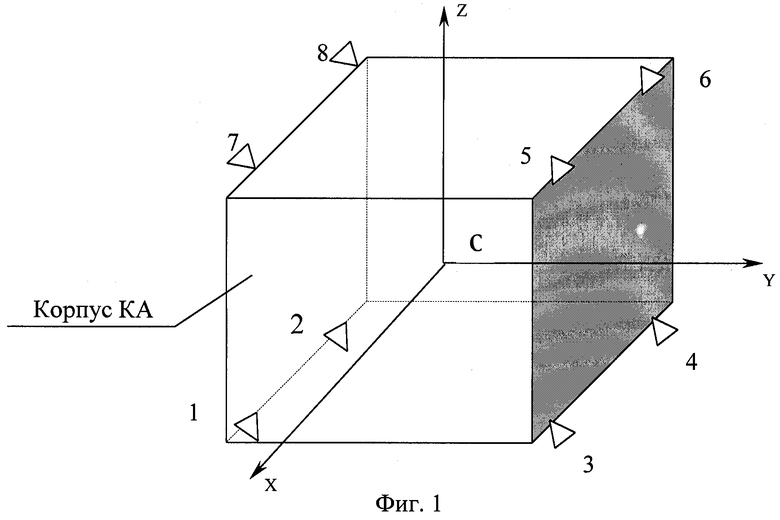
Способ управления космическим аппаратом с помощью силовых гироскопов и реактивных двигателей, расположенных под углом к осям связанного базиса, включающий определение требуемого значения скорости коррекции орбиты космического аппарата, определение интервала времени (t0, tk) проведения коррекции, поддержание заданной ориентации космического аппарата с помощью силовых гироскопов в процессе коррекции орбиты реактивными двигателями, измерение при этом значений вектора кинетического момента в системе силовых гироскопов и вектора угловой скорости космического аппарата, определение по измеренным значениям вектора кинетического момента в системе силовых гироскопов, вектора угловой скорости космического аппарата и с учетом известных значений моментов инерции космического аппарата значений суммарного вектора кинетического момента космического аппарата  отличающийся тем, что начальное значение
отличающийся тем, что начальное значение  суммарного вектора кинетического момента космического аппарата определяют по упомянутым значениям вектора кинетического момента в системе силовых гироскопов и вектора угловой скорости космического аппарата, измеренным в момент времени t0, с учетом известных значений моментов инерции космического аппарата, выбирают, из числа установленных на борту космического аппарата, i-е реактивные двигатели, векторы тяг которых обеспечивают заданное направление коррекции орбиты, определяют n-е группы (n= 1, 2, . . . , k, где k - максимальное число групп), включающие все возможные комбинации из i-х реактивных двигателей, прогнозируют изменения суммарного вектора кинетического момента
суммарного вектора кинетического момента космического аппарата определяют по упомянутым значениям вектора кинетического момента в системе силовых гироскопов и вектора угловой скорости космического аппарата, измеренным в момент времени t0, с учетом известных значений моментов инерции космического аппарата, выбирают, из числа установленных на борту космического аппарата, i-е реактивные двигатели, векторы тяг которых обеспечивают заданное направление коррекции орбиты, определяют n-е группы (n= 1, 2, . . . , k, где k - максимальное число групп), включающие все возможные комбинации из i-х реактивных двигателей, прогнозируют изменения суммарного вектора кинетического момента  на определенном интервале времени коррекции орбиты для каждой из n-х групп, при этом учитывают влияние на космический аппарат внешних возмущающих моментов и моментов сил от каждого i-го реактивного двигателя, входящего в n-ю группу, прогнозируют суммарный вектор кинетического момента космического аппарата при работе n-й группы реактивных двигателей
на определенном интервале времени коррекции орбиты для каждой из n-х групп, при этом учитывают влияние на космический аппарат внешних возмущающих моментов и моментов сил от каждого i-го реактивного двигателя, входящего в n-ю группу, прогнозируют суммарный вектор кинетического момента космического аппарата при работе n-й группы реактивных двигателей  определяют, по выполнению условия
определяют, по выполнению условия  момент времени tsn выхода суммарного вектора кинетического момента для каждой из n-х групп на границу области S его допустимых для проведения коррекции орбиты значений, определяют для каждой из n-х групп интервал времени Δtn = tsn-t0 выхода суммарного вектора кинетического момента на границу указанной области S, определяют величины импульсов коррекции
момент времени tsn выхода суммарного вектора кинетического момента для каждой из n-х групп на границу области S его допустимых для проведения коррекции орбиты значений, определяют для каждой из n-х групп интервал времени Δtn = tsn-t0 выхода суммарного вектора кинетического момента на границу указанной области S, определяют величины импульсов коррекции  для каждой из n-х групп двигателей, где
для каждой из n-х групп двигателей, где  - суммарное значение проекций тяг i-х реактивных двигателей n-й группы на направление коррекции орбиты, выбирают для коррекции орбиты из условия максимизации импульса
- суммарное значение проекций тяг i-х реактивных двигателей n-й группы на направление коррекции орбиты, выбирают для коррекции орбиты из условия максимизации импульса  n'-ю группу реактивных двигателей, которую включают для коррекции орбиты в указанный момент времени t0, в процессе коррекции орбиты сравнивают значения суммарного вектора
n'-ю группу реактивных двигателей, которую включают для коррекции орбиты в указанный момент времени t0, в процессе коррекции орбиты сравнивают значения суммарного вектора  для указанной n'-й группы реактивных двигателей с текущими значениями вектора
для указанной n'-й группы реактивных двигателей с текущими значениями вектора  и продолжают коррекцию орбиты в случае выполнения условия
и продолжают коррекцию орбиты в случае выполнения условия  где ΔG - суммарное значение вектора кинетического момента, определяющее допустимое расхождение его прогнозируемого значения с измеренным, причем в противном случае прекращают коррекцию орбиты, присваивают текущему значению времени t значение t0 и производят повторный выбор n'-й группы реактивных двигателей для коррекции орбиты указанным выше образом.
где ΔG - суммарное значение вектора кинетического момента, определяющее допустимое расхождение его прогнозируемого значения с измеренным, причем в противном случае прекращают коррекцию орбиты, присваивают текущему значению времени t значение t0 и производят повторный выбор n'-й группы реактивных двигателей для коррекции орбиты указанным выше образом.
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ С ПОМОЩЬЮ РЕАКТИВНЫХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2112716C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ, СНАБЖЕННЫМ РЕАКТИВНЫМИ ДВИГАТЕЛЯМИ С НАПРАВЛЕННЫМИ ПОД УГЛОМ К ОСЯМ СВЯЗАННОГО БАЗИСА И СМЕЩЕННЫМИ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС АППАРАТА ЛИНИЯМИ ДЕЙСТВИЯ ТЯГ, СИСТЕМА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА, БЛОК РЕАКТИВНЫХ ДВИГАТЕЛЕЙ СИСТЕМЫ | 1997 |
|
RU2124461C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ С ПОМОЩЬЮ РЕАКТИВНЫХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ ПРИ ПОДДЕРЖАНИИ ЗАДАННОЙ ОРИЕНТАЦИИ | 1996 |
|
RU2112713C1 |
| US 5130931 А, 14.07.1992. | |||

