Изобретение относится к передающим системам и может быть использовано для передачи телемеханической информации от нескольких географически удаленных контрольных пунктов по общему каналу связи, в частности, по выделенным каналам тональной частоты и по линиям электропередачи (с получением высокого времени реакции на аварийные события и эффективным использованием пропускной способности канала связи).
Известен способ передачи информации CSMA-CD - Carrier Sense Multiple Access with Collision Detection - протокол множественного доступа с проверкой несущей и обнаружением конфликтов, широко используемый в локальных сетях и детально описанный в стандарте IEEE Std 802.7-1989 (R1997). Этот способ представляет из себя одну из разновидностей метода временного разделения доступа к физическому каналу связи - методе случайного доступа. Метод случайного доступа основан на том, что любая станция в сети пытается получить доступ к каналу передачи в необходимый для нее момент времени. При этом определен ряд правил, позволяющих избежать одновременной передачи данных несколькими рабочими станциями. Этот способ обеспечивает высокую скорость передачи в широкополосном канале и является основой современных скоростных сетей Fast Ethernet (802.3u) Gigabit Ethernet (802.3z). К недостаткам этого способа относятся высокая недетерминированность получения сообщений, являющаяся следствием вероятностного характера метода доступа к каналу, и неэффективность использования канала связи, связанная с необходимостью обработки коллизий. Данные недостатки делают неэффективным применение данного метода на каналах большой географической протяженности, таких как каналы ТЧ и линии электропередачи, поскольку подобные каналы имеют лимитированную полосу пропускания и эффективность использования канала является критичным параметром. Кроме того, к репитерам, входящим в состав каналообразующего оборудования, необходимо предъявить требования обеспечения распространения сигнала от каждой станции в обоих направлениях.
Известен также способ передачи информации, основанный на жесткой приоретизации сообщений и разрешении конфликтов между станциями по этим приоритетам непосредственно в процессе передачи заголовка кадра, за счет введения доминантного и рецессивного состояния линии передачи, реализованный компанией ROBERT BOSH GmbH в протоколе CAN [http://www.infineon.com/cmc_upload/migrated_files/document_files/Application_Notes/can2spec.pdf].
Этот способ обеспечивает детерминированность доставки сообщений и приоритетную доставку важных сообщений. К недостаткам этого способа относится необходимость обеспечения того, чтобы время распространения кадра до всех станций в канале имело задержку не более примерно половины времени передачи одного бита информации, что сильно усложняет применение данного способа в канале связи, имеющего в своем составе репитеры, так как накладывает на них жесткие требования - распространение сигнала от каждой станции в обоих направлениях со временем задержки на репитере, не превышающим десятых долей длительности передачи бита.
Известен способ передачи телемеханической информации от географически удаленных объектов по общему физическому каналу, согласно которому канал должен работать в несимметричном режиме, чтобы исключить возможность более чем одному контрольному пункту (КП) пытаться передавать по каналу одновременно. Последовательность, с которой различным КП разрешен доступ к передаче по каналу, определяется процедурой прикладного уровня на пункте управления (ПУ), описанной в п.6.2. "Сбор данных при помощи опроса" ГОСТ Р МЭК 870-5-5. Подробное описание функционирования подобной системы описано в обобщающем стандарте ГОСТ Р МЭК 870-5-101-2001. При этом описание физического уровня ограничивается описанием подмножества используемых цепей обмена по рекомендациям МСЭ-Т V.24/V.28. и стандартных скоростей передачи информации.
К достоинствам способа можно отнести его нетребовательность к каналообразующему оборудованию. Способ хорошо работает на практически любых каналах как с двух-, так и с четырехпроводным окончанием. Необходимо только обеспечить доставку сигналов в направлении от ПУ к КП и от КП до ПУ. Взаимная связь непосредственно между КП не требуется. Эффективность использования канала связи выше чем в первом способе. Этот способ обеспечивает гарантированную доставку сообщения от каждого КП за установленное время.
Недостатком данного способа является все же недостаточная эффективность использования канала связи и, как следствие, большая дисперсия времени доставки аварийного сообщения от КП вследствие большого общего времени прохода по циклу опроса. Это обусловлено тем, что используется либо низкая скорость передачи в канале при использовании частотной модуляции - не более 1200 бит/с, либо при использовании скоростных модемов приходится постоянно устанавливать соединение с каждым из КП, что приводит, как правило, лишь к увеличению общего времени цикла поллинга за счет большого времени, тратящегося на установление соединения.
Наиболее близким к предложенному способу является способ разделения частотной полосы выделенного канала связи на подканалы по одному для каждого КП методом частотного разделения каналов с реализацией модуляции-демодуляции сигнала в каждом из подканалов методом частотной манипуляции [Ильин В.А Телеуправление и телеизмерение. Учебное пособие. М., Энергоиздат, 1982]. К достоинствам этого метода следует отнести высокую детерминированность времени доставки сообщения от каждой станции вследствие выделенности каналов, более низкие требования к каналообразующей аппаратуре (неравномерность амплитудно-частотной характеристики используемого канала не вызывает таких искажений передаваемой информации как в предыдущем описываемом способе. В случае использования четырехпроводной линии направление передачи сигнала в каждой паре всегда фиксировано, что упрощает конструкцию репитеров).
К недостаткам этого способа относятся фиксированное число подканалов, что делает систему сильно избыточной при реальном числе контрольных пунктов, намного меньшем, чем число подканалов, фиксированная пропускная способность каждого из подканалов, что делает проблематичным работу на одном физическом канале КП с сильно различающимся объемом сигналов, необходимых для передачи, а также применение метода частотной манипуляции в подканале, не являющегося самым эффективным методом модуляции на современном уровне техники, что также не дает получить более высокую скорость передачи при заданном соотношении сигнал/шум.
Основной задачей, на решение которой направлено предлагаемое изобретение, является уменьшение среднего времени доставки аварийных сообщений от КП и дисперсии этого параметра системы, а также увеличение эффективности использования канала связи (увеличение суммарной скорости передачи информации в канале связи). Основное техническое противоречие, возникающее при попытке уменьшить время доставки аварийного сообщения, заключается в том, что для того, чтобы уменьшить время доставки, необходимо повысить скорость передачи информации, что возможно сделать, применяя более современные методы модуляции сигнала (в соответствии с рекомендациями МСЭ-Т v.32, v.34 и выше, а также описанные в рекомендациях методы для каналов, отличных от каналов ТЧ), но применение этих методов резко повышает требования к качеству используемого канала связи (и, соответственно, ведет к усложнению и удорожанию каналообразующего оборудования и усложнению его обслуживания в эксплуатации), а также требует большого времени на установление соединения с каждой подчиненной станцией, что резко увеличивает время цикла опроса для сбора данных и сводит на нет преимущества применения данных скоростных методов модуляции.
Поставленная задача достигается тем, что в известном способе предварительно устанавливают данные значений коэффициентов фильтров верхних и нижних частот с частотой среза, равномерно распределенной по всей полосе пропускания канала связи, и параметры процесса модуляции/демодуляции сигнала в подканале в соответствии с возможными значениями полосы пропускания подканала, определяют необходимую пропускную способность каждого из подканалов в долевых соотношениях, устанавливают ориентировочную полосу пропускания каждого подканала с учетом ширины полосы пропускания всего канала и доли каждого из подканалов, выбирают фильтры на основании предварительно установленных данных фильтров верхних и нижних частот, наиболее близко подходящие по частоте среза к частоте, определяемой выражениями
Fвi - частота среза для фильтра верхних частот i-го подканала;
Fкн - нижняя частота полосы пропускания канала;
ΔFn - ориентировочная полоса пропускания n-го подканала;

Fнi - частота среза для фильтра нижних частот i-го подканала;
ΔFi - ориентировочная полоса пропускания i-го подканала,
после чего устанавливают параметры модуляции/демодуляции для каждого из подканалов, а передачу данных осуществляют с использованием выбранных параметров фильтров и параметров модуляции/демодуляции сигнала в подканале.
В случае наличия ограничений по вычислительной мощности устройства, реализующего данный способ, целесообразно применение в модуляторе/демодуляторе метода частотной манипуляции. В этом случае частоты нуля и единицы оптимально выбрать по формулам


Для более эффективного использования канала передачи информации целесообразно применение в модуляторе/демодуляторе двух-, четырех- или восьмифазную относительной модуляции.
В случае достаточности вычислительной мощности устройства в качестве метода модуляции/демодуляции сигнала в подканале используют 16- или 32-позиционную квадратурную амплитудную модуляцию с применением треллис-кодирования.
В случае наличия локальных помех в отдельный частях спектра канала передачи информации целесообразно в каждом из подканалов использовать различные методы модуляции/демодуляции сигнала.
В случае необходимости удаленного изменения конфигурации в процессе работы системы формируют дополнительный подканал для передачи команд управления и параметров фильтрации и модуляции/демодуляции сигнала.
Новым является то, что определение полосы частот каждого из подканалов производят индивидуально, исходя из необходимой для каждого из подканалов полосы пропускания (объема необходимой для передачи информации от конкретного КП) на этапе конфигурирования системы передачи. В каждом из подканалов возможно применение любого современного помехоустойчивого метода модуляции/демодуляции сигнала, так как установление соединения в данном случае осуществляется только в период инициализации либо переконфигурации системы и время установления соединения становится некритичным параметром. При этом суммарная пропускная способность канала связи может приблизиться к максимально возможной, определяемой теоремой Шеннона:
Вмакс=Δf×log2(1+Рс/Рпом),
где Вмакс - максимально возможная скорость передачи, бит/с;
Δf - рабочая полоса частот, Гц;
Pc - мощность сигнала;
Рпом - мощность помехи.
Выбор типа используемого метода модуляции/демодуляции определяется только вычислительной мощностью конкретного устройства, реализующего данный способ, так как более совершенные способы модуляции требуют больших вычислительных ресурсов.
В случае, когда объем необходимой для передачи информации от конкретного КП в течение времени может сильно изменяться (перевод КП в режим выдачи диагностических трендов, удаленная загрузка программ и т.п.), проблему необходимости изменения пропускной способности подканала решают путем динамического изменения параметров конфигурации системы передачи информации. Для этой цели в перечень выделяемых каналов вводят один дополнительный канал, не подлежащий переконфигурированию, через который ПУ посылает команды на КП, оповещая их об изменении конфигурации системы передачи.
На фиг.1 приведен вариант функциональной схемы устройства, реализующего предлагаемые варианты способа передачи телемеханической информации.
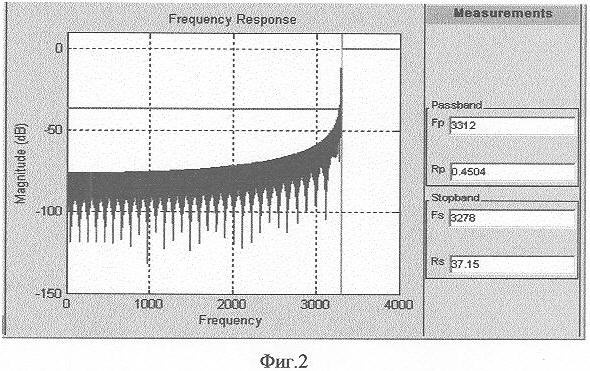
На фиг.2 приведена частотная характеристика и параметры фильтра верхних частот.
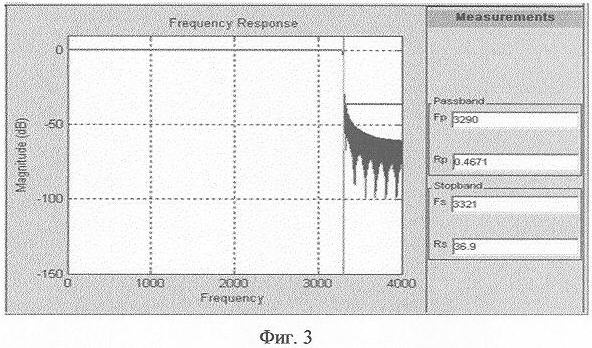
На фиг.3 приведена частотная характеристика и параметры фильтра верхних частот.
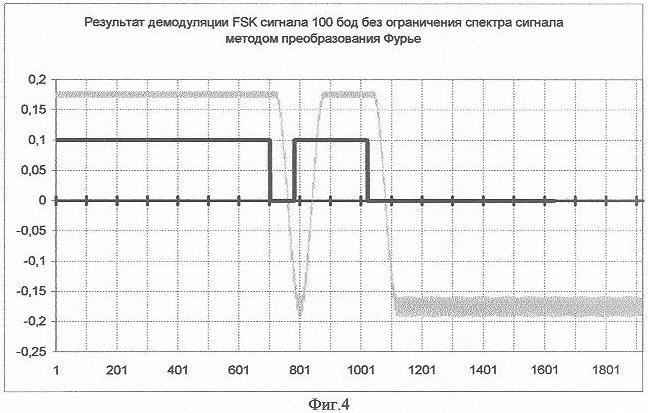
На фиг.4 показан результат демодуляции FSK-сигнала методом преобразования Фурье без ограничения спектра частот.
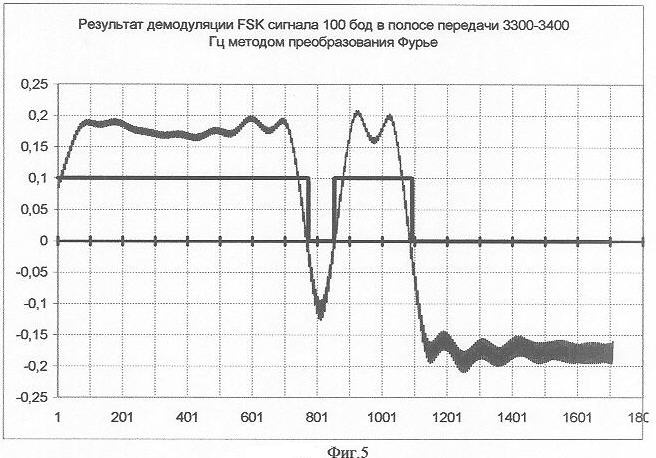
На фиг.5 показан результат демодуляции FSK-сигнала методом преобразования Фурье в полосе передачи 3300-3400 Гц.
Способ передачи телемеханической информации заключается в следующем.
На этапе создания устройства создают таблицы коэффициентов фильтров верхних и нижних частот для частотного разделения каналов с частотами среза, равномерно распределенными по полосе пропускания канала связи, причем количество этих частот должно быть как минимум не меньше максимального предполагаемого количества подканалов. Для минимизации межсимвольной интерференции время групповой задержки сигнала внутри полосы пропускания должно быть постоянно. Поэтому для генерации коэффициентов фильтров должны применяться алгоритмы, обеспечивающие данное условие, например Kaiser window FIR-фильтр. После этого создаются таблицы параметров для реализации всех возможных вариантов процесса модуляции/демодуляции (скорость передачи, частоты нуля и единицы для частотного метода модуляции или несущая частота для фазовых методов модуляции и т.д.).
На этапе конфигурирования системы передачи для работы на конкретном объекте определяют рабочую полосу частот канала связи, необходимое количество подканалов и необходимую пропускную способность каждого из подканалов в долевых соотношениях, причем сумма всех долевых соотношений должна равняться единице. Затем определяют ориентировочные частоты среза для фильтров верхних и нижних частот, осуществляющих частотное разделение каналов в соответствии с формулами (1) и (2). По выбранным ориентировочным частотам среза фильтров определяют реальные частоты среза из таблиц фильтров, определенных на этапе создания устройства передачи. По определенным параметрам частот среза фильтров верхних и нижних частот определяют параметры модуляции/демодуляции каждого из подканалов также на основе готовых таблиц, описывающих все возможные варианты. Выбранные варианты загружаются в устройства передачи и используются далее в процессе передачи информации.
Для обеспечения динамического изменения конфигурации системы передачи информации при изменении режимов работы КП может также вводиться один дополнительный канал, через который ПУ посылает команды на КП, оповещая их об изменении конфигурации системы передачи. При этом перед посылкой команды переконфигурирования системы ПУ должно по сути повторить все те действия по выбору параметров системы передачи, которые делались на этапе начального конфигурирования системы, только под новые изменившиеся условия. Параметры же работы самого служебного подканала не подлежат изменению, чтобы всегда оставалась возможность перезагрузить конфигурацию системы, даже в случае загрузки перед этим неработоспособной конфигурации.
Реализация способа передачи телемеханической информации осуществляется с помощью HOST-процессора 1, занимающегося логической обработкой данных и поддержкой протокола передачи данных, соединенного локальной шиной с DSP процессором 2, который осуществляет частотное разделение каналов, модуляцию/демодуляцию сигнала каждого из подканалов и передачу и прием кадров с данными. DSP-процессор, в свою очередь, подключен к оконечному устройству 3, которое содержит в своем составе интерполяционный и децимационный фильтры, цифроаналоговый и аналогово-цифровой преобразователи, а также аналоговую часть, обеспечивающую сопряжение устройства с конкретным типом используемой линии связи. К DSP подключено также постоянное запоминающее устройство 4, обеспечивающее функции хранения программ для реализации конкретных алгоритмов модуляции/демодуляции сигнала, а также таблиц со всеми вариантами фильтров для частотного разделения сигналов, а также таблиц с параметрами реализации конкретных алгоритмов модуляции/демодуляции, зависящих от заданной полосы пропускания подканала.
В качестве HOST-процессора может быть применен любой стандартный микропроцессор, имеющий внешнюю параллельную шину для подключения дополнительных устройств. Выбор HOST-процессора обусловливается в большей степени имеющимся опытом работы компании-разработчика, чем требованиями системы.
Операции частотного разделения каналов и модуляции/демодуляции сигналов осуществляет DSP-процессор. Основной параметр, необходимый для верного выбора DSP процессора, - это его быстродействие, требуемое быстродействие процессора определяют исходя из вычислительных затрат, необходимых для осуществления операций частотного разделения каналов и модуляции/демодуляции сигналов. Для этого необходимо изначально задать следующие параметры: общая полоса пропускания канала связи, максимально возможное число подканалов, шаг в генерируемой таблице частот разделительных фильтров, тип используемой модуляции в подканале.
В качестве примера рассмотрим требования к DSP-процессору для реализации устройства связи системы телемеханики в канале тональной частоты с диапазоном от 400 до 3400 Гц, с шагом сетки частот 100 Гц. Для 30-ти контрольных пунктов (30 подканалов).
Ширина спектра одного подканала получается 100 Гц.
Частоты нуля и единицы в соответствии с формулами (2) и (3) отстоят от края диапазона на 25 Гц.
Поскольку мы работаем в звуковом диапазоне частот, то оптимальной скоростью дискретизации для обработки сигнала выбирают 8 кГц. С помощью стандартных программных пакетов, например Матлаб, генерируют фильтры нижних и верхних частот с учетом того, что подавление соседних каналов должно быть достаточно для успешного процесса декодирования. Оптимальным значением неравномерности в полосе пропускания является 0,5 дБ, и величина подавления в полосе задерживания не менее 30 дБ. Получившиеся фильтры с конечной импульсной характеристикой (Kaiser window FIR) верхних и нижних частот с частотой среза 3300 Гц показаны на Фиг.2 и 3. Порядок фильтров 800. Фильтры на остальные частоты 3200, 3100, 3000 Гц и т.д. до 500 генерируются также. На более низких частотах порядок фильтра может быть уменьшен.
В DSP-процессоре одно звено фильтра просчитывается за 1 операцию умножения с накоплением (MAC). Для частотного разделения каналов нам нужно просчитать 58 фильтров (2 фильтра на каждый подканал минус края диапазона передачи канала). При выбранной частоте дискретизации 8 кГц получаем необходимое быстродействие процессора для частотного разделения каналов 58×800×8000=371,2 ММАС (миллионов операций умножения с накоплением в секунду), уменьшения требуемого быстродействия вдвое можно достичь совмещением фильтра верхних и нижних частот подканала в полосовом фильтре с помощью пересчета коэффициентов либо сохранением в таблице всех возможных значений полосовых фильтров.
Для демодуляции сигнала можно вычислить величины гармоник частот нуля и единицы методом преобразования Фурье с количеством отсчетов, равным длительности передаваемого бита информации, и затем использовать разность этих значений для определения передаваемого бита информации. В нашем случае это 80 отсчетов. Соответственно, требуемая мощность процессора для этой операции 30×2×80×8000=38,4 ММАС. Частотная модуляция сама по себе занимает очень мало ресурсов, но обрезание спектра каждого из подканалов до заданной полосы пропускания требует применения такой же фильтрации, как на приеме, поэтому суммарные требования к быстродействию DSP можно определить как 371,2+38,4+371,2=780,2 ММАС при применении фильтров верхних и нижних частот или 371,2/2+38,4+371,2/2=409,6 ММАС.
Под получившееся быстродействие хорошо подходят DSP серии Blackfin компании Analog Devices, имеющие быстродействие от 600 до 2000 ММАС. На фиг.4 показан демодулированный описанным методом тестовый сигнал, передаваемый частотной манипуляцией с частотами нуля и единицы 3325 и 3375 Гц. По оси Х показаны отсчеты АЦП. В момент, когда Кривая находится выше оси Х, детектируется 1, если ниже, то 0.
На фиг.5 показан тот же тестовый демодулированный сигнал, но прошедший дважды через рассчитанные выше фильтры частотного разделения каналов (для большей наглядности сигнал сдвинут по оси X). Из сравнения фиг.4. и фиг.5 видно, что, несмотря на небольшие искажения формы кривой, длительность декодируемых импульсов нуля и единицы остались неизменными. В результате мы получили 30 каналов по 100 бит/с каждый, то есть суммарную скорость передачи 3000 бит/с, что более чем в 2 раза превышает распространенную в настоящее время в телемеханике скорость передачи 1200 бит/с и более чем в 8 раз суммарную скорость передачи прототипа.
Для оценки быстродействия DSP при реализации восьмифазной относительной модуляции можно воспользоваться рекомендациями фирмы Texas Instruments "DSP Solutions for Telephony and Data/Faximile modems. Application Book. Стр 102. Так реализация протокола V.27 ter (включающая в себя восьмифазную относительную модуляцию) требует 4 MIPS быстродействия процессора, а реализация протокола V.32 (включающая в себя 16-позиционную квадратурную амплитудную модуляцию и 32-позиционную квадратурную амплитудную модуляция с треллис-кодированием) требует не более 15 MIPS на канал.
Выбор исполнения для оконечного устройства также зависит от используемой линии связи. Для каналов тональной частоты хорошо подходят микросхемы аналогового интерфейса к DSP (AICs), например микросхема TLV320AIC11 фирмы Texas Instruments (16-разрядный сигма-дельта АЦП, ЦАП, встроенные децимационный и интерполяционный фильтры).
Таким образом, за счет указанной совокупности отличительных признаков предложенный способ передачи телемеханической информации позволяет достичь уменьшения среднего времени доставки аварийных сообщений от КП и дисперсии этого параметра системы, а также увеличения суммарной скорости передачи информации в канале связи по сравнению с прототипом и системами на основе опроса подчиненных станций.
Изобретение относится к передающим системам и может использоваться для передачи телемеханической информации от нескольких географически удаленных контрольных пунктов по общему каналу связи. Достигаемый технический результат - уменьшение среднего времени доставки аварийных сообщений от контрольных пунктов и дисперсии этого параметра системы, а также увеличение суммарной скорости передачи информации в канале связи. Способ характеризуется тем, что осуществляют частотное разделение всей выделенной для передачи полосы частот на подканалы, определяют необходимую пропускную способность каждого из подканалов в долевых соотношениях, устанавливают ориентировочную полосу пропускания каждого подканала с учетом ширины полосы всего канала и доли каждого из подканалов, выбирают фильтры на основании предварительно установленных данных фильтров верхних и нижних частот, наиболее близко подходящие по частоте среза к частоте, определяемой заданным математическим выражением, после чего устанавливают параметры модуляции/демодуляции для каждого из подканалов, а передачу данных осуществляют с использованием выбранных параметров фильтров и параметров модуляции/демодуляции сигнала в подканале. 5 з.п. ф-лы, 5 ил.
где Fвi - частота среза для фильтра верхних частот i-го подканала;
Fкн - нижняя частота полосы пропускания канала;
ΔFn - ориентировочная полоса пропускания n-го подканала,

где Fнi - частота среза для фильтра нижних частот i-го подканала;
ΔFi - ориентировочная полоса пропускания i-го подканала,
после чего устанавливают параметры модуляции/демодуляции для каждого из подканалов, а передачу данных осуществляют с использованием выбранных параметров фильтров и параметров модуляции/демодуляции сигнала в подканале.


| МИЛЕЙКОВСКИЙ С.Г | |||
| Основы многоканальной связи | |||
| Связь | |||
| - М., 1974, с.84-92 | |||
| УСТРОЙСТВО ПЕРЕДАЧИ И ПРИЕМА МНОГОКАНАЛЬНЫХ СИГНАЛОВ | 1994 |
|
RU2110896C1 |
| Экономайзер | 0 |
|
SU94A1 |
| US 4618999, 21.10.1986. | |||

