Изобретение относится к области радиотехники и предназначено для использования в каналах радиосвязи при передаче сигналов с относительной фазовой манипуляцией (ОФМ). Демодуляция сигналов связи с ОФМ могут быть двух типов: демодуляторы, в которых используется метод сравнения фаз и демодуляторы, в которых используется метод сравнения полярностей. Метод сравнения фаз требует наличия линии задержки на время длительности элементарной посылки, что в случаях аналоговой реализации принципиальной схемы демодулятора достаточно проблематично. Метод сравнения полярностей имеет несколько большую помехоустойчивость по сравнению с методом сравнения фаз. Однако у этого метода имеется существенный недостаток, который заключается в том, что ошибки на выходе демодулятора появляются парами. Это вносит определенные неудобства при использовании в системах связи с ОФМ обычных методов избыточного кодирования, например, кодирования с проверкой на четность. В предложенном варианте демодуляции сигналов с ОФМ на приемном конце радиолинии производится разветвление сигнала и в одной из ветвей сигнал дополнительно манипулируется по фазе с периодом, равным длительности элемента сообщения синхронно с фронтами принимаемого сигнала. В каждой из ветвей включается узкополосный фильтры полосой пропускания в два раза уже фильтра основной селекции, с выхода которых сигналы подаются на амплитудные детекторы. Напряжения на выходах амплитудных детекторов вычитаются друг и результат вычитания подается на триггер, который выносит решение о значении принятого элемента («0» или «1»). Ошибки при таком методе демодуляции сигналов с ОФМ не группируются парами, что позволяет при приеме сигналов с ОФМ использовать обычные методы кодирования, в том числе с проверкой на четность.
Достигаемый технический результат данного изобретения – упрощение схемной и программной реализации демодулятора сигналов с ОФМ, а также ликвидация ситуаций появления ошибок парами на выходе канала связи в демодуляторах сигналов с ОФМ, что позволяет использовать для передачи сообщений избыточное кодирование, в частности, с проверкой на четность.
Изобретение относится к области радиотехники и предназначено для использования в каналах радиосвязи при передаче сигналов с относительной фазовой манипуляцией (ОФМ). В отличие от демодуляторов сигналов с ОФМ, использующих метод сравнения полярностей, в предлагаемом демодуляторе отсутствует факт группирования ошибок парами, что позволяет использовать в каналах связи с ОФМ обычных методов избыточного кодирования, таких как кодирование с проверкой на четность. В отличие от метода сравнения фаз предлагаемый метод не требует наличия линии задержки на время длительности элементарной посылки.
Известны два метода приема сигналов с ОФМ: метод сравнения фаз и метод сравнения полярностей [Н.Т. Петрович. ПЕРЕДАЧА ДИСКРЕТНОЙ ИНФОРМАЦИИ В КАНАЛАХ С ФАЗОВОЙ МАНИПУЛЯЦИЕЙ. 1965 г. Стр. 83-88]. Метод сравнения полярностей обладает несколько более высокой помехоустойчивостью по сравнению с методом сравнения полярностей [Там же: стр. 150, рис. 3.8]. Но при этом у метода сравнения полярностей имеется большой недостаток, который заключается в том. что на выходе такого рода демодулятора ошибки формируются парами [Там же: стр. 96, уравнение (2.65)], что не позволяет использовать обычные методы избыточного кодирования такие, например, как кодирование с проверкой на четность. У метода сравнения полярностей отсутствует принципиальная причина появления ошибок парами, но он для демодуляции требует наличия линии задержки [Там же: стр.86, рис. 2.6]. В предлагаемом методе демодуляции отсутствует принципиальная причина, вызывающая группирование ошибок парами, и сравнение фаз соседних посылок не производится, т. е. линия задержки не требуется.
За прототип предлагаемого изобретения принят демодулятор частотно-модулированных (ЧМ) сигналов с двумя частотно-разнесенными подканалами, по одному из которых передаются символы одного значения, например, «1», а по другому - символы другого значения (в этом случае «0») [Финк Л.М. Теория передачи дискретных сообщений. М., 1970. Стр. 236, рис. 4.4]. Сравнение амплитуд сигналов, накопленных в конце каждой элементарной посылки интеграторами в виде, например, узкополосных резонансных контуров, настроенных на частоты принимаемых поднесущих колебаний и коммутируемых в соответствующие моменты времени, позволяет определить на границах элементарных посылок наибольшую из этих амплитуд и принять соответствующее решение о значении принимаемого элемента: «1» или «0».
В предлагаемом варианте построения ОФМ демодулятора, как и у прототипа имеется два подканала приема – один без преобразования фазы, а второй с манипуляцией по фазе с периодом, равным длительности элемента сообщения синхронно с фронтами принимаемого сигнала. Сравнение амплитуд сигналов, накопленных интеграторами [Ричард Лайонс. Цифровая обработка сигналов. М. Бином, 2006. Стр.524-528 Скользящее ДПФ.] в конце двух очередных элементарных посылок на выходах этих двух подканалов аналогично тому, как это делается в частотном демодуляторе, позволяет определить на границах элементарных посылок наибольшую из этих амплитуд и принять соответствующее решение о том – было, или не было изменение фазы колебания между этими соседними посылками. Если накопленное на интервале двух смежных посылок напряжение на выходе интегратора подканала без дополнительной манипуляции фазы превосходит напряжение на выходе интегратора в подканале с дополнительной манипуляцией фазы, то изменение фазы колебания между соседними посылками не было и демодулятор принимает решение о приеме элементарной посылки «1» (или «0»). Если же накопленное на интервале двух смежных посылок напряжение на выходе интегратора подканала без дополнительной манипуляции фазы оказывается меньше напряжения на выходе интегратора в подканале с дополнительной манипуляцией фазы, то изменение фазы колебания между соседними посылками было и демодулятор принимает решение о приеме элементарной посылки «0» (или, соответственно, «1»).
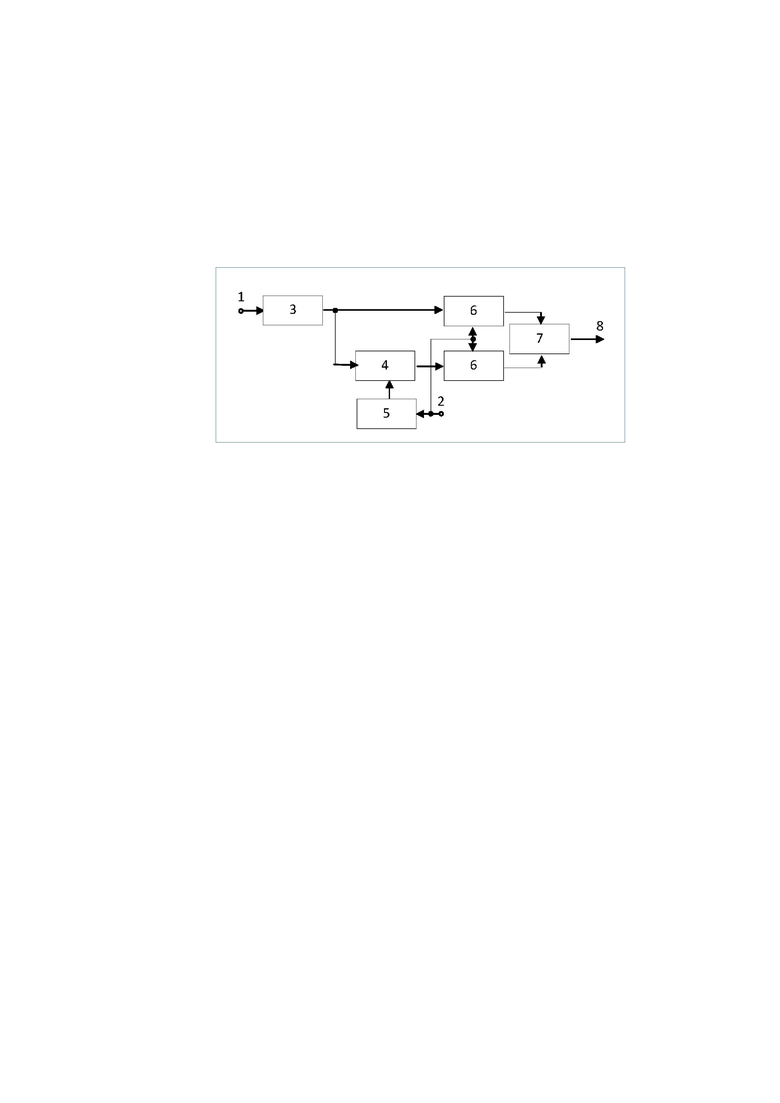
Поясним вышеописанный алгоритм блок-схемой демодулятора сигнала с ОФМ, изображенной на фиг. 1.
На фиг. 1 обозначено:
1 – вход демодулятора;
2 – вход для сигналов тактовой синхронизации;
3 – фильтр основной избирательности (ФОИ);
4 – перемножитель;
5 – генератор последовательности прямоугольных импульсов типа «меандр» с периодом, равным длительности двух элементарных посылок принимаемого сигнала;
6 – интеграторы сигналов на длительности двух очередных соседних элементарных посылок;
7 – устройство сравнения результатов на выходах интеграторов в момент окончания очередного принимаемого элемента и вынесения решения о его значении;
8 – выход демодулятора.
Демодулятор сигналов с ОФМ функционирует следующим образом.
На вход демодулятора (1) подается принимаемый сигнал с относительной фазовой манипуляцией. Спектр принимаемого сигнала фильтруется фильтром основной избирательности (3). Полоса пропускания этого фильтра согласована с полосой частот, которую занимает спектр принимаемого сигнала. После фильтра основной избирательности сигнал обрабатывается параллельно в двух подканалах. Один подканал включает в себя интегратор (6), представляющий собой узкополосный фильтр, в котором накапливается сигнал в течение 2 соседних посылок. Если смены фазы колебания между посылками очередной пары не происходило, то на выходе интегратора будет колебание, амплитуда которого пропорциональна уровню принимаемого сигнала. Если же между посылками очередной пары произошла смена фаз несущего колебания, то на выходе этого интегратора напряжение, вызываемое сигналом будет равно нулю. На интегратор (6), включенный во второй подканал принимаемый сигнал подается после дополнительной манипуляции фазы с помощью перемножителя (4), который изменяет относительные значения начальных фаз в элементарных посылках принимаемого сигнала. Эта операция производится с помощью напряжения, поступающего с выхода генератора последовательности прямоугольных импульсов (5). Эта последовательность прямоугольных импульсов представляет собой двухполярный меандр, у которого период равен длительности двух элементарных импульсов. Фронты меандра совпадают с фронтами элементарных посылок принимаемого сигнала. Это обеспечивается сигналами синхронизации, подаваемыми на генератор прямоугольных импульсов от синхронизатора со входа (2). Эти же сигналы синхронизации управляют работой интеграторов. После перемножителя имеет место фазоманипулированный сигнал, у которого фаза между элементарными посылками изменяется в тех местах, в которых у входного сигнала она не изменялась, а в тех местах, в которых у входного сигнала фаза изменялась, это изменение нивелируется. В связи с этим на выходе интегратора (6) во втором подканале накопление сигнала к окончанию второй посылки будет происходить в том случае, когда у входного сигнала было изменение фазы несущего колебания между посылками, а если изменения фазы несущего колебания между посылками у входного сигнала не было, то на выходе второго интегратора напряжение, вызванное сигналом к окончанию второй посылки будет равно нулю. Таким образом, если соседние посылки имеют одну и ту же фазу, то на выходе интегратора (6) в первом подканале к концу времени интегрирования сигнал накапливается, а на выходе интегратора (6) во втором подканале результат накопления будет равен нулю. Сравнивая результаты накопления на выходе этих интеграторов можно определить момент времени, который соответствует передаче символа «1» (или «0»), когда начальные фазы колебаний соседних посылок одинаковые. Если же несущее колебание соседних посылок имеет фазы. отличающиеся на 180°, то на выходе интегратора (6) в первом подканале к концу времени интегрирования сигнал будет отсутствовать, а на выходе интегратора (6) во втором подканале результат накопления будет пропорционален уровню принимаемого сигнала. Сравнивая результаты накопления на выходе этих интеграторов можно определить момент времени, который соответствует передаче символа «0» (или «1»).
Преимуществом предлагаемого способа демодуляции сигналов с ОФМ по сравнению с аналогами является то, что этот способ, в отличие от способа приема сигналов с ОФМ методом сравнения полярностей, не имеет причин для группирования ошибок в принимаемом сигнале парами, что позволяет использовать общепринятые методы кодирования сообщения, например, с проверкой на четность. Предлагаемый способ не требует использования линий задержек на длительность элементарной посылки, что упрощает принципиальную схему демодулятора в аналоговом исполнении. По сравнению с прототипом – демодулятором частотно-манипулированных сигналов предлагаемый вариант приема сообщений с использованием ОФМ сигналов имеет значительный энергетический выигрыш.
Вероятность ошибки ЧМ демодулятора в условиях воздействия аддитивного гауссовского шума рассчитывается по формуле [Финк Л.М. Теория передачи дискретных сообщений. М., 1970. Стр. 268-281]:
а вероятность ошибки ОФМ демодулятора в условиях воздействия аддитивного гауссовского шума рассчитывается по формуле [Там же: стр. 296-303]:
Здесь h2 – отношение энергии элемента сообщения и спектральной плотности мощности шума (отношение мощностей сигнал/шум на выходе фильтра основной избирательности).
Из вышеприведенных формул следует, что энергетический выигрыш ОФМ по сравнению с ЧМ составляет 3 дБ. В предлагаемом варианте демодулятора сигнала с ОФМ этот выигрыш объясняется тем, что накопление сигнала в интеграторах производится на интервале времени равном длительности двух элементарных посылок, а не одной, как в демодуляторе сигналов с ЧМ.
Изобретение относится к технике связи и может использоваться в системах связи, использующих сигналы с относительной фазовой манипуляцией (ОФМ). Технический результат состоит в повышении помехоустойчивости при передачи сигналов с ОФМ. Для этого в предложенном способе принимаемый сигнал фильтруется фильтром основной избирательности, после чего принимаемый сигнал обрабатывается в двух каналах, при этом накопление элементарных посылок производится посредством интеграторов, на интегратор второго канала приема подается принимаемый сигнал с измененными относительными значениями начальных фаз в элементарных посылках, получаемыми посредством перемножения принимаемого сигнала с прямоугольными импульсами с периодом следования, равным длительности двух элементарных импульсов принимаемого сигнала, и обеспечивается синхронизация с интеграторами обоих каналов приема, при этом решение о значении очередного принимаемого элемента сообщения выносится в результате сравнения уровней сигналов на выходах двух каналов. 1 ил.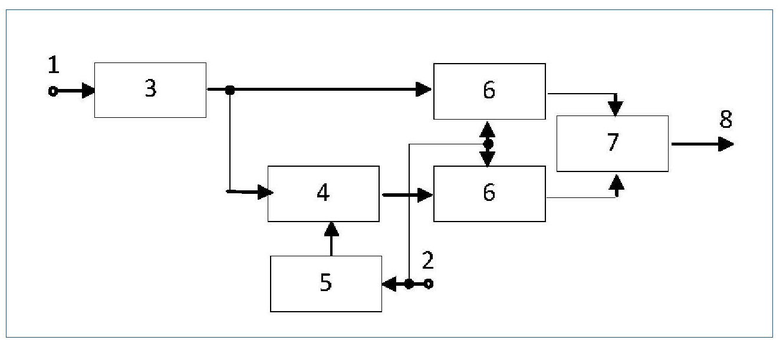
Способ демодуляции сигналов с относительной фазовой манипуляцией, заключающийся в фильтрации принимаемого сигнала, накоплении элементарных посылок принимаемого сигнала по двум каналам приема и сравнении элементарных посылок сигналов, накопленных на выходе каналов приема для принятия решения о значении очередного элемента принимаемого сигнала, отличающийся тем, что принимаемый сигнал фильтруется фильтром основной избирательности, полоса пропускания которого согласована с полосой частот, которую занимает спектр принимаемого сигнала, после чего принимаемый сигнал обрабатывается в двух каналах, при этом накопление элементарных посылок производится посредством интеграторов, выполненных в виде узкого фильтра, который производит синхронное накопление сигнала на интервале двух очередных соседних элементарных посылок, при этом при накоплении элементарных посылок на интегратор второго канала приема подается принимаемый сигнал с измененными относительными значениями начальных фаз в элементарных посылках, получаемыми посредством перемножения принимаемого сигнала с прямоугольными импульсами с периодом следования, равным длительности двух элементарных импульсов принимаемого сигнала, и обеспечения синхронизации с интеграторами обоих каналов приема, при этом решение о значении очередного принимаемого элемента сообщения выносится в результате сравнения уровней сигналов на выходах двух каналов.
| Автокорреляционный демодулятор псевдослучайных сигналов с относительной фазовой модуляцией второго порядка | 2017 |
|
RU2660594C1 |
| НЕКОГЕРЕНТНЫЙ ЦИФРОВОЙ ДЕМОДУЛЯТОР "В ЦЕЛОМ" КОДИРОВАННЫХ СИГНАЛОВ С ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2014 |
|
RU2556429C1 |
| СПОСОБ ДЕМОДУЛЯЦИИ СИГНАЛА МНОГОПОЗИЦИОННОЙ ЧАСТОТНОЙ МАНИПУЛЯЦИИ С ЭКВИДИСТАНТНЫМ РАЗНЕСЕНИЕМ ПО ЧАСТОТЕ, ДЕМОДУЛЯТОР ТАКОГО СИГНАЛА И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ | 2005 |
|
RU2290749C1 |
| Конвейерная кокильная машина | 1973 |
|
SU503632A1 |
| US 4583048 A, 15.04.1986 | |||
| Экономайзер | 0 |
|
SU94A1 |

