Изобретение относится к области гироскопического приборостроения и может быть использовано преимущественно для обеспечения навигации морских, воздушных и наземных движущихся объектов, а также для непосредственной или косвенной стабилизации различных средств в горизонте, например, гравиметрических чувствительных элементов.
Известен способ выработки навигационных параметров и вертикали места [1] . Этот способ отличается сложностью реализации.
Наиболее близким является способ выработки навигационных параметров и вертикали места [2], заключающийся в измерении и формировании сигнала, пропорционального проекции соответствующей составляющей кажущегося ускорения, измеренного при помощи каждого акселерометра, ось чувствительности которого ориентирована по оси приборного трехгранника, связанного с гироплатформой, формирование сигналов гироскопов, отработка сформированного сигнала при помощи гироскопа, удержание гироплатформы в плоскости горизонта или вычисление положения моделируемого трехгранника Дарбу относительно приборного трехгранника для бесплатформенной инерциальной системы по сигналам акселерометров и гироскопов, определение навигационных параметров. Недостатком этого способа является ограниченные возможности обработки информации в фильтре. Предлагаемый способ позволяет расширить возможности обработки навигационной информации в фильтре путем выработки дополнительной навигационной информации.
Указанный технический результат достигается тем, что измеряют сигнал пропорциональный проекции соответствующей составляющей кажущегося ускорения, измеренного при помощи каждого акселерометра, ось чувствительности которого ориентированна по оси приборного трехгранника, измеряют сигнал, пропорциональный проекции абсолютной угловой скорости приборного трехгранника по сигналам гироскопов, вырабатывают на их базе навигационные параметры и вертикаль листа, дополнительно формируют сигнал, пропорциональный разности произведений разноименных проекций абсолютной угловой скорости и ускорения вершины приборного трехгранника Дарбу на его оси, определяют путевую скорость объекта, а также формируют сигнал, пропорциональный сумме произведений одноименных проекций абсолютной угловой скорости и ускорения вершины приборного трехгранника Дарбу на его оси, определяют широту места или ширину места и курс объекта, а выработанные таким образом навигационные параметры обрабатывают в фильтре инерциальной системы.
Указанный способ применим к любому типу инерциальных систем.
Проиллюстрируем предлагаемый способ на примере полуаналитической инерциальной системы.
На чертеже представлена функциональная схема полуаналитической инерциальной системы.
Инерциальная система содержит гиростабилизированную платформу 1, на которой расположены гироскопические 4, 5 и акселерометрические 6, 7 чувствительные элементы. С гиростабилизированной платформой связана система координат XV - приборный трехгранник. Оси чувствительности акселерометров направлены по осям OX и OY. Оси чувствительности гироскопических чувствительных элементов направлены по осям OX; OY; OZ. Выходы акселерометров и входы гироскопических чувствительных элементов связаны с блоком управления гироплатформой и выработки навигационных параметров (фильт 2). Выход гироскопов связаны с двигателями стабилизации 8, 9, 10. С выхода датчика азимутального угла (13) в блок выработки дополнительной навигационной информации (3) поступает сигнал, пропорциональный азимутальному углу C.
Инерциальная система функционирует следующим образом: по сигналам гороскопов посредством следящих двигателей обеспечивается стабилизация платформы. Цепь коррекции по сигналам ΩxΩyΩz совмещает приборный трехгранник XYZ с приборным трехгранником Дарбу.
В блоке 2 инерциальной системы вырабатываются навигационные параметры ϕuc,Kuc,λuc,Vuc. .
Рассмотрим предлагаемый способ на примере произвольно ориентированной в азимуте полуаналитической инерциальной системы. Сигналы управления гироплатформой в этом случае запишутся:
где
ax ay - сигналы акселерометров, оси чувствительности которых ориентированы по осям приборного трехгранника, связанного с гироплатформой;
ΩxΩy - сигналы управления гироплаформой, пропорциональные горизонтальной составляющей абсолютной угловой скорости приборного трехгранника, связанного с гироплатформой; Ωz - вертикальная составляющая абсолютной угловой скорости приборного трехгранника, связанного с гироплатформой;
R - радиус Земли;
S - оператор Лапласа.
Тогда выражения для выработки навигационных параметров инерциальной системы будут:
где
ϕuc - широта места;
VEис - восточная составляющая путевой скорости;
αuc = угол между приборной осью OY и меридианом;
C - известный, замеряемый угол между приборной осью OY и продольной осью объекта;
Vис - путевая скорость;
ΩN - северная составляющая абсолютной угловой скорости приборного трехгранника.
В блоке 3 дополнительно вырабатываются навигационные параметры, исходной информацией для которых является совокупность сигналов акселерометров ax•ay гироскопов ΩxΩyΩz и азимутального угла C между приборным трехгранником Дарбу и корабельным трехгранником Дарбу.
Модуль вектора, являющегося векторным произведением горизонтальной составляющей абсолютной угловой скорости приборного трехгранника и ускорения вершины приборного трехгранника, при движении по земной сфере с определенными допущениями будет иметь следующий вид:
а скалярное произведение этих векторов будет:
Другой вид этого скалярного произведения будет:
где
αк - угол между осью OY приборного трехгранника и компасным меридианом.
Компасный курс Kк равен:
Kк= C-αк
Из уравнения (1) находим Vпр
Из уравнения (2) находим ϕпр.
Из уравнения (3) находим компасный курс
где
Навигационные параметры ϕпр. , Vпр. и Kпр. наряду с навигационной информацией, выработанной инерциальной системой, обрабатывают в фильтре.
Источники информации:
1. Ишлинский А.Ю. ПММ т. XXI вып. 6, 1957.
2. Кошляков В.И. Задачи динамики твердого тела и прикладной теории гироскопов. Наука, 1985, с. 236 - 238.
В способе выработки навигационных параметров и вертикали ласта формируют сигнал разности произведений разноименных проекций сигналов акселерометров и проекций сигналов управления гироплатформой на приборные оси, по которому определяют путевую скорость объекта, а также формируют сигнал суммы произведений одноименных проекций сигналов акселерометров и проекций сигналов управления гироплатформой на приборные оси, по которому определяют широту места и курс объекта, а выработанные таким образом навигационные параметры обрабатывают в фильтре инерциальной системы. 1 ил.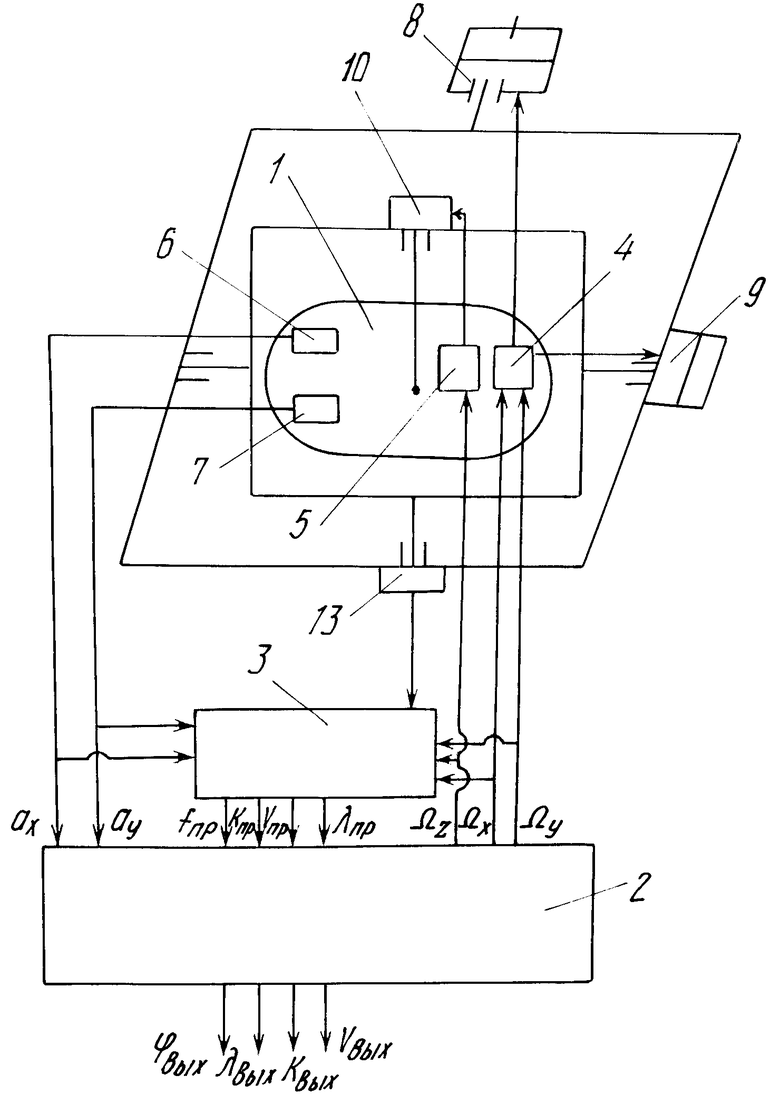
Способ выработки навигационных параметров и вертикали места, заключающийся в измерении и формировании сигнала, пропорционального проекции соответствующей составляющей кажущегося ускорения, измеренного при помощи каждого акселерометра, ось чувствительности которого ориентирована по оси приборного трехгранника, в измерении и формировании сигналов, пропорциональных проекции абсолютной угловой скорости приборного трехгранника по сигналам гироскопов, в выработке на базе этих измерений навигационных параметров и вертикали места, отличающийся тем, что дополнительно формируют сигнал, пропорциональный разности произведений разноименных проекций абсолютной угловой скорости и ускорения вершины приборного трехгранника Дарбу на его оси, по которому определяют путевую скорость объекта, а также формируют сигнал, пропорциональный сумме произведений одноименных проекций абсолютной угловой скорости и ускорения вершины приборного трехгранника Дарбу на его оси, на основании которого определяют широту места или широту места и курс объекта, а выработанные таким образом навигационные параметры обрабатывают в фильтре инерциальной системы.
| Кошляков В.И | |||
| Задачи динамики твердого тела и прикладной теории гироскопов | |||
| - Наука, М., 1985, с.236 - 238. |
