Изобретение относится к гироскопическому приборостроению и может быть использовано для обеспечения навигации морских, воздушных и наземных объектов.
Известен способ выработки навигационных параметров и вертикали места.
Этот способ включает измерение составляющих кажущегося ускорения при помощи акселерометров, оси чувствительности которых связаны с гироплатформой, формирование сигналов управления гироплатформой, отработку сформированных сигналов при помощи гироскопа или датчиков абсолютной угловой скорости [1] или включающий измерение сигналов гироскопов или датчиков абсолютной угловой скорости, оси чувствительности которых направлены по осям приборного трехгранника, аналитическое решение задачи ориентации путем моделирования работы инерциальной системы [2], выработку навигационных параметров и вертикали места.
Недостатком известного способа является сложность управления гироплатформой или моделью гироплатформы.
Целью изобретения является упрощение сигналов управления гироплатформы или моделью гироплатформы и повышение точности выходных параметров.
Цель достигается тем, что при формировании сигналов управления гироплатформой или моделей гироплатформы вместе с сигналами, пропорциональными составляющим кажущегося ускорения, выработанными акселерометром, используют сигналы, содержащие информацию от внешних источников. Управляющие сигналы гироплатформы или модели гироплатформы при аналитическом решении задач ориентации формируют таким образом, чтобы обеспечить связь между скоростной девиацией α и горизонтальной составляющей абсолютной угловой скорости объекта 

где
 - горизонтальная составляющая абсолютной угловой скорости объекта;
- горизонтальная составляющая абсолютной угловой скорости объекта;
ω0 - частота Шулера;
n - параметр системы больше единицы.
Проиллюстрируем предложенный способ на следующем примере
На чертеже 1 представлена структурная схема системы, где приняты следующие обозначения:
1 - гироплатформа в карданном подвесе, наружная ось которого перпендикулярна плоскости основания;
2 - блок управления гироплатформой и выработки навигационных параметров;
3 - блок управления двигателями;
4 - трехстепенной гироскоп;
5, 6 - датчики моментов гироскопа;
7, 8 - датчики углов гироскопа;
9, 10, 11 - акселерометры;
12, 13, 14 - двигатели;
15 - датчик курса объекта;
16 - стабилизированная в плоскости горизонта платформа, например, инерциальной системы с интегральной коррекцией (ИС);
17, 18 - датчики углов карданного подвеса.
Система содержит гироплатформу 1; блок управления гироплатформой и выработки навигационных параметров 2, на гироплатформе 1 расположен трехстепенной гироскоп 4 с датчиками моментов 5, 6 и датчиками углов 7, 8, акселерометры 9, 10, 11, оси чувствительности которых ортогональны, выходы акселерометров 9, 10, 11 соединены с блоком управления гироплатформой и выработки выходных параметров 2, выходы которого соединены с датчиками момента гироскопа 5, 6, входы блоков управления двигателями стабилизации 3 соединены с выходами датчиков углов 7, 8 гироскопа 4, выходы блока управления двигателями стабилизации 3 соединены с соответствующими двигателями стабилизации.
Гироскопическая навигационная система функционирует следующим образом.
Гироплатформа 1 с помощью двигателей стабилизации по сигналам рассогласования датчиков углов гироскопа 7, 8 все время удерживается в одной плоскости с кожухом гироскопа 4. Кожух гироскопа 4 вместе с гироплатформой 1 приводится в положение, наклоненное по отношению к плоскости горизонта на заданный угол скоростной девиации, и удерживается в этом положении с помощью моментов, накладываемых через датчики момента гироскопа 5, 6 по сигналам, специально вырабатываемым в блоке управления гироплатформой 1, двигатель 12 может работать и как следящий двигатель по сигналу датчика угла 17 или отрабатывая сигнал компасного курса, выработанного ИС. За исходную систему координат примем сопровождающий трехгранник Дарбу Е0N0ζ0. Ось ON0 справлена по компасному меридиану на север. Ось Oζ0 - по вертикали вверх. Тогда проекции абсолютной угловой скорости трехгранника Е0N0ζ0 на его оси суть O; ; r. Проекции ускорения будут - ; -rV; g, где g - ускорение силы тяжести.
; -rV; g, где g - ускорение силы тяжести.
С гироплатформой свяжем правую систему координат Е1N1ζ1
Систему координат Е1N1ζ1 получим из системы координат Е0N0ζ0 последовательными поворотами:
1. вокруг оси ОЕ0 на угол α соответственно,
2. вокруг оси ON1 на угол β соответственно.
Проекции абсолютной угловой скорости трехгранника Е1N1ζ1 на его оси
где Δp; Δq - дрейфы гироскопов.
Проекции кажущегося ускорения вершины трехгранника на его оси будут
где  - погрешности соответствующих акселерометров.
- погрешности соответствующих акселерометров.
Выражения для управляющих сигналов гироскопа определим следующие
где 
 - горизонтальная составляющая абсолютной угловой скорости объекта, выработанная с учетом сигналов внешних источников.
- горизонтальная составляющая абсолютной угловой скорости объекта, выработанная с учетом сигналов внешних источников.
Уравнения движения (функционирования системы) будут
ΩЕ= ΩЕупр
ΩN= ΩNупр
Управления ошибок примут вид (для α<10°):
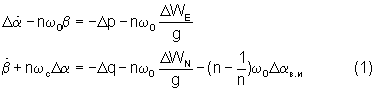
Из (1) следует, например, что ошибка определения и время готовности выработки курса существенно уменьшаются.
Источники информации:
1. В.А.Беленький. Патент на изобретение №2251078.
2. А.В.Репников, Г.П.Сачков, А.И.Черноморский. "Гироскопические системы".
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА (ВАРИАНТЫ) | 2005 |
|
RU2272995C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2004 |
|
RU2257545C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ | 2007 |
|
RU2346240C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2003 |
|
RU2247944C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1991 |
|
RU2046289C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2003 |
|
RU2251078C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2003 |
|
RU2247324C1 |
| СПОСОБ ДЕМПФИРОВАНИЯ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ | 2006 |
|
RU2315956C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2004 |
|
RU2256879C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2002 |
|
RU2206067C1 |
Изобретение относится к гироскопическому приборостроению и может быть использовано для обеспечения навигации морских, воздушных и наземных объектов. Способ выработки навигационных параметров и вертикали места заключается в том, что управляющие сигналы гироплатформы или модели гироплатформы при аналитическом решении задач ориентации формируют таким образом, чтобы обеспечить связь между скоростной девиацией α и горизонтальной составляющей абсолютной угловой скорости объекта  ,
,  , где
, где  - горизонтальная составляющая абсолютной угловой скорости объекта, ω0 - частота Шулера, n - параметр системы больше единицы. Технический результат: уменьшение ошибки определения и времени готовности выработки курса объекта. 1 ил.
- горизонтальная составляющая абсолютной угловой скорости объекта, ω0 - частота Шулера, n - параметр системы больше единицы. Технический результат: уменьшение ошибки определения и времени готовности выработки курса объекта. 1 ил.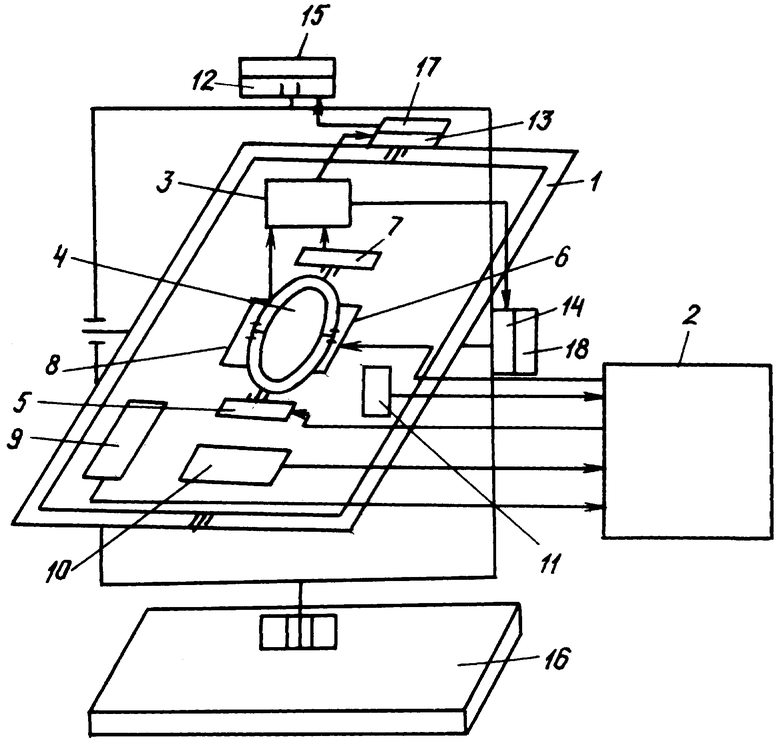
Способ выработки навигационных параметров и вертикали места, включающий измерение составляющих кажущегося ускорения при помощи акселерометров, оси чувствительности которых связаны с гироплатформой, формирование сигналов управления гироплатформой, отработку сформированных сигналов при помощи гироскопа или датчиков абсолютной угловой скорости, или включающий измерение сигналов гироскопов или датчиков абсолютной угловой скорости, оси которых направлены по осям приборного трехгранника, аналитическое решение задачи ориентации путем моделирования работы инерциальной системы, выработку навигационных параметров и вертикали места, отличающийся тем, что управляющие сигналы гироплатформы или модели гироплатформы при аналитическом решении задач ориентации формируют таким образом, чтобы обеспечить связь между скоростной девиацией α и горизонтальной составляющей абсолютной угловой скорости объекта  ,
,
 ,
,
где - горизонтальная составляющая абсолютной угловой скорости объекта;
ω0 - частота Шулера;
n - параметр системы больше единицы.
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2003 |
|
RU2251078C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1995 |
|
RU2098763C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2003 |
|
RU2247944C2 |
| US 4583178 A, 15.04.1986 | |||
| О^ЗНАЯ | 0 |
|
SU392104A1 |
| Складной поддон | 1984 |
|
SU1212876A2 |

