Область техники
Настоящее изобретение относится к электромагнитной разведке полезных ископаемых. В частности, настоящее изобретение относится к генерированию электромагнитных (ЕМ) полей при проведении разведки на коллекторы углеводородов и другие формации, распознаваемые по их электрическим свойствам.
Уровень техники
Определение отклика подземных пластов, расположенных в земной коре, на электромагнитные поля представляет собой ценный инструмент в области геофизического исследования. Таким образом, можно изучать геологические процессы, происходящие в областях с термической, гидротермической или магматической активностью. Кроме того, технологии электромагнитного зондирования могут предоставить ценные данные о природе (и, в частности, о возможном содержании углеводородов) подземных коллекторов в контексте изысканий и разведки на содержащуюся под землей нефть.
Традиционно при изысканиях на нефть для определения наличия, расположения и объема коллекторов в подземных пластах скальных пород используются сейсмические технологии. Хотя сейсморазведка способна распознавать такие структуры, эта технология часто не позволяет определить различие между возможными составами жидкостей в порах внутри этих структур, особенно для содержащихся в порах жидкостей, имеющих похожие механические свойства.
Хотя заполненные нефтью и заполненные водой коллекторы похожи с механической точки зрения, они обладают значительно отличающимися электрическими свойствами, которые могут быть определены посредством активной электромагнитной разведки. Активная электромагнитная разведка основана на генерировании электромагнитного поля при помощи электромагнитного источника, располагаемого вблизи от морского дна. Затем энергия из этого источника распространяется, рассеиваясь через подземные пласты, и измеряется удаленными приемниками, расположенными на морском дне или вблизи от него. Термин «активный» используется для проведения отличия от пассивной электромагнитной технологии магнито-теллурической (МТ) съемки, которая измеряет отклик подземных пластов на электромагнитные поля, генерируемые естественным образом в верхних слоях атмосферы земли.
Стандартный электромагнитный источник, используемый для активной электромагнитной разведки, представляет собой симметричную вибраторную антенну, выпущенную из буксируемого подводного аппарата, часто именуемого подводным буксируемым транспортным средством (UTV) или дистанционно управляемым транспортным средством (ROV), причем в нижеследующем описании используется последний термин. Симметричный вибратор приводится в действие электрическим сигналом соответствующей формы, подаваемым с разведочного транспортного средства, то есть с надводной части. Важно, чтобы электромагнитный источник обладал высокой мощностью, поскольку рассеивающийся электромагнитный сигнал, который распространяется через подземные пласты, сильно затухает, в результате чего сигналы, принимаемые датчиками, являются слабыми. Чтобы антенна генерировала мощный сигнал, дистанционно управляемое транспортное средство (ROV) должно принимать с надводной части по передающему кабелю сигнал высокой мощности. В этом случае имеют место обычные сложности передачи электрического сигнала высокой мощности по кабелю, такие как потеря при передаче, временное смещение, согласование полного сопротивления и тому подобное.
В известной конструкции (например, GB 2381 137А) предусматривается использование генератора переменного тока и повышающего трансформатора на надводной части и преобразование электрической формы сигнала в сигнал с высоким напряжения/ низким током для передачи с надводной части к дистанционно управляемому транспортному средству, что сокращает потери при передаче в кабеле. После передачи дистанционно управляемому транспортному средству сигнал с высоким напряжением/ низким током подвергается обратному преобразованию в сигнал с низким напряжения/ высоким током, который затем используется для возбуждения выпущенной антенны. Выпущенная антенна содержит два электрода, расположенных с промежутком вдоль длины антенны, которые в погруженном состоянии отделены друг от друга морской водой. Однако, хотя морская вода обеспечивает канал для протекания электрического тока между электродами, она также является нагрузкой с высокой по своей природе индуктивностью. На практике это вызывает проблемы, поскольку высокая индуктивность нагрузки приводит при переключении тока к генерированию противоэлектродвижущей силы. В результате эта противоэлектродвижущая сила порождает переходные процессы по напряжению, которые могут повредить элементы внутри источника волнового сигнала.
Другим значительным критерием при разработке идеального активного электромагнитного источника является форма волны, которую он способен формировать. Идеальный электромагнитный источник должен быть способен генерировать любую произвольную функциональную форму. На практике важным профилем, который следует вырабатывать, является волна в форме меандра (или волна в форме последовательности прямоугольных импульсов). Это представляет интерес не только по причине основной частоты, но также по причине гармоник более высокого порядка, которые возникают, как должно быть понятно из разложения в ряд Фурье волны в форме меандра. Иначе говоря, источник волн в форме меандра может быть использован в качестве многочастотного источника. Поэтому важно иметь возможность формировать волну в форме «чистого» меандра с надлежащим образом определенными амплитудными и временными характеристиками.
В указанном известном устройстве понижающий преобразователь частоты переменного напряжения выполняет двухполупериодное выпрямление входной формы сигнала переменного тока на заранее заданном количестве периодов, обеспечивая прошедшую двухполупериодное выпрямление форму сигнала положительной полярности с удвоенной частотой. После формирования прошедшей двухполупериодное выпрямление формы сигнала положительной полярности, полярность выпрямления меняется на обратную для дальнейшего заранее заданного количества периодов, для формирования прошедшей двухполупериодное выпрямление формы сигнала отрицательной полярности с удвоенной частотой. Совместно прошедшие двухполупериодное выпрямление формы сигнала положительной и отрицательной полярности формируют волну типа «меандр».
Периодическое переключение полярности выпрямления может быть выполнено кратным половине длины волны входного переменного тока (чтобы обеспечить форму меандра, имеющую основную частоту, соответствующую входной форме сигнала переменного тока) посредством обнаружения и подсчета количества пересечений нулевого уровня, имеющих место в входном сигнале переменного тока. Такая форма волны аппроксимации меандра имеет две основные частотные составляющие, а именно: нижнюю основную частотную составляющую, которая соответствует частоте переключения полярности, и высшую частотную составляющую, которая представляет собой кратное частоты входного сигнала переменного тока.
Благодаря широкому и успешному использованию стали очевидны ограничения известной конструкции понижающего преобразователя частоты переменного напряжения. Нежелательны отклонения по фазе и амплитуде сигнала переменного тока, генерируемого антенной. Эти проблемы возникают бульшей частью из-за смещения и переменного ослабления сигнала во время передачи сигнала переменного тока с надводной части на дистанционно управляемое транспортное средство (ROV). Хронирование переключения полярности на дистанционно управляемом транспортном средстве зависит от стабильности фазы сигнала переменного тока, а он может ухудшиться из-за индуктивных и емкостных явлений при передаче с надводной части. Например, ухудшение сигнала переменного тока может породить ложные точки пересечения нулевого уровня или привести к невозможности обнаружения реальной точки пересечения нулевого уровня, что, в свою очередь, может иметь своим результатом запуск переключения полярности в неправильный момент времени. Таким образом, эффективная работа понижающего преобразователя частоты переменного напряжения требует надлежащего контроля стабильности подаваемого сигнала переменного тока и уменьшения, насколько возможно, любых проявлений нестабильности посредством дополнительных конструктивных признаков в дистанционно управляемом транспортном средстве (ROV). Кроме того, продолжительность перехода при аппроксимации меандра от положительной к отрицательной полярности и наоборот зависит от частоты подаваемого переменного тока.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Технической задачей настоящего изобретения является создание специального высокочастотного генерирующего оборудования для быстрого возбуждения понижающего преобразователя частоты переменного напряжения и сокращения продолжительности переходного процесса.
Согласно первому аспекту настоящего изобретения поставленная задача решена путем создания подводного генератора электромагнитного поля (ЕМ) для электромагнитной разведки морского дна, содержащего преобразователь переменного тока в постоянный ток, обеспечивающий генерирование выходного сигнала постоянного тока из входного сигнала переменного тока, переключающий модуль, обеспечивающий генерирование сигнала, задающего форму волны, посредством избирательного переключения выходного сигнала постоянного тока, и антенну для генерирования электромагнитного поля в ответ на сигнал, задающий форму волны.
Путем генерирования сигнала, задающего форму волны, из выходного сигнала постоянного тока не только аппроксимируются волны в форме меандра, имеющие крутые характеристики переходных участков, но сигнал, задающий форму волны, по существу, не зависит от характеристик входного сигнала переменного тока. Кроме того, предложенная конструкция подводного генератора электромагнитного поля на дистанционно управляемом транспортном средстве (ROV) не требует для своего возбуждения специализированного высокочастотного источника электропитания. Например, базирующийся на дистанционно управляемом транспортном средстве генератор поля может возбуждаться стандартным судовым блоком электропитания с частотой 50/60 герц, расположенным на надводной части.
Согласно второму аспекту настоящего изобретения предложена система генерирования электромагнитного (ЕМ) поля, предназначенная для электромагнитной разведки морского дна, содержащая подводный генератор электромагнитного поля, согласно первому аспекту настоящего изобретения, источник электропитания, электрически связанный с преобразователем переменного тока в постоянный ток, входящим в состав генератора электромагнитного поля, и управляющий модуль, связанный с контроллером подводного генератора электромагнитного поля. Управляющий модуль предназначен для управления сигналом, задающим форму волны, который возбуждает антенну.
Управляющий модуль может быть расположен в надводном транспортном средстве и может использоваться дистанционно для управления электромагнитным полем, генерируемым подводным генератором электромагнитного поля. Это в свою очередь обеспечивает генерирование электромагнитных полей под морским дном, имеющих известные и/или переменные профили, и позволяет синхронизировать генерирование этих электромагнитных полей с расположенным на поверхности управляющим модулем.
В разнообразных вариантах осуществления изобретения управляющий модуль функционально связан с приемником системы GPS (глобальной спутниковой системы радиоопределения), который позволяет контроллеру надводной части координировать как генерирование электромагнитных полей, так и измерение воздействий этих электромагнитных полей на находящиеся под морским дном пласты. Контроллер на надводной части может активировать управляющий модуль и получить данные измерения электромагнитной разведки, снабженные временной меткой и синхронизированные с абсолютным временем, указанным передатчиком системы GPS (глобальной спутниковой системы радиоопределения).
Согласно третьему аспекту настоящего изобретения предложен способ генерирования электромагнитного (ЕМ) поля для электромагнитной разведки морского дна, заключающийся в том, что используют сигнал переменного тока и генерируют сигнал постоянного тока из этого сигнала переменного тока, генерируют сигнал, задающий форму волны, посредством переключения сигнала постоянного тока, и возбуждают симметричный вибратор посредством сигнала, задающего форму волны, для генерирования электромагнитного поля.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на прилагаемые чертежи, на которых:
Фиг.1 изображает систему разведки морского дна, содержащую подводный генератор электромагнитного поля, согласно изобретению;
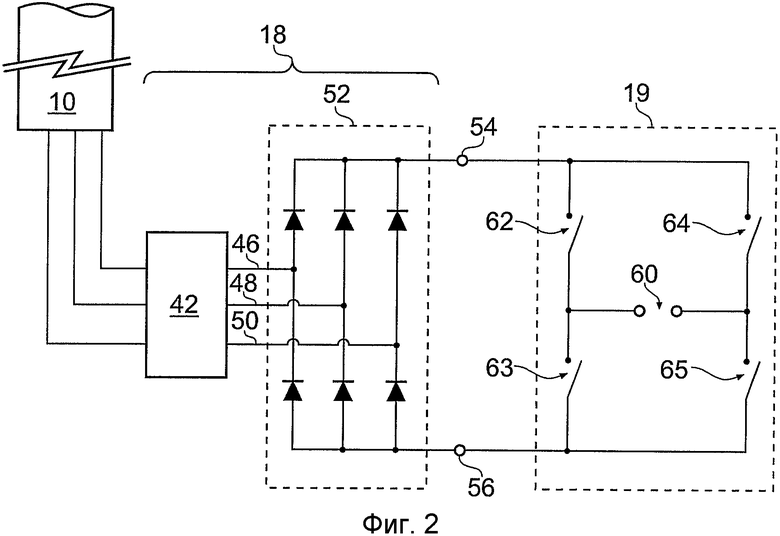
Фиг.2 - преобразователь переменного тока в постоянный ток и переключающий модуль для использования в подводном генераторе электромагнитного поля, согласно изобретению;
Фиг.3 - переключающий модуль и схемы подавления переходных процессов, предназначенные для использования в подводном генераторе электромагнитного поля, согласно изобретению;
Фиг.4 - схему системы генерирования электромагнитного поля, предназначенной для электромагнитной разведки морского дна, согласно изобретению;
Фиг.5 - схему сигнала, задающего форму волны, генерируемого подводным генератором электромагнитного поля, согласно изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ ИЗОБРЕТЕНИЯ
Система 1 (Фиг.1) разведки морского дна содержит подводный генератор 5 электромагнитного поля. Генератор 5 электромагнитного поля переносится подводным транспортным средством 12, который буксируется надводным транспортным средством 4. Подводное транспортное средство 12 остается на приблизительно постоянном расстоянии над морским дном 22. Это разделяющее расстояние достигается посредством использования модуля 14 эхолокации, измеряющего расстояние от морского дна 22 до подводного транспортного средства 12 и ретрансляции информации об измеренном разделяющем расстоянии надводному транспортному средству 4. Глубина погружения подводного транспортного средства 12 может быть скорректирована посредством наматывания на барабан или выпускания на соответствующую длину связующего кабеля 10, или иным образом (например, посредством управления подводным транспортным средством 12 при помощи бортовых гидравлических домкратов и/или гидродинамических поверхностей).
Силовой и управляющий сигналы передаются с надводного транспортного средства 4 подводному транспортному средству 12 по связующему кабелю 10, который также обеспечивает механическую связь между надводным транспортным средством 4 и подводным транспортным средством 12. Силовой и управляющий сигналы используются генератором 5 электромагнитного поля для генерирования электромагнитного поля, которое проникает через морское дно 22 в расположенные под дном моря пласты 24, 26.
При взаимодействии электромагнитного поля с расположенными под дном моря пластами 24, 26 формируется сигнал электромагнитного поля. Этот сигнал электромагнитного поля несет информацию, касающуюся состава расположенных под морем пластов 24, 26, которая может быть использована для идентификации типа жидкости, содержащейся в расположенных под дном моря, вмещающих жидкость пластах 26. Составляющую сигнала электромагнитного поля обнаруживают одна или более принимающих антенн 28, расположенных на некотором расстоянии от подводного транспортного средства 12. Прямая передача электромагнитного поля между генератором 5 электромагнитного поля и принимающими антеннами 28 сильно ослабляется морской водой, имеющей высокую проводимость, а в случае, когда разделяющее расстояние составляет более чем несколько сотен метров, вклад этой составляющей в принимаемый сигнал электромагнитного поля является ничтожно малым.
Обычно, предусматриваются решетка или сеть из принимающих антенн 28, каждая из которых лежит в соответствующем заранее заданном месте на морском дне 22. Каждая из принимающих антенн 28 функционально соединена с соответствующим дистанционным инструментальным блоком 30 и дистанционно разворачиваемым плавающим устройством 32. Дистанционные инструментальные блоки 30 записывают данные, соответствующие сигналу электромагнитного поля, обнаруженному принимающими антеннами 28. Часы в дистанционных инструментальных блоках 30 синхронизируются перед размещением на морском дне 22 с главными часами (не показаны) на надводном транспортном средстве. После завершения электромагнитной разведки из надводного транспортного средства 4 в дистанционно разворачиваемые плавающие устройства 32 посылается сигнал дистанционной активации, вызывающий разворачивание этих устройств и подъем ими дистанционных инструментальных блоков 30 на поверхность моря для извлечения данных. После извлечения данные из дистанционных инструментальных блоков 30 могут быть проанализированы в спокойной обстановке.
Генератор 5 электромагнитного поля содержит преобразователь 18 переменного тока в постоянный ток, переключающий модуль 19 и антенну 20. Переключающий модуль 19 генерирует сигнал, задающий форму волны, посредством переключения различных уровней сигнала постоянного тока на антенну 20. Например, на антенну 20 может быть переключено положительное напряжение постоянного тока, за которым следует нулевой уровень напряжения, что аппроксимирует один период сигнала, задающего форму волны, подобную волне в виде меандра.
Входной сигнал переменного тока передается из источника 6 электропитания на надводном транспортном средстве 4 преобразователю 18 переменного тока в постоянный ток, входящему в состав генератора 5 электромагнитного поля, по связующему кабелю 10. Например, источник 6 электропитания может вырабатывать трехфазную гармоническую волну с частотой 50 или 60 герц, имеющую удвоенную амплитуду напряжения, равную 4500 вольт. Использование переменного тока с высоким напряжением позволяет добиться эффективной передачи энергии между источником 6 электропитания и генератором 5 электромагнитного поля. Кроме того, источник 6 электропитания может представлять собой блок трехфазного электропитания, причем все три фазы передаются по связующему кабелю 10. Трехфазное электропитание не только обеспечивает повышенную эффективность преобразования энергии, но оно также может быть использовано для получения менее неравномерного выходного сигнала постоянного тока на преобразователе 18 переменного тока в постоянный ток, который имеет меньшее количество компонентов. Дополнительные улучшения в отношении снижения неравномерности могли бы быть сделаны при использовании более чем трех фаз.
Управляющие сигналы генерируются управляющим модулем 8, расположенным в надводном транспортном средстве 4, и передаются по волоконно-оптической линии связи в связующем кабеле 10 контроллеру 16, расположенному в подводном транспортном средстве 12. Использование волоконно-оптической линии связи имеет преимущество, поскольку оно обеспечивает только малое постоянное время запаздывания при передаче между генерированием управляющих сигналов в надводном транспортном средстве 4 и их приемом контроллером 16. Управляющий модуль 8 функционально связан с приемником 3 системы GPS (глобальной спутниковой системы радиоопределения). Приемник 3 системы GPS принимает хронирующие сигналы системы GPS, передаваемые из базирующегося на спутнике передатчика 2 системы GPS. На основе этих хронирующих сигналов системы GPS и внутренних электронных схем управляющий модуль 8 может вырабатывать хронирующие сигналы, включая в их число высокочастотные синхронизирующие сигналы (например, с частотой 1024 герца) и низкочастотные синхронизирующие сигналы (например, импульсный или пакетный сигнал, передаваемый каждую минуту). Синхронизирующие сигналы передаются контроллеру 16 управляющим модулем 8.
Благодаря использованию управляющего модуля 8 с приемником 3 системы GPS контроллер 16 может управляться дистанционно синхронно, вырабатывая сигналы, задающие форму волны, в известные моменты времени по отношению к хронирующим сигналам системы GPS. Кроме того, посредством контроллера 16 может производиться сбор данных, и данные могут быть снабжены временной меткой в момент сбора данных на подводном транспортном средстве 12 при этом точные временные метки генерируются по отношению к времени системы GPS. Помимо этого, сигнал электромагнитного поля может быть модулирован таким образом, чтобы включать в себя сигнал временнуй метки, указывающей абсолютное время, в которое генерировался сигнал электромагнитного поля, тем самым уменьшая потребность в том, чтобы дистанционные инструментальные блоки 28 включали в себя точные часы, синхронизированные с управляющим модулем 8, расположенным в надводном транспортном средстве 4. Сигнал временной метки может быть записан дистанционными инструментальными блоками 28 и впоследствии использован при анализе данных для идентификации типа жидкости во вмещающих жидкость пластах 26.
Следует понимать, что хотя для удобства была сделана конкретная ссылка на систему GPS, вместо нее могли бы быть использованы другие синхронизирующие сигналы, передаваемые беспроводным способом, если они доступны или станут доступными в будущем. Они могут идти от наземных радиомаяков или от спутников. Например, в прибрежных водах для уровня отсчета времени могут быть использованы сигналы мобильного телефона.
Кроме того, управляющий модуль 8 может передавать управляющие сигналы контроллеру 16. Эти управляющие сигналы отдают контроллеру 16 команду привести в действие переключающий модуль 19, чтобы он вырабатывал разнообразные сигналы, задающие формы волн. Например, управляющие сигналы могут выбирать конкретные сигналы, задающие формы волн, имеющие разнообразные отличающиеся друг от друга частоты, коэффициенты заполнения, амплитуды, профили формы волны и т.д.
На фиг.2 показан преобразователь 18 переменного тока в постоянный ток и переключающий модуль 19 для использования в подводном генераторе 5 электромагнитного поля. Трехфазное электропитание (например, 4500 вольт) подается на преобразователь 18 переменного тока в постоянный ток по связующему кабелю 10. Преобразователь 18 переменного тока в постоянный ток выпрямляет трехфазный входной сигнал, вырабатывая на электрических шинах 54 и 56 положительные и отрицательные сигналы постоянного тока двойного напряжения. Сигналы постоянного тока электрических шинах 54 и 56 переключаются переключающим модулем 19 для создания сигнала, задающего форму волны, на выходных электродах 60 формы волны.
Преобразователь 18 переменного тока в постоянный ток содержит трехфазный понижающий трансформатор 42 и мостовой выпрямитель 52. Трехфазное электропитание подается со связующего кабеля 10 на первичные обмотки трехфазного понижающего трансформатора 42. Трехфазный понижающий трансформатор 42 обеспечивает три выходные фазы 46, 48, 50. Для каждой из этих трех выходных фаз 46, 48, 50 вырабатывается сигнал переменного тока с пониженным напряжением, например, на уровне 74 В.
Мостовой выпрямитель 52 содержит три набора, каждый набор содержит два диода, соединенных последовательно между электрическими шинами 54, 56. Каждая выходная фаза 46, 48, 50 возбуждает соответствующую пару диодов в соединительной точке между этими двумя диодами. Диоды в паре диодов поочередно приводятся в проводящее состояние на полный период трехфазного электропитания, тем самым генерируя сигнал постоянного тока положительной полярности на первой шине 54 и сигнал постоянного тока отрицательной полярности на второй шине 56.
Переключающий модуль 19 содержит первую пару переключателей 62, 63 и вторую пару переключателей 64, 65, каждый из которых соединен последовательно между электрическими шинами 54, 56. Каждая соединительная точка между переключателями в паре переключателей предоставляет выходной электрод 60 формы волны. Для обеспечения защиты для переключателей от наведенной противоэлектродвижущей силы, генерируемой при приведении в действие переключателей 62, 63, 64, 65, могут быть использованы схемы подавления всплесков, например, включающие в себя один или более диодов (не показаны). Для того, чтобы генерировать сигнал, задающий форму волны, на выходных электродах 60 формы волны, каждый из переключателей 62, 63, 64, 65 в паре переключателей приводится в действия в соответствии с заранее заданной последовательностью.
Один возможный вариант заключается в том, чтобы вырабатывать трехуровневый сигнал, задающий форму волны, генерируя последовательность прямых электрических токов, обратных электрических токов и нулевых электрических токов между выходными электродами 60 формы волны. Прямой электрический ток может генерироваться посредством одновременного замыкания переключателя 63 первой пары переключателей и переключателя 64 второй пары переключателей, что заставляет электрический ток течь в первом направлении между выходными электродами 60 формы волны. Нулевой электрический ток получают, обеспечивая, чтобы все из переключателей 62, 63, 64, 65 были открыты. Обратный электрический ток может генерироваться посредством одновременного замыкания переключателя 62 первой пары переключателей и переключателя 65 второй пары переключателей, что заставляет электрический ток течь между выходными электродами 60 формы волны в направлении, противоположном первому направлению.
Выходные электроды 60 формы волны могут быть соединены с парой медных электродов, которые образуют антенну 20. Медные электроды используются для того, чтобы пропускать электрический ток через морскую воду, чтобы генерировать электромагнитное поле в ответ на сигнал, задающий форму волны. Такого рода антенна 20 эквивалентна нагрузке с низким активным сопротивлением и высокой индуктивностью.
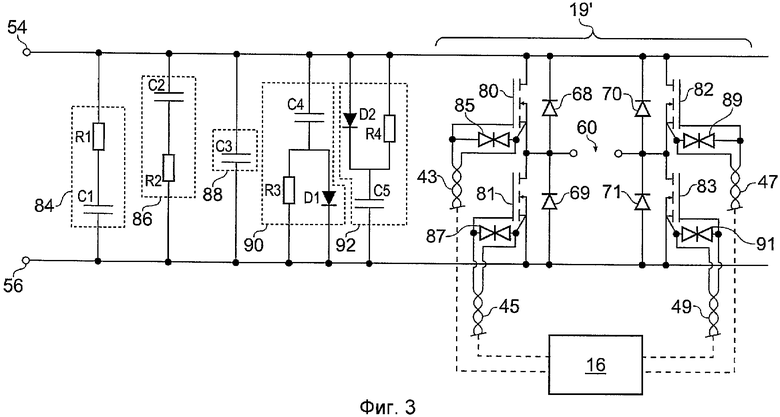
На фиг.3 показан переключающий модуль 19' и схемы подавления переходных процессов, предназначенные для использования в подводном генераторе 5 электромагнитного поля. Переключающий модуль 19' и схемы подавления переходных процессов могут быть использованы вместо переключающего модуля 19.
Переключающий модуль 19' содержит первую пару MOSFET- переключателей (переключателей на основе полевых транзисторов со структурой металл-оксид-полупроводник) 80, 81 и вторую пару MOSFET-переключателей 82, 83, каждые из которых соединены последовательно между электрическими шинами 54, 56. Каждая соединительная точка между MOSFET-переключателями в паре MOSFET-переключателей предоставляет выходные электроды 60 формы волны. Кроме того, каждый из MOSFET-переключателей 80, 81, 82, 83 в парах MOSFET-переключателей соединен параллельно с соответствующим диодом 68, 69, 70, 71, который обеспечивает защиту MOSFET-переключателям от наведенной противоэлектродвижущей силы, генерируемой при приведении в действие MOSFET-переключателей 80, 81, 82, 83. Чтобы генерировать сигнал, задающий форму волны на выходных электродах 60 формы волны, каждый из MOSFET-переключателей 80, 81, 82, 83 в паре MOSFET-переключателей приводится в действие в соответствии с заранее заданной последовательностью посредством блока 16 управления, который подает управляющие сигналы на электроды затворов MOSFET-переключателей 80, 81, 82, 83.
Исток каждого MOSFET-переключателя (переключателя на основе полевых транзисторов со структурой металл-оксид-полупроводник) 80, 81, 82, 83 соединен с первым концом соответствующего подавителя 85, 87, 89, 91 напряжения переходного процесса и соответствующим первым подводящим проводом пары 43, 45, 47, 49 соединителя истока Кельвина (Kelvin). Затвор каждого MOSFET-переключателя 80, 81, 82, 83 соединен со вторым концом соответствующего подавителя 85, 87, 89, 91 напряжения переходного процесса и соответствующим вторым подводящим проводом пары 43, 45, 47, 49 соединителя истока Кельвина (Kelvin). Каждая пара 43, 45, 47, 49 соединителей истока Кельвина каждая соединяет исток и затвор соответствующего MOSFET-переключателя 80, 81, 82, 83 с блоком 16 управления.
Блок 16 управления может представлять собой автономный блок, который функционирует изолированно для формирования заранее определенного сигнала, задающего форму волны, или может управляться дистанционно, например, посредством подачи сигналов с надводного транспортного средства 4.
Использование твердотельных переключателей, таких как, например, MOSFET-переключатели (переключатели на основе полевых транзисторов со структурой металл-оксид-полупроводник), позволяет обеспечить надежное быстрое переключение. Более того, один или более из MOSFET-переключателей 80, 81, 82, 83 могут быть полупроводниковыми переключающими элементами другого типа, например, транзисторами IGBT (биполярными транзисторами с интегрированным затвором), и/или множеством MOSFET-переключателей, или другими полупроводниковыми переключателями, соединенными параллельно и имеющими общие соединения с электродом затворов, чтобы повысить пропускную способность переключателей.
Схемы подавления переходных процессов содержат набор отдельных схем 84, 86, 88, 90, 92 подавления переходных процессов и предназначены для того, чтобы переключающий модуль 19' переключал сигналы с высокой мощностью (например, >10 киловатт) без повреждения MOSFET-переключателей 80, 81, 82, 83. Каждая из схем 84, 86, 88, 90, 92 подавления переходных процессов представляет собой элемент подавления, настроенный на конкретную частоту или диапазон частот, определенный природой переходных явлений. Значения параметров, используемые для элементов схем подавления переходных процессов, определяются, следуя анализу характеристик системы передачи энергии, таких как индуктивность связующего кабеля 10, электрических шин 54, 56 и т.д. Приводимые в качестве примера значения, используемые в одной конструкции, составляют: С4=С5=6800 микрофарад, 385 вольт; С3=30 микрофарад, 250 вольт; С1=С2=1 микрофарада; D1=85 ампер; R3=R4=10 ом, 500 ватт; R1=1 ом, 2 ватта. Отмечено, что для повышения суммарных характеристик подавления переходных процессов в подводном генераторе 5 электромагнитного поля может быть предусмотрено множество таких наборов схем подавления переходных процессов.
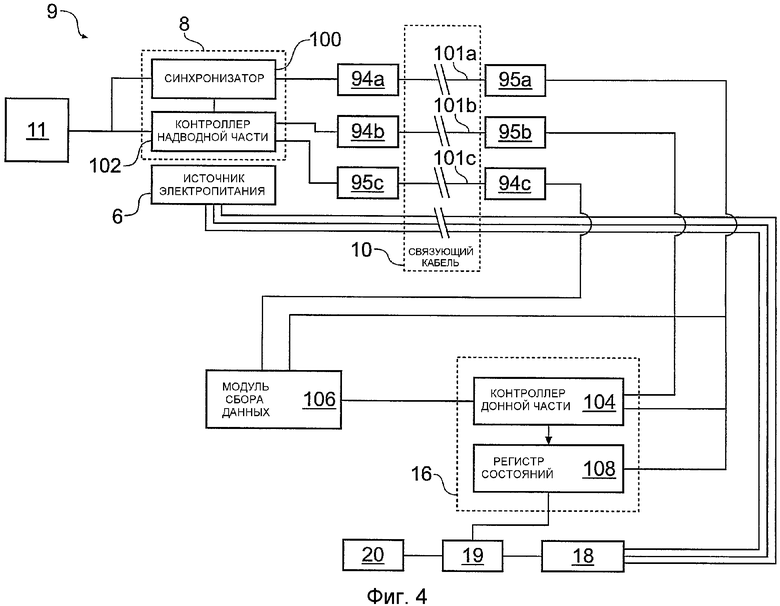
На фиг.4 представлена схема системы 9 генерирования электромагнитного поля, предназначенной для электромагнитной разведки морского дна. Система 9 генерирования электромагнитного поля содержит источник 6 электропитания и управляющий модуль 8. Регулируемый по системе GPS генератор 11 синхронизирующих импульсов функционально соединен с управляющим модулем 8. Регулируемый по системе GPS генератор 11 синхронизирующих импульсов, источник 6 электропитания и управляющий модуль 8 обычно расположены на надводном транспортном средстве 4. Система 9 генерирования электромагнитного поля также включает в себя контроллер 16, модуль 106 сбора данных, преобразователь 18 переменного тока в постоянный ток, переключающий модуль 19 и антенну 20, обычно расположенную на подводном транспортном средстве 12.
Электропитание переменного тока подается из источника 6 электропитания преобразователю 18 переменного тока в постоянный ток по связующему кабелю 10. Преобразователь 18 переменного тока в постоянный ток генерирует один или более сигналов постоянного тока, которые затем могут быть переключены переключающим модулем 19 таким образом, чтобы сформировать сигнал, задающий форму волны, для возбуждения антенны 20 для создания электромагнитного поля.
Управляющий модуль 8 содержит синхронизатор 100 и контроллер 102 надводной части. Контроллер 102 надводной части обеспечивает центральное управление и регистрацию данных, и может быть снабжен одной или более компьютерными системами, которые в качестве возможного варианта могут быть объединены в сеть. Контроллер 102 надводной части синхронизируется по низкочастотному синхронизирующему сигналу, например, каждую минуту и/или секунду, сформированному регулируемым по системе GPS генератором 11 синхронизирующих импульсов. Низкочастотный синхронизирующий сигнал используется контроллером 102 надводной части для синхронизации разнообразных синхронизирующих импульсов в системе 9 генерирования электромагнитного поля. Использование регулируемого по системе GPS генератора 11 синхронизирующих импульсов предоставляет возможность установить синхронизирующие импульсы контроллера на точное абсолютное время.
Регулируемый по системе GPS генератор 11 синхронизирующих импульсов предназначен для генерирования в синхронизаторе 100 синтезированного высокочастотного синхронизирующего сигнала, то есть с частотой от 1 до 5 килогерц, например, 1024 герц. Высокочастотный синхронизирующий сигнал используется системой 9 генерирования электромагнитного поля в качестве глобального главного синхронизирующего импульса и обеспечивает малое временное смещение (например, <10-20) между различными синхронизирующими импульсами контроллера между операциями синхронизации.
Высокочастотный синхронизирующий сигнал передается по волоконно-оптической линии 101а связи через связующий кабель 10. Волоконно-оптическая линия 101а связи содержит передающий модуль 94а на лазерных диодах и оптический приемный модуль 95а. Оптический приемный модуль 95а предоставляет высокочастотный синхронизирующий сигнал контроллеру 104 донной части (расположенной около дна части оборудования) и регистру 108 состояний, образующим элементы контроллера 16. Высокочастотный синхронизирующий сигнал также передается по волоконно-оптической линии 101а связи к модулю 106 сбора данных.
Волоконно-оптическая линия 101b связи предоставляет контроллеру 104 донной части управляющую линию связи. Контроллер 102 надводной части поддерживает связь с контроллером 104 донной части через посредство волоконно-оптической линии 101b связи и информирует контроллер 104 донной части, когда тот может ожидать приема сигнала синхронизации. Волоконно-оптическая линия 101b связи также используется для других управляющих коммуникаций, таких как программирование формы волны, подлежащей генерированию. Волоконно-оптическая линия 101b связи также может быть использована для передачи в обратном направлении разнообразных данных, собранных контроллером 104 донной части. Волоконно-оптические линии 101b и 101 с связи могут быть объединены в единую линию связи. Например, при единой волоконно-оптической линии связи может быть использовано мультиплексирование.
При нормальной работе хронирование переключающего модуля 19 опирается на синтезированный высокочастотный синхронизирующий сигнал, передаваемый контроллеру 104 донной части и регистру 108 состояний. Контроллер 104 донной части подсчитывает синхронизирующие импульсы, и при приближении отсчитанного количества, соответствующего изменению состояния переключателей сигнала, задающего форму волны, и заданного запрограммированной формой волны, он передает регистру 108 состояний команду на изменение в соответствующий момент времени конфигурации переключения переключающего модуля 19. Это обеспечивает точное хронирование, поскольку регистр 108 состояний, который представляет собой логическое устройство с постоянным временем запаздывания, выполняет операцию переключения с известным запаздыванием между операцией переключения и высокочастотным синхронизирующим сигналом.
Если бы контроллеру 104 донной части приходилось бы напрямую приводить в действие переключающий модуль 19 без регистра 108 состояний, то постоянство запаздывания по переключению снизилось бы, и это запаздывание в среднем увеличилось бы, даже если бы контроллеру 104 донной части пришлось работать в реальном масштабе времени. Кроме того, использование регистра 108 состояний предоставляет контроллеру 104 донной части возможность поддерживать связь по волоконно-оптической линии 101b связи, используя, например, последовательный или основанный на пакетах протокол связи, что не влияет на хронирование операций переключения.
Синхронизатор 100 передает высокочастотный синхронизирующий сигнал по волоконно-оптической линии 101а связи. Он также используется для того, чтобы синхронизирующие импульсы контроллера донной части были связаны с временем системы GPS. Контроллер 102 надводной части достаточно точен для того, чтобы определить, когда поступит следующий низкочастотный сигнал синхронизации. Контроллер 102 надводной части настраивает синхронизатор 100 на изменение высокочастотного синхронизирующего сигнала в момент времени приема низкочастотного сигнала синхронизации. Контроллер 104 донной части интерпретирует изменение высокочастотного синхронизирующего сигнала как команду установить мгновенно или после заранее заданного времени свой счетчик в ноль. Таким образом, нулевой отсчет в контроллере 104 донной части синхронизирован с абсолютным временем.
Система 9 генерирования электромагнитного поля включает в себя модуль 106 сбора данных. Модуль 106 сбора данных может быть сконфигурирован для сбора системных данных (таких как, например, подробное измерение передаваемой формы волны, диагностическая информация и т.д.) или данных об окружающей среде (такие как, профиль морского дна, информация о температуре моря, данных об электропроводности воды и т.д.). Данные, полученные модулем 106 сбора данных могут быть снабжены временной меткой с использованием абсолютного времени и/или с использованием высокочастотного синхронизирующего сигнала. Эти данные могут быть переданы контроллеру 104 донной части или контроллеру 102 надводной части по волоконно-оптической линии 101 с связи.
При выборке данных модуля 106 сбора данных, осуществляемой контроллером 104 донной части или контроллером 102 надводной части, эти данные могут быть немедленно снабжены временной меткой с использованием значения абсолютного времени, предоставляемого в соответствии с регулируемым по системе GPS генератором 11 синхронизирующих импульсов. Абсолютное время может отслеживаться с использованием одного или более счетчиков, которые отсчитывают периоды высокочастотных синхронизирующих импульсов и/или сигналы синхронизации, такие как те, что передаются как изменения в высокочастотном синхронизирующем сигнале. Содержимое счетчиков может затем быть использовано в качестве временной метки. Это означает, что будучи собраны и снабжены временной меткой данные, которые получены в контроллере 104 донной части, который обычно расположен на значительном расстоянии от надводного транспортного средства в месте, где пространство для хранения данных и надежность данных могут служить предметом компромисса, данные могут быть переданы на большие расстояния с использованием передачи по протоколу, основанному на пакетах, такому как Ethernet, по волоконно-оптическому кабелю. Снабжение данных временной меткой обеспечивает то, что никакие запаздывания при передаче данных, например, переменное запаздывание, присущее основанному на пакетах протоколу передачи, не компрометируют эти данные.
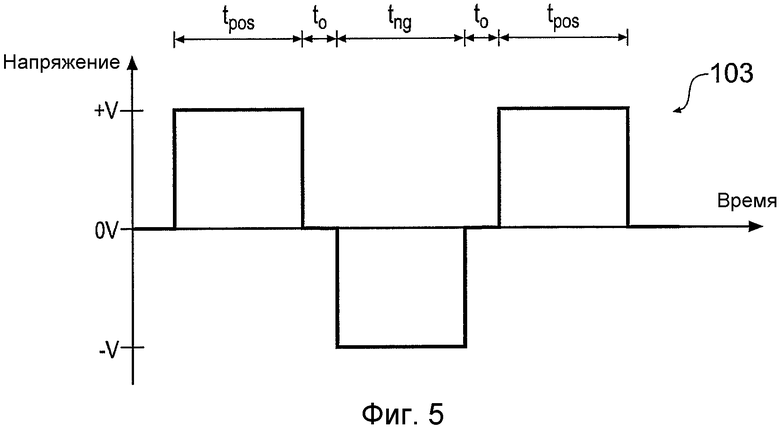
На фиг.5 показана диаграмма сигнала 103, задающего форму волны, генерируемого подводным генератором 5 электромагнитного поля. Сигнал 103, задающий форму волны, представляет собой трехуровневую аппроксимацию волны в форме меандра, вырабатываемую посредством избирательного переключения двух сигналов постоянного тока, +V и -V. Один период этой формы волны состоит из первого промежутка (tpos (tположит)) времени, во время которого сигнал постоянного тока+V переключен на выход генератора 5 электромагнитного поля. За этим следует промежуток (t0) времени нулевого сигнала, во время которого никакой из двух сигналов постоянного тока не подается на выход генератора 5 электромагнитного поля. После этого выход генератора 5 электромагнитного поля переключается на -V на промежуток (tneg (tотрицат)) времени до того момента, когда, наконец, период завершен следующим периодом (t0) времени нулевого сигнала.
Специалисты в данной области техники должны понимать, что описанные в данном документе варианты осуществления изобретения представляют собой лишь примеры. Очевидны их многочисленные варианты и модификации. Кроме этого, специалисты в данной области техники должны понимать, что антенна эквивалентна любому устройству, которое представляет симметричный вибратор, а термин волна «меандр» эквивалентен не только волне в форме чистого меандра, который переключается между только двумя уровнями. Следует также понимать, что изобретение в равной мере применимо к разведке в пресной воде, например, в больших озерах, так что ссылки на морское дно, морскую воду и т.д. не должны рассматриваться как ограничения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНАЯ РАЗВЕДКА ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2007 |
|
RU2434252C2 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ | 2014 |
|
RU2568071C1 |
| ПОДВОДНАЯ СТАНЦИЯ | 2014 |
|
RU2563316C1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СЕЙСМИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431868C1 |
| Способ навигационного оборудования морского района и самоходный подводный аппарат для его осуществления и арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2021 |
|
RU2773538C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381518C2 |
| АРКТИЧЕСКАЯ ПОДВОДНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ВОЖДЕНИЯ И НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ НАДВОДНЫХ И ПОДВОДНЫХ ОБЪЕКТОВ НАВИГАЦИИ В СТЕСНЕННЫХ УСЛОВИЯХ ПЛАВАНИЯ | 2015 |
|
RU2596244C1 |
| СПОСОБ КАРТИРОВАНИЯ КОЛЛЕКТОРА УГЛЕВОДОРОДОВ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2006 |
|
RU2428719C2 |
| СИСТЕМА СВЯЗИ СВЕРХНИЗКОЧАСТОТНОГО И КРАЙНЕНИЗКОЧАСТОТНОГО ДИАПАЗОНА С ГЛУБОКОПОГРУЖЕННЫМИ И УДАЛЕННЫМИ ОБЪЕКТАМИ | 2007 |
|
RU2350020C2 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2016 |
|
RU2634755C2 |
Изобретение относится к электромагнитной разведке полезных ископаемых. Сущность: подводный генератор электромагнитного поля (ЕМ) для электромагнитной разведки морского дна содержит преобразователь переменного тока в постоянный ток, предназначенный для генерирования выходного сигнала постоянного тока из входного сигнала переменного тока, и переключающий модуль, предназначенный для генерирования сигнала, задающего форму волны, посредством избирательного переключения выходного сигнала постоянного тока. Переключающий модуль содержит первую пару переключателей и вторую пару переключателей. Каждая пара переключателей подключена последовательно между первым и вторым выходами постоянного тока. К точкам подключения между каждой парой переключателей подключены первый и второй электроды выходных сигналов. Генератор содержит антенну для генерирования электромагнитного поля в ответ на сигнал, задающий форму волны. Антенна образована парой электродов, подключенных к соответствующим электродам выходных сигналов. Технический результат: возможность генерирования сигналов в форме меандра или в форме последовательности прямоугольных импульсов, которые имеют крутые характеристики переходных участков и, по существу, независимы от характеристик входного сигнала переменного тока. 3 н.п. ф-лы, 32 з.п. ф-лы, 5 ил.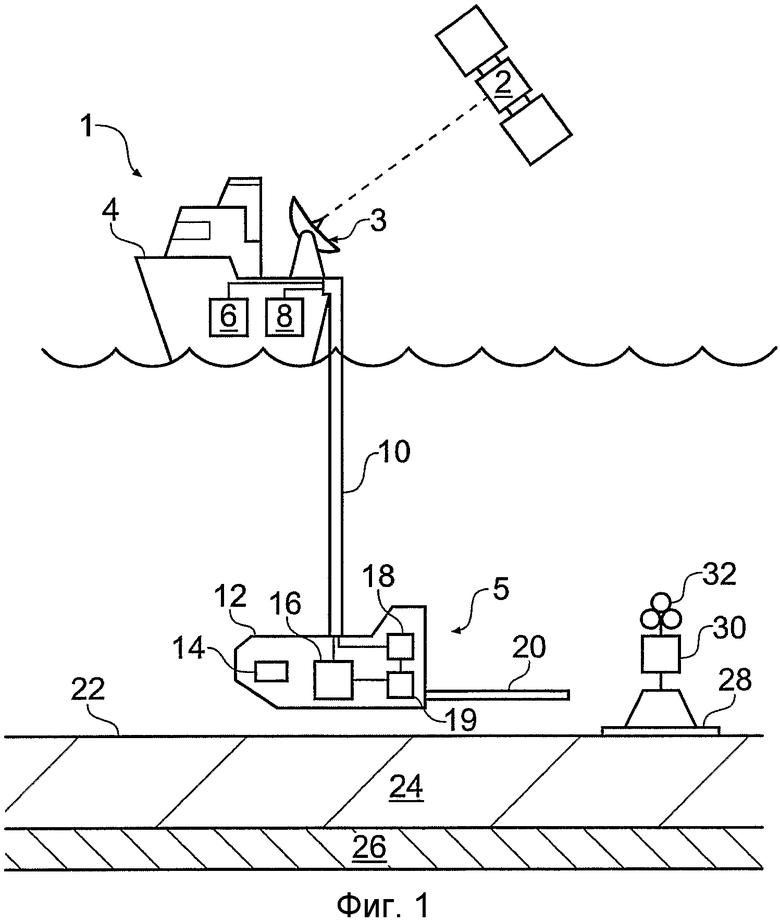
| СРЕДСТВО ДЛЯ ТРАНСПОРТИРОВКИ ЖИДКИХ ГРУЗОВ | 2008 |
|
RU2381137C1 |
| Генераторное устройство для морской геоэлектроразведки | 1978 |
|
SU909646A1 |
| Способ геоэлектроразведки и устройство для его осуществления | 1976 |
|
SU894650A1 |
| АВТОМОБИЛЬНЫЙ ИНТЕРФЕЙС | 2005 |
|
RU2390904C2 |

