Предлагаемое устройство относится к области наружного диагностического контроля технических параметров подземного трубопровода и уровня его коррозионной защищенности от влияния окружающей среды и может быть использовано при проведении комплексного обследования технического состояния подземного трубопровода в нефтегазовой отрасли, жилищно-коммунальном хозяйстве и других отраслях, где эксплуатируются подземные и подводные трубопроводы.
Известен способ бесконтактного выявления местоположения и характера дефектов металлических сооружений и устройство для его осуществления, который включает измерение над трубопроводом индукции магнитного поля в заданных точках в процессе перемещения векторов магнитного поля в прямоугольных координатах по крайней мере двумя трехкомпонентными датчиками, составление тензора градиентов магнитного поля, обработку полученной информации путем матричного преобразования, определение по результатам обработки фонового значения и отклонения от этого значения, по отличию которых на заданную критериальную величину от фонового значения, суждение о наличии и местоположении дефектов металлических трубопроводов и построение магнитограммы с указанием местоположения дефектов. Для реализации способа предлагается устройство, которое содержит систему датчиков регистрации магнитного поля, кварцевый генератор, делитель частоты, аналого-цифровой преобразователь, блок управления, блок порогового уровня, соединенный с блоком звуковой и световой индикации, автоматический индикатор разряда батарей, блок отображения информации, блок вычисления градиентов магнитного поля, блок ситуационных привязок и блок абсолютной географической привязки, сегмент запоминающегося устройства, блок выбора сегмента записи и блок управления записью, при этом блок управления соединен с блоком ситуационных привязок, блоком GPS, блоком выбора сегмента записи и блоком управления записью, соединенных с блоком вычисления градиентов магнитного поля, блок выбора сегмента записи соединен с сегментом запоминающего устройства, соединенного через блок вычисления градиентов магнитного поля с блоком отображения информации, соединенным с блоком порогового уровня и автоматическим индикатором разряда батарей, аналого-цифровой преобразователь соединен с блоком вычисления градиентов магнитного поля [1].
Недостатками данного способа и устройства по его реализации являются:
необходимость проведения трассировки местоположения проекции оси трубопровода на дневной поверхности и измерения глубин фактического заложения трубопровода, что влечет за собой использование дополнительных диагностических приборов и увеличение трудоемкости работ;
достоверность контроля находится в сильной зависимости от выбранного шага записи информации и точности определения расстояния от датчиков до трубопровода, а следовательно, и от негативного влияния «человеческого» фактора при выполнении измерений;
высокая трудоемкость процесса контроля, которая связана с необходимостью постоянного выбора расстояний между датчиками в зависимости от диаметра трубопровода и уточнения угловых местоположений дефектов, а также выбором шага измерения до 0,2 метра;
невысокая чувствительность датчиков - до 10-8 Тл и невысокая скорость оцифровки используемых АЦП;
отсутствие в устройстве технических решений, позволяющих выделить обследуемый трубопровод от соседнего трубопровода, расположенного в непосредственной близости;
невозможность проведение диагностического контроля трубопровода на технологической площадке с плотной сеткой расположения труб из-за высокой погрешности измерения и невозможности выделить обследуемый трубопровод из-за влияния магнитных помех соседних труб.
Известен способ и устройство диагностики технического состояния подземного трубопровода, который включает непрерывное измерение градиентов индукции постоянного магнитного поля по меньшей мере в восьми точках около трубного пространства при перемещении по меньшей мере трех линеек датчиков, причем две линейки датчиков располагаются вертикально, а одна горизонтально относительно поверхности Земли, каждая из линеек состоит из трех трехкомпонентных датчиков, математическую обработку измерений путем решения избыточной системы уравнений, составленной для градиентов индукции постоянного магнитного поля, определение пространственной траектории трубопровода на основе зависимости величин градиентов от глубины погружения трубопровода и от расстояния между линейкой датчиков и проекцией оси трубопровода, проведение выявления дефектов и их ранжирования на основе рассчитанных геометрических параметров и компонент магнитных моментов дефектов и градиентов моментов вдоль оси. Для реализации способа предлагается устройство, которое включает полевой компьютер, блок сбора данных и управления, три линейки магниторезистивных датчиков постоянного магнитного поля, причем две линейки расположены вертикально, а одна горизонтально относительно поверхности Земли, каждая из линеек состоит из трех трехкомпонентных датчиков, выходы которых соединены с входами соответствующих операционных усилителей каждой компоненты, тогда как выходы операционных усилителей связаны с входами соответствующих сигнализаторов перегрузок и генератором перемагничивания, причем выходы сигнализаторов перегрузок соединены с входами соответствующих аналого-цифровых преобразователей, выходы которых подсоединены к блоку сбора данных и управления [2].
Недостатками данного способа и устройства по его реализации являются:
требуется предварительная трассировка местоположения проекции трубопровода на землю с использованием трассопоисковых приборов, что приводит к увеличению трудоемкости процесса диагностического контроля и негативно отражается на точности привязки выявленных аномалий;
расчет градиентов магнитного поля и магнитных моментов, исходя из средней скорости перемещения оператора над трубопроводом, будет приводить к ошибкам в определении реальных величин магнитных моментов в условиях, когда оператор осуществляет диагностическое обследование в постоянно меняющихся трассовых условиях, например чередование участков трассы, заросших высокой травой или кустарником, и равнинной местностью, на которых скорость движения оператора сильно отличается;
невысокая достоверность диагностического контроля при расположении рядом соседних коммуникаций с током;
невозможность проводить диагностический контроль на технологических площадках, на которых имеется плотная сетка расположения трубопроводов с током, из-за высокой погрешности в измерениях.
отсутствие в устройстве технического решения по позиционированию магнитной антенны устройства над осью трубопровода;
отсутствие в устройстве технических решений, позволяющих выделить (различить) обследуемый трубопровод от соседних трубопроводов, расположенных в непосредственной близости от него - от двух метров и менее;
отсутствие в устройстве технических решений, обеспечивающих его работу в условиях влияния электромагнитных помех от электропроводных коммуникаций, а также от постоянных блуждающих токов в грунтах;
невысокая чувствительность и быстродействие применяемых датчиков магнитного поля, что ограничивает его применение при глубинах заложения трубопровода более двух метров из-за высокой погрешности диагностического контроля технических параметров подземного трубопровода.
Отсутствие в устройстве технических решений, устраняющих негативное влияние вышеуказанных факторов, приводит к снижению его заявленных точностных характеристик и делает устройство не работоспособным при работе на технологических площадках с плотной сеткой расположения трубопроводов из-за высокой погрешности диагностического контроля.
Наиболее близким к предлагаемому техническому решению является способ и устройство диагностики технического состояния подземного трубопровода [3].
Способ диагностики включает возбуждение в зоне трубопровода переменного магнитного и переменного электрического поля, измерение расстояния от датчиков до проекции оси трубопровода на дневную поверхность, индицирование величины и направления удаления датчиков от проекции оси трубопровода, на основании чего оператор корректирует путь перемещения вдоль трубопровода, а при диагностировании, идентификации и ранжировании аномалий внесение поправок в величины компонент поля и их разностей, связанных с расстоянием от датчиков до оси трубопровода, определение углов поворота датчиков поля вокруг горизонтальных и вертикальной оси, получение матрицы поправок и внесение их в матрицы компонент поля и их разностей, измерение индукции постоянного магнитного поля не менее чем в шести точках пространства над трубопроводом и не менее девяти разностей величин индукции постоянного магнитного поля в этих же точках, одновременно с индукцией постоянного магнитного поля проводят измерение не менее двух компонент вектора индукции переменного магнитного поля по крайней мере в трех точках пространства над трубопроводом, расположенных вдоль горизонтальной или вертикальной оси и совпадающих с точками измерения постоянного магнитного поля, и не менее двух компонент вектора напряженности переменного электрического поля, причем датчики постоянного магнитного поля, переменного магнитного поля и переменного электрического поля совмещены в одном конструктиве, проведение предварительной статистической обработки результатов измерений, выделение по совокупности признаков участки трубопровода для последующей обработки, определение расположения и магнитных моментов источников аномалий постоянного и переменного магнитных полей и параметры нарушений изоляции трубопровода и проведение по полученным данным идентификации и ранжирования особенностей технического состояния трубопровода. Устройство диагностики содержит узел датчиков постоянного магнитного поля и узел датчиков переменного магнитного поля, соединенные в объединенный узел датчиков магнитного поля, блок сбора данных и управления (БСДУ), блок преобразователей-акселерометров, блок возбуждения (генератор) электромагнитного поля. Узел датчиков постоянного магнитного поля содержит устройства определения разности значений индукции постоянного магнитного поля, которые соединены с многовходовыми аналого-цифровыми преобразователями (АЦП), соединенные в свою очередь с микроконтроллерами. Микроконтроллеры соединены с адаптерами интерфейса, адаптерами преобразователей из одного интерфейса в другой, разветвителем HUB USB и далее с контроллером БСДУ. Индукционные датчики узла переменного магнитного поля соединены с избирательными переключаемыми усилителями, многоканальным АЦП и через разветвитель с контроллером БСДУ. Блок электрометрической диагностики состоит из воздушной и стелющейся антенн, переключающихся на частоты 100 и 625 Гц избирательных усилителей, соединенных с многоканальным АЦП, соединенным через разветвитель HUB USB с контроллером БСДУ. БСДУ через адаптер USB и микроконтроллер управляет работой автоматических аттенюатеров избирательных усилителей. Бесконтактные антенны за счет их распределенной емкости преобразуют напряженности электрического поля в электрические сигналы. БСДУ состоит из соединенных между собой контроллера, энергонезависимой памяти, клавиатуры и индикатора. Контроллер через USB-порт соединен с персональным компьютером и GPS. Блок возбуждения электромагнитного поля состоит из генератора, согласующего устройства, используемого при возбуждении поля рамкой, и заземляющей электрической линии, один из концов которой соединен с трубопроводом, а другой - с заземленным электродом или емкостным заземлителем. Звуковая индикация прохождения оператором над проекцией оси трубопровода на земную поверхность производится с помощью детектора, преобразователя напряжение-частота и головных телефонов.
Недостатками способа и устройства по его реализации являются:
высокая погрешность диагностического контроля при расположении рядом соседних коммуникаций с током;
невозможность проведения диагностического контроля на технологических площадках с плотной сеткой расположения трубопроводов с током из-за высокой погрешности в измерениях;
сложная для эксплуатации и технического обслуживания конструкция магнитной антенны устройства, которая перегружена избыточным количеством датчиков и связанных с ними устройствами, что делает устройство трудоемким в производстве, при эксплуатации и ремонте;
отсутствие в устройстве технических решений, позволяющих выделить (различить) обследуемый трубопровод от соседних трубопроводов, расположенных в непосредственной близости от него - от двух метров и менее;
невысокая скорость оцифровки применяемых АЦП;
невысокое быстродействие феррозондовых датчиков.
Устройство не работоспособно при работе на технологических площадках с плотной сеткой расположения трубопроводов из-за высокой погрешности диагностического контроля.
Задачей изобретения является повышение достоверности и точности диагностического контроля при проведении комплексного обследования технических параметров подземного трубопровода в независимости от условий его расположения: в техническом коридоре или на технологической площадке, где имеется плотная сетка трубопроводов с током.
Это достигается за счет того, что в способе диагностики технических параметров подземного трубопровода, включающем возбуждение переменного магнитного поля в зоне трубопровода, измерение над и вблизи трубопровода индукции переменного магнитного поля, создаваемой током в трубопроводе, и одновременно с индукцией переменного магнитного поля измеряют три компоненты вектора индукции постоянного магнитного поля над трубопроводом в точках, совпадающих с точками измерения переменного магнитного поля, измерение расстояния от датчиков до проекции оси трубопровода на дневную поверхность, индицирование величины и направления удаления датчиков от проекции оси трубопровода, на основании чего оператор корректирует путь перемещения вдоль трубопровода, определение углов поворота датчиков поля вокруг горизонтальных и вертикальной осей трубопровода, получение матрицы поправок, связанных с углами поворота датчиков и их расстоянием относительно оси трубопровода, внесение поправок в матрицы компонент поля и их разностей, обработку результатов измерений и определение расположения аномалий постоянного и переменного магнитного поля, магнитные моменты и параметры нарушения изоляционного покрытия трубопровода, отличающийся тем, используют два генератора переменного тока, - основной и вспомогательный, - подключенных на концах обследуемого участка трубопровода и включенных навстречу друг другу, содержащих GPS, причем основной генератор работает непрерывно, а вспомогательный генератор - в импульсном асинхронном режиме, составляющем не более 20% от времени работы основного генератора, в режиме работы обоих генераторов обеспечивается выделение обследуемого трубопровода из числа трубопроводов, расположенных в непосредственной близости от него, а также позиционирование оператора над обследуемым трубопроводом, в режиме отключения вспомогательного генератора осуществляется диагностический контроль технических параметров подземного трубопровода.
А также за счет того, что основной генератор с помощью GPS, содержащейся в его составе, задает базовую ФЧХ переменного тока, подаваемого в трубопровод, время подачи генератором тока с установленной базовой ФЧХ в трубопровод и время регистрации этого тока БСДУ синхронизируется с помощью GPS, расположенных в БСДУ и генераторе, что позволяет выделить обследуемый трубопровод из числа трубопроводов, расположенных в непосредственной близости по фазово-частотной характеристике тока и исключить из рассмотрения при диагностическом контроле технических параметров трубопровода токи в трубопроводе, имеющие отличительные от базового значения ФЧХ.
Это достигается также за счет того, что устройство диагностики технических параметров подземного трубопровода, включающее узел датчиков постоянного магнитного поля, соединенных с буферными усилителями, соединенными, в свою очередь, с АЦП и микроконтроллером, узел датчиков переменного магнитного поля, соединенных с предусилителями, буферными усилителями, АЦП и микроконтроллером, соединенные в модуль датчиков магнитного поля, блок сбора данных и управления, состоящий из соединенных между собой двух микроконтроллеров, энергонезависимой памяти, GPS модуль, порт USB, через который микроконтроллер соединяется с персональным компьютером и системой спутниковой навигации GPS, блок преобразователей-акселерометров, отличается тем, что содержит блок возбуждения и синхронизации, состоящий из двух генераторов - основного и вспомогательного, микроконтроллера, встроенного во вспомогательный генератор, и GPS модулей, встроенных в основной и вспомогательный генераторы.
Дополнительным отличием устройства является то, что основной генератор содержит GPS, задающую базовую фазово-частотную характеристику рабочего тока основного генератора.
Сущность предлагаемого технического решения поясняется следующими фигурами.
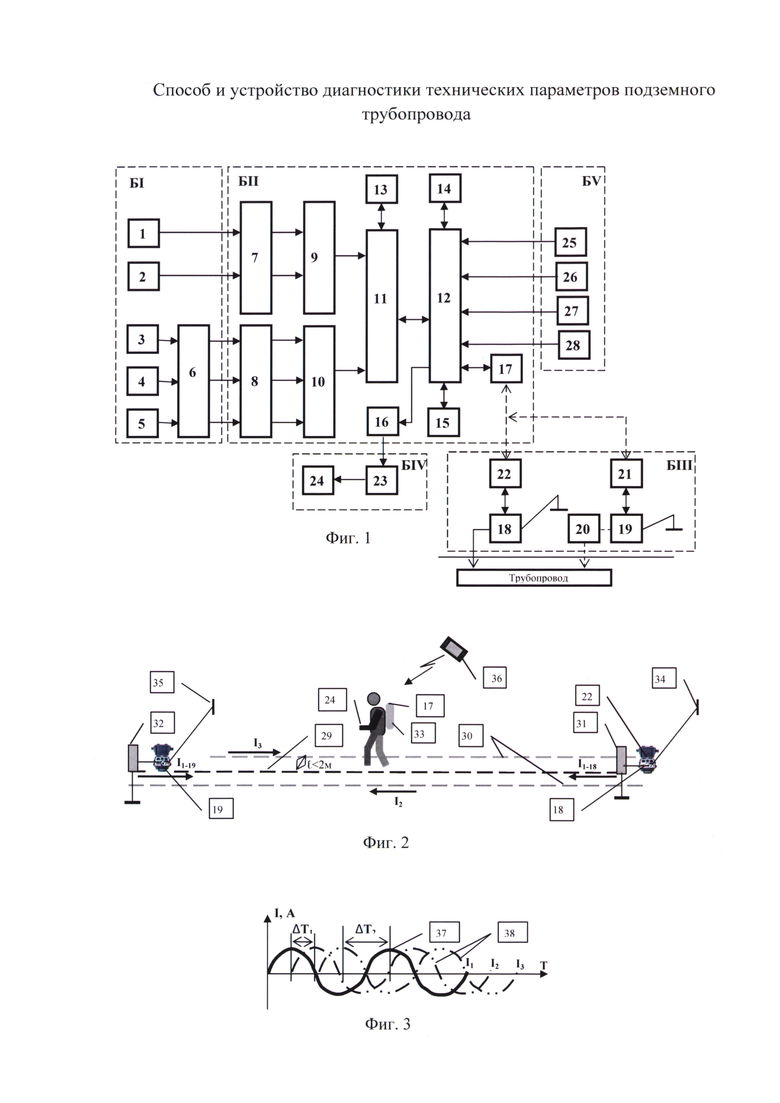
На фиг. 1 представлена блок-схема устройства диагностики технических параметров подземного трубопровода, где
БI - Блок датчик датчиков магнитного поля, содержащий:
1, 2 - трехкомпонентные магниторезистивные датчики,
3-5 - двухкомпонентные индукционные датчики,
6 - предусилители;
БII - Блок сбора данных и управления, содержащий:
7, 8 - буферные усилители,
9, 10 - высокоскоростные АЦП,
11, 12 - микроконтроллеры,
13, 14 - оперативная память,
15 - LSD дисплей,
16 - SD карта,
17 - GPS;
БIII - Блок возбуждения и синхронизации электромагнитного поля, содержащий:
18 - основной генератор,
19 - вспомогательный генератор,
20 – микроконтроллер,
21, 22 – GPS;
BIV - Блок индикации и отображения, содержащий:
23 - USB контроллер,
24 - персональный компьютер;
BV - Блок периферийных устройств, содержащий:
25 – радиодальномер,
26 – трекер,
27 - Bluetooth модуль,
28 - датчик температуры.
На фиг. 2 представлен пример применения устройства при работе на технологической площадке, где
29, 30 - проекции трубопроводов на земной поверхности,
31, 32 - внешние объекты обследуемого трубопровода,
33 – устройство,
18, 19 - генераторы блока возбуждения и синхронизации электромагнитного поля (БIII),
17 - GPS БСДУ устройства (БII),
22 - GPS блока возбуждения и синхронизации электромагнитного поля (БIII),
34, 35 - места подключения и заземления генератора соответственно,
36 – спутник.
На фиг. 3 представлен пример фазово-частотных характеристик токов в трубопроводах 1 и 2 (фиг. 3), где
37 - фазово-частотная характеристика рабочего тока генератора в диагностируемом трубопроводе,
38 - фазово-частотные характеристики рабочего тока генератора в соседних трубопроводах.
Устройство, фиг. 1, работает следующим образом. Блок возбуждения и синхронизации электромагнитного поля БIII подключается к диагностируемому трубопроводу следующим образом: основной генератор 18 подключается к внешнему объекту трубопровода, от которого проводится диагностический контроль, а вспомогательный генератор 19 - к его внешнему объекту, расположенному на другом конце участка обследуемого трубопровода. С помощью GPS 22 задается базовая фазово-частотная характеристика (ФЧХ) рабочего тока генератора 18, который подается в диагностируемый трубопровод. Время подачи в трубопровод рабочего тока и время его регистрации БСДУ (блок БII) синхронизируется по времени GPS 17 и 22. Вспомогательный генератор 19 с помощью микроконтроллера 20 работает в асинхронном импульсном режиме, составляющем 20% от времени работы основного генератора, создавая ток навстречу току от генератора 18. Блок датчиков магнитного поля устройства БI перемещается над диагностируемым трубопроводом. Данные с БI поступают в БСДУ (БII), в котором сигналы с датчиков усиливаются буферными усилителями 7 и 8, с помощью АЦП 9 и 10 преобразуются в цифровой код. Далее сигналы в цифровом коде поступают в микроконтроллер 11, где происходит их обработка по заданной программе. В микроконтроллер 12 БСДУ поступают также сигналы от блока преобразователей - акселерометров БV для учета поправок, связанных с угловыми отклонениями датчиков магнитного поля и GPS. Данные о трубопроводе накапливаются и хранятся в энергонезависимой памяти 13 и 14 устройства. Управление устройством и блоком возбуждения и синхронизации рабочего тока БIII осуществляется с помощью персонального компьютера 24, соединенного с БСДУ (БII) через USB контроллер 23.
Сущность изобретения сводится к реализации возможности измерения технических параметров обследуемого подземного трубопровода в условиях, когда он расположен в техническом коридоре или на технологической площадке, где имеется плотная сетка с расстояниями менее 3-х метров размещения вокруг него трубопроводов с током.
Пример приведен для случая применения устройства при выполнении диагностического контроля технических параметров подземного нефтепромыслового трубопровода (НПТ). Сложность обследования состоит в том, что НПТ содержит внешние объекты, например крановые узлы (КУ), которые расположены на концах его отдельных участков. Эти крановые узлы имеют заземление. При подключении генератора устройства к крановому узлу большая часть тока через заземление КУ уходит к заземляющему электроду генератора, а в трубопровод направляется не более 20…30% от величины рабочего тока. Рабочий ток на крановом узле также перераспределяется между трубопроводами, подходящими к КУ, что резко снижает величину рабочего тока в обследуемом НПТ. Дополнительной сложностью является наличие в непосредственной близости до одного метра других трубопроводов, включая выведенных из эксплуатации, что создает помехи при выделении обследуемого трубопровода.
На фиг. 2 представлен пример диагностического контроля технических параметров подземного трубопровода, который состоит в следующем:
генераторы 18 и 19 блока возбуждения и синхронизации БIII устройства подключаются к внешним объектам 31 и 32, расположенным на обоих концах диагностируемого трубопровода 29, при этом временные параметры работы генераторов и БСДУ устройства синхронизируются по времени с помощью GPS 17, 21 и 22 (фиг. 1) через спутник 36 (фиг. 2);
включаются режимы работы генераторов таким образом: основной генератор 18 с помощью GPS 22 (фиг. 1) подает в трубопровод рабочий ток с определенной базовой фазово-частотной характеристикой. Вспомогательный генератор 19 работает в асинхронном импульсном режиме, составляющего не более 20% от времени работы генератора 18, создавая движение своего тока навстречу току от генератора 18.
оператор с устройством 33 на спине перемещается в пешем порядке от внешнего объекта 31 к объекту 32, позиционируя свое положение относительно проекции оси обследуемого трубопровода 29 на поверхности земли по интерфейсу персонального компьютера 24 устройства;
в период работы обоих генераторов 18 и 19 обеспечивается выделение обследуемого трубопровода на фоне помех от соседних трубопроводов за счет создания большой суммарной величины тока в обследуемом трубопроводе 29 от работы генераторов 18 и 19: Iz=I1-18+I1-19, превосходящего по величине токи генераторов I2 и I3, протекающие по соседним трубопроводам, а также позиционирование оператора над осью трубопровода;
в период работы генератора 18 при отключенном генераторе 19 осуществляется диагностический контроль технических параметров обследуемого трубопровода; в процессе контроля технических параметров трубопровода 29 осуществляется синхронизация по времени с помощью GPS 17 и 22 ФЧХ тока, подаваемого основным генератором 18 в трубопровод и регистрируемого БСДУ, при этом токи, имеющие отличительную от базовой ФЧХ, исключаются из рассмотрения - это второй признак распознавания диагностируемого трубопровода от соседних трубопроводов.
На фиг. 3 представлен пример выделения рабочего тока I1 обследуемого трубопровода от токов, протекающих по расположенным в непосредственной близости соседним трубопроводам 30, где в качестве отличительного признака является сдвиг по фазе токов I2 и I3 на величину ΔT1 и ΔТ2 соответственно.
Предлагаемые способ и устройство диагностики технических параметров подземного трубопровода позволяют реализовать в полном объеме, с высокой точностью и достоверностью возможности наружного метода контроля трубопроводов, расположенных в сложных трассовых условий или на технологической площадке, где присутствуют другие коммуникации с током (трубопроводы, электрические кабели) на расстояниях менее двух метров, за счет реализуемых технических решений по выделению обследуемого трубопровода на фоне электромагнитных помех и исключению из рассмотрения токов, попадающих в него по неконтролируемым электрическим каналам.
Источники информации
1. Патент RU №2264617 C2. Заявка №2001113748/28, 23.05.2001, приоритет от 10.06.2003 г.
2. Патент RU №2510500 C1. Заявка №2012140681/28, 23.09.2012, приоритет от 12.09.2012 г., опубликован 27.03. 2014 г.
3. Патент РФ №PU 2453760 C2. Заявка №2009148562/06, 18.12.2009, приоритет от 18.12.2009 г., опубликован 20.06. 2012 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения длины подземного трубопровода | 2017 |
|
RU2662246C1 |
| Способ определения пространственного положения трубопровода на участке подводного перехода | 2021 |
|
RU2786847C2 |
| Способ определения координат планово-высотного положения оси подземного трубопровода | 2020 |
|
RU2743605C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2024 |
|
RU2837559C1 |
| Способ диагностики технических параметров подземного трубопровода | 2020 |
|
RU2735349C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2024 |
|
RU2824417C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2022 |
|
RU2789039C1 |
| Способ обнаружения несанкционированных врезок в подземный трубопровод | 2020 |
|
RU2741177C1 |
| Способ диагностики технического состояния подземных трубопроводов | 2016 |
|
RU2630856C1 |
| СПОСОБ ДИАГНОСТИЧЕСКОГО КОНТРОЛЯ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2016 |
|
RU2633018C2 |
Группа изобретений относится к области наружного диагностического контроля технических параметров подземного трубопровода и уровня его коррозионной защищенности от влияния окружающей среды. Сущность изобретений сводится к реализации возможности проведения диагностического контроля технических параметров подземного трубопровода при наличии в непосредственной близости - менее 2-х метров - соседних трубопроводов с током. При проведении диагностического контроля технических параметров подземного трубопровода основной генератор с помощью GPS подает в трубопровод рабочий ток, имеющий установленную базовую ФЧХ, а вспомогательный генератор с помощью микроконтроллера работает в импульсном асинхронном режиме, составляющем не более 20% от времени работы основного генератора. Время подачи основным генератором рабочего тока в трубопровод и время регистрации этого тока БСДУ синхронизируется с помощью GPS, расположенных в БСДУ и генераторе. Выделение обследуемого трубопровода на фоне помех от соседних трубопроводов осуществляется в режиме работы обоих генераторов за счет создания в трубопроводе большого суммарного тока, а также исключением из рассмотрения токов, имеющих отличительные от базового значения ФЧХ. Диагностический контроль технических параметров подземного трубопровода осуществляется в режиме отключения вспомогательного генератора. Технический результат – повышение достоверности и точности диагностического контроля при проведении комплексного обследования технических параметров подземного трубопровода. 2 н. и 2 з.п. ф-лы, 3 ил.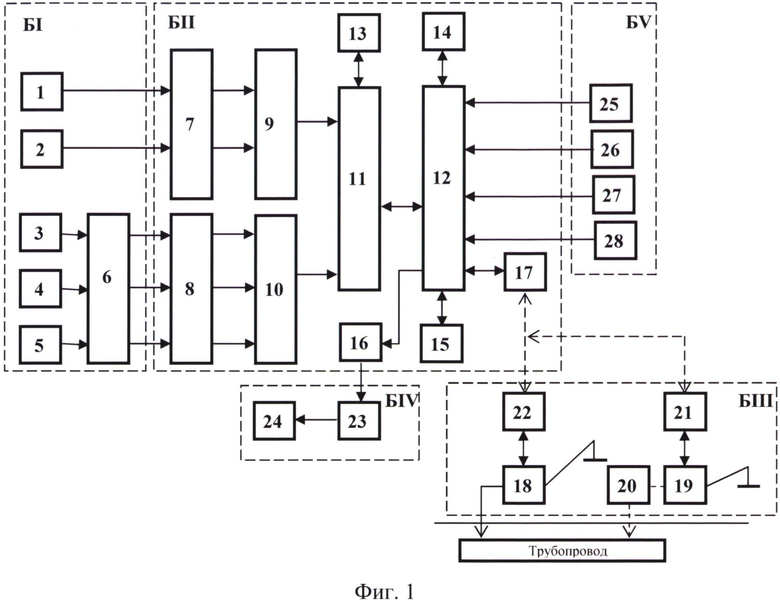
1. Способ диагностики технических параметров подземного трубопровода, включающий возбуждение переменного магнитного поля в зоне трубопровода, измерение над и вблизи трубопровода индукции переменного магнитного поля, создаваемой током в трубопроводе, и одновременно с индукцией переменного магнитного поля измеряют три компоненты вектора индукции постоянного магнитного поля над трубопроводом в точках, совпадающих с точками измерения переменного магнитного поля, измерение расстояния от датчиков до проекции оси трубопровода на дневную поверхность, индицирование величины и направления удаления датчиков от проекции оси трубопровода, на основании чего оператор корректирует путь перемещения вдоль трубопровода, определение углов поворота датчиков поля вокруг горизонтальных и вертикальной осей трубопровода, получение матрицы поправок, связанных с углами поворота датчиков и их расстоянием относительно оси трубопровода, внесение поправок в матрицы компонент поля и их разностей, обработку результатов измерений и определение расположения аномалий постоянного и переменного магнитного поля, магнитные моменты и параметры нарушения изоляционного покрытия трубопровода, отличающийся тем, используют два генератора переменного тока, - основной и вспомогательный, - подключенных на концах обследуемого участка трубопровода и включенных навстречу друг другу, содержащих GPS, причем основной генератор работает непрерывно, а вспомогательный генератор - в импульсном асинхронном режиме, составляющем не более 20% от времени работы основного генератора, в режиме работы обоих генераторов обеспечивается выделение обследуемого трубопровода из числа трубопроводов, расположенных в непосредственной близости от него, и позиционирование оператора над обследуемым трубопроводом, в режиме отключения вспомогательного генератора осуществляется диагностический контроль технических параметров подземного трубопровода.
2. Способ по п. 1, отличающийся тем, что основной генератор с помощью GPS, содержащейся в его составе, задает базовую ФЧХ переменного тока, подаваемого в трубопровод, время подачи генератором тока с установленной базовой ФЧХ в трубопровод и время регистрации этого тока БСДУ синхронизируется с помощью GPS, расположенных в БСДУ и генераторе, что позволяет выделить обследуемый трубопровод из числа трубопроводов, расположенных в непосредственной близости по фазово-частотной характеристике тока и исключить из рассмотрения при диагностическом контроле технических параметров трубопровода токи в трубопроводе, имеющие отличительные от базового значения ФЧХ.
3. Устройство диагностики технических параметров подземного трубопровода, включающее узел датчиков постоянного магнитного поля, соединенных с буферными усилителями, соединенными, в свою очередь, с АЦП и микроконтроллером, узел датчиков переменного магнитного поля, соединенных с предусилителями, буферными усилителями, АЦП и микроконтроллером, соединенные в модуль датчиков магнитного поля, блок сбора данных и управления, состоящий из соединенных между собой двух микроконтроллеров, энергонезависимой памяти, GPS модуль, порт USB, через который микроконтроллер соединяется с персональным компьютером и системой спутниковой навигации GPS, блок преобразователей-акселерометров, отличающееся тем, что содержит блок возбуждения и синхронизации, состоящий из двух генераторов - основного и вспомогательного, микроконтроллера, встроенного во вспомогательный генератор, GPS модулей, встроенных в основной и вспомогательный генераторы.
4. Устройство по п. 3, отличающееся тем, что основной генератор содержит GPS, задающую базовую фазово-частотную характеристику рабочего тока основного генератора.
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ (ВАРИАНТЫ) | 2009 |
|
RU2453760C2 |
| WO 2016054345 A1, 07.04.2016 | |||
| 0 |
|
SU160147A1 | |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ В ТРУБОПРОВОДАХ | 2008 |
|
RU2362159C1 |
| 0 |
|
SU88453A1 | |

