Изобретение относится к области астрономо-геодезических измерений и может быть использовано для определения азимутальных направлений на земные ориентиры для решения практических задач навигации и баллистики. Предлагаемый способ относится к азимутальным способам измерения горизонтальных направлений.
Прототипом предлагаемого способа является метод определения азимута светила, включающий наблюдение положения светила в горизонтальной системе координат и регистрацию момента прохождения его через вертикал или альмукантарат, расчет азимута направления, заданного оптической осью телескопа, по формуле ctg A=sin ϕ ctg t-cos ϕ tg δ csc t, где t=Т+u-α - часовой угол, ϕ - широта места наблюдателя, δ - склонение звезды, Т - момент прохождения звезды через ось телескопа по часам места установки телескопа, u - поправка к местным часам, α - прямое восхождение светила, при этом значения параметров «ϕ, u» известны на момент измерения, а значения α и δ - находят из каталога звезд [Подобед В.В., Нестеров В.В. Общая астрометрия. - М.: Наука. Главная редакция физико-математической литературы, 1982. - 576 с.].
К недостаткам метода следует отнести зависимость погрешности измерения от нелинейности поля зрения телескопа, ошибок коллимации и наклонности оси телескопа, низкий темп измерения, связанный с моментом пересечения звездой вертикала или альмукантараты [То же, стр.104 и 260].
Темп измерения может быть существенно повышен при использовании многосекционного приемника [Патент России 2120108 С1, 10.10.98. Бюл. №28]. Однако вышеперечисленные ошибки в измерении азимута при этом не исключаются за счет осреднения результатов наблюдения. Повышение точности измерения за счет организации осей поворота телескопа для увеличения темпа измерений приводит к необходимости прецизионного измерения углов поворота, а наличие вращающихся опор вызывает появление дополнительных нестабильностей в положении оптической оси телескопа. Ошибки коллимации могут быть исключены путем создания технологического оборудования, позволяющего проводить измерение ее до выполнения измерений азимута. Однако это усложняет процесс измерения и требует дополнительных затрат.
Таким образом, вышеперечисленные погрешности в известных методах определения азимута появляются вследствие того, что при измерении времени пересечения звездой оптической оси телескопа опираются на положение в пространстве оптической оси телескопа, а при использовании фотоприемника все измерения выполняют относительно точки фотоприемника, в которую проектируется оптическая ось телескопа. Это обстоятельство приводит к ошибкам, связанным с нелинейностью поля зрения телескопа, ошибок коллимации и наклонности оси телескопа.
Задачей настоящего изобретения является повешение точности измерения азимута по результатам астрономических наблюдений звезд.
Поставленная задача решается так, что при измерении азимута все действия опираются на направление, задаваемое вертикальной плоскостью, проходящей между двумя изображениями одной и той же звезды, получаемые в телескопе дополнительными действиями. Для этого делят световой поток от звезды до входа в телескоп на два потока и направляют оба потока в телескоп. Первый поток и второй поток в вертикальной плоскости параллельны друг другу и наклонены на одинаковый угол к падающему потоку, а в горизонтальной плоскости первый поток наклонен к направлению падения света от звезды. Второй поток параллелен падающему свету от звезды, но противоположно ей направлен. Указанное деление в горизонтальной плоскости достигается за счет одного отражения первого потока и двух отражений второго потока. При этом в вертикальной плоскости оба потока отражаются один раз. Попадая в телескоп, первый и второй потоки образуют два изображения одной и той же звезды, симметрично расположенные относительно вертикальной плоскости, проходящей через перпендикуляр к плоскости первого отражаттеля. При движении звезды два ее изображения перемещаются в поле зрения телескопа симметрично относительно указанной плоскости, а момент пересечения ее звездой определяют путем многократной регистрации времени измерения положения в поле зрения телескопа одного изображения звезды и временного отстояния от него другого, симметричного изображения той же звезды, деления полученной величины пополам и прибавления результата деления к моменту времени измерения положения первого изображения звезды при нахождении звезды с одной стороны вертикальной плоскости, проходящей через перпендикуляр к зеркальной поверхности первого отражателя, и вычитании результата деления из момента времени измерения положения первого изображения звезды при нахождении звезды с противоположной стороны указанной выше плоскости. В предложенном способе при измерениях времени прохождения звезды опираются на положение вертикальной плоскости, проходящей через перпендикуляр к зеркальной поверхности первого отражателя, являющейся принципиально линейным элементом по отношению к падающему потоку по всей своей поверхности. При этом телескоп и фотоприемник являются «ноль-индикаторами» и их вышеперечисленные погрешности, вносимые в процесс измерения, вычитаются.
Момент пересечения звездой указанной выше вертикальной плоскости определяют путем регистрации времени измерения положения в поле зрения телескопа первого изображения звезды Т1i временного отстояния второго изображения звезды от первого ΔT1=(TX2i-ТX1i), деления полученной величины пополам и прибавления результата деления к зафиксированному моменту времени измерения положения первого изображения звезды, то есть Тi=TX1i±(TX2i-ТX1i)/2. Здесь знак «+» принимается для положения звезды справа от оси визирования, когда TX2i-ТX1i>0. Знак «-» принимается для положения звезды слева от оси визирования, когда Tx2i-Тx1i<0. В тексте выше обозначено: ТX1i - i-й момент измерения положения первого изображения звезды на оси Х фотоприемника, параллельной плоскости горизонта. Аналогично для второго изображения той же звезды TX2i - i-й момент измерения положения второго изображения звезды на оси Х фотоприемника, параллельной плоскости горизонта. Далее вычисление азимута производится также, как и в известных способах, по формуле ctg A=sin ϕ ctg t-cos ϕ tg δ csc t, где t=Тi+u-α - часовой угол, ϕ - широта места наблюдателя, δ - склонение звезды, Тi - момент прохождения звезды вертикальную плоскость, проходящую через перпендикуляр к зеркальной поверхности первого отражателя по часам места установки телескопа, u - поправка к местным часам, α - прямое восхождение светила, при этом значения параметров ϕ, u известны на момент измерения, а значения α и δ - находят из каталога звезд. Описанная выше процедура измерения и вычисления повторяется «n» раз за время нахождения звезды в поле зрения матричного фотоприемника и определяется среднее значение азимута.
В качестве аналога принят телескоп, расположенный на вертикально-азимутальной монтировке [Бакулин П.И., Кононович Э.В., Мороз В.В. Курс общей астрономии: Учебник. - М.: Москва. Главная редакция физико-математической литературы, 1983. - 560 с.]. Одна из осей его направлена в зенит, а другая лежит в горизонтальной плоскости. Монтировка позволяет навести ось телескопа в любую точку небесной полусферы и зафиксировать момент прохождения звезды через вертикальную плоскость, проходящую через ось телескопа. Регистрация момента пересечения может производиться вручную или автоматически, за счет фоторегистратора, установленного в фокусе телескопа. При измерении опираются на положение трех осей: двух осей монтировки и оптической оси телескопа, что приводит к описанным выше погрешностям измерения азимута.
В качестве прототипа средства измерения азимута из астрономических наблюдений принят универсальный инструмент АУ 2"/1" [Подобед В.В., Нестеров В.В. Общая астрометрия. - М.: Наука. Главная редакция физико-математической литературы, 1982. - 576 с.]. Он состоит из астрономической трубы (телескопа), имеющей возможность поворачиваться вокруг двух взаимно перпендикулярных осей - горизонтальной и вертикальной. Установка осей в плоскость математического горизонта и в вертикальной плоскости производится с помощью уровней и регулировочных винтов. Недостатком аналога является участие в измерении непосредственно глаз оператора и, как следствие, низкая точность однократного измерения, низкий темп измерения. Наличие двух осей поворота и измерительных шкал с микроскопами требует проведения перед каждым измерением нивелировки инструмента и его поверки. В идеальном случае вертикальная ось универсала должна быть установлена вертикально, горизонтальная ось ей перпендикулярна, а визирная линия трубы в свою очередь перпендикулярна горизонтальной оси. Вследствие ошибок установок (неточности нивелировки инструмента и юстировки отдельных его узлов) это условие не выдерживается и появляются три основные погрешности инструмента: наклон вертикальной оси в плоскости визирования, наклон горизонтальной оси к плоскости горизонта и коллимация визирной линии. Таким образом, универсальность прототипа, проявляющаяся в возможности наблюдения звезд в любой точке звездной полусферы, и измерения не только азимутов, но и высот светил, приводит к появлению как минимум двух осей поворота, с отсчетными элементами углов поворота каждой оси, что приводит к невысокой точности измерения азимута. Как и в аналоге, при измерениях азимута светила опираются на положение в пространстве трех осей: вертикальной оси, оси, расположенной в плоскости горизонта, и оптической оси телескопа, что порождает ошибки, описанные выше. Для передачи измеренного астрономического азимута потребителю труба универсала наводится на потребителя. При этом в автоколлимационном режиме визируется универсалом либо зеркало, либо геодезический знак, находящийся на достаточном удалении от универсала, либо непосредственно визируется труба инструмента потребителя (например, теодолит) в режиме сетка-сетка). При передаче возникает ошибка за счет погрешности отсчета угла разворота телескопа универсала.
Предлагаемое устройство для реализации способа (далее - астровизир) поясняется на фиг.1 и 2. На фиг.1 обозначено:
1 - телескоп,
2 - многосекционный фотоприемник,
3 - блок обработки видеоизображения,
4 - блок измерения точного времени,
5 - контроллер,
6 - электронный каталог звезд,
7 - блок горизонтирования,
8 - оптический блок,
9 - подложка,
10, 11 - зеркальные элементы,
12 - антенна для сигналов точного времени,
13 - звезда,
А - азимут - угол между проекцией перпендикуляра к зеркальным поверхностям элемента 10 или 11 оптического блока 8 на горизонтальную плоскость и направлением на юг,
S - направление на юг,
γу - угол наклона перпендикуляра к зеркальным поверхностям элементов 10 или 11 относительно горизонта в вертикальной плоскости, проходящей через перпендикуляр к зеркальной поверхности элементов 10 или 11,
γХ - угол наклона относительно горизонта плоскости, перпендикулярной вертикальной плоскости, проходящей через перпендикуляр к зеркальной поверхности элементов 10 или 11.
Согласно фиг.1 свет от звезды 13 через оптический блок 8 поступает на вход телескопа 1, в фокусе которого помещен многосекционный фотоприемник 2. При этом часть света от звезды 13 поступает на вход телескопа через элемент 10, а часть света - через элемент 11 оптического блока 8. Оба элемента расположены на единой подложке 9, которая жестко соединена с блоком горизонтирования 7 и имеет наклон к плоскости горизонта. Телескоп расположен так, что его оптическая ось расположена в той же плоскости, что и перпендикуляр к зеркальной поверхности первого элемента 10 оптического блока 8 или ей параллельной, и имеет наклон в этой плоскости к указанному перпендикуляру. Выход фотоприемника 2 соединен с первым входом блока измерения точного времени 4 через блок обработки видеоизображения 3. Второй вход блока измерения точного времени 4 через антенну 12 подключен к службе точного времени. Выход блока измерения точного времени 4 подключен к контроллеру 5, два входа которого подключены к электронному каталогу звезд 6. На два остальных входа блока измерения точного времени 4 заводятся данные о широте места и поправка к местным часам. Выход блока измерения точного времени 4 подключен к потребителю. Телескоп 1 установлен так, что перпендикуляр к зеркальной поверхности, например элемента 10 или 11, и оптическая ось телескопа лежат в одной плоскости или в параллельных плоскостях.
Астровизир работает следующим образом. Свет от звезды 13 поступает на вход оптического блока 8, в котором свет от звезды 13 отражается элементами 10 и 11 в направлении телескопа 1. Причем один из элементов 10 отражает свет как плоское зеркало, а второй 11 - как призма с углом при вершине, равным 90°. В этом случае в одном направлении элемент 11 отражает свет как плоское зеркало, а в перпендикулярном направлении как уголковый отражатель. Относительно плоскости, проходящей через перпендикуляр к зеркальной поверхности элемента 10, оба потока разойдутся под одинаковым углом и образуют в фокальной плоскости телескопа 1 два изображения. Угол расхождения зависит от положения звезды относительно направления перпендикуляра к зеркальной поверхности элемента 10. Причем в горизонтальной плоскости они отклонятся в разные стороны от плоскости, проходящей через ось телескопа и перпендикуляр к зеркальной поверхности элемента 10, а в вертикальной плоскости углы наклонов пуков относительно горизонта имеют один знак. На фиг.2 изображено поле матричного преемника 15, изображение звезды 14 при ее движении из положения 1 в положение 5. X - ось многосекционного фотоприемника 2, параллельная плоскости горизонта, У - ось фотоприемника 2, перпендикулярная плоскости горизонта. Каждому из изображений Х1, Х2, Х3, Х4, Х5 симметрично от оси У будут соответствовать изображения X11, X21, X31, X41, X51. В кульминации изображения Х5 и X51 совпадают. При этом симметричные изображения равно отстоят от оси У. При вхождении звезды 13 в поле зрения матричного преемника 15 появляется изображение звезды 14 (положение Х1). В этот момент блок обработки видеоизображения 3 вырабатывает сигнал начала первого измерения TX1 и определяет по временной шкале отстояние симметричного изображения звезды в положении X11-TX2. Оба сигнала начала и конца измерения поступают в блок измерения точного времени 4 на первый его вход, а на второй его вход через антенну 12 поступают сигналы точного времени Т, с помощью которых начало и конец измерения положения звезды в положении X1 привязываются к точному времени. Далее точное время, соответствующее началу и концу измерения положения звезды 14, поступает в контроллер 5, где определяется ΔT1=(TX1-TX2)/2 и T1=TX1+ΔT1, либо
ΔT1=TX2-ΔT1.
После проведения указанной процедуры измерения ctg A вычисляется по формуле
ctg A=sin ϕ ctg t-cos ϕ tg δ csc t,
где t=Ti+u-α - часовой угол,
ϕ - широта места наблюдателя,
δ - склонение звезды,
Тi - i-й момент «пересечения» звездой вертикальной плоскости, проходящей через перпендикуляр к зеркальной поверхности первого отражателя, u - поправка к местным часам, α - прямое восхождение светила, при этом значения ϕ, u известны на момент измерения и введены в контроллер 5, а значения α и δ - находят из электронного каталога звезд 6.
В момент измерения блок горизонтирования 7 обеспечивает отсчет γу от горизонта, а γХ удерживает у нуля. В случае наличия дополнительных наклонов перпендикуляра к зеркальной поверхности элементов 10 и 11 относительно горизонта измеренные значения ΔγУ и Δ γХ вводятся в контроллер 5 и по известным зависимостям определяются поправки в измеренный азимут. Описанная выше процедура измерения и вычисления повторяется «n» раз за время нахождения звезды в поле зрения многосекционного фотоприемника и определяется среднее значение азимута перпендикуляра к зеркальным поверхностям элементов 10 и 11 оптического блока 8.
Схематически прохождение звезды по полю многосекционного приемника показано на фиг.2, где обозначено: 14 - изображение звезды в поле многосекционного приемника 15. При движении звезды она последовательно занимает положение с X1 по Х5, ее второе изображение в каждом из этих положений обозначены цифрами с индексом внизу; 16 - место проекции оптической оси телескопа в поле многосекционного приемника 2; Х, У - горизонтальная и, соответственно, вертикальная оси многосекционного фотоприемника. Когда звезда пройдет точку кульминации (пересечение звездой вертикальной оси ОУ или момент совпадения правого и левого изображения звезды (на рис.2 точка 5), правое и левое изображения звезды меняются местами. Число точек измерения положения обоих изображений звезды в поле зрения многосекционного приемника зависит от скорости прохождения звезды и быстродействия многосекционного приемника. На фиг.2 приведено для примера пять измерений в положениях, когда звезда находилась слева от оси ОУ, а ее второе изображение - справа. В приведенном примере может быть выполнено 10 измерений моментов пересечения звездой вертикальной оси ОУ.
В зависимых пунктах формулы изобретения приводятся различные варианты устройства оптического блока.
Так, в п.3 формулы для оптической передачи измеренного азимута потребителю предложено в оптический блок ввести дополнительно зеркало. Оно может быть параллельно зеркальной поверхности первого элемента или расположено под известным углом наклона к ней. Вместо зеркала может быть использован набор двугранных зеркальных отражателей, соединенных с блоком и имеющих угол при вершине, равный 90°. Линии соединения их параллельны горизонтальной плоскости. В этом случае потребитель может перенести к себе азимут, визируя в автоколлимационном режиме зеркало или набор двугранных зеркальных отражателей, соединенных с оптическим блоком. Причем во втором случае потребитель свободен от точной наводки своего визира на зеркало в вертикальной плоскости. Устройство по п.3 формулы работает следующим образом. После выполнения определения азимута по способу, описанному в п.1 формулы, астровизир определяет азимут направления перпендикуляра к зеркальной поверхности оптического блока, и его значение выдается потребителю с выхода контроллера 5 в виде конкретного значения угла, образованного проекцией перпендикуляра к зеркальной поверхности оптического блока на плоскость горизонта и направлением на юг. Однако для материализации этого угла потребителю требуется перенести это значение в свою систему координат, связанную с его средствами определения азимута, например гиротеодолитами или теодолитами. Для этого в устройстве введено дополнительное зеркало или набор двугранных зеркальных отражателей, соединенных с оптическим блоком. При этом в астровизире заранее измерен и паспортизован угол между горизонтальными проекциями перпендикуляров к зеркальному элементу оптического блока и соответственно к зеркальной поверхности дополнительного зеркала или набора двугранных зеркальных отражателей. Потребитель с помощью известного приема переносит азимут от зеркала астровизира к оптической оси визирования средства определения азимута потребителя. Для этого потребитель наводит свое средство на зеркало астровизира и в автоколлимационном режиме определяет азимутальное положение оптической оси своего средства измерения. При этом исключается ошибка передачи азимута, имеющаяся в аналоге ввиду отсутствия угла поворота в горизонтальной плоскости астровизира. Блок зеркальных отражателей позволяет не выставлять оптическую ось трубы потребительского инструмента перпендикулярно зеркальной поверхности первого элемента в вертикальной плоскости, что упрощает процедуру передачи азимута.
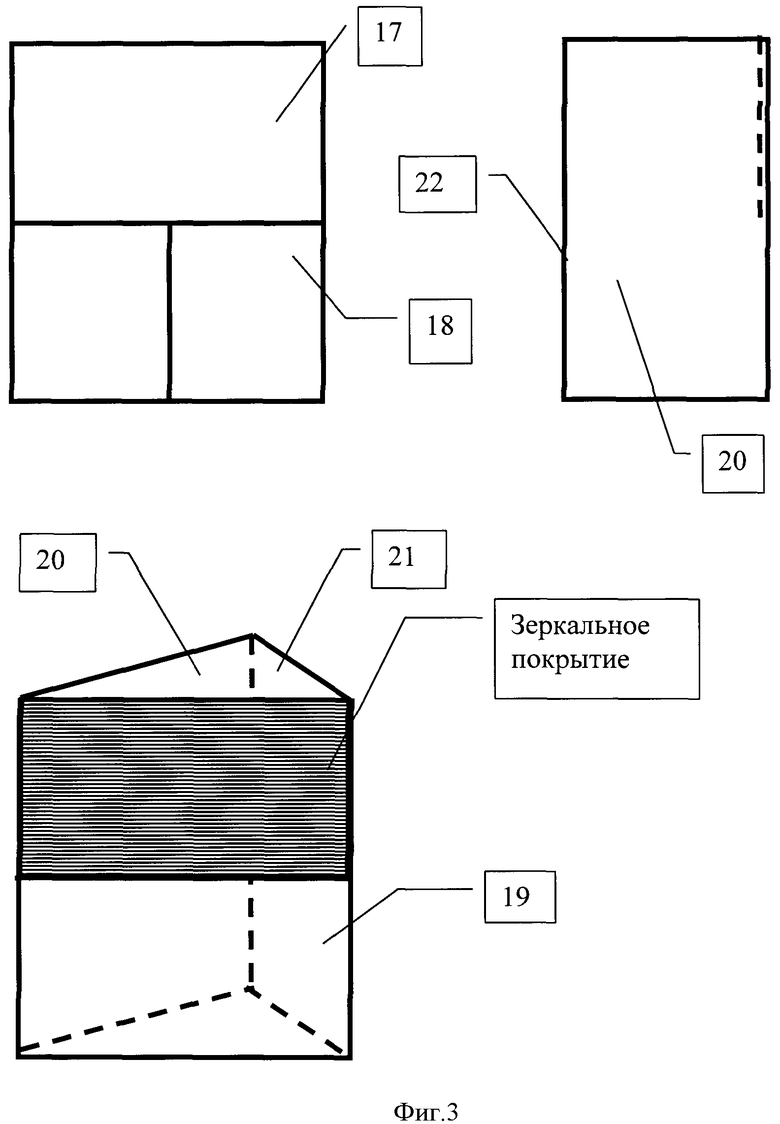
В п.4 формулы предложен наиболее технологичный вариант исполнения оптического блока. Для этого в устройстве по п.2 формулы в качестве оптического блока используется двугранная призма, у которой две боковые грани зеркальные и образуют двугранный угол 90°. Третья грань, расположенная против прямого угла, имеет зеркальное покрытие только на половине грани, а перпендикуляр к третьей грани призмы расположен в вертикальной плоскости, проходящей через ось телескопа, или ей параллелен и наклонен к плоскости горизонта на известный угол. Работа устройства поясняется на фиг.3. Свет от звезды 13 (фиг.1) поступает в оптический блок 8, в котором делится на две части призмой 19. Зеркальное покрытие 17 отражает единожды свет от звезды в направлении телескопа, а открытая часть призмы 18 дважды от боковых зеркальных граней 20 и 21. Первая половина света от звезды формирует в фокусе телескопа на поверхности фотоприемника изображение, например Х2, отстоящее по осям Х,У на фиг.2 на величины:
- ΔХ2 и + ΔУ2. Одновременно второе изображение X21 по тем же осям отстоит на величины + ΔХ2 и + ΔУ2. Далее работа устройства аналогично работе устройства по п.1. Две боковые зеркальные грани призмы могут выполнять функцию зеркала для передачи азимута потребителю аналогично зеркалу в п.3 формулы.
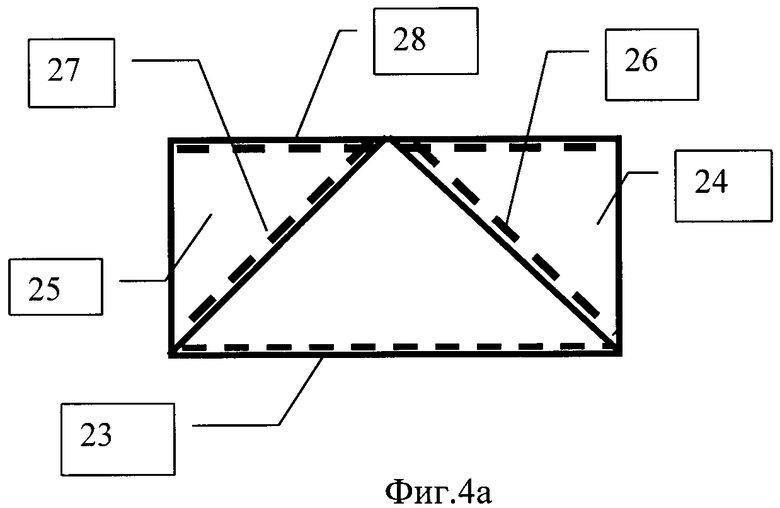
В п.5 формулы предложена конструкция оптического блока в виде сборки параллелепипеда с двумя трехгранными призмами. При этом первый элемент представляет собой зеркальную грань параллелепипеда, а второй элемент образован двумя трехгранными призмами с боковыми зеркальными гранями, при этом они механически соединены с параллелепипедом, так что две боковые грани призм образуют угол 90°, а биссектриса к образованному углу параллельна перпендикуляру к зеркальной грани параллелепипеда. Устройство блока пояснено на фиг.4, а на фиг.4а приведен вид на сборку сверху и обозначено: 23 - параллелепипед; 24, 25 - трехгранные призмы с зеркальными поверхностями 26 и 27. Через основание параллелепипеда 23 оптический блок 8 крепится к блоку горизонтирования 7. Оптический блок 8 работает аналогично оптическому блоку по п.4 формулы изобретения. Свет от звезды поступает в телескоп через оптический блок 8. При этом однократное отражение он испытывает от зеркальной грани параллелепипеда 23, а двукратное отражение от зеркальных граней 26 и 27 трехгранных призм 24, 25. Для передачи азимута потребителю у параллелепипеда делают вторую грань 28 тоже зеркальной.
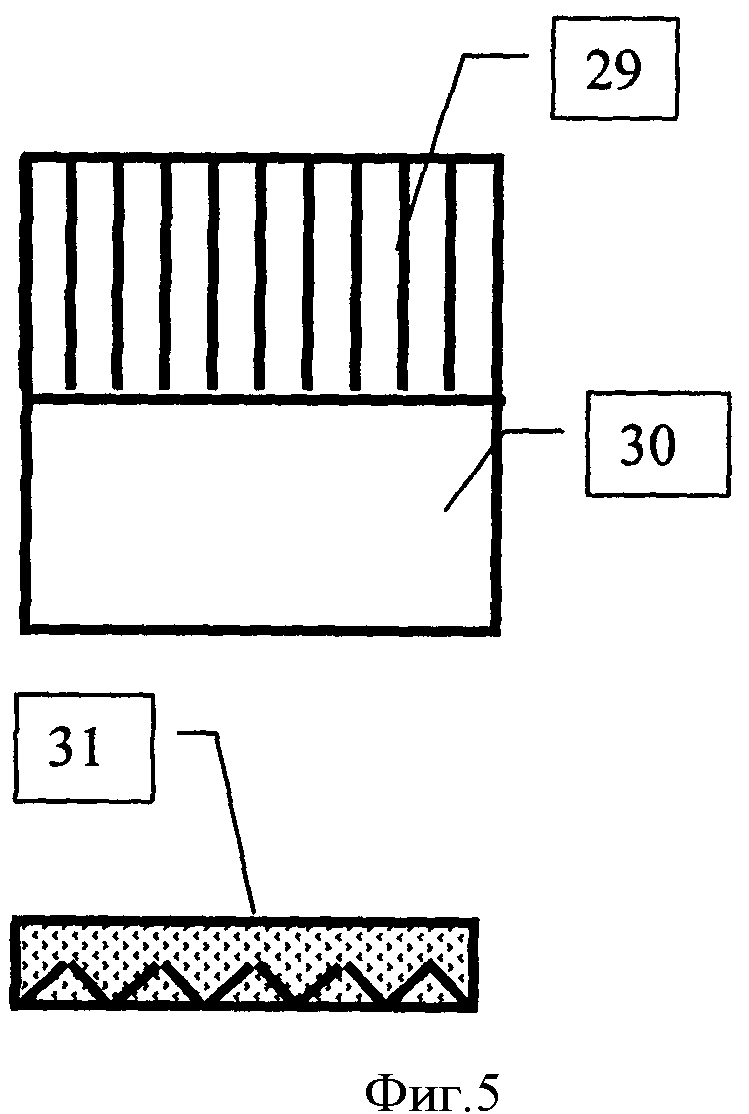
В п.6 формулы предложена конструкция оптического блока 8, в котором первый элемент оптического блока представляет собой зеркало, а второй элемент выполнен в виде набора двугранных зеркальных отражателей, соединенных с между собой и зеркалом и имеющих угол при вершине, равным 90°, а их линии соединения параллельны вертикальной плоскости, проходящей через перпендикуляр к зеркальной поверхности первого элемента. Конструкция поясняется на фиг.5-7, где обозначено: 29 - набор двугранных зеркальных отражателей; 30 - первое зеркало; 31 - второе зеркало, параллельное первому; 32 - элемент первого зеркала; 33 - зеркало, параллельное зеркальной поверхности элементов 32 первого зеркала; 34 - зеркальные грани двугранного угла с углом при вершине 90°; 35 - набор двугранных зеркальных отражателей, соединенных между собой и зеркалом и имеющих угол при вершине, равный 90°. Линии соединения их между собой перпендикулярны вертикальной плоскости, проходящей через перпендикуляр к зеркальной поверхности первого элемента.
Оптический блок на фиг.5 работает следующим образом. Свет от звезды направляется в телескоп через два отражателя 29 и 30. На отражателе 30 свет испытывает однократное отражение под углом к зеркальной поверхности. Причем в горизонтальной плоскости угол между проекцией перпендикуляра на плоскость горизонта и направлением отраженного света изменяется по мере движения звезды и меняет знак при пересечении вертикальной плоскости, проходящей через перпендикуляр к зеркальной поверхности первого элемента. На втором элементе 29 свет от звезды испытывает два отражения и в горизонтальной плоскости параллелен падающему потоку, но распространяется после отражения в противоположном направлении к нему. За счет наклона в вертикальной плоскости оптического элемента к направлению на звезду оба потока без винитирования попадают на вход телескопа, но под разными углами в горизонтальной плоскости и одним и тем же в вертикальной плоскости.
Оптический блок на фиг.6 работает аналогично блоку на фиг 5. Отличие в том, что первый элемент представляет собой набор зеркал 32, чередующихся с отражателями 34, расположенными под углом 90° друг к другу.
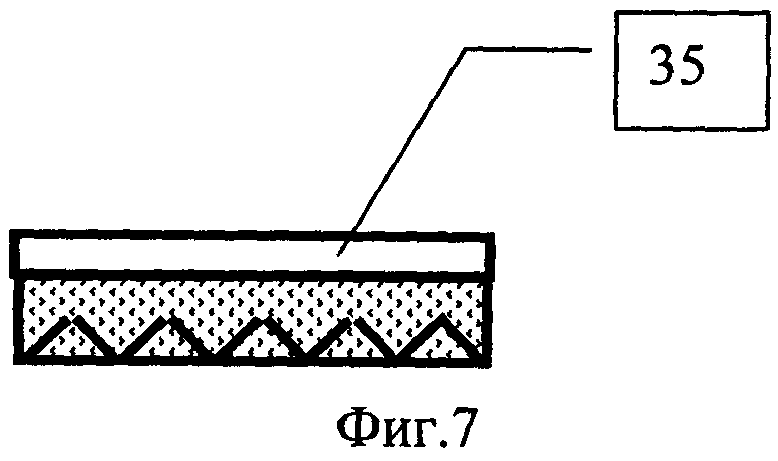
Оба варианта оптических элементов согласно п.7 формулы имеют с обратной стороны либо зеркало 31 или 33, либо набор зеркальных отражателей 35, у которых ребро при вершине двугранного угла параллельно горизонтальной плоскости. Указанные элементы оптического блока позволяют физически передать потребителю азимут перпендикуляра к зеркальной поверхности первого элемента.
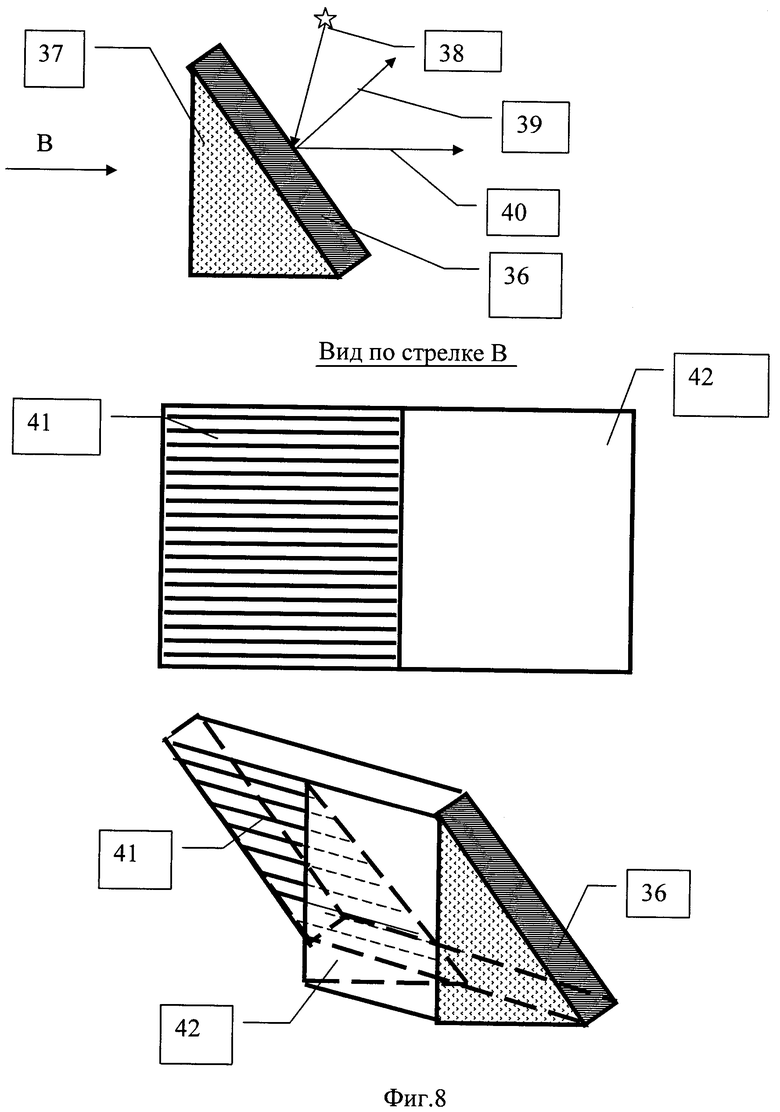
Возможны комбинация отражателей 31 или 33 с набором зеркальных отражателей 35 в одном оптическом блоке и аксонометрия такого оптического блока на фиг.8, где обозначено: 36 - первый или второй оптические элементы оптического блока; 37 - призма, жестко соединенная с оптическим блоком; 38 - звезда; 39 - направление перпендикуляра к зеркальной поверхности первого элемента; 40 - направление отражения света звезды в вертикальной плоскости на вход телескопа; 41 - набор двугранных зеркальных отражателей, соединенных с между собой и оптическим блоком и имеющих угол при вершине, равный 90°. Линии их соединения перпендикулярны вертикальной плоскости, проходящей через перпендикуляр к зеркальной поверхности первого элемента; 39 - зеркальная грань призмы с фиксированным углом наклона к зеркальной поверхности первого элемента. На аксонометрии обозначения элементов описаны выше.
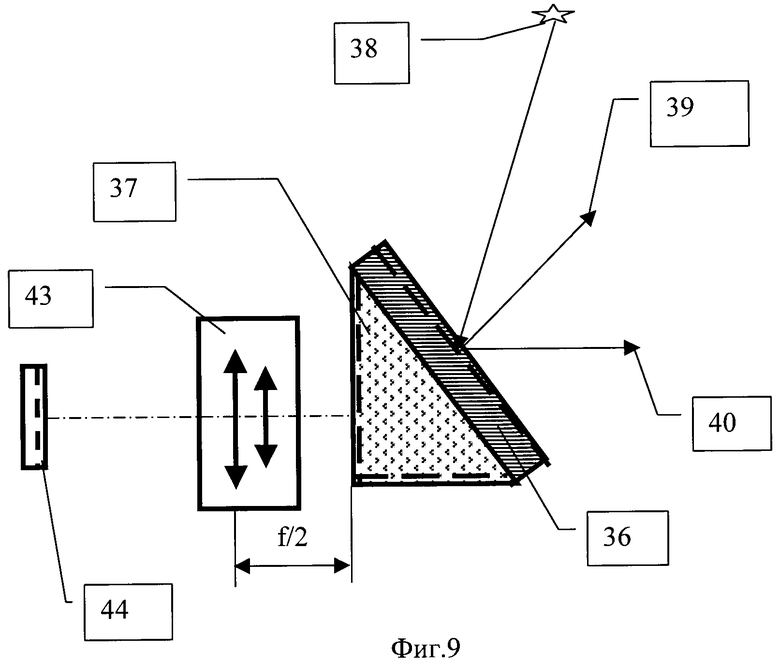
На фиг.9. показана схема передачи измеренного азимута потребителю, имеющего только базовое зеркало. На фиг.9 обозначены новые элементы: 43 - автоколлиматор; 44 - базовое зеркало потребителя. В этом случае в состав визира должен быть включен автоколлиматор. Удобнее всего использовать автоколлиматор, опирающийся на зеркальный отражатель 42. При этом автоколлиматор лучше всего установить на полуфокусном расстоянии от зеркального отражателя 42. Это создаст практически нерасстраиваемую схему передачи азимута потребителю.
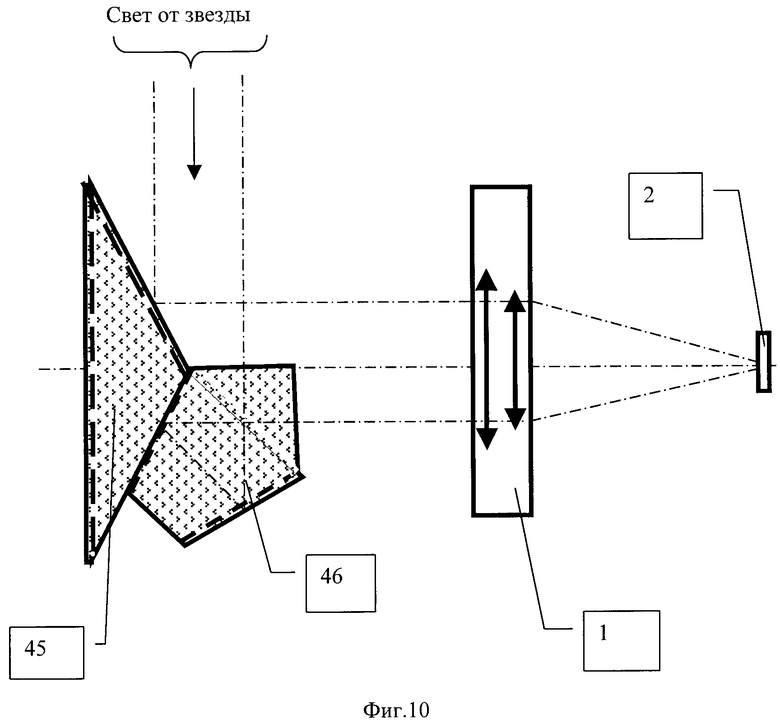
В п.8 формулы предложено устройство оптического блока, включающее трехгранную призму и пентапризму. Трехгранная призма имеет две зеркальные грани. Незеркальной гранью призма соединена с пентапризмой, с одной из ее непрозрачных граней. Угол, образованный зеркальной гранью трехгранной призмы и входной гранью призмы, - тупой. В этом случае первый элемент реализован одной из зеркальных граней призмы, которая направляет свет от звезды в телескоп, производя его однократное отражение. Второй элемент оптического блока реализован на пентопризме, в которой пучок отражается от ее боковых граней дважды и направляется в телескоп под прямым углом к падающему пучку. В момент пересечения звездой вертикальной плоскости, проходящей через перпендикуляры к входной грани пентапризмы и к зеркальной боковой грани призмы, поток от звезды должен быть перпендикулярен входной грани пентапризмы. Конструкция оптического блока по п.8 поясняется на фиг.10, где обозначены новые элементы: 45 - трехгранная призма с двумя зеркальными гранями; 46 - пентапризма. Свет от звезды поступает в оптический блок, образованный призмой 45 (первый элемент) и пентапризмой 46 (второй элемент), и делится им на две части. Первая часть отражается от зеркальной грани призмы, направляется в телескоп 1 и далее на фотоприемник 2. Вторая часть поступает на вход пентапризмы 46, отражается от ее двух внутренних граней, выходит под прямым углом к падающему пучку, направляется в телескоп 1 и далее на фотоприемник 2. При неперпендикулярном падении в поле зрения телескопа будут образовываться два изображения, которые сходятся и образуют одно изображение по мере приближения направления падения к перпендикулярному относительно передней грани пентапризмы.
Для расширения поля зрения визира в п.9 предложено установить вдоль горизонтальной оси несколько матричных фотоприемников. Алгоритмически они составляют единый массив фотоэлементов, расположенных на единой подложке.
Другое решение задачи по увеличению поля зрения предложено в п.10 формулы. В устройство дополнительно введены перед оптическим блоком два встречно вращающих оптических клина. В этом случае поле зрения астровизира может быть увеличено на оптическую толщину клина. Клинья имеют механизмы поворота и датчики угла поворота, которые соединены с контроллером. Точность от датчиков угла поворота требуется невысокая, но зависит от толщины клина. Увеличение поле зрения на 10° потребует измерения угла поворота с погрешностью 5'', чтобы погрешность в определении азимута не превышала 0,2''. Работает устройство следующим образом. В контроллере оператор исходя из выбранной звезды устанавливает определенный угол поворота клиньев, далее включает программу вращения клиньев, соответствующей перемещению выбранной звезды. В точках наблюдения звезды механизм отключается, измеряется азимутальное положение клиньев, заносится в контроллер измеренное значение угла поворота клина и соответствующий ему азимутальный угол, который далее учитывается при определении измеренного азимута.
Для защиты астровизира от внешней среды работа последнего происходит в помещении через защитное стекло. Для исключения ошибок, которые могут быть им внесены в результат измерения азимута, предложено защитное стекло снабдить механизмом поворота. В этом случае часть измерений в одной серии выполняется при одном положении защитного стекла, а другая часть - при его повороте на 180°. Это позволит вычесть ошибки, появляющиеся в ходе измерений, которые обусловлены наличием перед оптическим блоком защитного стекла. Механизм поворота соединен с контроллером и управляется автоматически по программе оператора.
Для расширения функциональных возможностей устройства предложено в п.12 формулы ввести механизм поворота астровизира (оптического блока совместно с телескопом) вокруг перпендикуляра к зеркальной поверхности первого элемента. Ось поворота снабжена механизмом поворота и датчиком угла поворота, которые подключены к контроллеру.
В п.12 формулы предложено угол поворота в устройстве по п.11 формулы установить 90°. В этом случае устройство будет выполнять измерения высоты звезды и по известным формульным зависимостям могут быть вычислены координаты места наблюдения: широта и долгота. В фокальной плоскости телескопа от одной и той же звезды будут сформированы два ее изображения, расположенные симметрично относительно плоскости горизонта. При движении звезды оба изображения будут двигаться навстречу друг другу и совместятся на горизонтальной оси, а при ее дальнейшем движении изображения опять разойдутся, но изображения поменяются местами.
Как показал проведенный заявителями информационный поиск, из уровня техники не известны способ и устройство для его реализации с перечисленной совокупностью существенных признаков, т.е. заявляемые способ и устройства обладают новизной и в сравнении с прототипом отличаются от него тем, что в способе измерения астрономического азимута из наблюдений звезд при измерении опираются не на оптическую ось телескопа и ее положение в пространстве, а на положение в пространстве перпендикуляра к плоскому отражателю, для чего свет от звезды направляют в телескоп после разделения его на два потока за счет однократного отражения первого потока и двукратного отражения второго потока. Определение момента пересечения звездой вертикальной плоскости, проходящей через перпендикуляр к зеркальной поверхности первого отражателя, производят путем многократного измерения времени и положения в поле зрения телескопа одного изображения звезды и временного отстояния от него другого, симметричного изображения той же звезды, деления полученной величины пополам, прибавления результата деления к моменту времени измерения положения первого изображения звезды при нахождении первого изображения звезды с одной стороны вертикальной плоскости и вычитания результата деления из момента времени измерения положения первого изображения звезды при нахождении звезды с противоположной стороны вертикальной плоскости.
Заявленное устройство отличается от прототипа тем, что перед телескопом дополнительно установлен оптический блок, реализующий деление потока от звезды на две части и направления его в телескоп. Причем первый поток направляется в телескоп после однократного отражения от зеркала, а второй после отражения на двух зеркалах, установленных под углом друг к другу. К горизонту в устройстве привязывается не ось телескопа, а перпендикуляр к первому отражателю. В зависимых пунктах описаны различные варианты оптического блока и устройства передачи азимута потребителю.
Заявленные способ и устройства с учетом зависимых пунктов формулы могут быть реализованы с применением современного оборудования и технологий и могут найти широкое применение в астрометрии, баллистике, геодезии при определении астрономических азимутов из астрономических наблюдений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО СТАБИЛИЗАЦИИ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ УКАЗАТЕЛЬНЫХ ОГНЕЙ СИСТЕМЫ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2007 |
|
RU2350517C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КУРСА ОБЪЕКТА | 2007 |
|
RU2347192C1 |
| КОММУТАТОР ОПТИЧЕСКИЙ МНОГОКАНАЛЬНЫЙ ДЛЯ ОПТИЧЕСКИХ ЛИНИЙ СВЯЗИ | 2003 |
|
RU2251131C2 |
| ОПТИЧЕСКАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ПАЛУБУ КОРАБЛЯ | 2006 |
|
RU2317233C1 |
| Устройство измерения высоты небесных светил | 2022 |
|
RU2794558C1 |
| ВИЗУАЛИЗАТОР ПЛОТНОСТНЫХ НЕОДНОРОДНОСТЕЙ СРЕДЫ | 2007 |
|
RU2344409C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАЛЫХ ПЕРЕМЕЩЕНИЙ | 1999 |
|
RU2165069C2 |
| УСТРОЙСТВО ДЛЯ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ПАРАМЕТРОВ ОРИЕНТАЦИИ ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО КОРАБЛЯ | 2016 |
|
RU2650730C1 |
| Устройство для измерения азимутального угла | 1986 |
|
SU1339241A2 |
| Устройство определения астрономического азимута | 2023 |
|
RU2800187C1 |



Предлагаемое изобретение относится к области астрономо-геодезических измерений и может быть использовано для определения азимутальных направлений на земные ориентиры для решения практических задач навигации и баллистики. Способ и устройство определения астрономического азимута предназначены для определения азимута из измерения времени пересечения звездой вертикальной плоскости, проходящей через перпендикуляр к первому отражателю. Астрономический азимут перпендикуляра определяется из вычислений с использованием известной формульной зависимости при известных широте, долготе места установки астровизира и часовом угле и склонении наблюдаемой звезды. Для увеличения точности измерения опираются на положение в пространстве перпендикуляра к зеркальной поверхности отражателя. Для этого входной поток от звезды в горизонтальной плоскости перед телескопом делят на два. Первый отражается от зеркальной поверхности и направляется в телескоп. Второй отражается дважды. В вертикальной плоскости оба потока одинаково наклонены к падающему потоку. В горизонтальной плоскости оба потока одинаково наклонены к перпендикуляру к зеркальной поверхности первого отражателя, но имеют противоположные знаки. В этом случае в фокусе телескопа образуются два изображения одной и той же звезды. При ее движении оба изображения сходятся к вертикальной плоскости, проходящей через перпендикуляр к зеркальной поверхности первого отражателя. Измерение времени производится многократно по взаимному положению двух изображений. В устройстве перед телескопом установлен оптический блок, состоящий из двух элементов. В вертикальной плоскости оба элемента выполняют функцию плоского зеркала, наклоненного в этой плоскости к направлению на звезду. В горизонтальной плоскости первый отражатель направляет поток от звезды в телескоп как плоское зеркало под двойным углом к падающему потоку. Второй элемент содержит два зеркала под углом 90° друг к другу. Отразившись дважды, свет от звезды будет распространяться в горизонтальной плоскости в направлении, противоположном направлению падения. В устройстве элемент горизонтирования определяет в моменты измерения времени пересечения звездой вертикальной плоскости, проходящей через перпендикуляр к зеркальной поверхности первого отражателя положение указанного перпендикуляра относительно горизонта. 2 н. и 10 з.п. ф-лы, 10 ил.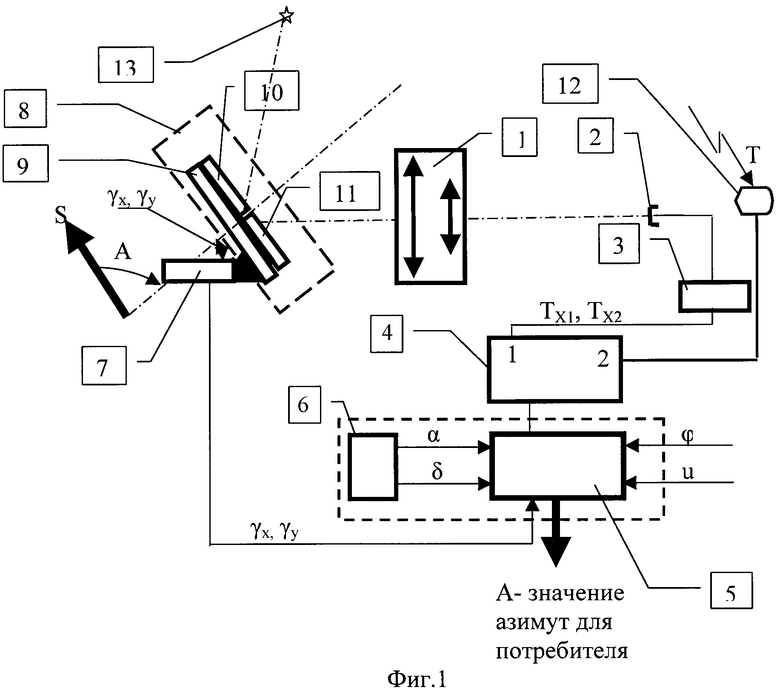
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОБЪЕКТА НА ФОНЕ ЗВЕЗД | 1986 |
|
RU2081437C1 |
| СИСТЕМА АСТРООРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1989 |
|
SU1795708A1 |
| ОПТИЧЕСКИЙ СОЛНЕЧНЫЙ ТЕЛЕСКОП | 2000 |
|
RU2158946C1 |
| SU 1165133 A1, 20.07.1999. | |||

