Изобретение относится к измерительным оптико-механическим устройствам астрономо-геодезического назначения и может быть использовано для высокоточного определения астрономического азимута заданного направления в целях эталонирования мобильных устройств, применяемых при решении навигационных задач.
Аналогом изобретения является аксиальный меридианный круг (Пинигин Г.И. Телескопы наземной оптической астрометрии // Учебное пособие. Николаев: Атолл, 2000, с. 64-76), который представляет собой меридианный инструмент с горизонтальной трубой, визирная ось которой расположена в первом вертикале. Объектив трубы жестко соединен с оптическим узлом в виде призмы (куба, эккера, зеркала). Отражающая (диагональная) поверхность оптического узла наклонена под углом 45° к визирной оси трубы. Для наблюдения звезды в меридиане труба вместе с оптическим узлом поворачивается в лагерах вокруг своей оси посредством механизма наведения, устанавливаясь по зенитному расстоянию таким образом, чтобы изображение звезды после отражения от диагональной поверхности оптического узла поступало в окулярный микрометр. Одновременно через полупрозрачный оптический узел или центральное отверстие в нем туда же передается и изображение световой марки неподвижного длиннофокусного коллиматора (миры). Измеряя в окулярном микрометре расстояние между изображениями звезды и миры, можно осуществлять постоянный контроль положения каждой звезды относительно горизонтального опорного направления, задаваемого длиннофокусным коллиматором. Аксиальный меридианный круг является астрометрическим инструментом и не предназначен для решения задач геодезической астрономии.
Прототипом предлагаемого изобретения является устройство определения астрономических координат (патент РФ № 2654932), в состав которого входят установленные на основании оптический блок с тремя жестко связанными между собой отражающими гранями, две из которых наклонные, одна - вертикальная, автоколлимационный блок, содержащий объектив, тест-объект и отсчетный узел, отражательный горизонт, оптически сопряженный с первой отражательной наклонной гранью оптического блока и с объективом, с которым, в свою очередь, сопряжена вторая отражательная наклонная грань, а третья грань установлена перпендикулярно оптической оси объектива. Оптический блок выполнен составным из двух жестко связанных базовыми гранями призм, одна из которых выполнена в виде призмы АР-90° и имеет опорную грань, обращенную в сторону отражательного горизонта, и базовую грань, обращенную в сторону объектива, вторая призма выполнена с углом α между отражающей и базовой гранями, найденным из условия
α=ϕ/2÷((ϕ-u)/2), где
ϕ - широта пункта наблюдения, в котором производят измерения, град;
u - угол поля зрения объектива.
В указанном устройстве производится определение в пункте наблюдения направления меридиана, как проекции на горизонтальную плоскость вертикальной плоскости, проходящей через зенит в точке наблюдения и полюс мира, то есть центр траектории движения близполюсной звезды (Полярной звезды для северного полушария).
Использование описанного устройства для определения астрономического азимута ограничивается нижеприведенными обстоятельствами. Инструментальная погрешность будет существенно увеличиваться в высоких широтах, так как высота близполюсной звезды примерно равна широте пункта наблюдения. Кроме того, возможность визирования близполюсной звезды обеспечивается углом между отражающей и базовой гранями второй призмы, поэтому для каждого пункта наблюдения, расположенного на новой широте, необходимо заново разрабатывать и изготавливать оптический блок. Также при обработке результатов наблюдения используется угловой масштаб изображения, зависящий от фокусного расстояния объектива и размера элемента разложения матричного фотоприемного устройства (далее - ФПУ), для определения которого необходима предварительная калибровка устройства.
Решаемая техническая проблема - совершенствование устройства, предназначенного для высокоточного определения астрономического азимута.
Достигаемый технический результат - повышение точности и оперативности определения астрономического азимута. Кроме того, обеспечивается унификация при использовании устройства на различных широтах.
Сущность предлагаемого изобретения заключается в том, что в устройстве определения астрономического азимута, содержащем вычислительное устройство; визир-автоколлиматор (далее - ВА), в состав которого входят осветитель, визирная марка, светоделительная призма-куб, объектив переноса марки, высокочувствительная телевизионная камера, синхронизированная с датчиком точного времени, и объектив, оптически сопряженный с блоком контрольного элемента (далее - БКЭ), на котором установлен двухосный датчик горизонта, для обеспечения одновременного контроля положений собственного и внешнего контрольных элементов и наблюдения множества звезд вблизи меридиана и альмукантарата с фиксированным значением высоты БКЭ выполнен из двух жесткосвязанных и имеющих соосные с оптической осью объектива центральные отверстия разного диаметра оптических элементов - визирной призмы, угол наклона которой инвариантен относительно широты места размещения, и двустороннего вертикального зеркала. Кроме того, дополнительно вводится объектив переноса марки, что обеспечивает контроль положения визирной оси устройства непосредственно в процессе наблюдения. Объектив переноса марки представляет собой склейку из двух линз и триппель-призмы.
Фиксированное значение высоты задается углом наклона к горизонту рабочей грани визирной призмы БКЭ.
Повышение точности обеспечивается за счет того, что при определении астрономического азимута по наблюдениям звезд вблизи альмукантарата с фиксированным значением высоты не происходит возрастания инструментальной погрешности при эксплуатации устройства в высоких широтах, а одновременное наблюдение множества звезд в кадре позволяет, во-первых, снизить погрешность снятия отсчетов, соответствующих положениям объектов, с матричного ФПУ, а, во-вторых, определить угловой масштаб изображения непосредственно в процессе наблюдения, то есть исключить влияние его изменения на итоговый результат.
Повышение оперативности обеспечивается как одновременным наблюдением в каждом кадре звезд и автоколлимационных откликов от собственного и внешнего контрольных элементов, так и оценкой углового масштаба изображения прямо в процессе наблюдения, а не посредством предварительной калибровки устройства.
Унификация достигается за счет того, что при наблюдении звезд вблизи альмукантарата с фиксированным значением высоты отсутствует необходимость разработки и изготовления БКЭ для каждого пункта наблюдения (размещения).
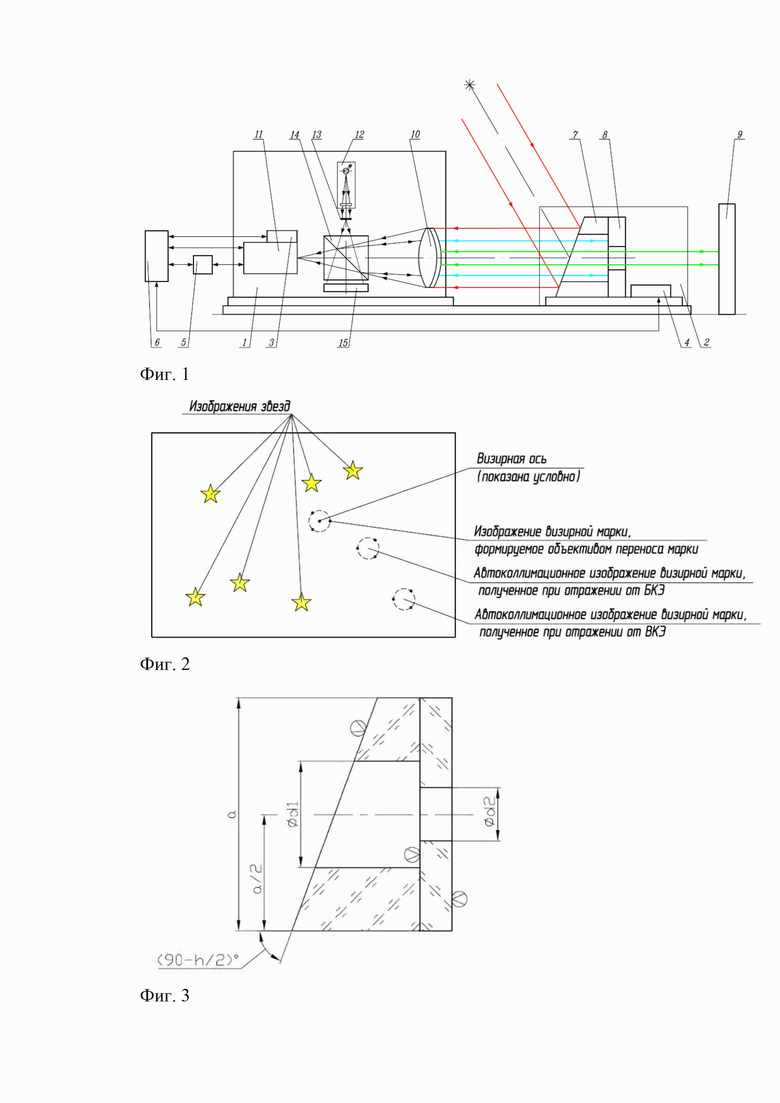
Предлагаемое устройство поясняется схемой оптической функциональной, приведенной на фиг. 1. На фиг. 2 показан вид поля зрения устройства. На фиг. 3 приведен чертеж БКЭ.
На рисунках приняты следующие обозначения:
1 - ВА;
2 - БКЭ;
3, 4 - двухосные датчики горизонта (далее - ДГ);
5 - датчик точного времени;
6 - вычислительное устройство;
7 - визирная призма БКЭ;
8 - двустороннее вертикальное зеркало БКЭ;
9 - внешний контрольный элемент (ВКЭ);
10 - объектив;
11 - высокочувствительная телевизионная камера;
12 - осветитель;
13 - визирная марка;
14 - светоделительная призма-куб;
15 - объектив переноса марки;
d1 - диаметр центрального отверстия визирной призмы БКЭ;
d2 - диаметр центрального отверстия вертикального зеркала БКЭ;
а - высота визирной призмы;
h - высота альмукантарата, вблизи которого производится наблюдение звезд.
Функционирование предлагаемого устройства осуществляется следующим образом.
При проведении наблюдений ВА 1 и БКЭ 2 устанавливаются на основании таким образом, чтобы визирная ось ВА находилась вблизи плоскости меридиана.
Формирование изображений звезд осуществляется следующим образом: световой поток от звездного неба при помощи рабочей грани визирной призмы БКЭ 7 (угол наклона к горизонту 90-h/2) направляется во входной зрачок объектива 10, который формирует изображение звездного неба на чувствительной площадке ФПУ, установленного в телевизионной камере 11.
Изображения визирной марки формируются следующим образом:
осветитель 12 освещает визирную марку 13, расположенную в фокальной плоскости объектива со светоделительной призмой-кубом 14;
объектив 10 формирует на выходе из ВА параллельный пучок, который, пройдя через центральное отверстие в визирной призме 7 БКЭ 2 и отразившись от внутренней поверхности вертикального зеркала 8 БКЭ, а также пройдя через центральные отверстия в визирной призме и вертикальном зеркале БКЭ и отразившись от ВКЭ 9, собирается объективом на чувствительной площадке ФПУ, формируя автоколлимационные изображения визирной марки, соответствующие направлениям нормалей к внутренней поверхности вертикального зеркала 8 БКЭ и к поверхности ВКЭ 9 (фиг. 2);
объектив переноса марки 15 формирует на чувствительной площадке ФПУ изображение визирной марки, соответствующее положению визирной оси ВА (фиг. 2).
В процессе наблюдений телевизионной камерой регистрируются кадры с привязкой к шкале точного времени, реализуемой посредством датчика точного времени 5. В каждом кадре формируются изображения звезд, наблюдаемых вблизи меридиана и альмукантарата с фиксированным значением высоты h, и три изображения визирной марки, одно из которых соответствует положению визирной оси, а второе и третье - положениям нормалей к внутренней поверхности вертикального зеркала 8 БКЭ и к поверхности ВКЭ 9 (фиг. 2).
Вертикальное зеркало является двусторонним и задает базовое направление, как для самого устройства, так и для внешних автоколлимационных угломерных устройств.
Положения БКЭ и телевизионной камеры относительно горизонта контролируются ДГ 4 и 3, установленными на БКЭ и телевизионной камере 11, соответственно.
Астрономические азимуты направлений исходящих нормалей к внутренней поверхности вертикального зеркала 8 БКЭ и к поверхности ВКЭ 9 определяются в вычислительном устройстве 6 как суммы азимута визирной оси и горизонтальных углов между визирной осью ВА 1 и направлениями нормалей к внутренней поверхности вертикального зеркала 8 БКЭ и к поверхности ВКЭ 9, соответственно.
Определение азимута визирной оси осуществляется вычислительным устройством следующим образом: по координатам энергетических центров зарегистрированных в кадре изображений объектов и информации звездного каталога производится идентификация звезд, в результате которой формируется массив сопоставленных координат звезд: определенных в плоскости ФПУ и экваториальных из каталога, по этому массиву производится определение параметров преобразования, с использованием которых вычисляется угловой масштаб изображения и осуществляется преобразование координат точки ФПУ, соответствующей положению визирной оси, в экваториальные координаты, а затем с учетом гринвичского звездного времени и астрономических координат пункта наблюдения в горизонтальные, то есть в азимут и высоту визирной оси.
Горизонтальные углы между визирной осью ВА и направлениями нормалей к БКЭ и ВКЭ определяются вычислительным устройством с учетом углового масштаба изображения по величине линейных смещений автоколлимационных изображений визирной марки, полученных при отражении от БКЭ и ВКЭ, относительно визирной оси ВА.
Итоговое значение астрономических азимутов производится по результатам многократных наблюдений.
Пример осуществления предлагаемого устройства.
Предлагаемое устройство было создано и экспериментально проверено на предприятии. Диаметры соосных с оптической осью объектива центральных отверстий: в визирной призме 25 мм, в двустороннем вертикальном зеркале 50 мм, выбраны исходя из необходимости обеспечения равенства яркостей автоколлимационных изображений визирной марки (значения диаметров могут быть выбраны другими, исходя из характеристик визира-автоколлиматора и условий наблюдения). Наблюдение звезд осуществлялось вблизи меридиана и круга равных высот h = 40° (выбор оптимальной высоты был произведен с учетом влияния инструментальных погрешностей и боковой рефракции), т.е. угол наклона к горизонту рабочей грани визирной призмы БКЭ стал инвариантным относительно широты места размещения и составил 70°. Также в устройстве были применены: 20-ти мегапиксельная КМОП-матрица в качестве ФПУ; объектив с относительным отверстием 1:7; датчик горизонта, позволяющий определять угол наклона относительно горизонта со средней квадратической погрешностью не более 0,2 угл. с.; приемник сигналов спутниковых навигационных систем в качестве датчика точного времени и вычислительное устройство для обработки данных.
В процессе наблюдений каждую секунду регистрировались кадры, содержащие изображения порядка 50 объектов, из них идентифицировались около 30 звезд. При обработке данных оценивался угловой масштаб изображения, который составил 2,169 угл. с. Средняя квадратическая погрешность определения астрономического азимута за время наблюдения не более 20 мин. не превысила 0,5 угл. с., что удовлетворяет требованиям, предъявляемым к точности эталонирования мобильных устройств, применяемых при решении навигационных задач.
Таким образом, заявленный технический результат достигнут.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ АСТРОНОМИЧЕСКИХ КООРДИНАТ ОБЪЕКТА | 2017 |
|
RU2654932C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ АСТРОНОМИЧЕСКОГО АЗИМУТА | 2007 |
|
RU2347252C1 |
| Угломерное устройство для наземного гирокомпаса | 1975 |
|
SU522413A1 |
| СИСТЕМА КОНТРОЛЯ УГЛОВЫХ ДЕФОРМАЦИЙ КРУПНОГАБАРИТНЫХ ПЛАТФОРМ | 2015 |
|
RU2609443C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АСТРОНОМИЧЕСКИХ КООРДИНАТ | 1990 |
|
RU2120108C1 |
| ТЕЛЕВИЗИОННО-ЛАЗЕРНЫЙ ВИЗИР-ДАЛЬНОМЕР | 2012 |
|
RU2515766C2 |
| СПОСОБ ПОСТРОЕНИЯ АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2016 |
|
RU2641515C2 |
| Устройство автоматической юстировки двухзеркальной телескопической системы с заданным направлением выходного излучения относительно направления визирования | 2023 |
|
RU2820599C1 |
| Способ определения астрономического азимута направления по наблюдениям звезды вблизи элонгации и устройство для его осуществления | 1989 |
|
SU1820210A1 |
| ВИЗИР-ДАЛЬНОМЕР | 2010 |
|
RU2444701C2 |
Изобретение относится к измерительным оптико-механическим устройствам астрономо-геодезического назначения и может быть использовано для высокоточного определения астрономического азимута заданного направления, необходимого для тестирования и настройки мобильных устройств, применяемых при решении навигационных задач. Устройство определения астрономического азимута содержит вычислительное устройство, визир-автоколлиматор, высокочувствительная телевизионная камера которого синхронизирована с датчиком точного времени, и оптически сопряженный с визиром-автоколлиматором блок-контрольного элемента с установленным на нем двухосным датчиком горизонта. При этом в составе визира-автоколлиматора применен объектив переноса марки, а блок-контрольного элемента выполнен из жесткосвязанных визирной призмы, угол наклона которой инвариантен относительно широты места размещения, и двустороннего вертикального зеркала, имеющих соосные с оптической осью объектива центральные отверстия разного диаметра. Технический результат - повышение точности и оперативности определения астрономического азимута, а также обеспечение унификации при использовании устройства на различных широтах. 3 ил.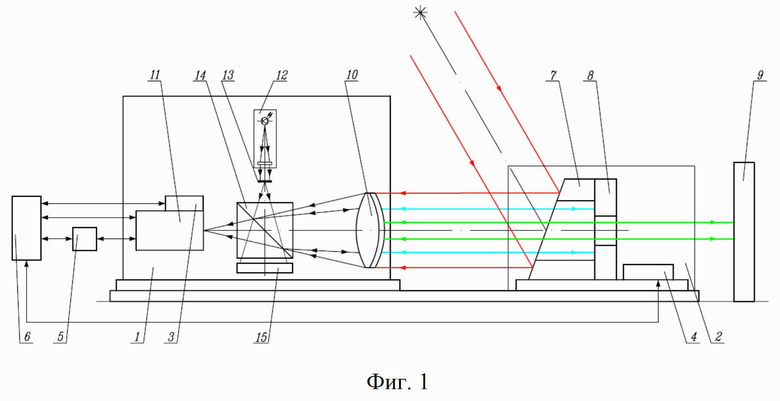
Устройство определения астрономического азимута, содержащее вычислительное устройство, визир-автоколлиматор, высокочувствительная телевизионная камера которого синхронизирована с датчиком точного времени, и оптически сопряженный с визиром-автоколлиматором блок-контрольного элемента с установленным на нем двухосным датчиком горизонта, отличающееся тем, что для обеспечения непосредственно в процессе наблюдения контроля положения визирной оси в составе визира-автоколлиматора применен объектив переноса марки, а для обеспечения одновременного контроля положений собственного и внешнего контрольных элементов и наблюдения множества звезд вблизи меридиана и альмукантарата с фиксированным значением высоты блок-контрольного элемента выполнен из жесткосвязанных визирной призмы, угол наклона которой инвариантен относительно широты места размещения, и двустороннего вертикального зеркала, имеющих соосные с оптической осью объектива центральные отверстия разного диаметра.
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ АСТРОНОМИЧЕСКИХ КООРДИНАТ ОБЪЕКТА | 2017 |
|
RU2654932C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АСТРОНОМИЧЕСКИХ КООРДИНАТ | 1990 |
|
RU2120108C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ АСТРОНОМИЧЕСКОГО АЗИМУТА | 2007 |
|
RU2347252C1 |
| Способ регенерирования сульфо-кислот, употребленных при гидролизе жиров | 1924 |
|
SU2021A1 |
| Способ регенерирования сульфо-кислот, употребленных при гидролизе жиров | 1924 |
|
SU2021A1 |
