Изобретение относится к измерительной технике и, в частности к средствам прецизионного определения курса объекта при контроле погрешности выработки курса системами навигации корабля при нахождении его у причала.
Известен метод определения курса объекта, при котором выставляют в плоскость горизонта объект и оптическое визирное устройство, а его оптическую ось выставляют параллельно диаметральной плоскости объекта, определяют методом взаимного пеленгования угловое положение оси визирного устройства относительно второго визирного устройства, азимутальное положение оптической оси которого известно. Второе визирное устройство также выставляют в плоскость горизонта. Затем вычисляют курс объекта - К по формуле К=А-П±180°, где А - азимут оптической оси второго визирного устройства при пеленговании первого визирного устройства, а П - угол между положениями оптической оси первого визирного устройства при визировании отметчиков диаметральной плоскости и второго визирного устройства. В устройстве, реализующем данный метод, обычно в качестве визирных устройств используются теодолиты. Оптическая ось второго теодолита выставлена в меридиан места. В этом случае по шкале горизонтального круга второго теодолита измеряются азимутальные углы визируемых с его помощью направлений. Недостатком указанного метода и устройств на его основе является то, что, как правило, отметчики диаметральной плоскости корабля (ДП) располагаются внутри объекта и не доступны для наблюдения первым теодолитом, установленным на верхней палубе. В некоторых случаях, во время постройки объекта, выносят на верхнюю палубу дополнительные отметчики ДП и определяют отклонение от параллельности плоскостей, проходящих через отметчики ДП, установленные внутри объекта, и дополнительные отметчики ДП, установленные на верхней палубе корабля. При определении курса объекта используются верхние отметчики ДП с учетом измеренной величины отклонения от параллельности плоскостей, указанных выше [В.В.Васильев, В.Н.Нарвер, В.Д.Приходько, О.А.Соколов «Особенности контроля погрешности выработки курса навигационного комплекса подводной лодки на швартовных испытаниях», «Гироскопия и навигация», №1 (52), 2006].
При высокоточных измерениях курса объекта с предельной погрешностью, не превышающей 5-7", ошибка, возникающая от нестабильности взаимного положения отметчиков ДП на верхней палубе и внутри корпуса объекта не позволяет использовать данную методику и устройства на ее основе. Поворот оси теодолита, установленного на верхней палубе, вызванный локальной деформацией скручивания места установки теодолита, также вносит погрешность в измерение курса объекта.
Возможно использование гиротеодолита для определения курса объекта при использовании отметчиков ДП, установленных внутри его корпуса. В этом случае курс объекта определяется прямым методом, измеряя гиротеодолитом азимут вертикальной плоскости, проходящей через нижние отметчики ДП. Однако время измерения гиротеодолитом направления на север составляет десятки минут. Поэтому даже при незначительном рыскании объекта появляется погрешность измерения азимута направления, заданного отметчиками ДП внутри объекта, превышающая допустимую величину. Кроме этого качка объекта в течение цикла измерения гиротеодолитом азимута ДП также приводит к погрешности определения курса объекта.
Все решения, соответствующие современному уровню техники, обладают тем недостатком, что они ограничены по точности измерения курса объекта из-за наличия выше перечисленных погрешностей.
Задачей настоящего изобретения является создание методов и средств измерения курса объекта, позволяющих повысить точность измерения курса объекта путем исключения выше перечисленных погрешностей.
Предлагается способ определения курса квазинеподвижного (например, жестко ошвартованного) объекта, включающий установку на объекте гиротеодолита, определение с помощью гиротеодолита азимута направления, заданного отметчиками ДП внутри объекта, определение изменения углового положения объекта в моменты начала и конца цикла измерений гиротеодолита, корректировку результатов измерения гиротеодолита, используя результаты измерения изменения углового положения объекта в моменты начала и конца цикла измерений гиротеодолита. При этом изменение углового положения объекта определяют относительно горизонта и неподвижного берегового ориентира. В случае если помимо рыскания, объект совершает более сложное движение, то предложено определять углы наклона центральной контрольной площадки и учитывать результаты измерений наклонов объекта в измерениях гиротеодолита. Для исключения погрешности, возникающей от деформации скручивания места установки гиротеодолита относительно места установки теодолита, измеряющего углы рыскания объекта, авторами предложено измерять угол скручивания во время измерения гиротеодолитом азимута ДП объекта и корректировать показания гиротеодолита.
Устройство для определения курса объекта, предложенное авторами, включает:
- гиротеодолит, устанавливаемый на объекте так, что обеспечивается оптическая связь с отметчиками ДП внутри объекта,
- первый теодолит, установленный снаружи объекта и механически с ним связанный,
- ориентир, либо второй теодолит, устанавливаемые на берегу, при этом теодолит, устанавливаемый на объекте, оптически связан с ориентиром или со вторым теодолитом,
- измерители качек и контроллер, при этом выход измерителя качек соединен с первым входом контроллера, на второй вход которого подаются данные с выхода гиротеодолита, а выход контроллера подключен либо к дисплею, либо к центральному компьютеру объекта
- измеритель деформации скручивания в месте установки первого теодолита, выход которого соединен с третьим входом контроллера.
В качестве измерителя качек в устройстве может быть использовано контролируемое корабельное средство навигации. Описанные способ и устройство для его реализации могут быть применены для контроля погрешности выработки курса корабельным средством навигации. Для этого синхронно измеряется курс объекта средством, предложенным авторами, и средством навигации корабля. При сравнении полученных курсов определяется погрешность выработки курса корабельным средством навигации.
Работа устройства поясняется чертежом, где обозначено:
1 - квазинеподвижный объект,
2 - первый теодолит, установленный на верхней палубе объекта,
3 - береговой ориентир,
4 - кормовой отметчик ДП,
5 - контроллер,
6 - палуба внутри объекта,
7 - гиротеодолит,
8 - измеритель качки объекта,
9 - носовой отметчик ДП,
10 - измеритель деформации (угла скручивания),
11 - второй теодолит, установленный на берегу,
12 - береговая черта.
На квазинеподвижном объекте 1 устанавливают на верхней палубе первый теодолит 2 так, что он жестко связан с корпусом объекта. При этом удаленный ориентир 3 должен находиться на таком расстоянии от первого теодолита 2, чтобы погрешность в измерении азимута направления - ΔА на береговой ориентир, вызванная линейными перемещениями объекта ΔL не превышала 2". Для этого расстояние до удаленного объекта L должно удовлетворять неравенству L>2ΔL·105, где ΔL - величина линейного перемещения в направлении перпендикуляра к линии визирования берегового ориентира. Гиротеодолит 7 размещают внутри объекта как можно ближе к центру качания объекта и так, чтобы угломер гиротеодолита 7 мог визировать отметчики ДП. Производят пуск гиротеодолита 7. Одновременно первым теодолитом 2 определяют направление - ϕ1 на береговой ориентир 3 или на второй теодолит 11, установленные на берегу. Одновременно с завершением цикла измерений гиротеодолитом 7 азимута ДП - АДП определяют первым теодолитом 2 снова направление на береговой ориентир 3 или на второй теодолит 11 - ϕ2. Вычисляют поправку Δϕ=ϕ1-ϕ2 и корректируют результаты измерения азимута ДП, используя формулу: АДПϕ=АДП±Δϕ. Знак у поправки положительный при вращении объекта против часовой стрелки. Знак поправки отрицательный при вращении объекта против часовой стрелки. Аналогично используют поправки, определенные измерителями угла скручивания 10 ϕск и качек ϕк Тогда для определения курса объекта используют выражение: Kоб=АДПϕ±ϕск±ϕк. Поправки Δ ϕ, ϕск и ϕк могут вводиться и вручную оператором на соответствующие входы контроллера, либо автоматически по линиям связи, указанным в описании устройства.
Как показал проведенный заявителями информационный поиск, из уровня техники не известен способ и устройство с перечисленной совокупностью существенных признаков, то есть заявляемые способ и устройство для его реализации обладают новизной, отличаясь от известных решений тем, что дополнительно определяют изменение углового положения квазинеподвижного объекта 1 на интервале цикла измерений гиротеодолита, корректируют результаты измерения гиротеодолита 7, используя результаты измерения углового положения объекта 1 на интервале измерений гиротеодолита 7. Кроме поправки, связанной с изменением углового положения объекта 1 в течение цикла измерений гиротеодолитом 7, в способе дополнительно предлагается измерять поправки, вызванные углом скручивания места установки первого теодолита 2 и наклоном палубы 6 на том же временном интервале.
В устройстве для этого дополнительно введены:
- измерители качек объекта 8 и контроллер 5, при этом выход измерителя качек 8 соединен с первым входом контроллера 5, на второй вход которого подаются данные с выхода гиротеодолита 7, а выход контроллера 5 подключен либо к дисплею, либо к центральному компьютеру объекта;
- измеритель деформации (угла скручивания) 10 места установки первого теодолита 2 относительно места установки гиротеодолита 7, а выход измерителя 10 соединен с третьим входом контроллера 5.
Учитывая, что флуктационная составляющая погрешности выработки курса навигационным средством на интервале измерения гиротеодолитом 7 курса объекта может быть незначительной и ей можно пренебречь, то корабельное средство курсоуказания может заменить теодолит и береговой ориентир для измерения разворота объекта на интервале работы гиротеодолита.
Заявленные способ и устройство для его реализации с учетом зависимых пунктов формулы позволяют существенно повысить точность измерения курса объекта и повысить точность контроля выработки курса корабельными средствами навигации.
Как было указано, заявителям неизвестны технические решения, обладающие совокупностью перечисленных отличительных признаков и обеспечивающие получение выше названного результата, поэтому заявители считают, что заявленные способ и устройство для его реализации соответствуют каждый критериям «новизна» и «изобретательский уровень».
Заявляемые способ и устройство для его осуществления могут быть реализованы с применением соответствующих современных оборудования и технологий и могут найти широкое применение при высокоточном измерении курса квазинеподвижного объекта и при проведении контроля погрешности выработки курса корабельными средствами навигации, поэтому соответствуют критерию промышленной применимости.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО СТАБИЛИЗАЦИИ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ УКАЗАТЕЛЬНЫХ ОГНЕЙ СИСТЕМЫ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2007 |
|
RU2350517C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ АСТРОНОМИЧЕСКОГО АЗИМУТА | 2007 |
|
RU2347252C1 |
| ОПТИЧЕСКАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ПАЛУБУ КОРАБЛЯ | 2006 |
|
RU2317233C1 |
| СПОСОБ УПРАВЛЕНИЯ КОРАБЕЛЬНЫМ КОМПЛЕКСОМ ОРУЖИЯ | 2013 |
|
RU2522356C1 |
| Устройство определения одновысотных высокоточных геодезических базовых направлений в полевых условиях | 2021 |
|
RU2772736C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСА И КООРДИНАТ САМОЛЕТА | 2007 |
|
RU2356012C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| ГИРОКОМПАС С ВИЗУАЛЬНЫМ КАНАЛОМ | 2017 |
|
RU2656263C1 |
| ГИРОКОМПАС С ВИЗУАЛЬНЫМ КАНАЛОМ | 2017 |
|
RU2650425C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОДГОТОВКИ И НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2434202C1 |
Изобретение относится к измерительной технике и, в частности к средствам прецизионного измерения курса объекта при контроле погрешности выработки курса системами навигации корабля при нахождении его у причала. Технический результат - повышение точности измерения курса объекта. При этом первый теодолит находится на берегу, а второй - на корабле. Теодолитами измеряется угол поворота корабля за время определения гиротеодолитом его курса и далее учитывается при его определении. В зависимых пунктах формулы способа предложено за то же время определять угол наклона корабля и измерять угол скручивания места установки первого теодолита относительно места установки гиротеодолита и учитывать при определении курса корабля. Устройство включает гиротеодолит, установленный во внутренних помещениях корабля так, что обеспечивается оптическая связь с отметчиками диаметральной плоскости объекта, и дополнительно в устройство включены: первый теодолит, установленный снаружи объекта и механически с ним связанный, ориентир, либо второй теодолит, устанавливаемые на берегу, при этом теодолит, устанавливаемый на объекте, оптически связан с ориентиром или со вторым теодолитом, измеритель качек объекта и контроллер, при этом выход измерителя качек соединен с первым входом контроллера, на второй вход которого подаются данные с выхода гиротеодолита, а выход контроллера подключен либо к дисплею, либо к центральному компьютеру объекта. В зависимых пунктах формулы устройства дополнительно включен измеритель угла скручивания. В качестве измерителя качек может служить навигационное средство объекта. 2 н. и 6 з.п. ф-лы, 1 ил.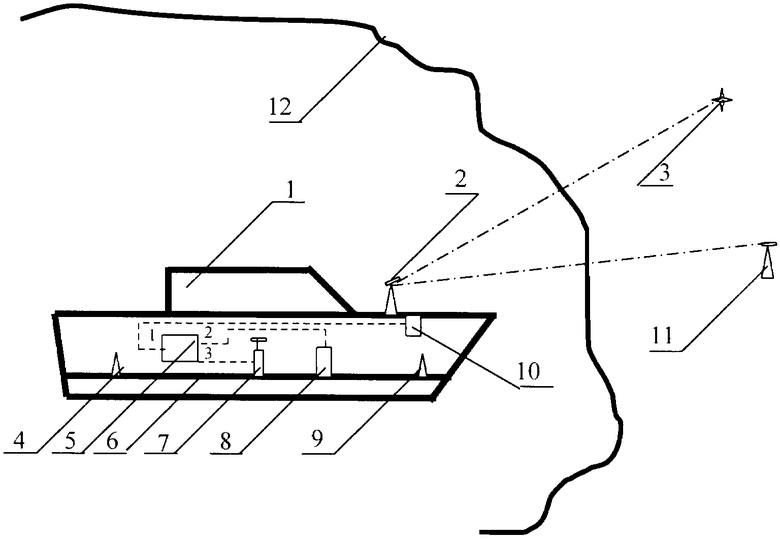
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИЙ И УГЛОВ ОРИЕНТАЦИИ КОРАБЛЯ С УЧЕТОМ ДЕФОРМАЦИЙ | 2004 |
|
RU2261417C1 |
| Способ определения координат пунктов навигационно-геодезической сети | 1990 |
|
SU1782315A3 |
| JP 59216015 A, 06.12.1984 | |||
| Способ послойного рентгеноструктурного анализа поверхностных слоев поликристаллов | 1985 |
|
SU1318872A1 |

