Изобретение относится к технике обеспечения безопасности воздушного движения судов гражданской авиации и других летательных аппаратов.
Известно техническое решение по предотвращению несанкционированного полета летательного аппарата, например самолета, путем вывода его из строя посредством реактивного снаряда, запускаемого с истребителя-перехватчика (Боечин И. С индексом «Р»./ Техника - молодежи, 2000, 9, с.30-35).
Известно техническое решение по предотвращению несанкционированного полета летательного аппарата посредством его разрушения зенитной ракетой (Мерилл Г., Исследование операций, пер. с англ. - М.: Из-во «Иностр. литература», 1959, с.299-311).
Недостатком известных технических решений является уничтожение летательного аппарата с опасными последствиями для жизни членов экипажа и пассажиров.
Известно техническое решение по предотвращению несанкционированного полета самолета путем перехвата истребителем-перехватчиком (Степанов Г. Разбор полетов. «Известия», 3.04. 2001, 58 (25896) - 1 с.). В результате повреждения самолет, как правило, совершает вынужденную посадку зачастую на плохо подготовленную полосу и существует риск полного разрушения самолета. Кроме того, эффективность предотвращения несанкционированного полета самолета мала в случае физической невозможности членов экипажа управлять самолетом.
Наиболее близкой к предложенной является система предотвращения несанкционированного передвижения летательного аппарата по патенту РФ №2214934, B60R 25/02, 27.10.2003.
Указанная система обеспечивает предотвращение несанкционированного передвижения летательного аппарата при условии обеспечения безопасности пассажиров независимо от физического состояния экипажа.
При существующей тенденции оснащать пассажирские самолеты навигационными системами (НС) и автоматическими системами управления полетом и посадкой (АСУ) известная система путем воздействия на летательный аппарат, его системы или конструкцию ограничивает его функциональные возможности. В частности, посредством автоматической системы управления полетом, дистанционно переключаемой в автономный режим, летательный аппарат переводится на траекторию полета к аэродрому с последующим выполнением посадки. При этом для обнаружения несанкционированного передвижения летательного аппарата используются средства контроля за воздушным пространством. Автоматическую систему управления полетом и посадкой летательного аппарата в автономный режим переключают с наземного радиопередающего пункта или используют самолет-перехватчик, снабженный радиопередатчиком.
Задачей изобретения является повышение помехоустойчивости и достоверности контролируемого изменения траектории полета самолета с последующим выполнением посадки, что позволяет эффективно предотвращать несанкционированное передвижение летательного аппарата.
Поставленная задача решается тем, что в системе предотвращения несанкционированного передвижения летательного аппарата, в частности пассажирского самолета, содержащей командный пункт с передатчиком, приемником и дуплексером, с которым связана приемопередающая антенна, истребитель-перехватчик с передатчиком, приемником и дуплексером, с которым связана приемопередающая антенна, а также установленные на летательном аппарате передатчик, приемник, дуплексер, с которым связана приемопередающая антенна, закрытая радиопрозрачным обтекателем, блок переключения, с которым связаны сигнальный фонарь и автоматическая система управления полетом и посадкой летательного аппарата, на летательном аппарате передатчик выполнен в виде последовательно включенных задающего генератора, амплитудного модулятора, второй вход которого соединен с выходом источника аналоговых сообщений, и усилителя мощности, выход которого подключен к входу дуплексера, приемник выполнен в виде последовательно подключенных к выходу дуплексера первого полосового фильтра, элемента ИЛИ, второй вход которого через второй полосовой фильтр соединен с выходом дуплексера, амплитудного ограничителя, синхронного детектора, второй вход которого соединен с выходом элемента ИЛИ, и звукового сигнализатора, к выходу амплитудного ограничителя последовательно подключены удвоитель фазы, первый узкополосный фильтр, делитель фазы на два, второй узкополосный фильтр и фазовый детектор, второй вход которого соединен с выходом амплитудного ограничителя, а выход подключен к входу блока переключения, на командном пункте последовательно включены относящиеся к передатчику задающий генератор, фазовый манипулятор, второй вход которого через переключатель соединен с i-м генератором псевдослучайной последовательности, амплитудный модулятор, второй вход которого соединен с выходом источника аналоговых сообщений, и усилитель мощности передатчика, а также дуплексер и относящиеся к приемнику первый полосовой фильтр, элемент ИЛИ, второй вход которого через второй полосовой фильтр соединен с выходом дулексера, амплитудный ограничитель, синхронный детектор, второй вход которого соединен с выходом элемента ИЛИ, и звуковой сигнализатор приемника, на истребителе-перехватчике передатчик выполнен в виде последовательно включенных задающего генератора, фазового манипулятора, амплитудного модулятора, второй вход которого через первый элемент ИЛИ соединен с выходами источника аналоговых сообщений и синхронного детектора, и усилителя мощности, выход которого подключен ко входу дуплексера, приемник выполнен в виде последовательно подключенных к выходу дуплексера первого полосового фильтра, второго элемента ИЛИ, второй вход которого через второй полосовой фильтр соединен с выходом дуплексера, амплитудного ограничителя, синхронного детектора, второй вход которого соединен с выходом второго элемента ИЛИ, и звукового сигнализатора, к выходу амплитудного ограничителя последовательно подключены удвоитель фазы, первый узкополосный фильтр, делитель фазы на два, второй узкополосный фильтр и фазовый детектор, второй вход которого соединен с выходом амплитудного ограничителя, а выход подключен ко второму входу фазового манипулятора.
Упрощенная схема, на которой показано взаимное положение самолета, совершающего несанкционированный полет, и истребителя-перехватчика, изображена на фиг.1. Структурная схема бортового оборудования летательного аппарата представлена на фиг.2. Структурная схема наземного оборудования командного пункта представлена на фиг.3. Структурная схема бортового оборудования истребителя-перехватчика представлена на фиг.4. Временные диаграммы, поясняющие принцип работы системы, реализующей предлагаемый способ, изображены на фиг.5, 6.
Система содержит летательный аппарат 1, истребитель-перехватчик 7 и командный пункт.
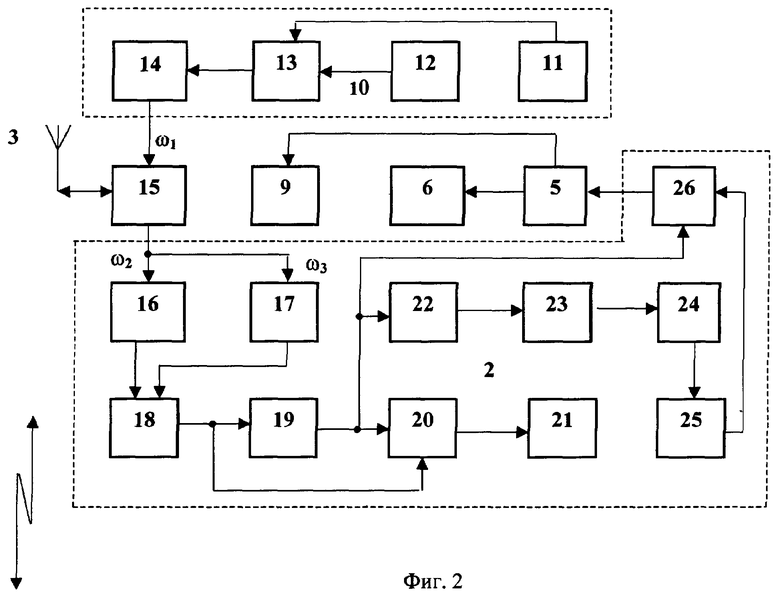
На борту летательного аппарата 1 установлены приемник 2, приемопередающая антенна 3, закрытая радиопрозрачным обтекателем 4, передатчик 10, дуплексер 15, блок 5 переключения, с которым связаны сигнальный фонарь 6 и автоматическая система 9 управления полетом и посадкой (АСУ).
Передатчик 10 выполнен в виде последовательно включенных задающего генератора 11, амплитудного модулятора 13, второй вход которого соединен с выходом источника 12 аналоговых сообщений, и усилителя 14 мощности, выход которого через дуплексер 15 связан с приемопередающей антенной 3. Приемник 2 выполнен в виде последовательно подключенных к выходу дуплексера 15 первого полосового фильтра 16, элемента ИЛИ 18, второй вход которого через второй полосовой фильтр 17 соединен с выходом дуплексера 15, амплитудного ограничителя 19, синхронного детектора 20, второй вход которого соединен с выходом элемента ИЛИ 18, и звукового сигнализатора 21. К выходу амплитудного ограничителя 19 последовательно подключены удвоитель 22 фазы, первый узкополосный фильтр 23, делитель 24 фазы на два, второй узкополосный фильтр 25 и фазовый детектор 26, второй вход которого соединен с выходом амплитудного ограничителя 19, а выход подключен к сигнальному фонарю 6 и к автоматической системе 9 управления полетом и посадкой (АСУ).
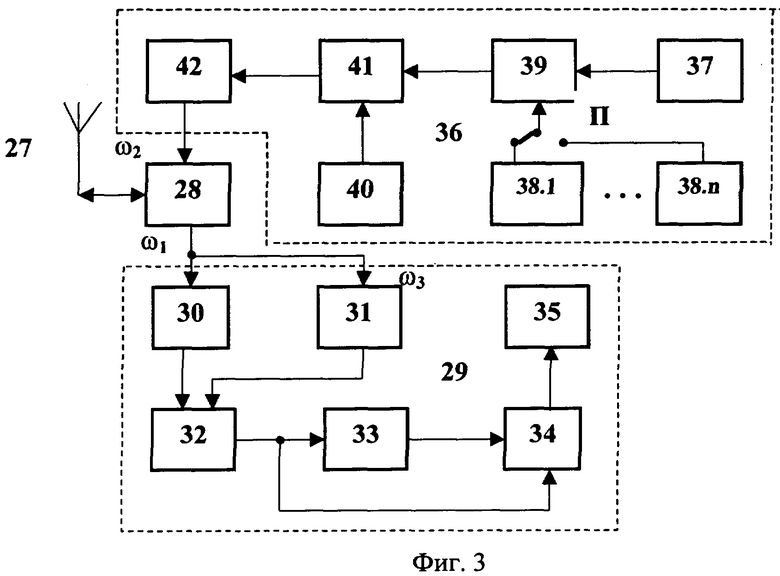
Наземное оборудование командного пункта выполнено в виде последовательно включенных задающего генератора 37, фазового манипулятора 39, второй вход которого через переключатель П соединен с i-м генератором 38.i псевдослучайной последовательности (ПСП), амплитудного модулятора 41, второй вход которого соединен с выходом источника 40 аналоговых сообщений, усилителя 42 мощности, дуплексера 28, вход-выход которого связан с приемопередающей антенной 27, первого полосового фильтра 30, элемента ИЛИ 32, второй вход которого через второй полосовой фильтр 31 соединен с выходом дуплексера 28, амплитудного ограничителя 33, синхронного детектора 32, второй вход которого соединен с выходом элемента ИЛИ 32, и звукового сигнализатора 35.
Задающий генератор 37, фазовый манипулятор 39, генераторы ПСП 38.i (i=1, 2, ..., n), источник 40 аналоговых сообщений, амплитудный модулятор 41 и усилитель 42 мощности образуют передатчик 36.
Полосовые фильтры 30 и 31, элемент ИЛИ 32, амплитудный ограничитель 33, синхронный детектор 34 и звуковой сигнализатор 35 образуют приемник 29.
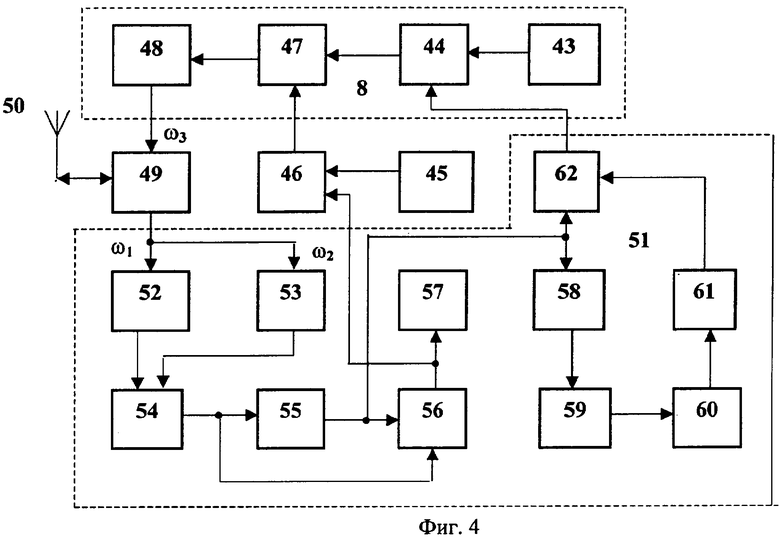
Бортовое оборудование истребителя-перехватчика 7 содержит передатчик 8, источник 45 аналоговых сообщений, первый элемент ИЛИ 46, дуплексер 49, приемопередающую антенну 50 и приемник 51.
Передатчик 8 выполнен в виде последовательно включенных задающего генератора 43, фазового манипулятора 44, амплитудного модулятора 47, второй вход которого через первый элемент 46 соединен с выходом источника 45 аналоговых сообщений и синхронного детектора 56, и усилителя 48 мощности, выход которого через дуплексер 49 связан с приемопередающей антенной 50.
Приемник 51 выполнен в виде последовательно подключенных к выходу дуплексера 49 первого полосового фильтра 52, элемента ИЛИ 54, второй вход которого через второй полосовой фильтр 53 соединен с выходом дуплексера 49, амплитудного ограничителя 55, синхронного детектора 56, второй вход которого соединен с выходом элемента ИЛИ 54, и звукового сигнализатора 57. К выходу амплитудного ограничителя 55 последовательно подключены удвоитель 58 фазы, первый узкополосный фильтр 59, делитель 60 фазы на два, второй узкополосный фильтр 61 и фазовый детектор 62, второй вход которого соединен с выходом амплитудного ограничителя 55, а выход подключен к второму входу фазового манипулятора 44.
Частота настройки ωн1 полосовых фильтров 30 и 52 выбрана равной ωн1=ω1.
Частота настройки ωн2 полосовых фильтров 16 и 53 выбрана равной ωн2=ω2.
Частота настройки ωн3 полосовых фильтров 31 и 17 выбрана равной ωн3=ω3.
Приемник 2, передатчик 10, дуплексер 15, блок 5 переключения и автоматическая система 9 управления полетом и посадкой установлены в отсеках, недоступных для лиц, находящихся на борту самолета 1.
В запоминающее устройство вычислителя навигационной системы самолета 1 перед вылетом записывают координаты оборудованных для автоматической посадки самолета аэропортов и соответствующие им порядковые номера, а также данные о маршрутах следования к аэропортам. В запоминающее устройство блока 5 переключения записывается идентификационный код данного самолета.
Предложенная система работает следующим образом.
При нормальном полете самолет 1 управляется экипажем. В случае возникновения на борту самолета нештатной ситуации, о чем может быть сообщено по радиосвязи или при изменении курса самолета, зафиксированного службой контроля за воздушным движением, ответственными органами совместно с диспетчерскими службами аэропортов и дежурным по командному пункту (КП) управления тактической авиацией решается вопрос о применении средств противодействия.
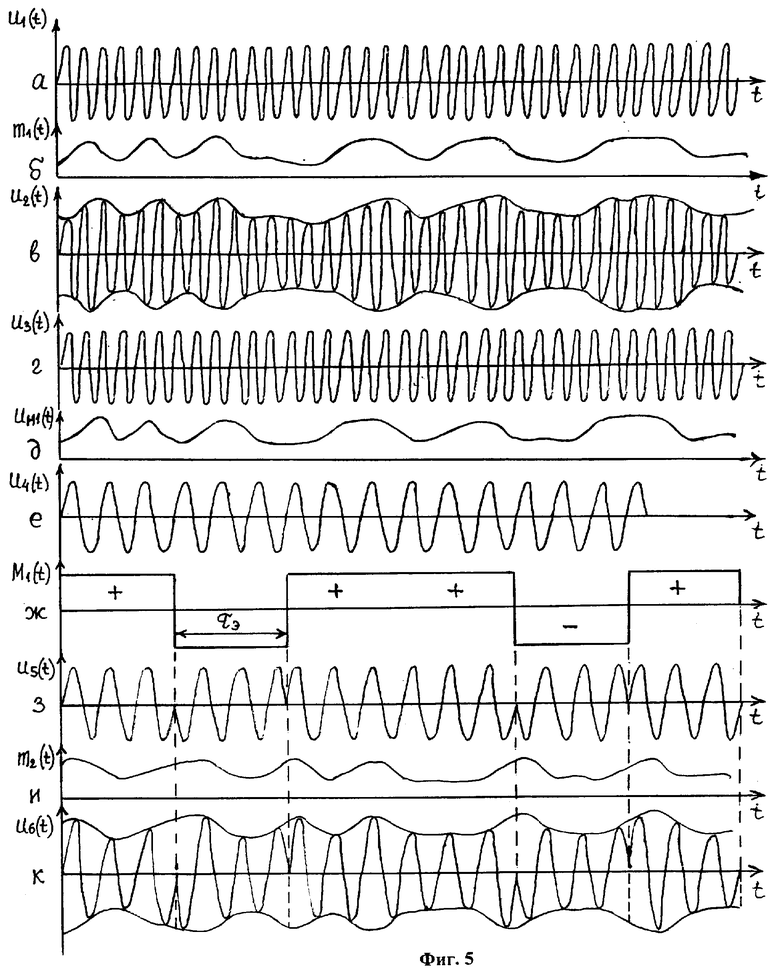
При возникновении на борту самолета 1 нештатной ситуации экипаж включает передатчик 10. В этом случае задающим генератором 11 формируется высокочастотное колебание (фиг.5, а)
u1(t)=U1cos(ω1t+ϕ1), 0≤t≤T1,
где U1, ω1, ϕ1, T1 - амплитуда, несущая частота, начальная фаза и длительность высокочастотного колебания, которое поступает на первый вход амплитудного модулятора 13, на второй вход которого подается модулирующая функция m1(t) (фиг.5, б), отображающая аналоговое сообщение экипажа, с выхода источника 12 аналоговых сообщений, например микрофона. На выходе амплитудного модулятора 13 образуется амплитудно-модулированный (AM) сигнал (фиг.5, в)
u2(t)=U2[1+m1(t)]cos(ω1t+ϕ1), 0≤t≤T1,
который после усиления в усилителе 14 мощности через дуплексер 15 поступает в приемопередающую антенну 3 и излучается ею в эфир.
Если самолет 1 находится в зоне радиовидимости командного пункта, то АМ-сигнал u2(t) улавливается приемопередающей антенной 27 и через дуплексер 28 поступает на вход приемника 29, в котором выделяется полосовым фильтром 30 и через элемент ИЛИ 32 поступает на информационный вход синхронного детектора 34 и на вход амплитудного ограничителя 33. На выходе последнего образуется гармоническое колебание (фиг.5, г)
u3(t)=U0cos(ω1t+ϕ1), 0≤t≤T1,
где U0 - порог ограничения, которое используется в качестве опорного напряжения и поступает на опорный вход синхронного детектора 34. На выходе синхронного детектора 34 образуется низкочастотное напряжение (фиг.5, д)
uн1(t)=Uн1[1+m1(t)],
где
пропорциональное модулирующей функции m1(t) (фиг.5, б), которое поступает на звуковой сигнализатор 35. Последний воспроизводит аналоговое сообщение экипажа самолета о нештатной ситуации на его борту. На командном пункте включают передатчик 36. При этом задающим генератором 37 формируется высокочастотное колебание (фиг.5, е)
u4(t)=U4cos(ω2t+ϕ2), 0≤t≤Т2,
которое поступает на первый вход фазового манипулятора 39. На второй вход последнего подается модулирующий код M1(t) (фиг.5, ж), соответствующий идентификационному коду самолета 1. При этом переключатель П переводится в соответствующее положение. Каждому пассажирскому самолету соответствует свой генератор 38.i псевдослучайной последовательности (i=1, 2, ..., n). На выходе фазового манипулятора образуется сложный сигнал с фазовой манипуляцией (ФМн) (фиг.5, з)
u5(t)=U4cos[ω2t+ϕk1(t)+ϕ2], 0≤t≤T2,
где ϕk1(t)={0,π}-манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M1(t) (фиг.5, ж), при этом ϕk1(t)=const, при kτЭ<t<(k+1)τЭ, и может изменяться скачком при t=kτЭ, т.е. на границах между элементарными посылками(к=1, 2, ..., N-1); τЭ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Т2 (Т2=NτЭ), который поступает на первый вход амплитудного модулятора 41, на второй вход которого подается модулирующая функция m2(t) (фиг.5, и), отображающая аналоговое сообщение о переводе самолета в автономный режим полета и посадки на ближайший аэродром. На выходе амплитудного модулятора 41 образуется сложный сигнал с комбинированной фазовой манипуляцией и амплитудной модуляцией (ФМн-АМ) (фиг.5, к)
u6(t)=U6[1+m2(t)]cos[ω2t+ϕk1(t)+ϕ2], 0≤t≤T2,
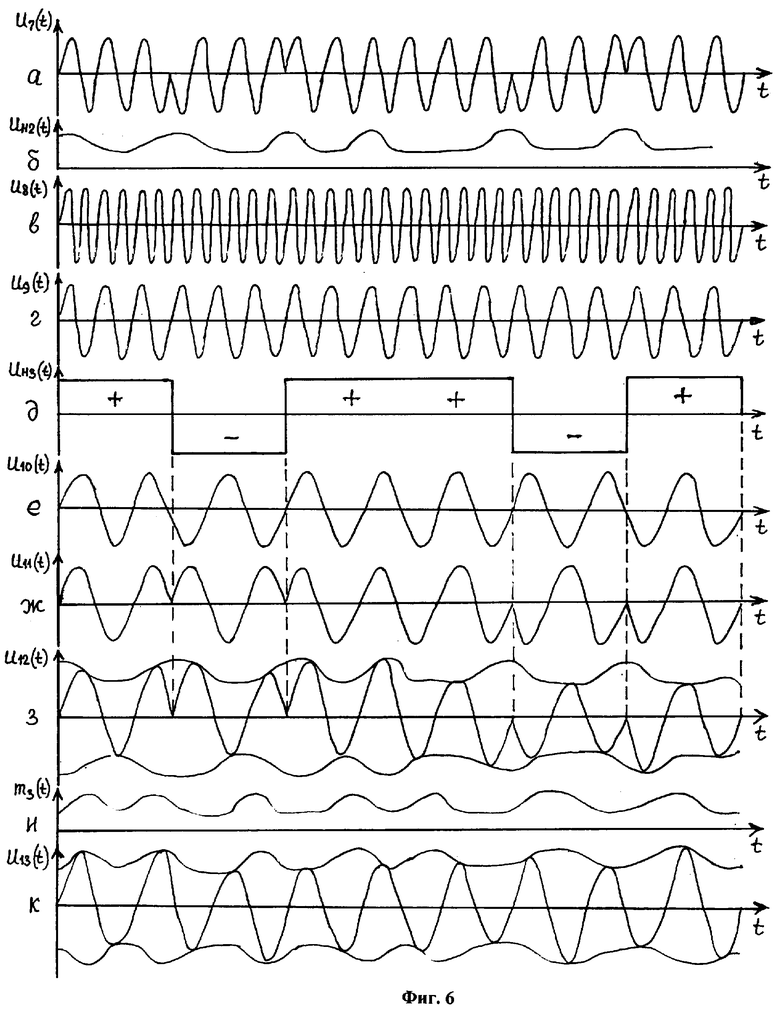
который после усиления в усилителе 42 мощности через дуплексер 28 поступает в приемопередающую антенну 27 и излучается ею в эфир, улавливается приемопередающей антенной 3 и через дуплексер 15 поступает на вход приемника 2, в котором выделяется полосовым фильтром 16 и через элемент ИЛИ 18 поступает на информационный вход синхронного детектора 20 и на вход амплитудного ограничителя 19. На выходе последнего образуется ФМн-сигнал (фиг.6, а)
u7(t)=U0cos[ω2t+ϕk1(t)+ϕ2], 0≤t≤T2,
где U0 - порог ограничения, которое используется в качестве опорного напряжения и поступает на опорный вход синхронного детектора 20. На выходе синхронного детектора 20 образуется низкочастотное напряжение (фиг.6, б)
uH2(t)=UH2[1+m2(t)],
где
пропорциональное модулирующей функции m2(t) (фиг.5, и), которое поступает на звуковой сигнализатор 21. Последний воспроизводит аналоговое сообщение КП о переводе самолета в автономный режим полета.
Одновременно ФМн-сигнал u7(t) (фиг.6, а) с выхода амплитудного ограничителя 19 поступает на вход удвоителя 22 фазы, на выходе которого образуется гармоническое напряжение (фиг.6, в)
u8(t)=U8cos(2ω2t+2ϕ2), 0≤t≤T2,
где
В качестве удвоителя 22 фазы может быть использован перемножитель, на два входа которого подается один и тот же ФМн-сигнал u7(t).
Так как 2ϕk1={0,2π}, то в гармоническом напряжении фазовая манипуляция уже отсутствует. Гармоническое напряжение u8(t) выделяется узкополосным фильтром 23 и поступает на вход делителя 24 фазы на два, на выходе которого образуется гармоническое напряжение (фиг.6, г)
u9(t)=U9cos(ω2t+ϕ2), 0≤t≤T2,
которое выделяется узкополосным фильтром 25, используется в качестве опорного напряжения и поступает на опорный вход фазового детектора 26, на информационный вход которого подается ФМн-сигнал u7(t) с выхода амплитудного ограничителя 19. На выходе фазового детектора 26 образуется низкочастотное напряжение (фиг.6, д)
uH3(t)=UH3cosϕk1(t),
где
пропорциональное модулирующему коду M1(t), соответствующему идентификационному коду самолета 1. Данное напряжение поступает в блок 5 переключения, где сравнивается с идентификационным кодом самолета. При положительном результате сравнения в блоке 5 формируется команда на переключение АСУ 9 в автономный режим работы и включается сигнальный фонарь 6. Если декодированный сигнал содержит информацию о номере аэропорта, тогда данная информация передается в НС. При отсутствии указанной информации самолет 1 посредством НС будет направлен в ближайший на момент переключения АСУ 9 аэропорт, координаты которого записаны в запоминающем устройстве вычислителя НС (не показан). Таким образом, переключение АСУ 9 позволяет предотвратить несанкционированное передвижение самолета 1 и направить его к определенному месту посадки.
Если самолет 1 находится вне зоны радиовидимости командного пункта и принимается решение о его перехвате, то в воздух поднимается подготовленный истребитель-перехватчик 7. Предварительно в запоминающее устройство процессора передатчика 8 записывают идентификационный код самолета 1, а в случае необходимости номер аэропорта, куда следует направить самолет 1. Указанная информация может перезаписываться или корректироваться с пульта пилота в соответствии с указаниями дежурного по КП. На КП формируется сложный сигнал с комбинированной фазовой манипуляцией и амплитудной модуляцией (ФМн-АМ) u6(t) (фиг.5, к), который содержит необходимую информацию для истребителя-перехватчика 7. Этот сигнал излучается в эфир, улавливается приемопередающей антенной 50 и через дуплексер 49, полосовой фильтр 53 и элемент ИЛИ 54 поступает на вход амплитудного ограничителя 55, на выходе которого образуется напряжение u7(t) (фиг.6, а), которое поступает на опорный вход синхронного детектора 56. На выходе синхронного детектора 56 образуется низкочастотное напряжение uн2(t), которое воспроизводится звуковым сигнализатором 57. Опорное напряжение, необходимое для работы фазового детектора 62, выделяется непосредственно из принимаемого сигнала u8(t) (фиг.6, в) и u9(t) (фиг.6, г). На выходе фазового детектора 62 формируется низкочастотное напряжение uH3(t) (фиг.6, д).
Задающий генератор 43 формирует высокочастотное колебание (фиг.6, е)
u10(t)=U10cos(ω3t+ϕ3), 0≤t≤Т3,
которое поступает на первый вход фазового манипулятора 44. На второй вход последнего подается низкочастотное колебание uн3(t) (фиг.6, д) с выхода фазового детектора 62, которое представляет собой закодированную команду КП. На выходе фазового манипулятора 44 образуется ФМн-сигнал (фиг.6, ж)
u11(t)=U10cos[ω3t+ϕk1(t)+ϕ3], 0≤t≤Т3,
который поступает на первый вход амплитудного модулятора 47, на второй вход которого подается низкочастотное напряжение uH2(t) (фиг.6, б) с выхода синхронного детектора 56. На выходе амплитудного модулятора 47 формируется сложный сигнал с комбинированной фазовой манипуляцией и амплитудной модуляцией (ФМн-АМ) (фиг.6, з)
u12(t)=U12[1+m2(t)]cos[ω3t+ϕk(t)+ϕ3], 0≤t≤Т3,
который после усиления в усилителе 48 мощности через дуплексер 49 поступает в приемопередающую антенну 50, излучается ею в эфир, улавливается приемопередающей антенной 3 самолета 1 и обрабатывается так, как это описано выше. В этом случае бортовая аппаратура истребителя-перехватчика 7 выполняет функции ретранслятора.
Пилот истребителя-перехватчика 7 контролирует по загоранию сигнального фонаря 6 переключение АСУ 9 в автономный режим работы и докладывает об этом на КП. При этом аналоговое сообщение с выхода источника 45 через элемент ИЛИ 46 поступает на второй вход амплитудного модулятора 48, на первый вход которого с выхода задающего генератора 43 через фазовый манипулятор 44, второе плечо которого не работает, подается высокочастотное колебание u10(t) (фиг.6, е). На выходе амплитудного модулятора 48 в этом случае формируется АМ-сигнал (фиг.6, к)
u13(t)=U13[1+m3(t)]cos[ω3t+ϕ3], 0≤t≤Т3,
который после усиления в усилителе 48 мощности через дуплексер 49 поступает в приемопередающую антенну 50, излучается ею в эфир, улавливается приемопередающей антенной 27 КП и обрабатывается так, как это описано выше.
Самолет 1 следует по заданному маршруту и осуществляет посадку независимо от действий экипажа или посторонних лиц, находящихся в самолете.
Таким образом, предложенная система по сравнению с прототипом обеспечивает повышение помехоустойчивости и достоверности контролируемого, изменения траектории полета самолета с последующим выполнением посадки. Это достигается использованием дуплексной радиосвязи между самолетом, истребителем-перехватчиком и командным пунктом с применением трех частот и сложных сигналов с комбинированной фазовой манипуляцией и амплитудной модуляцией.
Указанные сигналы открывают новые возможности в технике передачи сообщений. Они позволяют применять новый вид селекции - структурную селекцию. Это значит, что появляется новая возможность разделять сигналы, действующие в одной и той же полосе частот и в одни и те же промежутки времени.
С точки зрения обнаружения и разведки сложные сигналы с комбинированной фазовой манипуляцией и амплитудной модуляцией обладают высокой энергетической и структурной скрытностью.
Энергетическая скрытность данных сигналов обусловлена их высокой сжимаемостью во времени и по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого сложный сигнал в точке приема может оказаться замаскированным шумами и помехами. Причем энергия сложного сигнала отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех. Структурная скрытность сложных сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных сигналов априорно неизвестной структуры с целью повышения чувствительности приемника.
Предусмотренное кодирование сложных сигналов исключает случайное вмешательство посторонних лиц в процесс управления самолетом.
Предложенная система может быть применена независимо от ситуации на борту самолета и физического состояния членов экипажа, что является важным преимуществом системы и обеспечивает ее высокую эффективность.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВАРИЙНО-СИГНАЛЬНАЯ СИСТЕМА | 2007 |
|
RU2355603C1 |
| ЭЛЕКТРОННЫЕ ШАХМАТНЫЕ ЧАСЫ | 2013 |
|
RU2527662C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ТЕРРОРИСТИЧЕСКОГО АКТА С ИСПОЛЬЗОВАНИЕМ САМОЛЕТА И СИСТЕМА ПРЕДОТВРАЩЕНИЯ ТЕРРОРИСТИЧЕСКОГО АКТА С ИСПОЛЬЗОВАНИЕМ САМОЛЕТА | 2007 |
|
RU2349511C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ВОЗДУШНЫМИ СУДАМИ | 2008 |
|
RU2384858C1 |
| "ЧЁРНЫЙ ЯЩИК" С СИГНАЛИЗАЦИЕЙ | 2013 |
|
RU2531779C2 |
| СИСТЕМА ДЛЯ РАДИОТЕЛЕФОННЫХ СООБЩЕНИЙ НА АВТОМАГИСТРАЛЯХ | 2011 |
|
RU2471244C1 |
| СИСТЕМА ДЛЯ РАДИОТЕЛЕФОННЫХ СООБЩЕНИЙ НА АВТОМАГИСТРАЛЯХ | 2009 |
|
RU2395121C1 |
| СПОСОБ ТОЧНОГО ПОЗИЦИОНИРОВАНИЯ И МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ | 2008 |
|
RU2365932C1 |
| КОГЕРЕНТНАЯ РАДИОЛИНИЯ | 2005 |
|
RU2286026C1 |
| УГЛОМЕСТНО-ВРЕМЕННАЯ ДОПЛЕРОВСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2008 |
|
RU2368550C1 |
Изобретение относится к технике обеспечения безопасности воздушного движения судов гражданской авиации и других летательных аппаратов. Система содержит истребитель-перехватчик и командный пункт. Летательный аппарат снабжен приемником, приемопередающей антенной, радиопрозрачным обтекателем, блоком переключения, сигнальным фонарем, автоматической системой управления полетом и посадкой, передатчиком, задающим генератором, источником аналоговых сообщений, амплитудным модулятором, усилителем мощности, дуплексером, двумя полосовыми фильтрами, элементом ИЛИ, амплитудным ограничителем, синхронным детектором, звуковым сигнализатором, удвоителем фазы, двумя узкополосными фильтрами, делителем фазы на два, фазовым детектором. Командный пункт снабжен приемопередающей антенной, дуплексером, приемником, двумя полосовыми фильтрами, элементом ИЛИ, амплитудным ограничителем, синхронным детектором, звуковым сигнализатором, передатчиком, задающим генератором, переключателем, генераторами псевдослучайной последовательности, фазовым манипулятором, источником аналоговых сообщений, амплитудным модулятором и усилителем мощности. Истребитель-перехватчик снабжен передатчиком, задающим генератором, фазовым манипулятором, источником аналоговых сообщений, двумя элементами ИЛИ, амплитудным модулятором, усилителем мощности, дуплексером, приемопередающей антенной, приемником, двумя полосовыми фильтрами, амплитудным ограничителем, синхронным детектором, звуковым сигнализатором, удвоителем фазы, двумя узкополосными фильтрами, делителем фазы на два и фазовым детектором. Изобретение позволяет повысить помехоустойчивость и достоверность контролируемого изменения траектории полета самолета с последующим выполнением посадки, что предопределяет эффективное предотвращение несанкционированного передвижения летательного аппарата. 6 ил.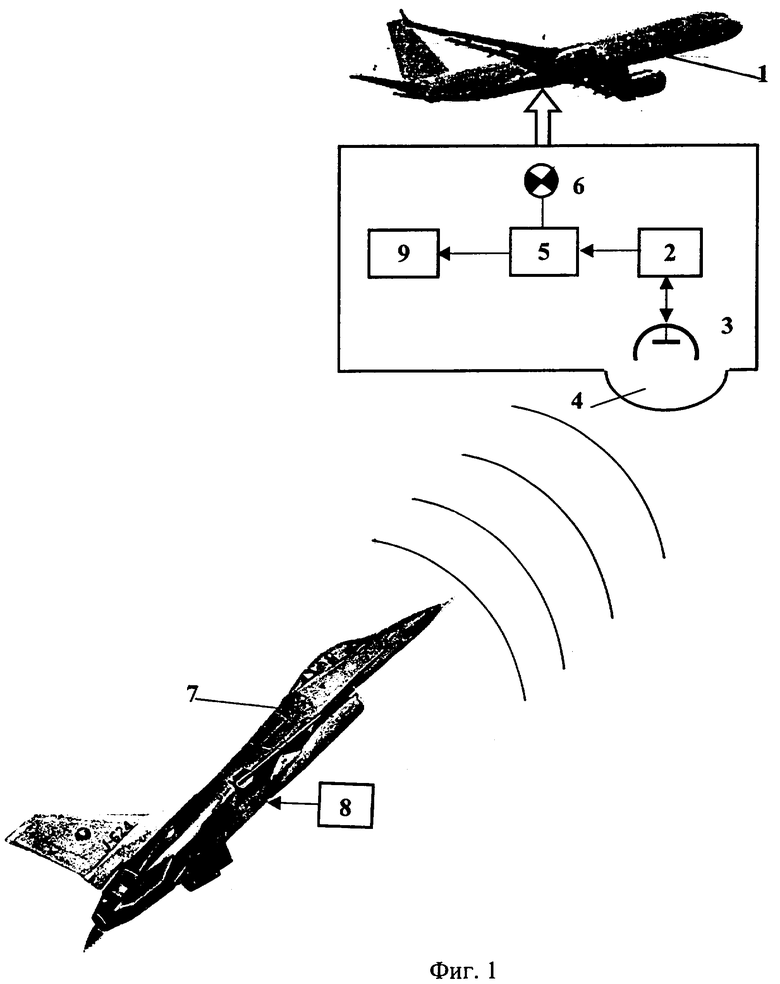
Система предотвращения несанкционированного передвижения летательного аппарата, в частности пассажирского самолета, содержащая командный пункт с передатчиком, приемником и дуплексером, с которым связана приемопередающая антенна, истребитель-перехватчик с передатчиком, приемником и дуплексером, с которым связана приемопередающая антенна, а также установленные на летательном аппарате передатчик, приемник, дуплексер, с которым связана приемопередающая антенна, закрытая радиопрозрачным обтекателем, блок переключения, с которым связаны сигнальный фонарь и автоматическая система управления полетом и посадкой летательного аппарата, отличающаяся тем, что на летательном аппарате передатчик выполнен в виде последовательно включенных задающего генератора, амплитудного модулятора, второй вход которого соединен с выходом источника аналоговых сообщений, и усилителя мощности, выход которого подключен к входу дуплексера, приемник выполнен в виде последовательно подключенных к выходу дуплексера первого полосового фильтра, элемента ИЛИ, второй вход которого через второй полосовой фильтр соединен с выходом дуплексера, амплитудного ограничителя, синхронного детектора, второй вход которого соединен с выходом элемента ИЛИ, и звукового сигнализатора, к выходу амплитудного ограничителя последовательно подключены удвоитель фазы, первый узкополосный фильтр, делитель фазы на два, второй узкополосный фильтр и фазовый детектор, второй вход которого соединен с выходом амплитудного ограничителя, а выход подключен к входу блока переключения, на командном пункте последовательно включены относящиеся к передатчику задающий генератор, фазовый манипулятор, второй вход которого через переключатель соединен с i-м генератором псевдослучайной последовательности, амплитудный модулятор, второй вход которого соединен с выходом источника аналоговых сообщений, и усилитель мощности передатчика, а также дуплексер и относящиеся к приемнику первый полосовой фильтр, элемент ИЛИ, второй вход которого через второй полосовой фильтр соединен с выходом дуплексера, амплитудный ограничитель, синхронный детектор, второй вход которого соединен с выходом элемента ИЛИ, и звуковой сигнализатор приемника, на истребителе-перехватчике передатчик выполнен в виде последовательно включенных задающего генератора, фазового манипулятора, амплитудного модулятора, второй вход которого через первый элемент ИЛИ соединен с выходами источника аналоговых сообщений и синхронного детектора, и усилителя мощности, выход которого подключен ко входу дуплексера, приемник выполнен в виде последовательно подключенных к выходу дуплексера первого полосового фильтра, второго элемента ИЛИ, второй вход которого через второй полосовой фильтр соединен с выходом дуплексера, амплитудного ограничителя, синхронного детектора, второй вход которого соединен с выходом второго элемента ИЛИ, и звукового сигнализатора, к выходу амплитудного ограничителя последовательно подключены удвоитель фазы, первый узкополосный фильтр, делитель фазы на два, второй узкополосный фильтр и фазовый детектор, второй вход которого соединен с выходом амплитудного ограничителя, а выход подключен к второму входу фазового манипулятора.
| СПОСОБ ПРЕДОТВРАЩЕНИЯ НЕСАНКЦИОНИРОВАННОГО ПЕРЕДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2214934C2 |
| РЕГИОНАЛЬНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА СВЯЗИ | 2004 |
|
RU2264034C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ НЕСАНКЦИОНИРОВАННОГО ИСПОЛЬЗОВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2002 |
|
RU2228543C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ЗАХВАТА САМОЛЕТА ИЛИ ТЕРРОРИСТИЧЕСКОГО АКТА НА НЕМ И СИСТЕМА БЕЗОПАСНОСТИ САМОЛЕТА | 2004 |
|
RU2269817C1 |

