Предлагаемое устройство относится к области авиационной техники и предназначено для определения расстояния между воздушными судами в полете.
Известны устройства и системы, обеспечивающие безопасность полетов летательных аппаратов (авт. свид. СССР №№293175, 926611, 1300531, 1792541; патенты РФ №№2111505, 2124760, 2126976, 2131622, 2134910, 2134911, 2256125; патенты США №№3714654, 4400780, 4 495580, 4789965; патент Великобритании №2232315; патент Франции №2037222; ЕР №№0283723, 0396071, 0707220; Анодина Т.Г. и др. Автоматизация управления воздушным движением. М.: Транспорт, 1992, С.213-218; Дикарев В.И. Безопасность, защита и спасение человека. - СПб.: Наука и техника, 2007. - С.163-171 и другие).
Из известных устройств и систем наиболее близким к предлагаемому является «Устройство для определения расстояния между воздушными судами» (патент РФ №2256195, G01S 13/93, 2003), которое и выбрано в качестве прототипа.
Указанное устройство предназначено для предотвращения столкновения воздушных судов и повышения безопасности полетов за счет определения истинного расстояния между воздушными судами с учетом высоты их полета. Если расстояние становится меньше некоторого порогового значения, то формируется сигнал, предупреждающий диспетчера, призывающий обратить внимание на движение воздушных судов (ВС), информация о которых фиксируется в соответствующих каналах сопровождения. Однако известное устройство обеспечивает определение истинного расстояния между воздушными судами с использованием наземной автоматизированной системы управления воздушным движением. И если расстояние между воздушными судами становится меньше некоторого порогового значения, то решение принимает диспетчер. Это обстоятельство связано с так называемым человеческим фактором и другими негативными явлениями.
В мировой практике известны случаи недобросовестного отношения диспетчеров к своим функциональным обязанностям, когда по вине диспетчерской службы происходили авиационные катастрофы. Поэтому возникает актуальная задача автономного дублирования при определении расстояния между воздушными судами.
Технической задачей изобретения является расширение функциональных возможностей устройства путем автономного дублирования при определении расстояния между воздушными судами и бортового номера приближающегося воздушного судна.
Поставленная задача решается тем, что устройство для определения расстояния между воздушными судами, содержащее последовательно включенные первый измеритель азимута, первый сумматор, второй вход которого соединен с выходом второго измерителя азимута, блок вычисления косинуса, седьмой блок умножения, четвертый сумматор, второй блок вычисления корня квадратного и индикатор, последовательно включенные первый измеритель высоты, первый блок умножения, второй вход которого соединен с выходом первого измерителя высоты, второй сумматор, второй вход которого соединен с выходом второго блока умножения, шестой блок умножения, второй вход которого соединен с выходом третьего сумматора, и первый блок вычисления корня квадратного, выход которого соединен со вторым входом седьмого блока умножения, последовательно включенные первый измеритель наклонной дальности и второй блок умножения, второй вход которого соединен с выходом первого измерителя наклонной дальности, а выход подключен ко второму входу четвертого сумматора, третий вход которого через третий блок умножения соединен с выходами первого и второго измерителя высоты, последовательно включенные второй измеритель высоты, четвертый блок умножения, второй вход которого соединен с выходом второго измерителя высоты, и третий сумматор, второй вход которого соединен с выходом пятого блока умножения, а последовательно включенные второй измеритель наклонной дальности и пятый блок умножения, второй вход которого соединен с выходом второго измерителя наклонной дальности, а выход подключен к четвертому входу четвертого сумматора, снабжено блоком запроса и ретранслятором, которые устанавливаются на воздушных судах, при этом блок запроса выполнен в виде последовательно включенных задающего генератора, частотного модулятора, второй вход которого соединен с выходом генератора пилообразного напряжения, первого усилителя мощности, первого дуплексера, вход-выход которого связан с первой приемопередающей антенной, второго усилителя мощности, перемножителя, второй вход которого соединен с выходом частотного модулятора, полосового фильтра, фазового детектора и блока регистрации, последовательно подключенных к выходу полосового фильтра удвоителя фазы, первого узкополосного фильтра, делителя фазы на два, второго узкополосного фильтра и частотомера, при этом второй вход фазового детектора соединен с выходом второго узкополосного фильтра, ретранслятор выполнен в виде последовательно включенных генератора псевдослучайной последовательности, фазового манипулятора, четвертого усилителя мощности, второго дуплексера, вход-выход которого связан с второй приемопередающей антенной, и третьего усилителя мощности, выход которого соединен с вторым входом фазового манипулятора.
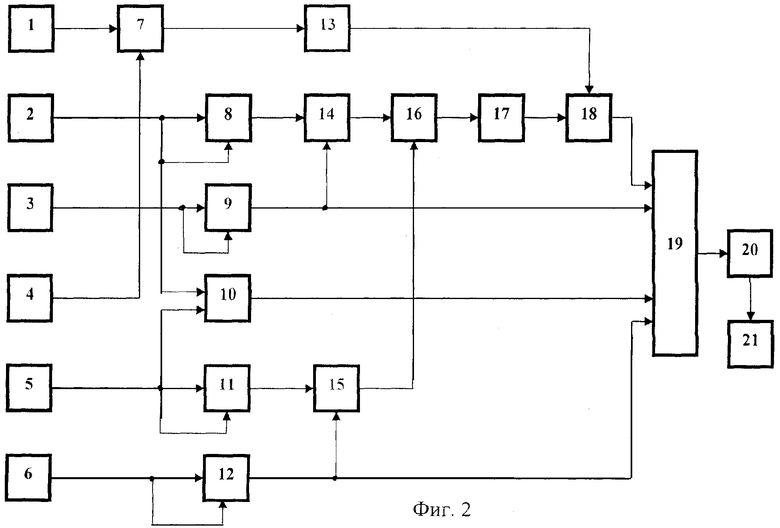
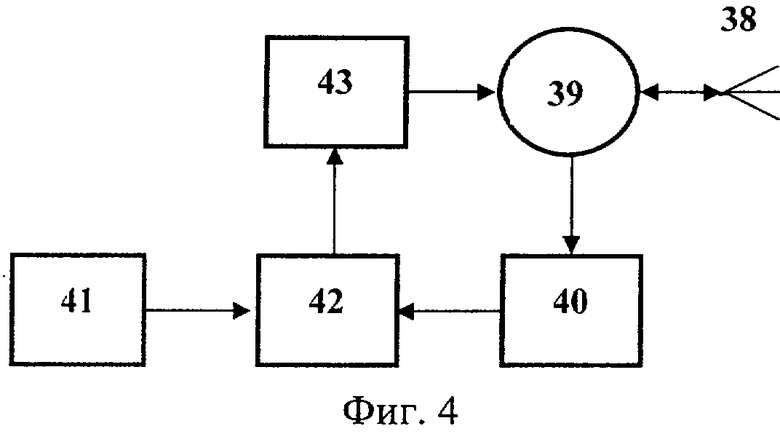
Геометрическая схема расположения двух воздушных судов BC1 и ВС2 и наземный автоматизированной системы управления воздушным движением изображена на фиг.1. Структурная схема устройства для определения расстояния между воздушными судами представлена на фиг.2. Структурная схема блока запроса изображена на фиг.3. Структурная схема ретранслятора изображена на фиг.4. Частотно-временные диаграммы, поясняющие работу блока запроса и ретранслятора, показаны на фиг.5.
Устройство для определения расстояния между воздушными судами содержит последовательно включенные первый измеритель 1 азимута, первый сумматор 7, второй вход которого соединен с выходом второго измерителя 4 азимута, блок 13 вычисления косинуса, седьмой блок 18 умножения, четвертый сумматор 19, второй блок 20 вычисления корня квадратного и индикатор 21, последовательно включенные первый измеритель 2 высоты, первый блок 8 умножения, второй вход которого соединен с выходом первого измерителя 2 высоты, второй сумматор 14, второй вход которого соединен с выходом второго блока 9 умножения, шестой блок 16 умножения, второй вход которого соединен с выходом третьего сумматора 15, и первый блок 17 вычисления корня квадратного, выход которого соединен со вторым входом седьмого блока 18 умножения, последовательно включенные первый измеритель 3 наклонной дальности и второй блок 9 умножения, второй вход которого соединен с выходом первого измерителя 3 наклонной дальности, а выход подключен ко второму входу четвертого сумматора 19, третий вход которого через третий блок 10 умножения соединен с выходом первого 2 и второго 5 измерителя высоты, последовательно включенные второй измеритель 5 высоты полета, четвертый блок 11 умножения, второй вход которого соединен с выходом второго измерителя 5 высоты, и третий сумматор 15, второй вход которого соединен с выходом пятого блока 12 умножения, последовательно включенные второй измеритель 6 наклонной дальности и пятый блок 12 умножения, второй вход которого соединен с выходом измерителя 6 наклонной дальности, а выход подключен к четвертому входу четвертого сумматора 19.
Блок запроса содержит последовательно включенные задающий генератор 22, частотный модулятор 24, второй вход которого соединен с выходом генератора 23 пилообразного напряжения, первый усилитель 25 мощности, первый дуплексер 26, вход-выход которого связан с первой приемопередающей антенной 27, второй усилитель 28 мощности, перемножитель 29, второй вход которого соединен с выходом частотного модулятора 24, полосовой фильтр 30, фазовый детектор 35 и блок 37 регистрации, последовательно подключенные к выходу полосового фильтра 30, удвоитель 31 фазы, первый узкополосный фильтр 32, делитель 33 фазы на два, второй узкополосный фильтр 34 и частотомер 36, при этом второй вход фазового детектора 35 соединен с выходом второго узкополосного фильтра 34.
Ретранслятор содержит последовательно включенные генератор 41 псевдослучайной последовательности (ПСП), фазовый манипулятор 42, четвертый усилитель 43 мощности, второй дуплексер 39, вход-выход которого связан с второй приемопередающей антенной 38, и третий усилитель 40 мощности, выход которого соединен с вторым входом фазового манипулятора 42.
Устройство работает следующим образом.
На наземной автоматизированной системе управления воздушным движением первый 1 и второй 4 измерители азимутов воздушных судов BC1 и ВС2 определяют азимуты α1 и α2 соответственно (фиг.1). Сигнал, пропорциональный азимуту первого BC1, поступает на первый вход первого сумматора 7, на второй вход которого поступает сигнал, пропорциональный азимуту второго BC2. Сигнал на выходе первого сумматора 7 пропорционален разности азимутов первого BC1 и второго ВС2: α1-α2. Этот сигнал поступает на вход блока 13 вычисления косинуса, на выходе которого сигнал пропорционален cos(α1-α2). Данный сигнал поступает на первый вход седьмого блока 18 умножения.
Первый 2 и второй 5 измерители высоты полета воздушных судов BC1 и ВС2 определяют высоты полета h1 и h2 соответственно. Сигнал h1, пропорциональный высоте полета первого BC1, поступает на первый и второй входы первого блока 8 умножения и на первый вход третьего блока 10 умножения. Сигнал, пропорциональный h1 2, с выхода первого блока 8 умножения поступает на первый вход второго сумматора 14.
Сигнал h2, пропорциональный высоте полета второго ВС2, поступает на первый и второй входы четвертого блока 11 умножения и на второй вход третьего блока 10 умножения. Сигнал, пропорциональный h2 2, с выхода четвертого блока 11 умножения поступает на второй вход третьего сумматора 15.
Первый 3 и второй 6 измерители наклонных дальностей до воздушных судов BC1 и ВС2 определяют наклонные дальности d1 и d2 соответственно. Сигнал d1, пропорциональный наклонной дальности до первого BC1, поступает на первый и второй входы второго блока 9 умножения, с выхода которого сигнал, пропорциональный d1 2, поступает на второй вход сумматора 14 и на второй вход четвертого сумматора 19.
Сигнал d2, пропорциональный наклонной дальности до второго ВС2, поступает на первый и второй входы пятого блока 12 умножения, с выхода которого сигнал, пропорциональный d2 2, поступает на второй вход третьего сумматора 15 и четвертый вход четвертого сумматора 19.
На выходе второго сумматора 14 сигнал пропорционален разности квадратов наклонной дальности d1 до первого воздушного судна BC1 и его высоты h1: d2 2-h2 2. Этот сигнал поступает на второй вход шестого блока 16 умножения, с выхода которого сигнал, пропорциональный
 ,
,
поступает на вход первого блока 17 вычисления корня квадратного, с выхода которого сигнал, пропорциональный
 ,
,
поступает на второй вход седьмого блока 18 умножения, на третий вход которого поступает сигнал, пропорциональный cos(α1-α2). С выхода седьмого блока 18 умножения сигнал, пропорциональный
 ,
,
поступает на первый вход четвертого сумматора 19.
На третий вход четвертого сумматора 19 поступает сигнал с выхода третьего блока 10 умножения, который пропорционален произведению высоты h1 первого воздушного судна BC1 и высоты h2 второго воздушного судна ВС2: h1·h2.
На выходе четвертого сумматора 19 сигнал пропорционален квадрату расстояния между первым BC1 и вторым ВС2 воздушными суднами:
 .
.
Этот сигнал поступает на вход второго блока 20 вычисления корня квадратного, с выхода которого сигнал
 ,
,
пропорциональный расстоянию между первым BC1 и вторым ВС2 воздушными суднами, поступает на индикатор 21 отображения воздушной обстановки и индицируется в формуляре сопровождения.
Одновременно на первом воздушном судне BC1 или на втором воздушном судне ВС2 задающим генератором 22 формируется высокочастотное колебание
uc(t)=Uccos(ωct+φc), 0≤t≤Tc,
где Uc, ωc, φc, Tc - амплитуда, несущая частота, начальная фаза и длительность высокочастотного колебания,
которое поступает на первый вход частотного модулятора 24, на второй вход которого подается модулирующее напряжение с выхода генератора 23 пилообразного напряжения. На выходе частотного модулятора 24 формируется сигнал с линейной частотной модуляцией (ЛЧМ)
u1(t)=Uccos(ωct+πγt2+φc), 0≤t≤Tc,
где  - скорость изменения частоты сигнала;
- скорость изменения частоты сигнала;
ΔωД - девиация частоты;
ТМ - период модуляции (фиг.5),
который через усилитель 25 мощности и дуплексер 26 поступает в приемопередающую антенну 27, излучается ею в эфир, улавливается приемопередающей антенной 38 ретранслятора, установленного на другом воздушном судне, и через дуплексер 39 и усилитель мощности 40 поступает на второй вход фазового манипулятора 42. На первый вход последнего подается псевдослучайная последовательность (ПСП) максимальной длительности или m-последовательностей. Эта m-последовательность генерируется с помощью регистра сдвига, охваченного логическими обратными связями. Обратная связь осуществляется путем сложения по модулю двух выходных напряжений двух или более каскадов и подачи результирующего напряжения на вход первого каскада.
На выходе фазового манипулятора 42 формируется сложный сигнал с комбинированной линейной частотой модуляции и фазовой манипуляцией (ЛЧМ-ФМн)
u2(t)=U2cos[ωct+πγt2+φk(t)], 0≤t≤Tc,
где φk(t)={0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующей ПСП.
При этом моделирующая ПСП определяется бортовым номером воздушного судна. Каждое воздушное судно имеет свой уникальный бортовой номер.
Сформированный сложный ЛЧМ-ФМн-сигнал с выхода фазового манипулятора 42 через усилитель 43 мощности и дуплексер 39 поступает в приемопередающую антенну 38, излучается ею в эфир, улавливается приемопередающей антенной 27 и через дуплексер 26 и усилитель 28 мощности поступает на первый вход перемножителя 29, на второй вход которого подается напряжение u1(t) с выхода частотного модулятора 24. На выходе перемножителя 29 образуется напряжение
u3(t)=U3cos[ωc(t-τз)+πγ(t-τз)2+φk(t-τ3/2)+φc],
где  ;
;
 - время запаздывания переизлученного сигнала относительно зондирующего (фиг.5);
- время запаздывания переизлученного сигнала относительно зондирующего (фиг.5);
R - расстояние между воздушными судами;
с - скорость распространения радиоволн;
ωи - частота излучаемого зондирующего сигнала;
ωп - частота переизлученного сигнала.
На выходе перемножителя 29 образуется напряжение
u4(t)=U4cos[ωБt+γk+φk(t-τз/2)+φБ], 0≤t≤Tc,
где  ;
;
ωБ=2πγτз - частота биений;
 ,
,
которое выделяется полосовым фильтром 30 и поступает на первый вход фазового детектора 35. Одновременно напряжение u4(t) с выхода полосового фильтра 30 поступает на вход удвоителя 31 фазы, на выходе которого образуется гармоническое напряжение
u5(t)=U5cos[2ωБt+2φБ], 0≤t≥Tc,
где  .
.
Так как 2φk(t-τз/2)={0,2π}, то в указанном напряжении фазовая манипуляция уже отсутствует.
В качестве удвоителя 31 фазы может использоваться перемножитель, на два входа которого подается один и тот же сигнал u4(t).
Гармоническое напряжение u5(t) выделяется узкополосным фильтром 32 и поступает на вход делителя 33 фазы на два, на выходе которого образуется гармоническое напряжение
u6(t)=U6cos(ωБt+φБ), 0≤t≤Tc.
Это напряжение выделяется узкополосным фильтром 34 и поступает на второй (опорный) вход фазового детектора 35 и на вход частотомера 36 (частотного анализатора).
На выходе фазового детектора 35 образуется низкочастотное напряжение
uH(t)=UHcosφk(t-τз/2), 0≤t≤Tc,
где  ;
;
пропорциональное псевдослучайной последовательности (ПСП). Это напряжение фиксируется блоком 37 регистрации.
Частотомер 36 отградуирован непосредственно в единицах дальности. Если дальность (расстояние между воздушными судами) становится меньше некоторого порога, то экипаж воздушного судна принимает соответствующее решение по обеспечению безопасности полета.
Максимальная дальность, которая может быть измерена частотным методом, определяется из условия  откуда
откуда  .
.
Минимальная частота спектра биений, которая может быть зафиксирована спектр-анализатором (частотомером 36), равна частоте модуляции
 . Следовательно, минимальная дальность (расстояние между воздушными судами), измеряемая частотным методом, равна
. Следовательно, минимальная дальность (расстояние между воздушными судами), измеряемая частотным методом, равна  .
.
Разрешающая способность частотного дальномера определяется минимальной разностью частот биений, которая может быть зафиксирована частотомером 36. Она, как уже отмечалось, равна FM. Этой разности соответствует разрешаемое расстояние  .
.
Таким образом, предлагаемое устройство по сравнению с прототипом обеспечивает автономное определение расстояния между воздушными судами частотным методом с использованием линейной частотной модуляции. Кроме того, предлагаемое устройство позволяет определять бортовой номер приближающегося воздушного судна путем использования сложных сигналов с комбинированной линейной частотной модуляцией и фазовой манипуляцией (ЛЧМ-ФМн), обеспечивая тем самым дублирование и повышение безопасности воздушного движения. Следовательно, функциональные возможности устройства расширены.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ВОЗДУШНЫМИ СУДАМИ | 2006 |
|
RU2309424C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ВОЗДУШНЫМИ СУДАМИ | 2007 |
|
RU2346293C2 |
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2309431C1 |
| СИСТЕМА ДЛЯ РАДИОТЕЛЕФОННЫХ СООБЩЕНИЙ НА АВТОМАГИСТРАЛЯХ | 2011 |
|
RU2471244C1 |
| УГЛОМЕСТНО-ВРЕМЕННАЯ ДОПЛЕРОВСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2008 |
|
RU2368550C1 |
| АВАРИЙНЫЙ РАДИОБУЙ | 2005 |
|
RU2282870C1 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ НЕСАНКЦИОНИРОВАННОГО ПЕРЕДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2348552C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ДВИЖЕНИЯ СПЕЦИАЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2582502C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ НЕСАНКЦИОНИРОВАННОГО ИСПОЛЬЗОВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2446481C2 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 2007 |
|
RU2339925C1 |



Предлагаемое устройство относится к области авиационной техники и предназначено для определения расстояния между воздушными судами в полете. Достигаемый технический результат изобретения - расширение функциональных возможностей устройства путем автономного дублирования при определении расстояния между воздушными судами и бортового номера приближающегося воздушного судна. Заявленное устройство содержит наземную автоматизированную систему управления воздушным движением, бортовые блок запроса и ретранслятор. Наземная автоматизированная система управления воздушным движением содержит два измерителя азимута, два измерителя высоты, два измерителя наклонной дальности, четыре сумматора, семь блоков умножения, два блока вычисления корня квадратного, блок вычисления косинуса и индикатор, определенным образом соединенные между собой. Блок запроса содержит задающий генератор, генератор пилообразного напряжения, частотный модулятор, два усилителя мощности, первый дуплексер, первую приемопередающую антенну, перемножитель, полосовой фильтр, удвоитель фазы, два узкополосных фильтра, делитель фазы на два, фазовый детектор, частотомер и блок регистрации, определенным образом соединенные между собой. Ретранслятор содержит вторую приемопередающую антенну, второй дуплексер, два усилителя мощности, генератор псевдослучайной последовательности и фазовый манипулятор, также определенным образом соединенные между собой. 5 ил.
Устройство для определения расстояния между воздушными судами, содержащее на наземной автоматизированной системе управления воздушным движением последовательно включенные первый измеритель азимута, первый сумматор, второй вход которого соединен с выходом второго измерителя азимута, блок вычисления косинуса, седьмой блок умножения, четвертый сумматор, второй блок вычисления корня квадратного и индикатор, последовательно включенные первый измеритель высоты, первый блок умножения, второй вход которого соединен с выходом первого измерителя высоты, второй сумматор, второй вход которого соединен с выходом второго блока умножения, шестой блок умножения, второй вход которого соединен с выходом третьего сумматора, и первый блок вычисления корня квадратного, последовательно включенные первый измеритель наклонной дальности и второй блок умножения, второй вход которого соединен с выходом первого измерителя наклонной дальности, а выход подключен ко второму входу четвертого сумматора, третий вход которого через третий блок умножения соединен с выходами первого и второго измерителей высоты, последовательно включенные второй измеритель высоты, четвертый блок умножения, второй вход которого соединен с выходом второго измерителя высоты, и третий сумматор, второй вход которого соединен с выходом пятого блока умножения, последовательно включенные второй измеритель наклонной дальности и пятый блок умножения, второй вход которого соединен с выходом второго измерителя наклонной дальности, а выход подключен к четвертому входу четвертого сумматора, с выхода которого сигнал, пропорциональный расстоянию между воздушными судами, поступает на индикатор отображения воздушной обстановки и индицируется в формуляре сопровождения, отличающееся тем, что оно снабжено блоком запроса и ретранслятором, которые устанавливаются на воздушных судах с возможностью обеспечения автономного дублирования при определении расстояния между этими судами и бортового номера приближающегося воздушного судна, при этом блок запроса выполнен в виде последовательно включенных задающего генератора, частотного модулятора, второй вход которого соединен с выходом генератора пилообразного напряжения, первого усилителя мощности, первого дуплексера, вход-выход которого связан с первой приемопередающей антенной, второго усилителя мощности, перемножителя, второй вход которого соединен с выходом частотного модулятора, полосового фильтра, фазового детектора и блока регистрации, последовательно подключенных к выходу полосового фильтра удвоителя фазы, первого узкополосного фильтра, делителя фазы на два, второго узкополосного фильтра и частотомера, отградуированного в единицах дальности, при этом второй вход фазового детектора соединен с выходом второго узкополосного фильтра, ретранслятор выполнен в виде последовательно включенных генератора псевдослучайной последовательности, при этом модулирующая псевдослучайная последовательность определяется бортовым номером воздушного судна, фазового манипулятора, четвертого усилителя мощности, второго дуплексера, вход-выход которого связан с второй приемопередающей антенной, и третьего усилителя мощности, выход которого соединен с вторым входом фазового манипулятора, при этом разрешаемая минимальная дальность между воздушными судами определяется как ΔR=с/4ΔωД, где с - скорость распространения радиоволн, ΔωД - девиация частоты излучаемого блоком запроса сигнала.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ВОЗДУШНЫМИ СУДАМИ | 2003 |
|
RU2256195C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ВОЗДУШНЫМИ СУДАМИ | 2006 |
|
RU2309424C1 |
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2309431C1 |
| Способ нанесения композиционного покрытия на деталь из инструментальной стали | 2020 |
|
RU2756960C1 |
| US 4188630 A, 12.02.1980 | |||
| Каталитический генератор теплоты и способ регулирования его мощности | 2016 |
|
RU2626043C1 |
| Поляризованное реле с магнитным самоудерживанием | 1957 |
|
SU115119A1 |
| US 2003125849 A1, 03.07.2003. | |||

