Область техники
Настоящее изобретение касается способа и устройства для определения местоположения дефектов, расположенных внутри погруженной пустой конструкции. Этот способ применяется именно, но не исключительно, при обслуживании подводных "трубопроводов", жестких или гибких, по которым осуществляется доставка масел или газа от мест их производства до мест хранения или распределения, и при идентификации подводных кабелей.
Предшествующий уровень техники
Известно, что подводный "трубопровод" представляет собой металлическую оболочку, составленную из частей стальной трубы, с внешней защитой из бетона. Части имеют длину около 12 метров и внешний диаметр, в основном, находящийся в диапазоне от 12 дюймов до 36 дюймов, которые соединены между собой сваркой. Покрытие из бетона, осуществляющего защиту металлической оболочки, имеет толщину в диапазоне от 2 до 5 сантиметров.
Сварка металлических частей и покрытие оболочки бетоном осуществляется внутри укладчика "трубопроводов", который непрерывно опускает "трубопровод" в глубину морской среды, согласно предварительно определенному пути, проконтролированному в абсолютных значениях системой позиционирования.
К тому же "трубопроводы" могут быть уложены не прямолинейно, по причинам, связанным с рельефом поверхности морского дна, которое не обязательно горизонтально; могут присутствовать и другие "трубопроводы", что является препятствием, которое нужно огибать или размещать "трубопровод" над ним.
Идентификация каждого из подводных "трубопроводов" или подводных кабелей, необходимая для обеспечения их обслуживания, осуществляется при помощи вспомогательных пассивных элементов, таких как металлические пластинки, пронумерованные или имеющие различные цвета, или при помощи активных элементов, таких как акустические маяки с электропитанием от батарей.
Пассивные устройства, в общем, быстро покрываются конкрециями, что создает трудности, даже невозможность чтения, а активные устройства имеют ограниченную эффективность, учитывая автономность электропитания.
К тому же известно, что обслуживанию подводных "трубопроводов" предшествует визуальный и иногда рентгеновский контроль металлической оболочки при помощи робота, двигающегося внутри "трубопровода".
Он может обнаружить, таким образом, дефекты, такие как коррозия металла оболочки, повреждение сварного шва, соединяющего две части оболочки, деформация металлической оболочки, спровоцированная случайным перемещением "трубопровода". Эта информация может быть запомнена самим роботом или передана в реальном времени на станцию контроля, при помощи связующего омбиликального провода.
Определение местоположения вероятных дефектов осуществлено с использованием швов между частями на основе подсчета швов от начала, когда система подсчета присоединена к исследуемому "трубопроводу".
Таким образом, определение местоположения дефекта, зафиксированного роботом наблюдения, на уровне шва N, или дефекта, зафиксированного между швом N и швом N+1, может быть осуществлено с внешней стороны, во втором заходе, идентичным подсчетом швов, от того же начала, предполагая, что эти дефекты косвенно проявятся со стороны материала бетонного покрытия на уровне указанных швов.
Эти операции внутреннего контроля подводных "трубопроводов" дорогостоящие, учитывая используемые средства, и приводят к дополнительным затратам отвлечения указанных средств, а также к эксплуатационным потерям, связанным с мгновенной остановкой перекачки продукции.
Следовательно, определение местоположения вероятных повреждений должно быть точным и должно исключать ошибки.
Указанные выше средства идентификации позвляют только частично исключить риск ошибки.
Краткое изложение существа изобретения
Технической задачей настоящего изобретения является устранение указанных недостатков, т.е. - исключение риска ошибки при определении места повреждения или дефекта.
Согласно изобретению, предложен способ внешнего определения местоположения дефектов в погруженной пустой конструкции, причем указанные дефекты были предварительно обнаружены устройством, передвигающимся внутри упомянутой погруженной пустой конструкции, и позиционированы, начиная от начала, путем подсчета числа меток, расположенных на одинаковом расстоянии, доступных изнутри и снаружи вышеупомянутой погруженной пустой конструкции, заключающийся в том, что
определяют путем подсчета, начиная с того же начала, метку, доступную снаружи погруженной пустой структуры,
позиционируют модуль радиоответчика на указанной метке,
идентифицируют модуль радиоответчика кодом идентификации,
определяют число меток, отделяющих указанные дефекты и модуль идентифицированого радиоответчика.
Эта относительная система отсчета для "трубопровода" не составляет системы отсчета позиционирования в абсолютных значениях для указанного "трубопровода". Должны быть введены в действие другие средства, позволяющие определить топографическую связь между этой системой отсчета, относящейся к "трубопроводу", и системой позиционирования в абсолютных значениях на доступной площади.
Таким образом, система отсчета для "трубопровода" образована посредством меток, таких как швы, соединяющие различные части, которые заметны непосредственно внутри металлической оболочки, и косвенно снаружи "трубопровода", составляет суть опорной сравнительной системы отсчета, относящейся к исследуемому "трубопроводу".
Для большей точности идентификация системы отсчета относительно "трубопровода", на основе меток, доступных изнутри и извне, являющихся в данном случае швами, соединяющими части, осуществлена при помощи радиоответчиков, которые воспринимают код идентификации.
Таким образом, радиоответчики будут механически взаимосвязаны с "трубопроводом» вблизи всех N швов (N - равно или больше 1), при этом каждый из указанных радиоответчиков содержит, по меньшей мере, код идентификации, присущий "трубопроводу" и шву, ассоциированному с соответствующим радиоответчиком.
Устройство дистанционного считывания сигнала маломощного радиоответчика содержит средства приема, соединенные с приемной антенной, чтобы уловить на расстоянии сигнал от радиоответчика, когда он расположен вблизи от него, и средства, чтобы обработать полученный сигнал и чтобы предоставлять информацию, соответствующую полученному сигналу, что позволит без риска ошибки идентифицировать шов, ассоциированный с указанным радиоответчиком.
Благодаря этим устройствам подсчет швов, осуществленный во время внутреннего исследования "трубопровода", позволяет фиксировать вероятный дефект, в сочетании с внешней идентификацией швов, осуществленной считыванием кода идентификации соответствующего радиоответчика, что позволит определить снаружи местоположение дефекта, обнаруженного изнутри.
Согласно изобретению, устройство считывания содержит средства ввода информации, соответствующей полученному сигналу, и средства дистанционной передачи кода идентификации, считанного на приемной станции, включающей информационный терминал.
Согласно изобретению, устройство считывания содержит средство записи информации в регистрационную и считываемую память радиоответчика, а также характеристик обслуживания, условий, в которых были осуществлены операции обслуживания.
Чтение и запись информации в регистрационную и считываемую память радиоответчика смогут быть осуществлены в месте погружения, но также и предварительно на площадке до погружения указанного радиоответчика. В этом случае в память радиоответчика должны быть записаны данные, определяющие первоначальные условия, присущие погружаемой конструкции, именно до ее погружения.
Предпочтительно, что эксплуатационные частоты для считывания и записи информации в регистрационную и считываемую память радиоответчика нормализованы применительно к свободному распространению в воздухе, т.е. 125 кГц и 134 кГц. С учетом того, что в морской среде никакая нормализация не осуществляется мгновенно, эксплуатационные частоты будут ниже, предпочтительно в той степени, чтобы благоприятствовать распространению магнитной составляющей электромагнитного поля, генерированного устройством считывания и записи, эксплуатационные частоты выбраны в диапазоне от 1 кГц до 50 кГц.
Что касается мощностей, генерируемых устройством считывания и записи, они находятся в диапазоне от 1 Вт до 100 Вт, преимущественно от 4 Вт до 20 Вт.
В качестве примера функциональные характеристики могут быть следующими:
частота 125 кГц; мощность 4 Вт; расстояние считывания и записи, отделяющей устройство считывания и записи радиоответчика, 50 см.
Представляется выгодным, чтобы использовались следующие способы крепления радиоответчика на погруженной пустой конструкции на месте: склеивание, использование ремней или использование открытых хомутов; в ходе монтажа на заводе, способом крепления будут главным образом соединение типа болт, зафиксированный или утопленный в защитной оболочке пустой конструкции из бетона или в смоле.
Краткое описание чертежей
В дальнейшем способ, согласно изобретению, поясняется описанием предпочтительного варианта выполнения со ссылками на сопровождающие чертежи, в которых:
фиг.1 изображает блок-схему последовательности операций способа определения местоположения дефектов внутри погруженной пустой конструкции, согласно изобретению;
фиг.2 - первый вариант закрепления радиоответчика на конструкции, согласно изобретению;
фиг.3 - второй вариант закрепления радиоответчика на конструкции, согласно изобретению;
фиг.4 - блок-схему радиоответчика, согласно изобретению;
фиг.5 - блок-схему устройства считывания и записи, согласно изобретению;
фиг.6 - упрощенную схему системы контроля подводного "трубопровода".
Описание предпочтительного варианта воплощения изобретения
Способ определения местоположения дефектов внутри погруженной пустой конструкции (фиг.1) осуществляется следующим образом.
Определяют первоначальную метку (блок 1), позволяющую приписать одно и то же начало для фаз внутреннего наблюдения конструкции и внешнего определения местоположения вероятного дефекта конструкции.
Проводят внутреннее наблюдение конструкции и подсчет меток (блок 2).
Проводят тест на наличие дефекта (блок 3) и, если:
нет никакого дефекта, проверяют осуществлен ли тестовый пробег (блок 4); если "да", то конец процесса, если "нет", то продолжение процесса и возвращение (блок 2);
если дефект есть, проводят следующие этапы:
позиционируют отмеченный дефект (блок 5) либо в соседстве метки N, либо между метками N и N+1,
запоминают номера меток, соответствующих отмеченным дефектам (блок 6),
проверяют, осуществлен ли тестовый пробег (блок 7), если "да", то конец процесса, если "нет", то продолжение процесса и возвращение (блок 2).
Так же, как было определено раньше, вышеупомянутые метки доступны для обнаружения как изнутри, так и снаружи. В данном случае это швы, соединяющие части подводного "трубопровода". Вблизи от каждого шва N (N - равно или более 1), с внешней оболочкой "трубопровода" механически сопряжены радиоответчики.
Защиту металлических частей обеспечивает оболочка, выполненная из бетона; здесь могут представиться два случая:
"трубопровод" погружен и закрепление радиоответчика должно осуществиться на месте,
"трубопровод" находится в процессе укладки и закрепление радиоответчика можно осуществить в течение операции формирования слоя бетона.
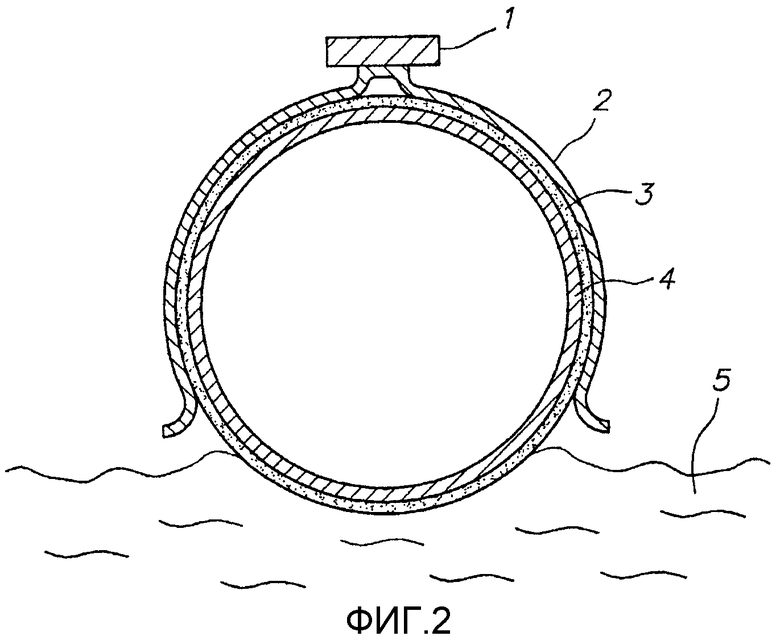
В примере, изображенном на фиг.2, "трубопровод", представленный в разрезе, состоит из металлической оболочки 4, покрытой слоем бетона 3. Сборка располагается на дне моря 5. Позиционирование радиоответчика должно, следовательно, быть осуществлено на месте.
Радиоответчик 1 прикреплен хомутом 2, выполненным из гибкого материала, устойчивого к действию морской воды. Хомут вследствие своей гибкости позволяет фиксировать радиоответчик 1 рядом со швом, соединяющим две части, входящие в состав металлической оболочки 4.
К тому же радиоответчик 1 будет зафиксирован рядом с верхней образующей «нефтепровода», что облегчит считывание кода идентификации радиоответчика и, следовательно, соответствующего шва.
В примере на фиг.3 "трубопровод", представленный в разрезе, содержит металлическую оболочку 4, покрытую бетонным слоем 3. Сборка располагается в глубине (на дне) моря 5, нанесение бетонного покрытия было осуществлено предварительно на борту укладчика "трубопровода".
В этом случае радиоответчик 1 будет содержать узел 2 закрепления, позволяющий зафиксировать радиоответчик на «трубопроводе» в процессе образования бетонного покрытия.
В примере на фиг.4 видно, что радиоответчик содержит
процессор, предназначенный для управления перифериями:
память ROM 2 для хранения инструкций TOPERATING SYSTEM;
память RAM 3 для временного хранения данных в течение операции считывания и записи;
типовую память EEPROM 4 для считывания и записи данных идентификации;
интерфейс коротковолнового приемопередатчика 5;
антенну 6.
Радиоответчики, согласно изобретению, преимущественнно могут быть пассивного типа. Активные радиоответчики снабжены электрическим источником энергии и, следовательно, имеют ограниченный срок автономной службы.
В случае использования пассивных радиоответчиков электромагнитная энергия, излученная устройством считывания и записи и принятая антенной радиоответчика, позволяет подавать электроэнергию на различные органы радиоответчика.
Частоты эксплуатации, разрешенные для радиоответчиков, следующие: 125 кГц, 13,56 МГц, 433 МГц 2,45 ГГц, а также полоса 860-926 МГц. В данном случае, учитывая нахождение радиоответчика в водяной среде, несущая частота составляет 125 кГц; мощность излучения устройства прочтения и записи близка к 4 Вт. Эти характеристики позволяют принять сигнал радиоответчика на расстоянии около 50 см, и записывать данные в память радиоответчика на расстоянии, близком к этому.
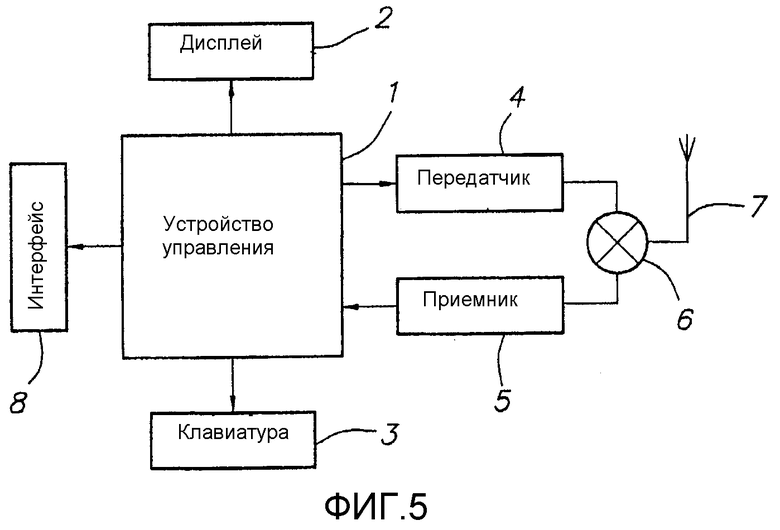
В примере на фиг.5 устройство считывания и записи содержит устройство управления 1, экран для визуального вывода информации 2, клавиатуру 3 записи, коротковолновой передатчик 4 мощности, коротковолновой приемник 5 в большом кожухе, переключатель 6 «прием - передача», антенну 7, интерфейс 8 внешней связи.
Указанные элементы запитаны либо от автономной электрической батареи, либо от внешнего электрического источника энергии через кабель, который связан с источником энергии, расположенным на борту здания на площадке обслуживания или на борту подводного робота, осуществляющего инспекцию погруженных конструкций.
Таким образом, элементы 4, 5, 6, 7 составляют сторону «передатчик», а элементы 1, 2, 3, 8 составляют сторону «считывание/запись».
Интерфейс 8 позволяет сообщаться с центром управления, ответственным вести операции обслуживания.
В примере на фиг.6 представлена схема подводного "трубопровода" и оборудование, используемое при его обслуживании.
Изображение выполнено в произвольном масштабе для облегчения описания схематической структуры системы контроля подводного "трубопровода".
"Трубопровод" PL расположен на дне моря и погружен в море, начиная от терминала ТЕ. Именно это позволяет проникнуть внутрь "трубопровода", чтобы осуществлять обслуживание.
В данном случае робот наблюдения и, в случае необходимости, радиографии RTE, например, типа: "ROV" ("Remotely Operated Vehicle"), находится внутри "нефтепровода" и соединен проводом СТЕ со станцией контроля и управления роботом RTE, расположенной в терминале ТЕ; провод CTE содержит цепи снабжения электроэнергией, телекомандную связь с пультом, а также кабель камеры видеосвязи, когда она устанавливается в погруженной камере.
Множество радиоответчиков T0, T1, T2... TN... TP, T(P+1)... расположено на оболочке "трубопровода" PL, вблизи от соответствующих швов, соединяющих металлические части.
Судно обслуживания BM, плавающее над "трубопроводом", контролирует передвижение подводного робота RBM, при помощи провода СВМ; робот RBM несет на себе, в частности, камеру внешнего наблюдения, позволяющую осматривать "трубопровод", и устройство DBM записи и считывания.
Судно обслуживания BM и терминал ТЕ соединены радиочастотной связью при помощи спутника телекоммуникации ST и их соответствующих антенн АВМ, ATE, AST.
Благодаря развертыванию этих средств оказывается возможным вмешиваться в реальном времени в процессе поиска на подводном "трубопроводе" видимого внутри дефекта "трубопровода".
Совокупность собранной информации хранится в центре управления на борту судна обслуживания BM.
К тому же подводный робот RBM сможет записывать в различные радиоответчики информацию, по ходу операции обслуживания, а именно:
- ссылку на клиента,
- географические координаты: долготу, широту,
- глубину,
- артикул "трубопровода": дату установки, номер шва...
- ссылку на обследование: название робота, дату...
и передавать в центр управления данные обследования (дата, час обследования, отмечая данные, зафиксированные радиоответчиком...), условия обследования (температура, соленость, pH), и другие существенные данные.
Способ, согласно изобретению, определения местоположения дефектов, расположенных внутри погруженной пустой конструкции, позволяет осуществлять операции обслуживания, при этом
- риск ошибок почти нулевой,
- времена вмешательства сокращены и, следовательно, сокращены затраты на простой, а эксплуатационные потери минимальные.
Эксплуатация радиоответчиков, установленных в соответствующих местах, позволяет получать более полную информацию об условиях обслуживания и формирование баз данных, гарантирующих лучшее качество операций обслуживания.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАБОР ИЗ АРМИРОВАНИЯ ДЛЯ БЕТОНА И МЕТОК | 2008 |
|
RU2469159C2 |
| ФОРМИРОВАНИЕ, ФИКСАЦИЯ И ИСПОЛЬЗОВАНИЕ МЕТОК ВИЗУАЛЬНОЙ ИДЕНТИФИКАЦИИ ДЛЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2011 |
|
RU2596997C2 |
| СПОСОБ И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ МЯСНЫМИ ПРОДУКТАМИ | 2002 |
|
RU2301433C2 |
| СПОСОБ КОНТРОЛЯ КОРРОЗИОННЫХ ПРОЦЕССОВ | 2017 |
|
RU2648198C1 |
| СИСТЕМА И СПОСОБ ДЛЯ ОТСЛЕЖИВАНИЯ ИЗДЕЛИЙ В ЦЕПОЧКЕ ПОСТАВОК ИЛИ ЦЕННОСТЕЙ БЕЗ ОБРАТНОЙ СВЯЗИ | 2016 |
|
RU2728797C2 |
| СИСТЕМА ИДЕНТИФИКАЦИИ И ПОЗИЦИОНИРОВАНИЯ МЕТОК В УЧЕБНОМ ЗАВЕДЕНИИ | 2023 |
|
RU2814844C1 |
| Роботизированное устройство для обслуживания клиентов | 2016 |
|
RU2629172C1 |
| СИСТЕМА СБОРА И ПЕРЕДАЧИ ИДЕНТИФИКАЦИОННЫХ ДАННЫХ | 2023 |
|
RU2815605C1 |
| Информационная система для городской среды на основе высокочастотной беспроводной связи с малым радиусом действия | 2016 |
|
RU2615318C1 |
| СПОСОБ ПОДГОТОВКИ И ОБСЛУЖИВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2011 |
|
RU2549140C2 |



Изобретение относится к области определения местоположения дефектов в погруженной пустой конструкции, в частности подводном трубопроводе. Способ внешнего определения местоположения дефектов, расположенных в погруженной пустой конструкции PL, которые были предварительно обнаружены устройством RTE, передвигающимся внутри погруженной пустой конструкции, и позиционированы подсчетом расположенных на равных интервалах меток, начиная от начальной, доступных изнутри и снаружи погруженной пустой конструкции PL, заключающийся в том, что определяют подсчетом, начиная с начала, метку, доступную снаружи погруженной пустой конструкции;
позиционируют модуль радиоответчика Т на метке, идентифицируют модуль радиоответчика Т кодом идентификации;
определяют число меток, отделяющих вышеупомянутые дефекты и вышеупомянутый модуль идентифицированого радиоответчика Т.
Кроме того, изобретение относится к устройству для осуществления способа, предназначенному для определения местоположения дефектов извне, расположенных в пустой погруженной конструкции (PL), которые предварительно были обнаружены подвижным устройством (RTE) внутри погруженной пустой конструкции (PL), и позиционированы подсчетом от начальной метки количества меток, расположенных на одинаковых интервалах, доступных изнутри и снаружи погруженной пустой конструкции (PL), которое содержит средства определения подсчетом метки, доступной снаружи пустой погруженной конструкции (PL), начиная от той же самой начальной метки, средства позиционирования модуля радиоответчика (Т) на вышеупомянутой метке, средства идентификации модуля радиоответчика (Т) кодом идентификации, средства определения числа меток, отделяющих дефекты и модуль идентифицированного радиоответчика (Т). Техническим результатом изобретения является снижение риска ошибки в опредении места повреждения или дефекта. 2 н. и 13 з.п. ф-лы, 6 ил.
a) определяют количество меток, доступных снаружи погруженной пустой конструкции, начиная от одной и той же начальной метки,
b) позиционируют модуль радиоответчика (Т) на указанной метке,
c) идентифицируют модуль радиоответчика (Т) с использованием идентифицирующего кода,
d) определяют количество меток, отделяющих дефекты и модуль идентифицированного радиоответчика (Т).
a) средства определения подсчетом метки, доступной снаружи пустой погруженной конструкции (PL), начиная от той же самой начальной метки,
b) средства позиционирования модуля радиоответчика (Т) на вышеупомянутой метке,
c) средства идентификации модуля радиоответчика (Т) кодом идентификации,
d) средства определения числа меток, отделяющих дефекты и модуль идентифицированного радиоответчика (Т).
| US 6243657 A, 05.06.2001 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ПОРЫВА ПОДВОДНОГО ТРУБОПРОВОДА | 2001 |
|
RU2196931C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА И ХАРАКТЕРНОГО РАЗМЕРА ТЕЧИ В ПОДЗЕМНОМ ТРУБОПРОВОДЕ | 2002 |
|
RU2213292C1 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ НАВИГАЦИОННОЙ ГИДРОАКУСТИЧЕСКОЙ СИСТЕМЫ ПОДВОДНЫМИ АППАРАТАМИ С ОПРЕДЕЛЕНИЕМ МЕСТА ПО РАЗНОСТЯМ РАССТОЯНИЙ ДО ВЕДУЩЕГО ПОДВОДНОГО АППАРАТА И МАЯКОВ-ОТВЕТЧИКОВ | 2005 |
|
RU2285273C1 |
| US 6553322 A, 22.04.2003 | |||
| Стенд для отладки настроечных параметров добычной машины | 1980 |
|
SU989353A1 |

