Изобретение относится к области морской навигации, в частности к способу определения места автономного подводного аппарата относительно точки на дне моря, например, при выполнении научно-исследовательских, поисковых и других работ под водой.
В морской навигации известен способ использования навигационной гидроакустической системы группой автономных подводных аппаратов, основанный на определении места автономного подводного аппарата относительно точки на дне моря, обозначенной тремя или более донными гидроакустическими маяками навигационной гидроакустической системы, в котором путем измерения на борту подводного аппарата разностей моментов времени приема акустических сигналов, синхронно излучаемых маяками навигационной гидроакустической системы, работающей по непрерывной программе, определяются разности расстояний до маяков. Место подводного аппарата находится как точка пересечения гиперболоидов вращения, в фокусах которых находятся маяки [1].
Однако этот способ имеет следующие недостатки. Практика показывает, что излучение акустических сигналов по непрерывной программе, без запроса, приводит к существенному сокращению срока службы маяков из-за нерационального расходования их энергоресурса, что вызывает сокращение срока работы навигационной гидроакустической системы. Кроме того, из-за нестабильности опорных генераторов и возникающих погрешностей формирования интервалов времени в маяках нарушается синхронность излучения акустических сигналов маяками, что увеличивает погрешности определения места автономного подводного аппарата и вызывает сокращение срока работы навигационной гидроакустической системы.
Наиболее близким техническим решением является способ использования навигационной гидроакустической системы группой автономных подводных аппаратов, основанный на определении места автономного подводного аппарата относительно точки на дне моря, обозначенной двумя или более донными гидроакустическими маяками-ответчиками навигационной гидроакустической системы, в котором путем измерения времени распространения акустического сигнала от подводного аппарата до маяков-ответчиков навигационной гидроакустической системы и обратно определяются расстояния до маяков-ответчиков. Место аппарата находится как точка пересечения сфер, центры которых расположены в точках установки маяков-ответчиков, а радиусы равны наклонным расстояниям от маяков-ответчиков до аппарата [2] - прототип.
Однако при групповых действиях автономных подводных аппаратов в одном районе работ использование маяков-ответчиков этим способом затруднено из-за появления взаимных помех. Кроме того, маяки-ответчики излучают сигналы на запросы каждого подводного аппарата, что также приводит к нерациональному расходованию энергоресурса маяков-ответчиков и сокращает срок работы навигационной гидроакустической системы.
Техническим результатом предложенного способа является увеличение срока работы навигационной гидроакустической системы при групповых действиях автономных подводных аппаратов в одном районе работ за счет сокращения числа посылок сигналов ответа маяков-ответчиков путем одновременного определения места всех подводных аппаратов группы при опросе маяков-ответчиков одним из подводных аппаратов группы (ведущим).
Технический результат достигается тем, что место ведущего автономного подводного аппарата определяется известным способом, в котором путем измерения времени распространения акустического сигнала от подводного аппарата до маяков-ответчиков навигационной гидроакустической системы и обратно определяются расстояния до маяков-ответчиков. Место ведущего аппарата находится как точка пересечения сфер, центры которых расположены в точках установки маяков-ответчиков, а радиусы равны наклонным расстояниям от маяков-ответчиков до аппарата. На остальных (ведомых) автономных подводных аппаратах группы осуществляется прием сигнала запроса ведущим подводным аппаратом маяков-ответчиков и сигналов ответа маяков-ответчиков. Место каждого ведомого подводного аппарата определяется по разностям сумм расстояний от ведущего подводного аппарата до каждого маяка-ответчика и от каждого маяка-ответчика до ведомого подводного аппарата и расстояния от ведущего до ведомого подводных аппаратов, определенных путем измерения на борту ведомого подводного аппарата разностей моментов времени приема акустических сигналов запроса маяков-ответчиков ведущим подводным аппаратом и ответов маяков-ответчиков, и известным на борту ведомого автономного подводного аппарата расстоянию до ведущего подводного аппарата и направления на него. Место ведомого аппарата находится как точка пересечения эллипсоидов, число которых соответствует числу маяков-ответчиков, один из фокусов которых расположен в точке установки соответствующего маяка-ответчика, а второй фокус расположен относительно первого по направлению, параллельному направлению с ведущего на ведомый подводные аппараты, и на расстоянии, равном расстоянию между ведущим и ведомым подводными аппаратами.
Сопоставимый анализ заявляемого технического решения с прототипом показывает, что заявляемый способ отличается от известного тем, что излучение сигналов запроса маяков-ответчиков осуществляется только одним подводным аппаратом группы, но при этом производится определение мест всеми подводными аппаратами группы. Место каждого ведомого подводного аппарата определяется по разностям сумм расстояний от ведущего подводного аппарата до каждого маяка-ответчика и от каждого маяка-ответчика до ведомого подводного аппарата и расстояния от ведущего до ведомого подводных аппаратов, определенных путем измерения на борту ведомого подводного аппарата разностей моментов времени приема акустических сигналов запроса маяков-ответчиков ведущим подводным аппаратом и ответов маяков-ответчиков, и известным на борту ведомого автономного подводного аппарата расстоянию до ведущего подводного аппарата и направления на него. Место ведомого аппарата находится как точка пересечения эллипсоидов, число которых соответствует числу маяков-ответчиков. Таким образом, заявляемый способ соответствует критерию изобретения "новизна".
В предлагаемом способе для обеспечения действий группы автономных подводных аппаратов требуется меньшее количество посылок акустических сигналов маяков-ответчиков за счет того, что однократное определение мест всех подводных аппаратов группы производится по однократным посылкам акустического сигнала маяками-ответчиками. Это позволяет сделать вывод о его соответствии критерию "изобретательский уровень".
Предлагаемый способ использования навигационной гидроакустической системы группой автономных подводных аппаратов может быть реализован следующим образом.
Определения мест подводных аппаратов производят аппаратурой потребителя навигационной гидроакустической системы СНП-10. Предварительно осуществляется модернизация аппаратуры потребителя навигационной гидроакустической системы подводных аппаратов таким образом, чтобы иметь возможность использовать ее в двух режимах: «ведущий», в котором в аппаратуре счетчики времени прохождения сигналов запускаются в момент излучения аппаратурой сигнала запроса маяков-ответчиков и останавливаются каждый в моменты приема сигналов ответа соответствующего маяка-ответчика, что позволит определить место подводного аппарата известным способом путем измерения времени распространения акустического сигнала от подводного аппарата до маяков-ответчиков навигационной гидроакустической системы и обратно и определения расстояния до маяков-ответчиков и «ведомый», в котором в аппаратуре счетчики времени прохождения сигналов запускаются в момент приема сигнала запроса маяков-ответчиков ведущим подводным аппаратом и останавливаются каждый в моменты приема сигналов ответа соответствующего маяка-ответчика, что позволит определить место подводного аппарата по разностям сумм расстояний от ведущего подводного аппарата до каждого маяка-ответчика и от каждого маяка-ответчика до ведомого подводного аппарата и расстояния от ведущего до ведомого подводных аппаратов, определенных путем измерения на борту ведомого подводного аппарата разностей моментов времени приема акустических сигналов запроса маяков-ответчиков ведущим подводным аппаратом и ответов маяков-ответчиков, и известным на борту ведомого автономного подводного аппарата расстоянию до ведущего подводного аппарата и направления на него.
Перед началом работы в районе модернизированная аппаратура потребителя навигационной гидроакустической системы СНП-10 устанавливается на ведущем подводном аппарате в режим «ведущий», на остальных подводных аппаратах группы - в режим «ведомый».
В процессе работы в районе на борту ведомого подводного аппарата периодически, при излучении ведущим подводным аппаратом сигнала запроса маяков-ответчиков, осуществляется прием аппаратурой потребителя навигационной гидроакустической системы сигнала запроса ведущим подводным аппаратом маяков-ответчиков и сигналов ответа маяков-ответчиков и измеряются разности моментов времени их приема, определяются разности сумм расстояний от ведущего подводного аппарата до каждого маяка-ответчика и от каждого маяка-ответчика до ведомого подводного аппарата и известного расстояния до ведущего подводного аппарата. Место ведомого подводного аппарата относительно маяков-ответчиков определяется в системе координат Oxyz, центр О которой расположен в точке установки одного из маяков-ответчиков, а ось х связана с главной осью эллипсоида положения ведомого подводного аппарата относительно маяка-ответчика, взятого за центр координат (см. чертеж), путем решения системы нелинейных уравнений

где i=1, 2, 3 ... n (n - число маяков-ответчиков);
ΔLi - разности сумм расстояний от ведущего подводного аппарата до i-го маяка-ответчика и от i-го маяка-ответчика до ведомого подводного аппарата и расстояния от ведущего подводного аппарата до ведомого подводного аппарата;
D - расстояние между подводными аппаратами;
X, Y, Z - искомые координаты ведомого подводного аппарата;
xi, yi, zi - координаты маяков-ответчиков.
Для преобразования полученных координат места ведомого подводного аппарата в более удобную систему прямоугольных координат с географической ориентацией осей Oenh учитывается, что положение системы координат Oxyz относительно системы координат с географической ориентацией осей Oenh определяется углами
Θ=90°-(П-180°) (2)
где П - географическое направление с ведомого на ведущий подводный аппарат, градусы, и
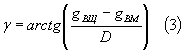
где gВЩ, gBM - глубины погружения соответственно ведущего и ведомого подводных аппаратов (чертеж).
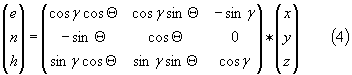
Координаты х, у, z ведомого подводного аппарата преобразуются в координаты е, n, h системы координат Oenh с помощью матричного выражения
Срок работы навигационной гидроакустической системы СНП-10 с маяками-ответчиками типа «прибор 16», у которого общее количество ответов на запросы составляет не менее 5000 [2], при использовании ее предлагаемым способом для обеспечения частоты определения места каждые 3 мин группы автономных подводных аппаратов составляет 250,0 ч.
Срок работы навигационной гидроакустической системы СНП-10 при использовании ее известным способом для обеспечения определения места с той же частотой группы из двух автономных подводных аппаратов составляет 125,0 ч, группы из трех автономных подводных аппаратов - 83,3 ч, группы из четырех автономных подводных аппаратов - 62,5 ч.
Таким образом, использование предлагаемого способа позволяет увеличить срок работы навигационной гидроакустической системы СНП-10 в 2-4 раза.
Предлагаемый способ использования навигационной гидроакустической системы группой автономных подводных аппаратов может быть реализован на аппаратуре потребителей большинства навигационных гидроакустических систем, в которых реализован способ-прототип.
Применение предлагаемого способа использования навигационной гидроакустической системы группой автономных подводных аппаратов с определением места ведомых подводных аппаратов относительно донных гидроакустических маяков-ответчиков по разностям расстояний до ведущего подводного аппарата и маяков-ответчиков обеспечивает по сравнению с существующими способами следующие преимущества:
1. Прием на ведомых подводных аппаратах сигналов запроса маяков-ответчиков ведущим подводным аппаратом и сигналов ответа маяков-ответчиков позволяет производить определение мест ведомых подводных аппаратов без дополнительного, специально для каждого ведомого ПА, излучения маяками-ответчиками гидроакустических сигналов, что позволяет сократить число посылок сигналов ответа маяками-ответчиками и существенно увеличить срок работы НГС при групповых действиях автономных подводных аппаратов в одном районе работ.
2. Прием на ведомых подводных аппаратах сигналов запроса маяков-ответчиков ведущим подводным аппаратом и сигналов ответа маяков-ответчиков позволяет определять место любого числа подводных аппаратов.
Источники информации
1. В.И.Бородин, Г.Е.Смирнов, Н.А.Толстякова, Г.В.Яковлев. Гидроакустические навигационные средства, Ленинград: «Судостроение», 1983, 262 стр.
2. Навигационная гидроакустическая система СНП-10. -Записки по гидрографии, №216, 1986, с.59-63.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИСПОЛЬЗОВАНИЯ НАВИГАЦИОННОЙ ГИДРОАКУСТИЧЕСКОЙ СИСТЕМЫ ПОДВОДНЫМИ АППАРАТАМИ С ОПРЕДЕЛЕНИЕМ МЕСТА ПО РАЗНОСТЯМ РАССТОЯНИЙ ДО МАЯКОВ-ОТВЕТЧИКОВ | 2005 |
|
RU2292057C1 |
| Способ определения координат автономного необитаемого подводного аппарата сверхглубокого погружения и гидроакустической донной станции связи и навигации по гидроакустическому каналу | 2023 |
|
RU2828701C1 |
| Способ навигационной поддержки группы специализированных подводных аппаратов, выполняющих общую миссию в мелководной акватории | 2023 |
|
RU2819199C1 |
| Гидроакустический комплекс позиционирования и связи для навигационно-информационного обеспечения автономных необитаемых подводных аппаратов | 2023 |
|
RU2812089C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| АРКТИЧЕСКАЯ ПОДВОДНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ВОЖДЕНИЯ И НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ НАДВОДНЫХ И ПОДВОДНЫХ ОБЪЕКТОВ НАВИГАЦИИ В СТЕСНЕННЫХ УСЛОВИЯХ ПЛАВАНИЯ | 2015 |
|
RU2596244C1 |
| СПОСОБ ГИДРОАКУСТИЧЕСКОГО ПОЗИЦИОНИРОВАНИЯ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2790529C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
Изобретение относится к области морской навигации, в частности к способу определения места автономного подводного аппарата относительно точки на дне моря, например, при выполнении научно-исследовательских, поисковых и других работ под водой. Способ использования навигационной гидроакустической системы подводными аппаратами заключается в определении места ведущего подводного аппарата относительно маяков-ответчиков по расстояниям до маяков-ответчиков, определенных путем измерения времен распространения акустического сигнала от подводного аппарата до маяков-ответчиков и обратно. Место каждого ведомого подводного аппарата определяется по разностям сумм расстояний от ведущего подводного аппарата до каждого маяка-ответчика и от каждого маяка-ответчика до ведомого подводного аппарата и расстояния от ведущего подводного аппарата до ведомого подводного аппарата, определенных путем измерения на борту ведомого подводного аппарата разностей моментов времени приема акустических сигналов запроса маяков-ответчиков ведущим подводным аппаратом и ответов маяков-ответчиков, и известным на борту ведомого автономного подводного аппарата расстоянию до ведущего подводного аппарата и направления на него. Технический результат изобретения - увеличение срока работы навигационной гидроакустической системы при групповых действиях автономных подводных аппаратов в одном районе работ за счет сокращения числа посылок сигналов ответа маяками-ответчиками путем одновременного определения места всех подводных аппаратов группы при опросе маяков-ответчиков одним из подводных аппаратов группы (ведущим). 1 ил.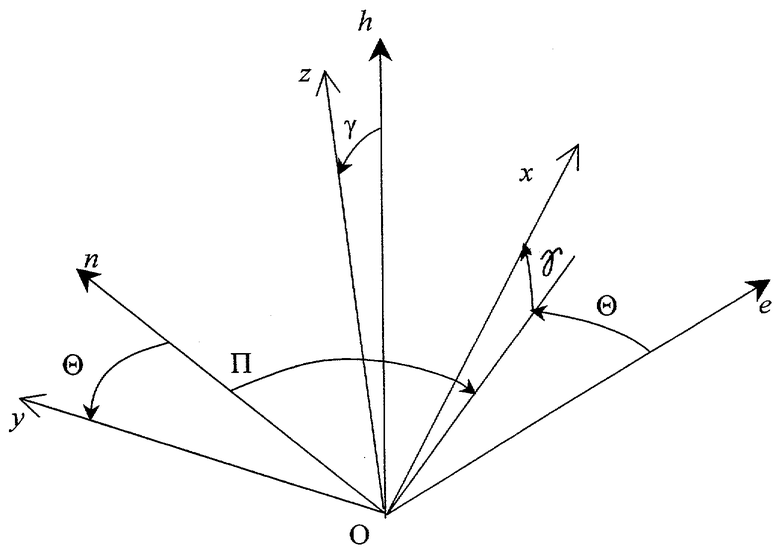
Способ использования навигационной гидроакустической системы подводными аппаратами с определением места по разностям расстояний до ведущего подводного аппарата и маяков-ответчиков, заключающийся в излучении на одном из подводных аппаратов группы (ведущем) акустического сигнала запроса донных маяков-ответчиков навигационной гидроакустической системы, приеме на остальных подводных аппаратах группы (ведомых) сигнала запроса ведущим подводным аппаратом донных маяков-ответчиков, приеме на всех подводных аппаратах группы сигналов ответа маяков-ответчиков, измерении на ведомых подводных аппаратах группы направления и расстояния до ведущего подводного аппарата, в котором путем измерения на ведущем подводном аппарате времен распространения акустического сигнала от ведущего подводного аппарата до маяков-ответчиков и обратно определяются расстояния от маяков-ответчиков до ведущего подводного аппарата, по которым определяется место ведущего подводного аппарата относительно маяков-ответчиков, отличающийся тем, что место каждого ведомого подводного аппарата определяется по разностям сумм расстояний от ведущего подводного аппарата до каждого маяка-ответчика и от каждого маяка-ответчика до ведомого подводного аппарата и расстояния от ведущего подводного аппарата до ведомого подводного аппарата, определенных путем измерения на борту ведомого подводного аппарата разностей моментов времени приема акустических сигналов запроса маяков-ответчиков ведущим подводным аппаратом и ответов маяков-ответчиков, и известным на борту ведомого автономного подводного аппарата расстоянию до ведущего подводного аппарата и направления на него.
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| - Записки по гидрографии, 1986, №216, с.59-63 | |||
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1995 |
|
RU2084924C1 |
| СПОСОБ ПОДВОДНОЙ НАВИГАЦИИ ПРИ ОПРЕДЕЛЕНИИ КООРДИНАТ ИСКУССТВЕННОЙ ПОЛЫНЬИ | 1996 |
|
RU2115136C1 |
| US 6771563 B1, 03.08.2004 | |||
| ТЕХНИЧЕСКАЯ " БИБЛИОТ[;:АГ. Г. Фишер | 0 |
|
SU165274A1 |

