Настоящее изобретение относится к устройству радиосвязи и способу передачи пилот-символа и, в частности, к устройству радиосвязи и способу передачи пилот-символа, используемым в системе радиосвязи, в которой индивидуальный пилот-символ передается каждому абоненту.
Уровень техники
В системе радиосвязи, так как среда распространения изменяется в каждый момент, для стороны, принимающей сигнал, необходимо корректировать принимаемый сигнал с учетом воздействия среды распространения. Поэтому сигнал, передаваемый в системе радиосвязи, как правило, содержит известный пилот-символ. Сторона, принимающая сигнал, обнаруживает состояние искажения пилот-символа посредством оценки канала и, используя результат, корректирует символы данных, включающие информацию, с учетом воздействия среды распространения.
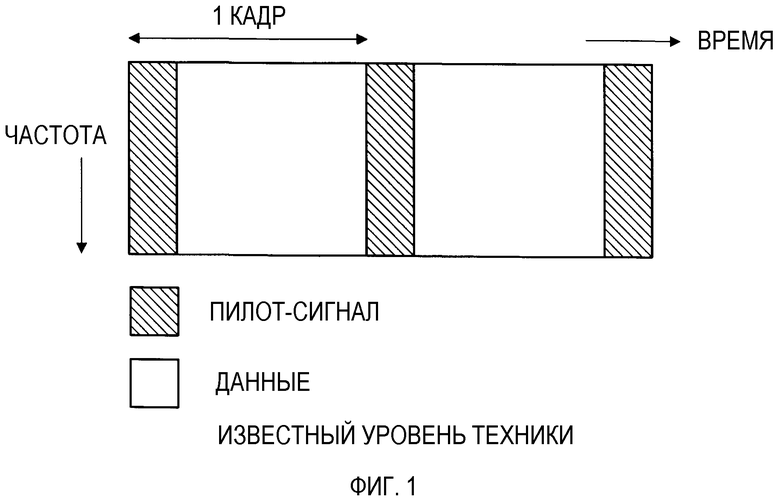
Конкретно, например, как показано на фиг.1, сторона, передающая сигнал, размещает пилот-символ (диагонально заштрихованные области на чертеже) в начале кадра и символы данных (белые области на чертеже) после пилот-символа. Затем принимающая сторона выполняет оценку канала, используя пилот-символы двух последовательных кадров, выполняет, например, интерполяцию и, таким образом, корректирует символы данных в течение этих двух пилот-символов с учетом изменения пути распространения.
Символы данных, таким образом, корректируются с учетом изменения пути распространения, основываясь на результатах оценки канала по пилот-символам, размещенным между символами данных. Поэтому, если интервал между пилот-символами уменьшается, то точность (коррекция с учетом пути распространения символа данных) повышается. Другими словами, если доля пилот-символов (в кадре) увеличивается, то символы данных принимаются с большей точностью.
Однако, поскольку пилот-символ не включает в себя подлежащую передаче информацию, то при повышении доли пилот-символов (в кадре), доля символов данных понижается и снижается эффективность передачи информации.
С учетом вышесказанного, например, в патентном документе 1 описывается метод адаптивного определения поднесущей, в которую вставлен пилот-символ, в соответствии с различиями в принимаемой мощности поднесущих с различными частотами при мультиплексировании с ортогональным частотным разделением каналов (OFDM). В методе, описанном в патентном документе 1, сторона, принимающая сигнал, определяет поднесущую для вставки пилот-символа и передает информацию о поднесущей стороне, передающей сигнал, в качестве обратной связи. Затем согласно этой информации обратной связи сторона, передающая сигнал, вставляет пилот-символ для передачи.
Патентный документ 1: JP 2003-174426
Раскрытие изобретения
Задачи, решаемые изобретением
Однако в вышеупомянутом методе сторона, принимающая сигнал, должна каждый раз передавать информацию о поднесущей для вставки пилот-символа в качестве обратной связи, в связи с чем возникает проблема, состоящая в том, что объем сигналов, передаваемых в качестве обратной связи, чрезмерно увеличивается. В результате информация обратной связи может ограничить пропускную способность канала.
В частности, когда положение для вставки пилот-символа определяется адаптивно, так как является предпочтительным, что обычный пилот-символ передается от базовой станции на мобильные станции, главным образом, определяется положение для вставки пилот-символа в канале восходящей линии связи от мобильной станции к базовой станции. Поэтому информация обратной связи передается по каналу нисходящей линии связи от базовой станции на мобильные станции. Следовательно, когда информация обратной связи чрезмерно увеличивается, как в вышеупомянутом методе, пропускная способность канала нисходящей линии связи для передачи данных с относительно большой величиной количества данных, например, как в случае распределения движущихся изображений и музыки, ограничивается и качество связи может ухудшаться.
Поэтому целью настоящего изобретения является создание устройства радиосвязи и способа передачи пилот-символа, выполненных с возможностью поддержания минимальным воздействия информации обратной связи на пропускную способность канала без снижения эффективности передачи информации в результате передачи пилот-символов.
Средства для решения задачи
Устройство радиосвязи, соответствующее изобретению, имеет конфигурацию, предусматривающую: получателя, который получает параметр, содержащий индикатор среды распространения, в которой передаются пилот-символы; селектор шаблона пилот-сигнала, который выбирает шаблон пилот-сигнала, указывающий положения пилот-символов в частотной области и временной области в соответствии с полученным параметром; и передатчик, который передает сигнал, включающий в себя информацию о выбранном шаблоне пилот-сигнала. Другими словами, согласно настоящему изобретению определяется шаблон (ниже упоминаемый как «шаблон пилот-сигнала») упорядочивания пилот-символов на основе параметров, указывающих среду распространения, и пилот-символы передаются в соответствии с шаблонами пилот-сигнала.
Полезный эффект изобретения
Согласно изобретению эффективность передачи информации в результате передачи пилот-символа не снижается, и воздействие информации обратной связи на пропускную способность канала может поддерживаться минимальным.
Краткое описание чертежей
Фиг.1 - диаграмма, изображающая пример обычного формата кадра;
фиг.2 - блок-схема основной части базовой станции согласно первому варианту осуществления;
фиг.3 - блок-схема блока выбора шаблона пилот-сигнала согласно первому варианту осуществления;
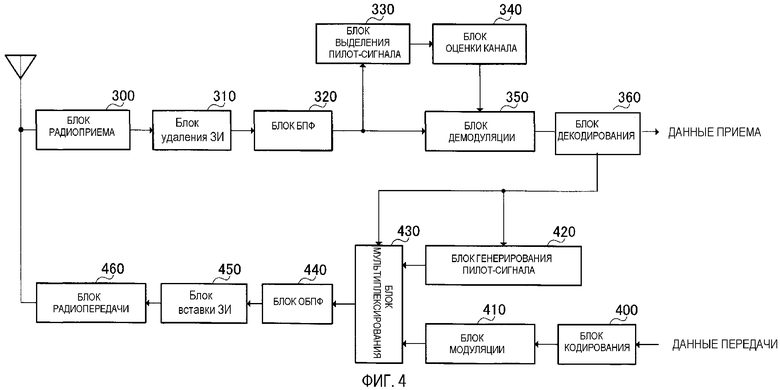
фиг.4 - блок-схема основной части мобильной станции согласно первому варианту осуществления;
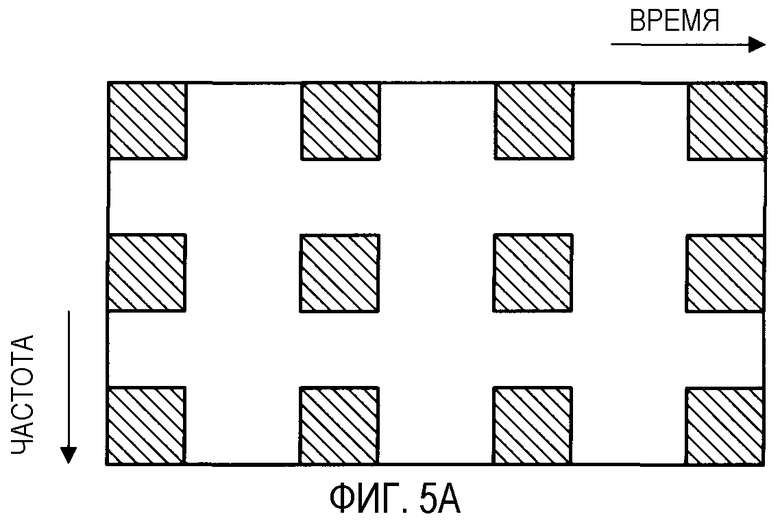
фиг.5А - диаграмма для объяснения различия в шаблоне пилот-сигнала вследствие помех от других сотовых ячеек согласно первому варианту осуществления;
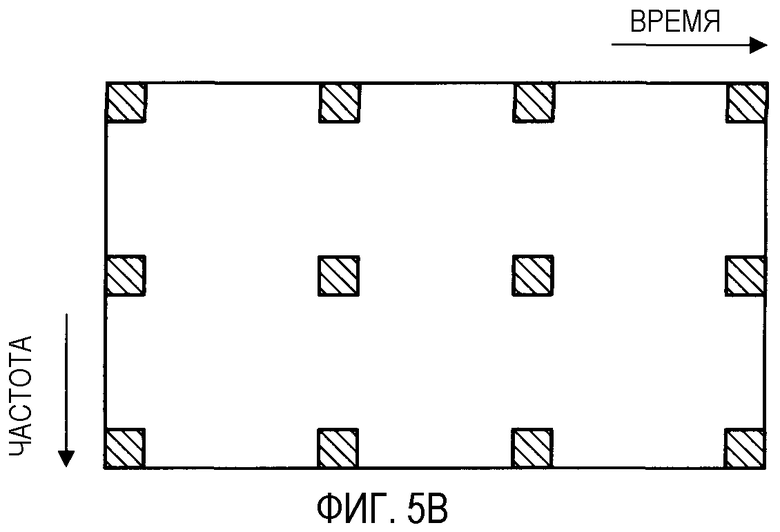
фиг.5В - другая диаграмма для объяснения различия в шаблоне пилот-сигнала вследствие помех от других сотовых ячеек согласно первому варианту осуществления;
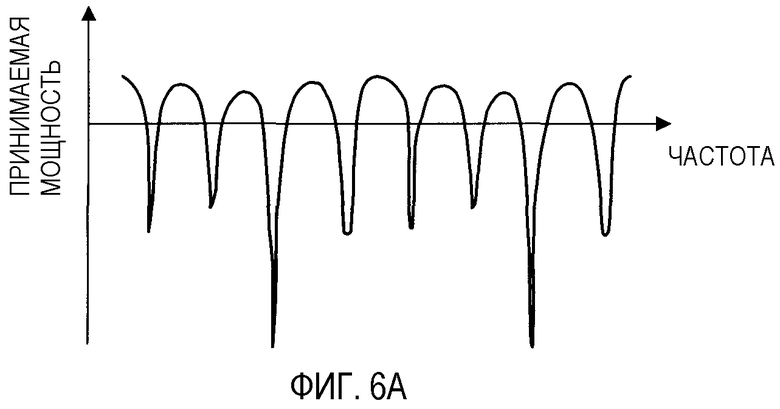
фиг.6А - график изменения принимаемой мощности в частотной области согласно первому варианту осуществления;
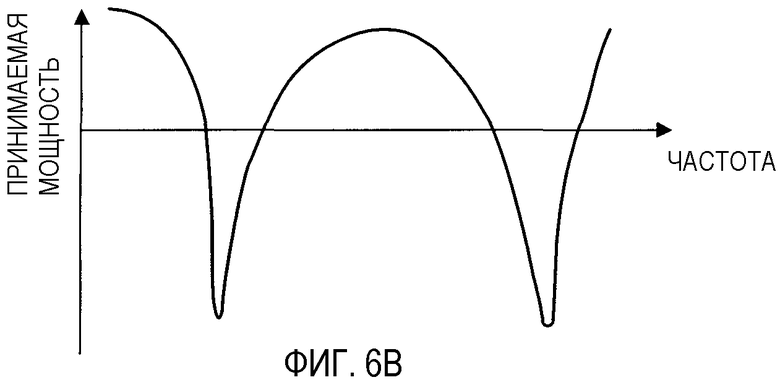
фиг.6В - график другого примера изменения принимаемой мощности в частотной области согласно первому варианту осуществления;
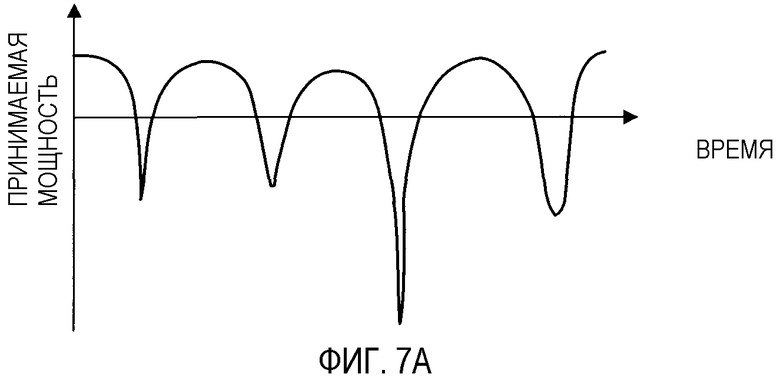
фиг.7А - график изменения принимаемой мощности во временной области согласно первому варианту осуществления;
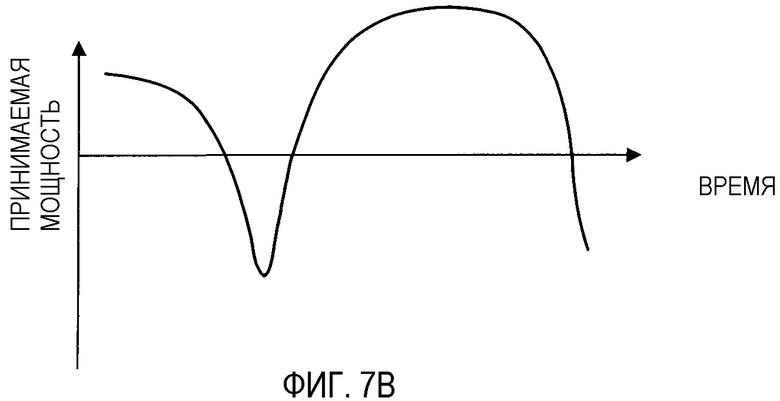
фиг.7В - график другого примера изменения принимаемой мощности во временной области согласно первому варианту осуществления;
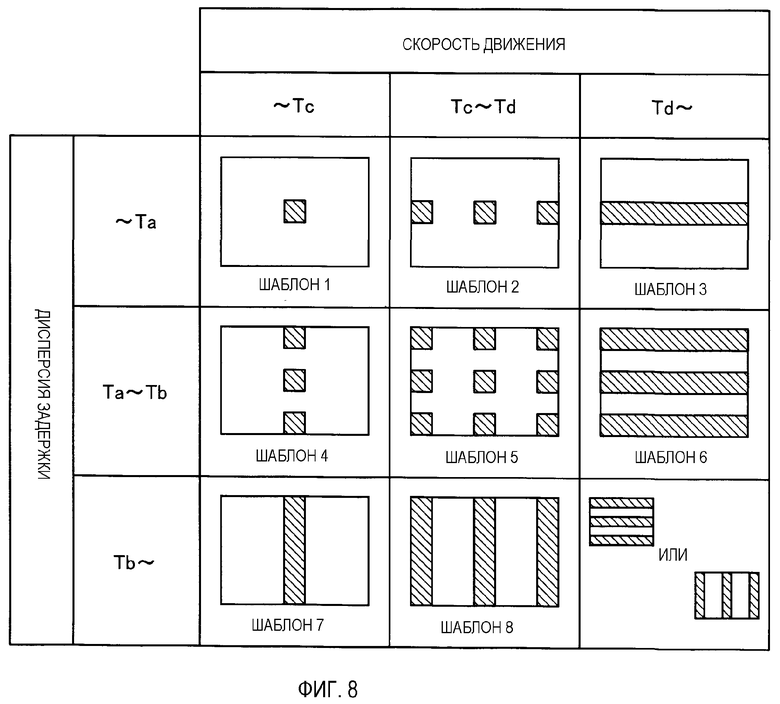
фиг.8 - пример шаблонов пилот-сигнала, соответствующих дисперсии задержки и скорости движения, согласно первому варианту осуществления;
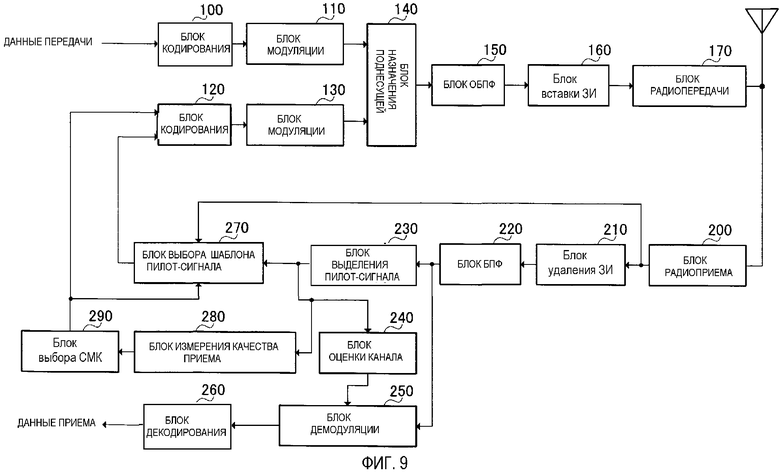
фиг.9 - блок-схема основной части базовой станции согласно второму варианту осуществления;
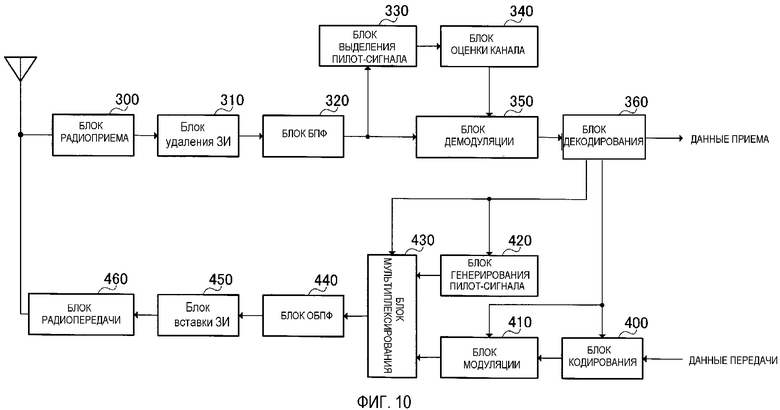
фиг.10 - блок-схема основной части мобильной станции согласно второму варианту осуществления;
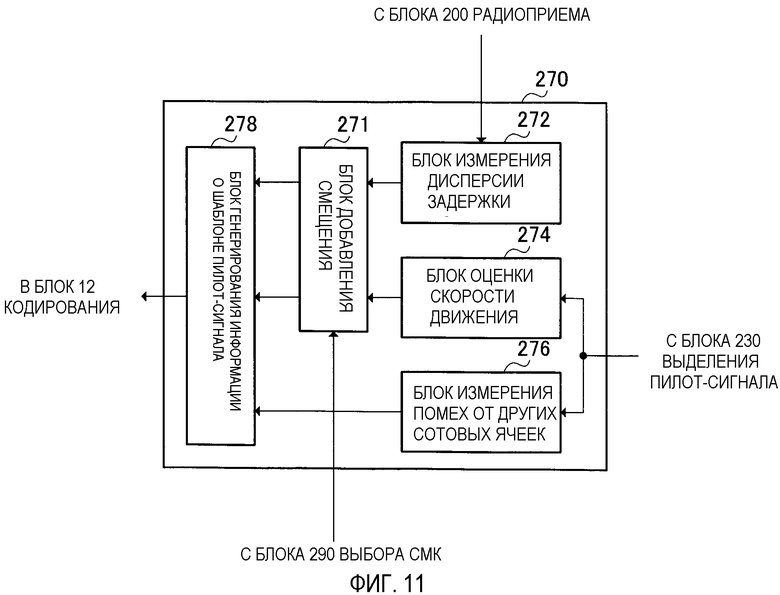
фиг.11 - блок-схема блока выбора шаблона пилот-сигнала согласно второму варианту осуществления;
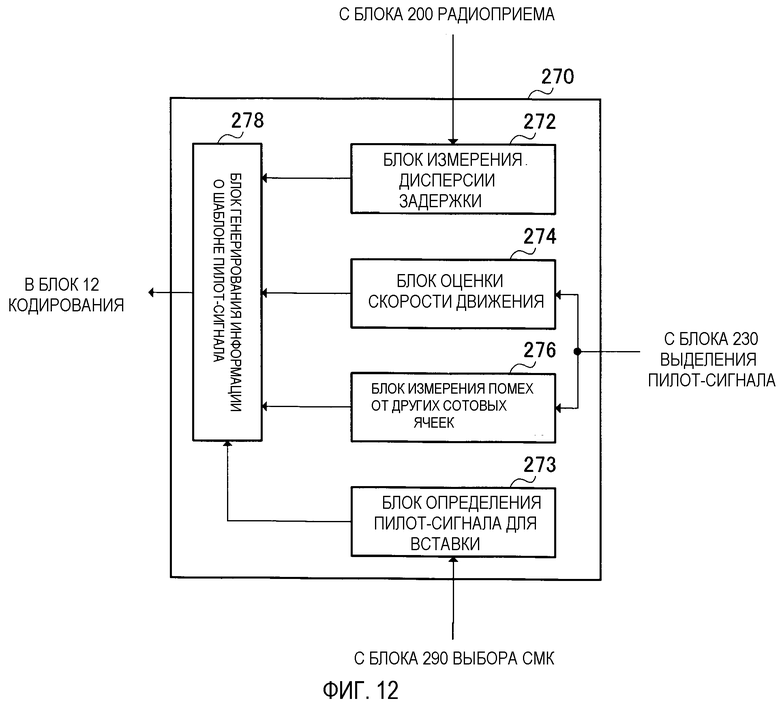
фиг.12 - блок-схема блока выбора шаблона пилот-сигнала согласно второму варианту осуществления;
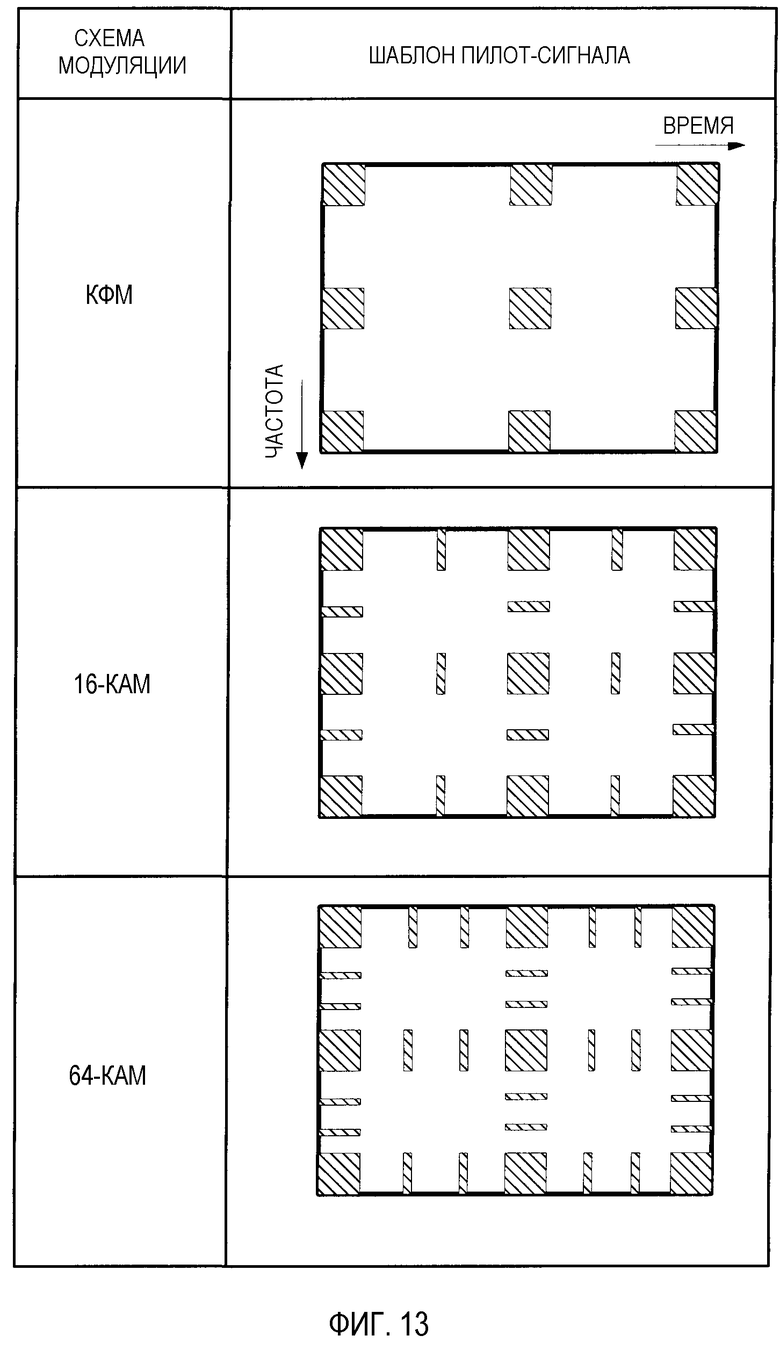
фиг.13 - пример шаблонов пилот-сигнала, соответствующих схемам модуляции, согласно второму варианту осуществления;
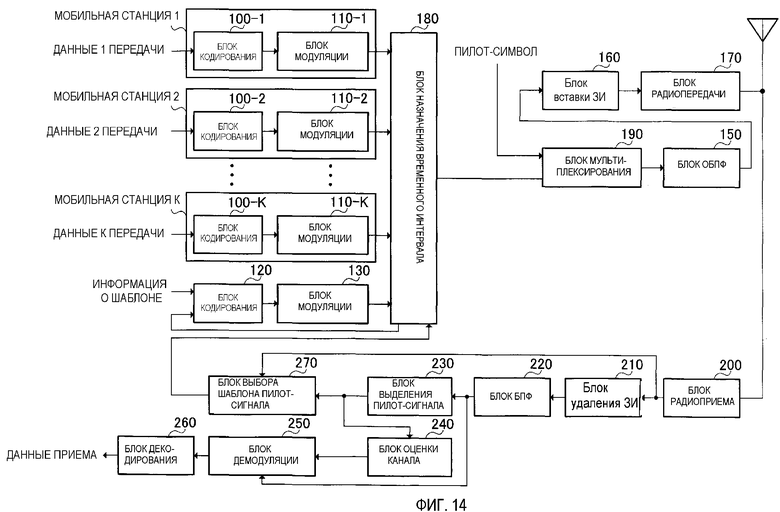
фиг.14 - блок-схема основной части базовой станции согласно третьему варианту осуществления;
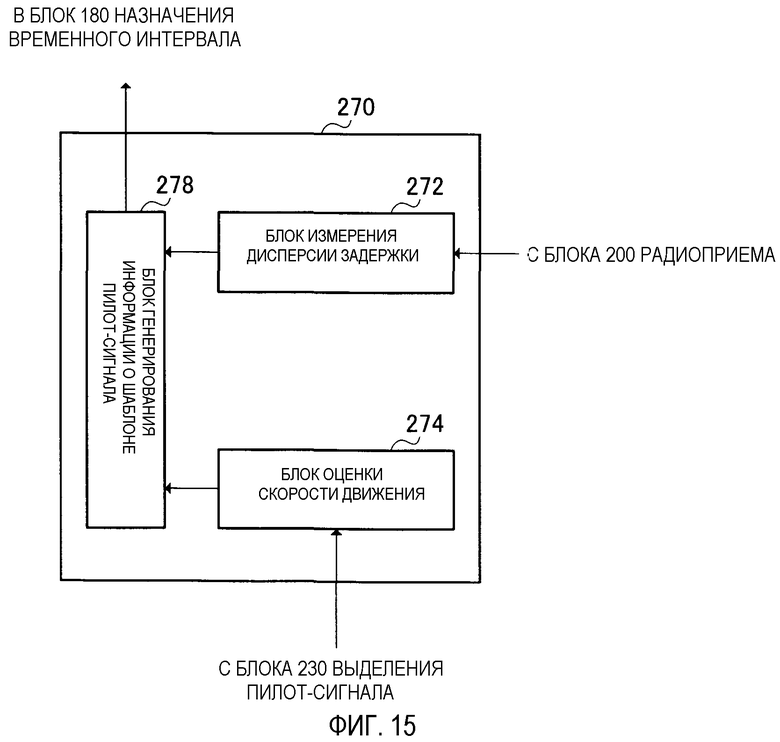
фиг.15 - блок-схема блока выбора шаблона пилот-сигнала согласно третьему варианту осуществления;
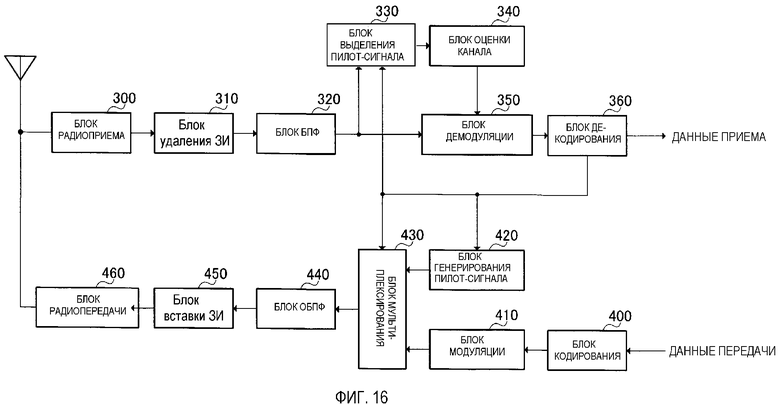
фиг.16 - блок-схема основной части мобильной станции согласно третьему варианту осуществления; и
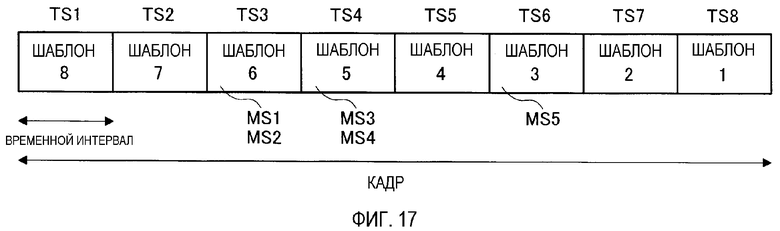
фиг.17 -пример отношения соответствия между шаблоном пилот-сигнала и временным интервалом согласно третьему варианту осуществления.
Лучший режим осуществления изобретения
Первый вариант осуществления
Первый вариант осуществления изобретения ниже конкретно описывается со ссылкой на прилагаемые чертежи. В нижеследующем описании предполагается, что базовая станция и мобильная станция осуществляют связь в системе OFDM, и описывается передача пилот-символа по каналу восходящей линии связи от мобильной станции на базовую станцию.
На фиг.2 представлена блок-схема, иллюстрирующая основную часть базовой станции согласно первому варианту осуществления изобретения. Базовая станция содержит секцию передачи, состоящую из блока 100 кодирования, блока 110 модуляции, блока 120 кодирования, блока 130 модуляции, блока 140 назначения поднесущей, блока 150 обратного быстрого преобразования Фурье (ОБПФ), блока 160 вставки защитного интервала (ЗИ) и блока 170 радиопередачи, и секцию приема, состоящую из блока 200 радиоприема, блока 210 удаления ЗИ, блока 220 быстрого преобразования Фурье (БПФ), блока 230 выделения пилот-сигнала, блока 240 оценки канала, блока 250 демодуляции, блока 260 декодирования и блока 270 выбора шаблона пилот-сигнала.
Блок 100 кодирования кодирует данные передачи и выводит кодированные данные в блок 110 модуляции.
Блок 110 модуляции модулирует выходной сигнал кодированных данных с блока 100 кодирования и выводит модулированные данные в блок 140 назначения поднесущей.
Блок 120 кодирования кодирует информацию о шаблоне пилот-сигнала (описанную ниже), генерируемую в блоке 270 выбора шаблона пилот-сигнала, и выводит кодированные данные в блок 130 модуляции.
Блок 130 модуляции модулирует выходной сигнал кодированных данных с блока 120 кодирования и выводит модулированные данные в блок 140 назначения поднесущей.
Блок 140 назначения поднесущей назначает множество поднесущих, имеющих частоты, ортогональные друг другу, данным передачи и информации о шаблоне пилот-сигнала. Более конкретно, например, блок 140 назначения поднесущей выполняет последовательно/параллельное (П/П) преобразование данных передачи для получения параллельных данных множества последовательностей и назначает поднесущие данным каждой последовательности и информации о шаблоне пилот-сигнала.
Блок 150 ОБПФ выполняет обратное быстрое преобразование Фурье данных передачи и информации о шаблоне пилот-сигнала и мультиплексирует результаты по назначенным соответствующим образом поднесущим и, таким образом, генерирует сигнал OFDM.
Блок 160 вставки ЗИ копирует концевую часть сигнала OFDM в начало и вставляет защитный интервал.
Блок 170 радиопередачи выполняет предопределенную обработку радиопередачи (такую как цифроаналоговое (Ц/А) преобразование и преобразование с повышением частоты) сигнала OFDM с защитным интервалом, вставленным в него, для передачи при помощи антенны.
Блок 200 радиоприема принимает сигнал при помощи антенны и выполняет предопределенную обработку радиоприема (преобразование с понижением частоты и аналого-цифровое (А/Ц) преобразование) принимаемого сигнала для вывода в блок 210 удаления ЗИ и блок 270 выбора шаблона пилот-сигнала.
Блок 210 удаления ЗИ удаляет защитный интервал из принимаемого сигнала и выводит сигнал OFDM, из которого удален защитный интервал, в блок 220 БПФ.
Блок 220 БПФ выполняет быстрое преобразование Фурье сигнала OFDM и демультиплексирует данные, мультиплексированные на каждой поднесущей, для вывода в блок 230 выделения пилот-сигнала и блок 250 демодуляции.
Блок 230 выделения пилот-сигнала выделяет пилот-символ, которым является известный символ, из данных с блока 220 БПФ, в соответствии с шаблоном пилот-сигнала, выбранным в блоке 270 выбора шаблона пилот-сигнала, для вывода в блок 240 оценки канала и блок 270 выбора шаблона пилот-сигнала.
Блок 240 оценки канала выполняет оценку канала, используя известный пилот-символ, и выводит результат оценки канала в блок 250 демодуляции.
Блок 250 демодуляции демодулирует данные, мультиплексированные на каждой поднесущей, используя результат оценки канала, и выводит демодулированные данные в блок 260 декодирования.
Блок 260 декодирования декодирует демодулированные данные и выводит данные приема.
Блок 270 выбора шаблона пилот-сигнала выбирает шаблон пилот-сигнала, так что размещение пилот-символов является оптимальным в частотной области и временной области в кадре, соответственно среде распространения между базовой станцией и мобильной станцией, в качестве источника передачи пилот-символа. Более конкретно, как показано на фиг.3, блок 270 выбора шаблона пилот-сигнала имеет блок 272 измерения дисперсии задержки, блок 274 оценки скорости движения, блок 276 измерения помех от других сотовых ячеек и блок 278 генерирования информации о шаблоне пилот-сигнала.
Блок 272 измерения дисперсии задержки генерирует профиль задержки, используя принимаемый сигнал, и измеряет дисперсию задержки, указывающую на дисперсию задержанных волн. Если дисперсия задержки велика, т.е. время между приемом прямого сигнала и приемом всех задержанных волн велико, то имеет место большое частотно-селективное замирание. Если дисперсия задержки мала, то частотно-селективное замирание также мало. Более конкретно, например, в случае среды распространения, когда нет задержанных волн и передается только прямой сигнал, частотно-селективное замирание отсутствует.
Кроме того, в данном варианте осуществления указано, что базовая станция генерирует профиль задержки, но поскольку сигналы передаются по одним и тем же маршрутам по каналам восходящей линии связи и нисходящей линии связи при многолучевом распространении, то мобильная станция может генерировать профиль задержки канала нисходящей линии связи для уведомления базовой станции при измерении дисперсии задержки.
Блок 274 оценки скорости движения оценивает скорость движения мобильной станции, которая передает пилот-символ, основываясь на изменении принимаемой мощности пилот-символа. Другими словами, блок 274 оценки скорости движения оценивает, что мобильная станция движется с высокой скоростью, когда происходят быстрые изменения принимаемой мощности пилот-символа, в то же время оценивая, что мобильная станция останавливается или движется с малой скоростью, когда принимаемая мощность пилот-символа не изменяется в значительной степени.
Используя пилот-символ, блок 276 измерения помех от других сотовых ячеек измеряет помехи (от других сотовых ячеек) при помощи сигналов, передаваемых в сотовых ячейках, исключая сотовую ячейку, к которой принадлежит базовая станция. Так как пилот-символ известен, блок 276 измерения помех от других сотовых ячеек может измерять помехи, обуславливаемые сигналами других сотовых ячеек на пути распространения.
В соответствии с дисперсией задержки, скоростью движения и помехами от других сотовых ячеек блок 278 генерирования информации о шаблоне пилот-сигнала выбирает шаблон пилот-сигнала так, что размещение пилот-символа в кадре является оптимальным, и генерирует информацию о шаблоне пилот-сигнала, указывающую на выбранный шаблон пилот-сигнала. Выбор шаблона пилот-сигнала конкретно описан ниже.
На фиг.4 представлена блок-схема основной части мобильной станции согласно первому варианту осуществления изобретения. Мобильная станция содержит секцию приема, состоящую из блока 300 радиоприема, блока 310 удаления ЗИ, блока 320 БПФ, блока 330 выделения пилот-сигнала, блока 340 оценки канала, блока 350 демодуляции и блока 360 декодирования, и секцию передачи, состоящую из блока 400 кодирования, блока 410 модуляции, блока 420 генерирования пилот-сигнала, блока 430 мультиплексирования, блока 440 ОБПФ, блока 450 вставки ЗИ и блока 460 радиопередачи.
Блок 300 радиоприема принимает сигнал при помощи антенны и выполняет предопределенную обработку радиоприема (такую как преобразование с понижением частоты и А/Ц преобразование) принимаемого сигнала для вывода в блок 310 удаления ЗИ.
Блок 310 удаления ЗИ удаляет защитный интервал из принимаемого сигнала и выводит сигнал OFDM, из которого удален защитный интервал, в блок 320 БПФ.
Блок 320 БПФ выполняет быстрое преобразование Фурье сигнала OFDM и демультиплексирует данные, мультиплексированные на каждой поднесущей, для вывода в блок 330 выделения пилот-сигнала и блок 350 демодуляции.
Блок 330 выделения пилот-сигнала выделяет пилот-символ из данных с блока 320 БПФ для вывода в блок 340 оценки канала.
Блок 340 оценки канала выполняет оценку канала, используя известный пилот-символ, и выводит результат оценки канала в блок 350 демодуляции.
Блок 350 демодуляции демодулирует данные, мультиплексированные на каждой поднесущей, используя результат оценки канала, и выводит демодулированные данные в блок 360 декодирования.
Блок 360 декодирования декодирует демодулированные данные для вывода данных приема, в то же время выводя информацию о шаблоне пилот-сигнала в демодулированных данных в блок 420 генерирования пилот-сигнала и блок 430 мультиплексирования.
Блок 400 кодирования кодирует данные передачи и выводит кодированные данные в блок 410 модуляции.
Блок 410 модуляции модулирует кодированные данные с блока 400 кодирования и выводит полученные символы данных в блок 430 мультиплексирования.
Блок 420 генерирования пилот-сигнала генерирует пилот-символы в соответствии с информацией о шаблоне пилот-сигнала для вывода в блок 430 мультиплексирования.
В соответствии с информацией о шаблоне пилот-сигнала блок 430 мультиплексирования размещает пилот-символ в кадре, мультиплексирует пилот-символ и символы данных и преобразует мультиплексированные данные в параллельные данные для вывода в блок 440 ОБПФ.
Блок 440 ОБПФ выполняет обратное быстрое преобразование Фурье параллельных мультиплексированных данных для мультиплексирования по назначенным соответствующим образом поднесущим и, таким образом, генерирует сигнал OFDM.
Блок 450 вставки ЗИ копирует концевую часть сигнала OFDM в начало и вставляет защитный интервал.
Блок 460 радиопередачи выполняет предопределенную обработку радиопередачи (такую как Ц/А преобразование и преобразование с повышением частоты) сигнала OFDM с защитным интервалом, вставленным в него, для передачи при помощи антенны.
Ниже описан принцип действия базовой станции и мобильной станции, выполненных, как описано выше, на конкретных примерах.
Сначала описан принцип действия базовой станции в течение периода, когда блок 200 радиоприема в базовой станции принимает сигнал, выбирается шаблон пилот-сигнала и передается информация о шаблоне пилот-сигнала.
Сигнал, принимаемый от антенны базовой станции, подвергается предопределенной обработке радиоприема (такой как преобразование с понижением частоты и А/Ц преобразование) и выводится в блок 210 удаления ЗИ и блок 272 измерения дисперсии задержки в блоке 270 выбора шаблона пилот-сигнала.
В принимаемом сигнале защитный интервал удаляется в блоке 210 удаления ЗИ, результирующий сигнал подвергается быстрому преобразованию Фурье в блоке 220 БПФ, и данные, мультиплексированные на каждой поднесущей, таким образом, демультиплексируются и выводятся в блок 230 выделения пилот-сигнала и блок 250 демодуляции.
Затем в блоке 230 выделения пилот-сигнала выделяется пилот-символ, и в блоке 240 оценки канала выполняется оценка канала с использованием пилот-символа. Результат оценки канала выводится в блок 250 демодуляции, и блок 250 демодуляции демодулирует данные, используя результат оценки канала. Затем демодулированные данные, полученные в результате демодуляции, декодируются в блоке 260 декодирования, и, таким образом, получаются данные приема.
Далее пилот-символ, выделенный блоком 230 выделения пилот-символа, выводится в блок 274 оценки скорости движения и блок 276 измерения помех от других сотовых ячеек в блоке 270 выбора шаблона пилот-сигнала.
Затем блок 270 выбора шаблона пилот-сигнала выбирает оптимальный шаблон пилот-сигнала, как описано ниже.
Сначала блок 272 измерения дисперсии задержки генерирует профиль задержки принимаемого сигнала для измерения дисперсии задержки. Как описано выше, дисперсия задержки представляет собой индикатор уровня частотно-селективных замираний. Данный вариант осуществления использует конфигурацию, в которой дисперсия задержки измеряется при помощи профиля задержки, и может использоваться другая конфигурация, согласно которой дисперсия задержки известна заранее для каждой сотовой ячейки. Дисперсия задержки определяется, например, с учетом радиуса сотовой ячейки и географическими особенностями внутри сотовой ячейки и представляет собой почти постоянную величину для каждой сотовой ячейки. Следовательно, возможна конфигурация, которая хранит дисперсию задержки, характерную для сотовой ячейки, которая измеряется заранее и получается без вычисления дисперсии задержки посредством генерирования профиля задержки. В таком случае можно уменьшить количество вычислений для выбора шаблона пилот-сигнала и повысить скорость обработки.
Далее, блок 274 оценки скорости движения оценивает скорость движения мобильной станции. Другими словами, скорость движения мобильной станции является высокой, если изменения принимаемой мощности пилот-символа велики, и скорость движения мобильной станции является низкой, когда изменения принимаемой мощности пилот-символа малы.
Кроме того, блок 276 измерения помех от других сотовых ячеек измеряет помехи от других сотовых ячеек, обуславливаемые сигналами других сотовых ячеек. Посредством сравнения части, соответствующей пилот-символу в принимаемом сигнале, с исходным пилот-символом, можно измерять помехи от других сотовых ячеек, обуславливаемые сигналами других сотовых ячеек на пути распространения.
Основываясь на параметрах дисперсии задержки, скорости движения и помех от других сотовых ячеек, полученных, как описано выше, блок 278 генерирования информации о шаблоне пилот-сигнала выбирает шаблон пилот-сигнала в соответствии со стратегией, описанной ниже, и генерирует информацию о шаблоне пилот-сигнала, указывающую на выбранный шаблон пилот-сигнала.
Когда помехи от других сотовых ячеек, измеренные блоком 276 измерения помех от других сотовых ячеек, велики, так как снижается качество приема, необходимо увеличить долю пилот-символов в кадре, как показано на фиг.5А, чтобы повысить качество приема. Если же помехи от других сотовых ячеек малы, то доля пилот-символов в кадре уменьшается, как показано на фиг.5В. Кроме того, на фиг.5А и 5В диагонально заштрихованные области представляют пилот-символы, а белые области представляют символы данных. Далее, на фиг.5А и 5В показан один кадр, причем горизонтальное направление представляет уровень во временной области, и вертикальное направление представляет уровень в частотной области.
Далее, когда дисперсия задержки, измеренная в блоке 272 измерения дисперсии задержки, велика, избирательность по частоте замираний является высокой, как показано на фиг.6А, различные замирания испытывают близкие частоты, и поэтому необходимо плотно размещать пилот-символы в частотной области кадра. Если же дисперсия задержки мала, избирательность по частоте замираний также мала, как показано на фиг.6В, и нет необходимости в плотном размещении пилот-символов в частотной области кадра.
Если скорость движения мобильной станции, которая оценивается в блоке 274 оценки скорости движения, велика, то временные изменения в среде распространения являются интенсивными, как показано на фиг.7А, и, таким образом, необходимо плотно размещать пилот-символы во временной области кадра. Если же скорость движения мобильной станции низка, то временные изменения в среде распространения являются умеренными, как показано на фиг.7В, и нет необходимости в плотном размещении пилот-символов во временной области кадра.
В соответствии с этими стратегиями, например, согласно помехам от других сотовых ячеек, блок 278 генерирования информации о шаблоне пилот-сигнала сначала определяет уровни блоков в частотной области и временной области пилот-символа. Другими словами, когда помехи от других сотовых ячеек велики, например, уровень блоков пилот-символа увеличивается, как показано на фиг.5А (на чертеже каждый прямоугольник с диагональной штриховкой представляет один блок). И наоборот, когда помехи от других сотовых ячеек малы, уровень блоков пилот-символа уменьшается, как показано, например, на фиг.5В.
Затем, когда определен уровень блоков пилот-символа, размещение блоков определяется из таблицы, показанной, например, на фиг.8, и выбирается шаблон пилот-сигнала. Кроме того, каждый шаблон пилот-сигнала, показанный на фиг.8, указывает размещение пилот-символов в кадре, и диагонально заштрихованная область представляет пилот-символ. Далее, в каждом шаблоне пилот-сигнала горизонтальное направление представляет временную область, тогда как вертикальное направление представляет частотную область.
В примере, показанном на фиг.8, если дисперсия задержки меньше, чем предопределенный порог Та, то только один блок пилот-символа размещается в частотной области (шаблоны 1, 2 и 3). Если дисперсия задержки равна или больше предопределенного порога Та и меньше предопределенного порога Tb, то три блока пилот-символов размещаются в частотной области (шаблоны 4, 5 и 6). Далее, когда дисперсия задержки равна или больше предопределенного порога Tb, пилот-символы размещаются непрерывно в частотной области (шаблоны 7 и 8).
Аналогично, если скорость движения меньше, чем предопределенный порог Тс, то только один блок пилот-символа размещается во временной области (шаблоны 1, 4 и 7). Затем, если скорость движения равна предопределенному порогу Тс или больше и меньше, чем предопределенный порог Td, то три блока пилот-символа размещаются во временной области (шаблоны 2, 5 и 8). Далее, если скорость движения равна или больше, чем предопределенный порог Td, то пилот-символы размещаются непрерывно во временной области (шаблоны 3 и 6).
Кроме того, на фиг.8, если дисперсия задержки равна или больше, чем предопределенный порог Tb, и скорость движения равна предопределенному порогу Td или больше, то одинаковый шаблон пилот-сигнала (шаблон 6 или 8) выбирается в качестве шаблона, когда мало одно из дисперсии задержки и скорости движения. Это объясняется тем, что доля символов данных в кадре значительно уменьшается, и снижается эффективность передачи информации, когда пилот-символы являются последовательными как в частотной области, так и во временной области.
Фактически, изменение замирания во времени является умеренным по сравнению с изменением частотно-селективных замираний, и поэтому, если как дисперсия задержки, так и скорость движения велики, то выбирается шаблон пилот-сигнала (шаблон 8), в котором дисперсия задержки равна или больше, чем предопределенный порог Tb, и скорость движения равна или больше, чем предопределенный порог Тс, и меньше, чем порог Td.
Для уведомления мобильной станции о выбранном таким образом шаблоне пилот-сигнала блок 278 генерирования информации о шаблоне пилот-сигнала генерирует информацию о шаблоне пилот-сигнала. В данном описании в вышеописанном примере, так как существуют два уровня блоков (фиг.5А и 5В) пилот-символа, которые определяются в соответствии с помехами от других сотовых ячеек, и восемь шаблонов (фиг.8) существуют на каждом из уровней блоков пилот-символа, генерируется такая информация о шаблоне пилот-сигнала, которая указывает, какой шаблон пилот-сигнала выбирается из шестнадцати (16=2×8) шаблонов пилот-сигнала. Поэтому информация о шаблоне пилот-сигнала может представляться максимум четырьмя битами (24=16), и можно предотвратить блокирование пропускной способности канала информацией обратной связи для адаптивного управления передачей пилот-символа. Кроме того, вышеупомянутые шаблоны пилот-сигнала представляют собой только один пример, и можно дополнительно уменьшить количество информации о шаблоне пилот-сигнала в зависимости от количества шаблонов пилот-сигнала.
Сформированная информация о шаблоне пилот-сигнала кодируется в блоке 120 кодирования, модулируется в блоке 130 модуляции и выводится в блок 140 назначения поднесущей. Далее информация о шаблоне пилот-сигнала выводится в блок 230 выделения пилот-сигнала. Блок 230 выделения пилот-сигнала выделяет пилот-символы, которые мобильная станция передает в соответствии с информацией о шаблоне пилот-сигнала, сообщаемой от базовой станции, в соответствии с введенной информацией о шаблоне пилот-сигнала.
Затем данные передачи кодируются в блоке 100 кодирования, модулируются в блоке 110 модуляции и выводятся в блок 140 назначения поднесущей.
Затем блок 140 назначения поднесущей назначает поднесущую для каждой из информации о шаблоне пилот-сигнала и данных передачи, блок 150 ОБПФ выполняет обратное быстрое преобразование Фурье, и генерируется сигнал OFDM, который включает в себя информацию о шаблоне пилот-сигнала и данные передачи.
Затем блок 160 вставки ЗИ копирует концевую часть сигнала OFDM в начало, тем самым вставляя защитный интервал в сигнал OFDM, блок 170 радиопередачи выполняет предопределенную обработку радиопередачи (такую как Ц/А преобразование и преобразование с повышением частоты) сигнала, и радиосигнал передается при помощи антенны.
Ниже описан принцип действия мобильной станции в течение периода, во время которого блок 300 радиоприема в мобильной станции принимает информацию о шаблоне пилот-сигнала и передается сигнал, включающий в себя пилот-символы.
Блок 300 радиоприема выполняет предопределенную обработку радиоприема (такую как преобразование с понижением частоты и А/Ц преобразование) сигнала, принимаемого от антенны мобильной станции. Блок 310 удаления ЗИ удаляет защитный интервал из сигнала. Блок 320 БПФ выполняет быстрое преобразование Фурье сигнала и демультиплексирует данные, мультиплексированные на каждой поднесущей, для вывода в блок 330 выделения пилот-сигнала и блок 350 демодуляции.
Затем блок 330 выделения пилот-сигнала выделяет пилот-символ. Блок 340 оценки канала выполняет оценку канала, используя пилот-символ, и выводит результат оценки канала в блок 350 демодуляции. Блок 350 демодуляции демодулирует данные, используя результат оценки канала. Блок 360 декодирования декодирует демодулированные данные, полученные в результате демодуляции, и получает данные приема и информацию о шаблоне пилот-сигнала.
Полученная информация о шаблоне пилот-сигнала выводится в блок 420 генерирования пилот-сигнала и блок 430 мультиплексирования. Затем блок 420 генерирования пилот-сигнала генерирует некоторое количество пилот-символов, реализуя конфигурацию кадра шаблона пилот-сигнала, указанного информацией о шаблоне пилот-сигнала, и выводит сформированные пилот-символы в блок 430 мультиплексирования.
Блок 400 кодирования кодирует данные передачи, и блок 410 модуляции модулирует данные и выводит в качестве символов данных в блок 430 мультиплексирования.
В соответствии с информацией о шаблоне пилот-сигнала блок 430 мультиплексирования мультиплексирует пилот-символы и символы данных и генерирует кадр шаблона пилот-сигнала, указанного информацией о шаблоне пилот-сигнала.
Блок 440 ОБПФ выполняет обратное быстрое преобразование Фурье сформированного кадра и, таким образом, генерирует сигнал OFDM, включающий в себя пилот-символы и символы данных.
Блок 450 вставки ЗИ копирует концевую часть сигнала OFDM в начало и вставляет защитный интервал в сигнал OFDM. Блок 460 радиопередачи выполняет предопределенную обработку радиопередачи (такую как Ц/А преобразование и преобразование с повышением частоты) сигнала, и радиосигнал передается при помощи антенны.
После этого базовая станция снова выбирает шаблон пилот-сигнала, и повторяется вышеупомянутая операция.
Таким образом, согласно данному варианту осуществления выбирается шаблон пилот-сигнала для передачи пилот-символов, которые являются оптимальными, необходимыми и достаточными для среды распространения, используя в качестве параметров дисперсию задержки, скорость движения мобильной станции и помехи, вызываемые сигналами других сотовых ячеек. Эффективность передачи информации, таким образом, не понижается в результате передачи пилот-символов, и можно поддерживать минимальным воздействие информации обратной связи на пропускную способность канала.
Кроме того, хотя в данном варианте осуществления был описан случай, когда пилот-символы передаются по каналу восходящей линии связи, изобретение не ограничивается этим. Мобильная станция выбирает шаблон пилот-сигнала и сообщает базовой станции информацию о шаблоне пилот-сигнала, так что можно управлять передачей пилот-символов по каналу нисходящей линии связи от базовой станции на мобильную станцию.
Далее, хотя в данном варианте осуществления был описан случай, когда связь осуществляется в системе OFDM, изобретение не ограничивается этим. Изобретение применимо к системе связи с множеством несущих, отличной от системы OFDM, и системе связи с множественным доступом с кодовым разделением каналов (МДКР), множественным доступом с временным разделением каналов (МДВР) и т.п.
Кроме того, в зависимости от применяемой системы связи доля пилот-символов в кадре определяется с использованием в качестве параметров величины всех помех, включая помехи от других мобильных станций в сотовой ячейке и помехи многолучевого распространения, а также помехи от других сотовых ячеек.
Далее, хотя в данном варианте осуществления был описан случай, когда обеспечивается конфигурация с выбором шаблона пилот-сигнала на основе использования одновременно трех параметров: дисперсии задержки, скорости движения мобильной станции и помех, создаваемых сигналами других сотовых ячеек, изобретение не ограничивается этим, и шаблон пилот-сигнала может выбираться с использованием только одного или двух из этих параметров.
Кроме того, параметры не ограничиваются вышеупомянутыми тремя параметрами, и, в соответствии с любыми параметрами, которые отображают среду распространения, можно определять размещение пилот-символов в частотной области и временной области кадра.
Второй вариант осуществления
Влияние точности оценки канала с использованием пилот-символа на частоту ошибки в битах изменяется для разных схем модуляции. Другими словами, если схема модуляции имеет больший уровень модуляции, то требуется более высокая точность оценки канала. В частности, в случае квадратурной амплитудной модуляции (КАМ), такой как 16-КАМ и 64-КАМ, так как при демодуляции требуется оценка по амплитуде, а также оценка по фазе, необходима высокая точность оценки канала. Далее, чтобы получить высокую точность оценки канала, необходимо увеличивать долю пилот-символов (т.е. плотность пилот-символов) в кадре.
Поэтому в данном варианте осуществления шаблон пилот-сигнала выбирается дополнительно с учетом схемы модуляции в дополнение к трем параметрам (дисперсия задержки, скорость движения мобильной станции и помехи от других сотовых ячеек), используемым в первом варианте осуществления. Кроме того, в нижеследующем описании, как и в первом варианте осуществления, предполагается, что базовая станция и мобильная станция осуществляют связь в системе OFDM, и описывается передача пилот-символа по каналу восходящей линии связи от мобильной станции на базовую станцию.
На фиг.9 представлена блок-схема основной части базовой станции согласно второму варианту осуществления изобретения. В дополнение к конфигурации первого варианта осуществления (фиг.2) базовая станция согласно данному варианту осуществления имеет блок 280 измерения качества приема и блок 290 выбора схемы модуляции и кодирования (СМК).
Блок 280 измерения качества приема измеряет отношение сигнал-помеха (ОСП) для определения качества приема, используя пилот-символы из блока 230 выделения пилот-сигнала, и выводит измеренное значение в блок 290 выбора СМК.
На основе значения ОСП из блока 280 измерения качества приема блок 290 выбора СМК выбирает схему модуляции и скорость кодирования данных для передачи мобильной станцией и выводит информацию (информацию о СМК), указывающую на выбранную схему модуляции и скорость кодирования, в блок 270 выбора шаблона пилот-сигнала и блок 120 кодирования. В блоке 290 выбора СМК имеется таблица (таблица СМК), установленная для множества комбинаций схемы модуляции и скорости кодирования, позволяющих выполнять прием данных с предопределенной вероятностью ошибки, соответственно, в отношении множества значений ОСП, и посредством обращения к таблице СМК, основываясь на значении ОСП, выбирается оптимальная комбинация схемы модуляции и скорости кодирования из множества комбинаций. Информация о СМК подвергается такой же обработке, что и информация о шаблоне пилот-сигнала, и передается на мобильную станцию.
Блок 270 выбора шаблона пилот-сигнала выбирает шаблон пилот-сигнала дополнительно с учетом схемы модуляции, выбранной в блоке 290 выбора СМК, в дополнение к трем параметрам (дисперсия задержки, скорость движения мобильной станции и помехи от других сотовых ячеек), описанным в первом варианте осуществления. Способ выбора описан ниже.
На фиг.10 представлена блок-схема основной части мобильной станции согласно второму варианту осуществления изобретения. Конфигурация мобильной станции согласно данному варианту осуществления аналогична конфигурации в первом варианте осуществления (фиг.4), за исключением того, что информация о СМК, декодированная в блоке 360 декодирования, выводится в блок 400 кодирования и блок 410 модуляции и что скорость кодирования в блоке 400 кодирования и частота модуляции в блоке 410 модуляции управляются в соответствии с информацией о СМК. Другими словами, мобильная станция кодирует данные для передачи на базовую станцию со скоростью кодирования, указанной информацией о СМК, и модулирует данные по схеме модуляции, указанной информацией о СМК.
Ниже описан выбор шаблона пилот-сигнала в данном варианте осуществления. Существует два способа выбора шаблона пилот-сигнала с учетом схемы модуляции: способ (ниже упоминаемый как первый способ выбора) выбора шаблона пилот-сигнала в соответствии с фиг.8, используя значения, полученные посредством добавления смещения, определенного на основе схемы модуляции, к значению измерения дисперсии задержки и значению оценки скорости движения, и другой способ (ниже упоминаемый как второй способ выбора) вставки некоторого количества пилот-символов, определенных на основе схемы модуляции, между блоками пилот-символа в шаблоне пилот-сигнала, определенного согласно фиг.8.
Первый способ выбора
В случае первого способа выбора конфигурация блока 270 выбора шаблона пилот-сигнала соответствует показанному на фиг.11. Блок 270 выбора шаблона пилот-сигнала, показанный на фиг.11, реализуется с конфигурацией по первому варианту осуществления (фиг.3) и дополнительно с блоком 271 добавления смещения.
Блок 271 добавления смещения принимает информацию о СМК от блока 290 выбора СМК. Блок 271 добавления смещения добавляет смещение в соответствии со схемой модуляции, указанной информацией о СМК, к дисперсии задержки из блока 272 измерения дисперсии задержки и к скорости движения из блока 274 оценки скорости движения. Смещение имеет большее значение при более высоком уровне модуляции. Другими словами, смещение для 64-КАМ больше, чем смещение для 16-КАМ, и смещение для 16-КАМ больше, чем смещение для квадратурной фазовой модуляции (КФМ). Кроме того, смещение для КФМ может быть установлено на ноль. Далее, можно использовать различные значения для смещения, добавляемого к скорости движения, и смещения, добавляемого к дисперсии задержки. Дисперсия задержки и скорость движения с добавленным к ним смещением выводятся в блок 278 генерирования информации о шаблоне пилот-сигнала.
На основе дисперсии задержки и скорости движения с добавленным к ним смещением блок 278 генерирования информации о шаблоне пилот-сигнала выполняет определение при помощи порогов, как описано в первом варианте осуществления (фиг.8), и выбирает шаблон пилот-сигнала. Поскольку смещение больше при более высоком уровне модуляции, то когда выбирается шаблон пилот-сигнала, доля пилот-символов в кадре, т.е. плотность пилот-символов увеличивается при более высоком уровне модуляции.
Второй способ выбора
В случае второго способа выбора конфигурация блока 270 выбора шаблона пилот-сигнала соответствует показанной на фиг.12. Блок 270 выбора шаблона пилот-сигнала, показанный на фиг.12, реализуется с конфигурацией по первому варианту осуществления (фиг.3) и дополнительно с блоком 273 определения пилот-сигнала для вставки.
Блок 273 определения пилот-сигнала для вставки принимает информацию о СМК от блока 290 выбора СМК. На основе схемы модуляции, указанной информацией о СМК, блок 273 определения пилот-сигнала для вставки определяет количество пилот-символов для вставки между блоками пилот-символа. Это количество увеличивается при увеличении уровня модуляции. Другими словами, это количество для 64-КАМ больше, чем для 16-КАМ, и это количество для 16-КАМ больше, чем для КФМ. Определенное количество символов выводится в блок 278 генерирования информации о шаблоне пилот-сигнала.
Блок 278 генерирования информации о шаблоне пилот-сигнала выбирает шаблон пилот-сигнала, полученный в результате дополнительной вставки некоторого количества пилот-символов, определенных в блоке 273 определения пилот-сигнала для вставки, в шаблон пилот-сигнала, выбранный в результате определения при помощи порогов, как описано в первом варианте осуществления (фиг.8). Например, когда скорость движения равна Тс или больше и меньше, чем Td, и дисперсия задержки равна Та или больше и меньше, чем Tb, то сначала выбирается шаблон 5 на фиг.8. Затем, например, в случае, когда заранее определяется некоторое количество для вставки, так что это количество для КФМ равно нулю, для 16-КАМ равно единице и для 64-КАМ равно двум, шаблоны пилот-сигнала, выбранные для схем модуляции, показаны на фиг.13. Другими словами, в случае, если схемой модуляции является КФМ, так как количество символов для вставки равно нулю, то выбирается шаблон 5 на фиг.8 без изменения. Далее, в случае, если схемой модуляции является 16-КАМ и так как количество символов для вставки равно единице, то выбирается такой шаблон, что один пилот-символ дополнительно вставляется между блоками пилот-символа в шаблоне 5 на фиг.8. Кроме того, в случае, если схемой модуляции является 64-КАМ и количеством символов для вставки является два, то выбирается такой шаблон, что два пилот-символа дополнительно вставляются между блоками пилот-символа в шаблоне 5 на фиг.8. Поскольку количество пилот-символов для вставки увеличивается по мере увеличения уровня модуляции, то когда шаблон пилот-сигнала выбирается, увеличивается доля пилот-символов в кадре (т.е. плотность пилот-символов), когда уровень модуляции является более высоким.
В случае модуляции КАМ, такой как 16-КАМ и 64-КАМ, как описано выше, поскольку при демодуляции выполняется оценка по амплитуде и по фазе, характеристика вероятности ошибки значительно улучшается за счет реагирования, по меньшей мере, на изменения амплитуды. Другими словами, при модуляции КАМ требуется только минимальное количество пилот-символов для реагирования на изменение амплитуды. Поэтому во втором способе выбора, как показано на фиг.13, блок пилот-символа для вставки в случае схемы модуляции 16-КАМ и 64-КАМ может быть уменьшен по сравнению с блоком пилот-символа в шаблоне пилот-сигнала (фиг.8), выбранном на основе скорости движения и дисперсии задержки. Таким образом, можно предотвратить ухудшение эффективности передачи данных вследствие увеличения доли пилот-символов в кадре.
Кроме того, как в первом способе выбора, так и во втором способе выбора, как и в первом варианте осуществления, можно управлять долей пилот-символов в кадре дополнительно с учетом помех от других сотовых ячеек.
Таким образом, согласно данному варианту осуществления, так как доля пилот-символов в кадре изменяется в соответствии со схемой модуляции, можно выбирать шаблон пилот-сигнала для передачи оптимальных, необходимых и достаточных пилот-символов в соответствии со схемой модуляции.
Третий вариант осуществления
Первый и второй варианты осуществления описывают передачу пилот-символа по каналу восходящей линии связи от мобильной станции на базовую станцию. Данный вариант осуществления описывает передачу пилот-символа по каналу нисходящей линии связи от базовой станции на мобильную станцию. Далее, в данном варианте осуществления предполагается, что базовая станция и мобильная станция осуществляют связь в системе OFDM, как и в первом и втором вариантах осуществления, и, кроме того, осуществляют связь для каждого временного интервала в качестве основы блока передачи.
На фиг.14 представлена блок-схема основной части базовой станции согласно третьему варианту осуществления. На фиг.14 конструктивные элементы, одинаковые с конструктивными элементами первого варианта осуществления (фиг.2), обозначены одинаковыми ссылочными позициями и дополнительно не описываются.
Блоки 100-1-100-К кодирования и блоки 110-1-110-К модуляции выполняют кодирование и модуляцию данных 1-К передачи на мобильной станции 1-К, соответственно. Модулированные данные 1-К передачи выводятся в блок 180 назначения временного интервала.
Информация о шаблоне, вводимая в блок 120 кодирования, представляет собой информацию для уведомления мобильной станции о том, какой шаблон пилот-сигнала установлен для каждого временного интервала, составляющего один кадр. Информация о шаблоне кодируется в блоке 120 кодирования, модулируется в блоке 130 модуляции и выводится в блок 180 назначения временного интервала.
Как показано на фиг.15, блок 270 выбора шаблона пилот-сигнала состоит из блока 272 измерения дисперсии задержки, блока 274 оценки скорости движения и блока 278 генерирования информации о шаблоне пилот-сигнала и, на основе дисперсии задержки и скорости движения каждой мобильной станции, выбирает шаблон пилот-сигнала пилот-символа для передачи по каналу нисходящей линии связи для каждой мобильной станции. Способ выбора описан ниже. Информация о шаблоне пилот-сигнала, генерируемая в блоке 278 генерирования информации о шаблоне пилот-сигнала, выводится в блок 180 назначения временного интервала.
Блок 180 назначения временного интервала определяет, какому временному интервалу в кадре назначаются данные передачи для какой мобильной станции, в соответствии с шаблоном пилот-сигнала для каждой мобильной станции, выбранным в блоке 270 выбора шаблона пилот-сигнала. Способ назначения описан ниже. Затем блок 180 назначения временного интервала вводит информацию о назначении, указывающую, какому временному интервалу назначаются данные передачи для какой мобильной станции, в блок 120 кодирования. Информация о назначении кодируется в блоке 120 кодирования, модулируется в блоке 130 модуляции и вводится в блок 180 назначения временного интервала. Блок 180 назначения временного интервала назначает данные 1-К передачи, соответственно, мобильным станциям 1-К, информацию о шаблоне и информацию о назначении каждому временному интервалу в кадре и последовательно выводит назначенные каждому временному интервалу такие данные и информацию в блок 190 мультиплексирования.
Блок 190 мультиплексирования мультиплексирует данные 1-К передачи, информацию о шаблоне, информацию о назначении и пилот-символы в соответствии с шаблоном пилот-сигнала на основе временного интервала. Каждый мультиплексированный временной интервал подвергается обратному быстрому преобразованию Фурье в блоке 150 ОБПФ.
На фиг.16 представлена блок-схема основной части мобильной станции в соответствии с третьим вариантом осуществления изобретения. Конфигурация мобильной станции в соответствии с данным вариантом осуществления аналогична конфигурации в первом варианте осуществления (фиг.4), за исключением того, что информация о шаблоне пилот-сигнала, декодируемая в блоке 360 декодирования, вводится в блок 330 выделения пилот-сигнала и что в соответствии с введенной информацией о шаблоне пилот-сигнала блок 330 выделения пилот-сигнала выделяет пилот-символы из данных с блока 320 БПФ.
Ниже описаны выбор шаблона пилот-сигнала и назначение временного интервала в данном варианте осуществления. Кроме того, в нижеследующем описании предполагается, что один кадр состоит из восьми временных интервалов (TS1-TS8) и что назначение каждого временного интервала выполняется для каждого кадра. Кроме того, количество временных интервалов, составляющих один кадр, не ограничивается восемью.
Как показано на фиг.17, каждый временной интервал (TS1-TS8), составляющий один кадр, устанавливается для шаблона пилот-сигнала, как показано на фиг.8. Кроме того, в данном случае шаблон пилот-сигнала, показанный на фиг.8, представляет размещение пилот-символов в каждом временном интервале. Информация о шаблоне представляет собой информацию для указания, какой шаблон пилот-сигнала среди шаблонов 1-8 пилот-сигнала устанавливается на каждом временном интервале TS1-TS8. Кроме того, шаблон пилот-сигнала для каждого временного интервала может устанавливаться заранее и быть фиксированным или изменяться для каждого кадра в соответствии с количеством мобильных станций, для которых выбирается шаблон пилот-сигнала, качеством канала и т.п. Далее одинаковый шаблон пилот-сигнала может устанавливаться для множества временных интервалов.
В блоке 270 выбора шаблона пилот-сигнала для каждой мобильной станции блок 272 измерения дисперсии задержки измеряет дисперсию задержки и блок 274 оценки скорости движения оценивает скорость движения. В данном варианте осуществления, так как передача данных от каждой мобильной станции по каналу восходящей линии связи также выполняется с разделением времени на основе временных интервалов, блок 270 выбора шаблона пилот-сигнала может измерять дисперсию задержки и скорость движения для каждой мобильной станции. На основе дисперсии задержки и скорости движения блок 278 генерирования информации о шаблоне пилот-сигнала выполняет определение при помощи порогов, как описано в первом варианте осуществления (фиг.8), и выбирает шаблон пилот-сигнала для каждой мобильной станции. В этот момент блок 278 генерирования информации о шаблоне пилот-сигнала выбирает шаблон пилот-сигнала для каждой мобильной станции из шаблонов пилот-сигнала, исключая шаблон 8. Как описано выше, шаблон 8 имеет наилучший отклик на изменения в среде распространения из шаблонов 1-8 и поэтому устанавливается на TS1, который представляет собой временной интервал в начале кадра, предназначенный для использования в качестве шаблона пилот-сигнала информации о шаблоне и информации о назначении. Кроме того, когда дисперсия задержки равна предопределенному порогу Tb или больше и скорость движения равна или больше, чем предопределенный порог Тс на фиг.8, предполагается, что блок 278 генерирования информации о шаблоне пилот-сигнала выбирает шаблон 6 вместо шаблона 8. В нижеследующем описании предполагается, что существует пять мобильных станций 1-5 (MS1-5), шаблон 6 выбирается для мобильных станций 1 и 2 (MS1 и MS2), шаблон 5 выбирается для мобильных станций 3 и 4 (MS3 и MS4), и шаблон 3 выбирается для мобильной станции 5 (MS5). Таким образом, можно одновременно выбрать один шаблон пилот-сигнала для множества мобильных станций, так что множество мобильных станций могут совместно использовать один шаблон пилот-сигнала. Затем информация о шаблоне пилот-сигнала, указывающая результат выбора, вводится в блок 180 назначения временного интервала.
В соответствии с шаблоном пилот-сигнала, выбранным для каждой мобильной станции в блоке 270 выбора шаблона пилот-сигнала, блок 180 назначения временного интервала назначает данные передачи каждому временному интервалу для каждой мобильной станции. Другими словами, данные 1 передачи для мобильной станции 1, для которой выбран шаблон 6, назначаются интервалу TS3, для которого установлен шаблон 6. Одновременно данные 2 передачи для мобильной станции 2, для которой выбран шаблон 6, назначаются интервалу TS3, данные 3 и 4 передачи для мобильных станций 3, 4, для которых выбран шаблон 5, назначаются интервалу TS4, для которого устанавливается шаблон 5, и данные 5 передачи для мобильной станции 5, для которой выбран шаблон 3, назначаются интервалу TS6, для которого устанавливается шаблон 3. Таким образом, в результате выбора одновременно одного шаблона пилот-сигнала для множества мобильных станций данные передачи на множество мобильных станций назначаются одному временному интервалу.
Далее информация о назначении, указывающая на результат назначения, и информация о шаблоне всегда назначаются интервалу TS1, который является первым временным интервалом, для которого установлен шаблон 8. Информация о назначении и информация о шаблоне, необходимая для приема всеми мобильными станциями в сотовой ячейке, более важная информация, чем данные абонента, и поэтому требует использования шаблона пилот-сигнала, так что достаточное количество пилот-символов конфигурируется как в частотной области, так и во временной области. Посредством приема TS1 каждой мобильной станции становится известно, в каком временном интервале и в каком шаблоне пилот-сигнала передаются данные для мобильной станции.
В соответствии с одним из шаблонов 1-8 пилот-сигнала, установленным для каждого временного интервала, блок 190 мультиплексирования мультиплексирует данные передачи и пилот-символы. Далее, когда данные передачи на множество мобильных станций назначаются одному временному интервалу, блок 190 мультиплексирования мультиплексирует множество элементов данных передачи. Данные передачи мультиплексируются, например, используя схему непосредственного расширения, схему скачкообразной перестройки частоты и т.п. Следовательно, на интервале TS3 мультиплексируются данные 1 передачи для мобильной станции 1, данные 2 передачи для мобильной станции 2 и пилот-символы в соответствии с шаблоном 6. Аналогично на интервале TS4 мультиплексируются данные 3 передачи для мобильной станции 3, данные 4 передачи для мобильной станции 4 и пилот-символы в соответствии с шаблоном 5, и на интервале TS6 мультиплексируются данные 5 передачи для мобильной станции 5 и пилот-символы в соответствии с шаблоном 3.
Таким образом, в данном варианте осуществления при передаче пилот-символов по каналу нисходящей линии связи различные шаблоны пилот-сигнала устанавливаются для временного интервала, и в соответствии с шаблонами пилот-сигнала, выбранными согласно среде распространения для каждой мобильной станции, данные передачи назначаются каждому временному интервалу. Таким образом, пилот-символы в общем шаблоне пилот-сигнала могут передаваться на множество мобильных станций в одном и том же состоянии среды распространения, и, таким образом, можно повысить эффективность передачи по каналу нисходящей линии связи.
Кроме того, как в мобильных станциях, так и в базовых станциях изобретение может применяться ко всем устройствам радиосвязи, используемым в системах радиосвязи, где пилот-символы используются для оценки среды распространения и т.п.
Каждый из функциональных блоков, используемых в описании каждого вышеупомянутого варианта осуществления, реализуется обычно в виде большой интегральной схемы (БИС), которая представляет собой интегральную схему. Эти блоки могут конфигурироваться в виде одного кристалла, или один кристалл может включать в себя часть или все блоки.
В данном описании предполагается БИС, но схема может упоминаться как интегральная схема (ИС), системная БИС, сверхбольшая ИС, ИС со степенью интеграции выше сверхвысокой и т.д. в зависимости от степени интеграции.
Далее, способ интеграции схем не ограничивается БИС и может быть реализован специализированной схемой или процессором общего назначения. Можно использовать программируемую логическую матрицу (ПЛМ) типа FPGA, позволяющую выполнять программирование после производства БИС, реконфигурируемый процессор, позволяющий выполнять реконфигурацию соединения или установки в элементе схемы внутри БИС, или т.п.
Кроме того, с развитием полупроводниковой техники, если появится метод для интегральных схем, заменяющий БИС, или другой производный метод, то функциональные блоки естественно будут интегрироваться с использованием такого метода. Возможны адаптация и т.п. в отношении биотехнологии.
Первый аспект устройства радиосвязи согласно изобретению соответствует конфигурации, предусматривающей получателя, который получает параметр, содержащий индикатор среды распространения, в которой передаются пилот-символы; селектор шаблона пилот-сигнала, который выбирает шаблон пилот-сигнала, указывающий положения пилот-символов в частотной области и во временной области в соответствии с полученным параметром; и передатчик, который передает сигнал, включающий в себя информацию о выбранном шаблоне пилот-сигнала.
В соответствии с данной конфигурацией, поскольку шаблон пилот-сигнала в частотной области и во временной области выбирается в соответствии с параметром в качестве индикатора среды распространения, и передается информация о шаблоне пилот-сигнала, то необходимо только уведомить сторону, осуществляющую связь, для которой выбирается шаблон пилот-сигнала, в качестве обратной связи, и, таким образом, можно препятствовать увеличению объема информации обратной связи. Одновременно сторона, осуществляющая связь, может передавать оптимальный пилот-символ, соответствующий среде распространения, и можно поддерживать минимальным воздействие информации обратной связи на пропускную способность канала без снижения эффективности передачи информации в результате передачи пилот-символа.
Второй аспект устройства радиосвязи согласно изобретению соответствует конфигурации, в которой получатель имеет измеритель величины помех, который измеряет величину помех, вызванных сигналами, передаваемыми от устройств радиосвязи, исключая сторону, осуществляющую связь, или многолучевыми сигналами; и селектор шаблона пилот-сигнала выбирает шаблон пилот-сигнала, при этом доля пилот-символов увеличивается с увеличением величины помех.
В соответствии с данной конфигурацией, поскольку шаблон пилот-сигнала выбирается так, что доля пилот-символов в кадре увеличивается с увеличением величины помех, можно предотвратить ухудшение качества приема из-за помех от других устройств радиосвязи и помех, обусловленных многолучевым распространением, повысить точность оценки канала и правильно демодулировать символы данных.
Третий аспект устройства радиосвязи согласно изобретению соответствует конфигурации, в которой измеритель величины помех измеряет величину помех, используя пилот-символы, содержащиеся в принимаемом сигнале.
В соответствии с данной конфигурацией, поскольку величина помех измеряется с использованием пилот-символов, содержащихся в принимаемом сигнале, то можно точно измерять величину помех посредством сравнения с известным пилот-символом.
Четвертый аспект устройства радиосвязи согласно изобретению соответствует конфигурации, в которой получатель имеет измеритель дисперсии задержки, который измеряет дисперсию задержки, указанную задержанным принимаемым сигналом; и селектор шаблона пилот-сигнала выбирает шаблон пилот-сигнала, при этом пилот-символы плотно размещаются в частотной области при увеличении дисперсии задержки.
В соответствии с данной конфигурацией, поскольку шаблон пилот-сигнала выбирается так, что пилот-символы плотно размещаются в частотной области, когда дисперсия задержки увеличивается, даже когда дисперсия задержки велика, и изменения в частотно-селективном замирании являются интенсивными, можно повысить точность оценки канала и правильно демодулировать символы данных, мультиплексированные, например, на поднесущих с разными частотами.
Пятый аспект устройства радиосвязи согласно изобретению соответствует конфигурации, в которой измеритель дисперсии задержки генерирует профиль задержки принимаемого сигнала и измеряет дисперсию задержки.
В соответствии с данной конфигурацией, поскольку генерируется профиль задержки принимаемого сигнала и измеряется дисперсия задержки, то можно точно измерять дисперсию задержки каждый раз, когда принимается сигнал.
Шестой аспект устройства радиосвязи согласно изобретению соответствует конфигурации, в которой измеритель дисперсии задержки заранее сохраняет дисперсию задержки, соответствующую форме сотовой ячейки, к которой принадлежит устройство.
В соответствии с данной конфигурацией, поскольку дисперсия задержки, соответствующая форме сотовой ячейки, к которой принадлежит устройство, сохранена заранее, можно уменьшить количество вычислений для измерения дисперсии задержки и повысить скорость обработки.
Седьмой аспект устройства радиосвязи согласно изобретению соответствует конфигурации, в которой получатель имеет блок оценки скорости движения, который оценивает скорость движения устройства или стороны, осуществляющей связь, и селектор шаблона пилот-сигнала выбирает шаблон пилот-сигнала таким образом, что пилот-символы плотно размещаются во временной области, когда скорость движения увеличивается.
В соответствии с данной конфигурацией, поскольку шаблон пилот-сигнала выбирается так, что пилот-символ плотно конфигурируется во временной области, когда скорость движения становится высокой, то даже когда скорость движения высока и временные изменения замирания интенсивны, можно повысить точность оценки канала и правильно демодулировать символы данных.
Восьмой аспект устройства радиосвязи согласно изобретению соответствует конфигурации, в которой блок оценки скорости движения оценивает скорость движения на основе изменения принимаемой мощности пилот-символов, содержащихся в принимаемом сигнале.
В соответствии с данной конфигурацией, так как скорость движения оценивается на основе изменения принимаемой мощности пилот-символов, содержащихся в принимаемом сигнале, можно точно оценивать скорость движения при малом объеме вычислений.
Девятый аспект устройства радиосвязи согласно изобретению соответствует конфигурации, в которой дополнительно предусмотрен селектор схемы модуляции, который выбирает схему модуляции данных, передаваемых от стороны, осуществляющей связь, при этом селектор шаблона пилот-сигнала выбирает шаблон пилот-сигнала, соответствующий параметру и уровню модуляции схемы модуляции, выбранной в селекторе схемы модуляции.
Десятый аспект устройства радиосвязи согласно изобретению соответствует конфигурации, в которой селектор шаблона пилот-сигнала выбирает шаблон пилот-сигнала, при этом пилот-символы плотно размещаются во временной области или в частотной области при увеличении уровня модуляции схемы модуляции, выбранной в селекторе схемы модуляции.
Одиннадцатый аспект устройства радиосвязи согласно изобретению соответствует конфигурации, в которой дополнительно предусмотрен сумматор, который прибавляет к параметру смещение со значением, которое изменяется в зависимости от уровня модуляции схемы модуляции, выбранной в селекторе схемы модуляции, при этом селектор шаблона пилот-сигнала выбирает шаблон пилот-сигнала в соответствии с параметром с добавленным к нему смещением.
Двенадцатый аспект устройства радиосвязи согласно изобретению соответствует конфигурации, в которой селектор шаблона пилот-сигнала выбирает шаблон пилот-сигнала, полученный посредством дополнительной вставки некоторого количества пилот-символов в соответствии с уровнем модуляции схемы модуляции, выбранной в селекторе схемы модуляции, в шаблон пилот-сигнала, выбранный в соответствии с параметром.
В соответствии с данными конфигурациями, так как доля пилот-символов изменяется с зависимости от схемы модуляции, можно выбирать шаблон пилот-сигнала для передачи оптимальных, необходимых и достаточных пилот-символов в соответствии со схемой модуляции.
Тринадцатый аспект устройства радиосвязи согласно изобретению соответствует конфигурации, в которой передатчик передает сигнал, содержащий пилот-символы, размещенные в соответствии с шаблоном пилот-сигнала, установленным для каждого временного интервала, и селектор шаблона пилот-сигнала выбирает шаблон пилот-сигнала для каждой из множества сторон, осуществляющих связь.
Четырнадцатый аспект устройства радиосвязи согласно изобретению соответствует конфигурации, в которой дополнительно предусмотрено средство назначения, которое назначает временной интервал каждой из множества сторон, осуществляющих связь, на основе шаблона пилот-сигнала, выбранного в селекторе шаблона пилот-сигнала.
В соответствии с данными конфигурациями, так как общий шаблон пилот-сигнала пилот-символа может передаваться множеству сторон, осуществляющих связь, в одинаковом состоянии среды распространения, можно повысить эффективность передачи по каналу нисходящей линии связи.
Первый аспект способа передачи пилот-символа согласно изобретению содержит этапы получения параметра, содержащего индикатор среды распространения, в которой передаются пилот-символы; выбора шаблона пилот-сигнала, указывающего положения пилот-символов в частотной области и во временной области в соответствии с полученным параметром; и передачи сигнала, включающего в себя информацию о выбранном шаблоне пилот-сигнала.
В соответствии с данным способом, поскольку шаблон пилот-сигнала в частотной области и во временной области выбирается в соответствии с параметром в качестве индикатора среды распространения и передается информация о шаблоне пилот-сигнала, требуется только выполнить уведомление стороны, осуществляющей связь, для которой выбирается шаблон пилот-сигнала, посредством обратной связи, и, таким образом, можно предотвратить увеличение объема информации обратной связи. Одновременно сторона, осуществляющая связь, может передавать оптимальные пилот-символы, соответствующие среде распространения, и можно поддерживать минимальным воздействие информации обратной связи на пропускную способность канала без снижения эффективности передачи информации в результате передачи пилот-символа.
Данная заявка основывается на заявках на патент Японии № 2003-292667, поданной 12 августа 2003 г., и № 2004-162388, поданной 31 мая 2004 г., все содержимое которых в явном виде включено в данное описание посредством ссылки.
Промышленная применимость
Устройство радиосвязи и способ передачи пилот-символа согласно изобретению позволяют поддерживать минимальным воздействие информации обратной связи на пропускную способность канала без снижения эффективности передачи информации в результате передачи пилот-символа и являются полезными в качестве устройства радиосвязи и способа передачи пилот-символа, используемых в системе радиосвязи, в которой индивидуальный пилот-символ передается для каждого абонента.

Изобретение относится к области радиосвязи и может быть использовано в системе радиосвязи, в которой индивидуальный пилот-символ передается каждому абоненту. Достигаемый технический результат - поддержание минимальным воздействия информации обратной связи на пропускную способность канала без снижения эффективности передачи информации в результате передачи пилот-символов. Устройство радиосвязи содержит получатель, который получает параметр, содержащий индикатор среды распространения, в которой передаются пилот-символы, селектор шаблона пилот-сигнала, который выбирает шаблон пилот-сигнала, указывающий положения пилот-символов в частотной области и во временной области в соответствии с полученным параметром, и передатчик, который передает сигнал, включающий в себя информацию о выбранном шаблоне пилот-сигнала. Получатель имеет или измеритель величины помех, или измеритель дисперсии задержки, или блок оценки скорости движения. Способ передачи пилот-символа основан на получении параметра, содержащего индикатор среды распространения, в которой передаются пилот-символы, выборе шаблона пилот-сигнала, указывающего положения пилот-символов в частотной области и во временной области в соответствии с полученными параметрами, и передаче сигнала, включающего в себя информацию о выбранном шаблоне пилот-сигнала. 2 н. и 13 з.п. ф-лы, 17 ил.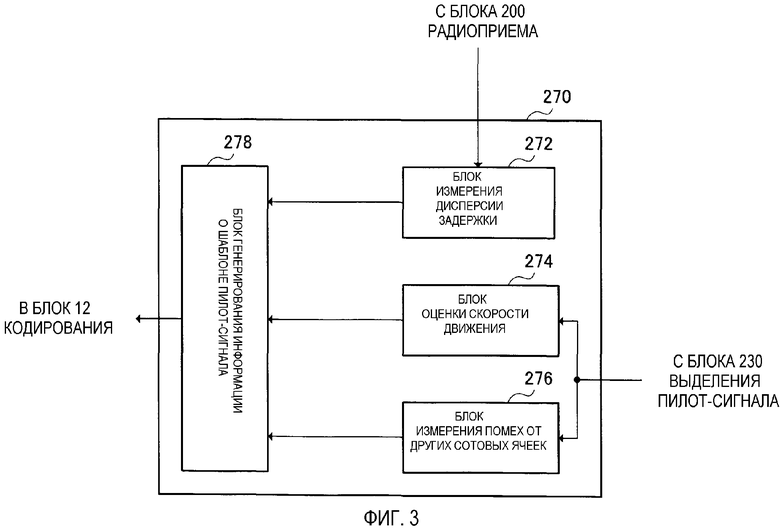
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОБЕСПЕЧЕНИЯ ВЫБОРОЧНОГО РАЗНЕСЕНИЯ ПЕРЕДАЧИ В СИСТЕМЕ ПОДВИЖНОЙ СВЯЗИ | 1999 |
|
RU2193279C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ПЕРЕДАЧИ ШАБЛОНА БИТОВ УПРАВЛЕНИЯ МОЩНОСТЬЮ СООТВЕТСТВЕННО ПЕРЕДАЮЩЕЙ АНТЕННЕ В СИСТЕМЕ МОБИЛЬНОЙ СВЯЗИ | 1999 |
|
RU2182747C2 |
| US 4991184, 05.02.1991 | |||
| US 5907563 А, 25.05.1999 | |||
| Устройство для приготовления и отпуска напитков | 1982 |
|
SU1056238A1 |

