Изобретение относится к радиолокации, может быть использовано в аппаратуре обнаружения движущихся целей на фоне пассивных помех.
Известен когерентно-импульсный радиолокатор [1, с.391], содержащий генератор, импульсный модулятор, четыре смесителя, когерентный гетеродин, два усилителя промежуточной частоты и гетеродин. В радиолокаторе реализуется запоминание случайной начальной фазы зондирующего импульса на промежуточной частоте с помощью когерентного гетеродина. Генерируемые колебания когерентного гетеродина используются в качестве опорных для детектирования отраженных эхо-сигналов. Для компенсации движения отражателей (пассивной помехи) относительно радиолокатора частота эхо-сигнала может изменяться с помощью гетеродина и смесителя (схемы компенсации скорости ветра), включенных в тракт принимаемого сигнала. Радиолокатор обеспечивает выделение полезных сигналов движущихся целей на фоне пассивных помех. Недостатком устройства является необходимость постоянно отслеживать изменение частоты пассивной помехи, управляя схемой компенсации скорости ветра, что ухудшает качество подавления помехи.
Известен также селектор движущихся целей с внешней когерентностью [2, с.338], содержащий две линии задержки на длительность зондирующего импульса, фазовый детектор, два сумматора, линию задержки на период следования зондирующих импульсов, два ограничителя. В этом устройстве фаза сигнала от цели сравнивается с фазой сигнала помех в соседней ячейке дальности. Устройство автоматически учитывает движение отражателей (пассивной помехи) относительно радиолокатора. Недостатком устройства является наличие передней кромки пассивной помехи на ее выходе.
Наиболее близким по технической сущности (прототипом к предлагаемому изобретению) является устройство селекции движущихся целей на фоне пассивных помех [3, с.184], содержащее последовательно соединенные линию задержки на период повторения, вычитающее устройство, первый перемножитель, интегратор, второй перемножитель, выход которого подключен к второму входу вычитающего устройства, а второй вход соединен с входом линии задержки на период повторения, с вторым входом первого перемножителя и является входом устройства, а выход вычитающего устройства - выходом устройства.
Отраженный эхо-сигнал поступает на второй вход первого перемножителя, на первый вход которого через вычитающее устройство приходит сигнал с линии задержки на период повторения, принятый в предыдущем периоде зондирования. Первый перемножитель и интегратор образуют коррелятор, вырабатывающий весовой коэффициент межпериодной корреляции пассивной помехи. Входной сигнал умножается во втором перемножителе на весовой коэффициент и поступает на вычитающее устройство, где вычитается из сигнала, задержанного на период.
В данном устройстве СДЦ происходит череспериодное вычитание с весовыми коэффициентами, пропорциональными нормированной функции межпериодной корреляции помехи. Наличие корреляционной обратной связи позволяет устройству самонастраиваться на характеристики помехи и, в частности, адаптироваться к изменению скорости ее движения. Однако за время формирования весового коэффициента на выход устройства успевает пройти часть помехи - «передняя кромка».
Таким образом, недостатком прототипа является наличие передней кромки пассивной помехи на его выходе.
Задача, на решение которой направлено заявляемое устройство, состоит в подавлении передней кромки помехи.
Технический результат заключается в повышении вероятности селекции движущихся целей.
Технический результат достигается тем, что в устройство, содержащее линию задержки на период повторения, первое вычитающее устройство, первый перемножитель, интегратор, второй перемножитель, дополнительно введены схема совпадения, последовательно соединенные первая линия задержки, первый детектор, первое пороговое устройство, выход которого соединен с первым входом схемы совпадения, последовательно соединенные второй детектор, второе пороговое устройство, выход которого соединен со вторым входом схемы совпадения, выход которой подключен к управляющему входу ключа, выход которого через блок памяти соединен с первым входом третьего перемножителя, второй вход которого подключен к выходу первой линии задержки, а выход - к первому входу второго вычитающего устройства, второй вход которого соединен с выходом второй линии задержки, вход первой линии задержки подключен к входу линии задержки на период повторения, а вход второй линии задержки - к выходу линии задержки на период и входу второго детектора, выход второго вычитающего устройства является выходом устройства.
Сущность изобретения основана на задержке эхо-сигналов, принятых в смежных периодах зондирования на время формирования весового коэффициента их межпериодной корреляции и последующего запоминания его значения на время действия сигнала.
Структурная схема предложенного устройства приведена на чертеже.
Предложенное устройство селекции движущихся целей (СДЦ) состоит из первого перемножителя 1, интегратора 2, второго перемножителя 3, первого вычитающего устройства 4, линии задержки на период повторения 5, второго детектора 6, второго порогового устройства 7, схемы совпадения 8, ключа 9, первой линии задержки 10, второй линии задержки 11, первого детектора 12, первого порогового устройства 13, блока памяти 14, третьего перемножителя 15, второго вычитающего устройства 16, соединенных, как показано на чертеже. Назначения элементов схемы ясны из их названия.
Устройство работает следующим образом.
Отраженный эхо-сигнал поступает на второй вход первого перемножителя 1, на первый вход которого через первое вычитающее устройство 4 приходит сигнал с линии задержки на период повторения 5, принятый в предыдущем периоде зондирования. Первый перемножитель 1 и интегратор 2 образуют коррелятор, вырабатывающий весовой коэффициент межпериодной корреляции пассивной помехи. Входной сигнал умножается во втором перемножителе 3 на весовой коэффициент и поступает на второй вход первого вычитающего устройства, где вычитается из сигнала, задержанного на период. Значение весового коэффициента с выхода интегратора 2 поступает через ключ 9 в блок памяти 14. Входной эхо-сигнал поступают на первую линию задержки 10, а сигнал, задержанный линией задержки на период повторения 5, - на вторую линию задержки 11. Время задержки в первой линии задержки 10 и второй линии задержки 11 соответствует времени настройки компенсатора. К моменту поступления помехи на входы второго вычитающего устройства на выходе интегратора 2 будет сформирован весовой коэффициент, пропорциональный нормированной функции межпериодной корреляции помехи. Значение весового коэффициента с выхода интегратора 2 поступает через открытый ключ 9 и блок памяти 14 на третий перемножитель 15. Входной сигнал с первой линии задержки 10 умножается на весовой коэффициент и вычитается из сигнала задержанного второй линией задержки 11. Управление ключом 9 осуществляется выходным сигналом схемы совпадения 8. На первый вход схемы совпадения 8 приходит сигнал с выхода первой линии задержки 10, прошедший первый детектор 12 и первое порогового устройство 13, а на второй вход схемы совпадения 8 приходит сигнал с выхода линии задержки на период 5, прошедший второй детектор 6 и второе пороговое устройство 7. Схема совпадения 8 имеет первый вход прямой, второй - инверсный. Поэтому когда на втором входе схемы совпадения 8 отсутствует сигнал, а на первом - присутствует единичное значение, схема совпадения 8 вырабатывает сигнал управления, закрывающий ключ 9. При этом блок памяти 14 сохраняет запомненное значение весового коэффициента с выхода интегратора 2 и обеспечивает компенсацию задней кромки пассивной помехи. Эхо-сигналы, пришедшие от цели, не подавляются, так как весовые коэффициенты по ним не успевают сформироваться и проходят на выход второго 16 вычитающего устройства.
Таким образом, предложенное устройство обеспечивает выделение эхо-сигналов целей на фоне пассивных помех, подавляя переднюю кромку помехи. При этом выходной сигнал остается на радиочастоте, что может быть использовано для его дальнейшей когерентной обработки, например, при двухкратном подавлении пассивных помех.
Предложенное техническое решение является новым, поскольку из общедоступных сведений неизвестны устройства, позволяющие проводить селекцию движущихся целей (СДЦ) с подавлением передней кромки пассивных помех и сохранением амплитудно-фазовых соотношений сигналов на выходе.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы стандартное оборудование, приспособления и материалы широко распространенной технологии. Устройство может быть технически реализовано как при цифровой обработке, так и при аналоговой обработке сигналов. Схема памяти может быть выполнена на конденсаторе при аналоговой обработке сигналов либо на регистре при цифровой обработке.
Источники информации
1. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. - М.: Радио и связь, 1981. - 416 с.
2. Справочник по радиолокации. Под ред. М.Сколника, Нью-Йорк, 1970: Пер. с англ. (в четырех томах) / Под общей ред. К.Н.Трофимова; Том 3. Радиолокационные устройства и системы. - М.: Сов. радио, 1978. - 528 с.
3. Бакулев П.А., Степин В.М. Методы селекции движущихся целей.- М.: Радио и связь, 1986. - 288 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровое устройство селекции движущихся целей | 1984 |
|
SU1841294A1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2409822C1 |
| Устройство селекции движущихся целей для наземного когерентно-импульсного радиолокатора | 1983 |
|
SU1841286A1 |
| Устройство селекции движущихся целей для радиолокатора с вобуляцией периода повторения | 1984 |
|
SU1841287A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СИГНАЛА | 2012 |
|
RU2498343C1 |
| Двухканальный преобразователь допплеровских частот эхо-сигналов для двухчастотной локационной станции | 1982 |
|
SU1841290A1 |
| Адаптивная двухчастотная разностно-фазовая система селекции движущихся целей | 1982 |
|
SU1841283A1 |
| Двухчастотное устройство селекции движущихся целей | 1980 |
|
SU1841281A1 |
| Двухчастотное устройство селекции движущихся целей | 1981 |
|
SU1841282A2 |
| ПСЕВДОКОГЕРЕНТНАЯ РЛС С ВЫСОКОЙ ЧАСТОТОЙ СЛЕДОВАНИЯ ЗОНДИРУЮЩИХ ИМПУЛЬСОВ | 2014 |
|
RU2591049C2 |
Изобретение относится к радиолокации и может быть использовано в аппаратуре обнаружения движущихся целей на фоне пассивных помех. Достигаемым техническим результатом изобретения является повышение вероятности селекции движущихся целей. Указанный результат достигается за счет того, что заявленное устройство селекции движущихся целей содержит линию задержки на период повторения, два вычитающих устройства, три перемножителя, интегратор, схему совпадения, две линии задержки, два детектора, два пороговых устройства, ключ и блок памяти, определенным образом соединенные между собой. 1 ил.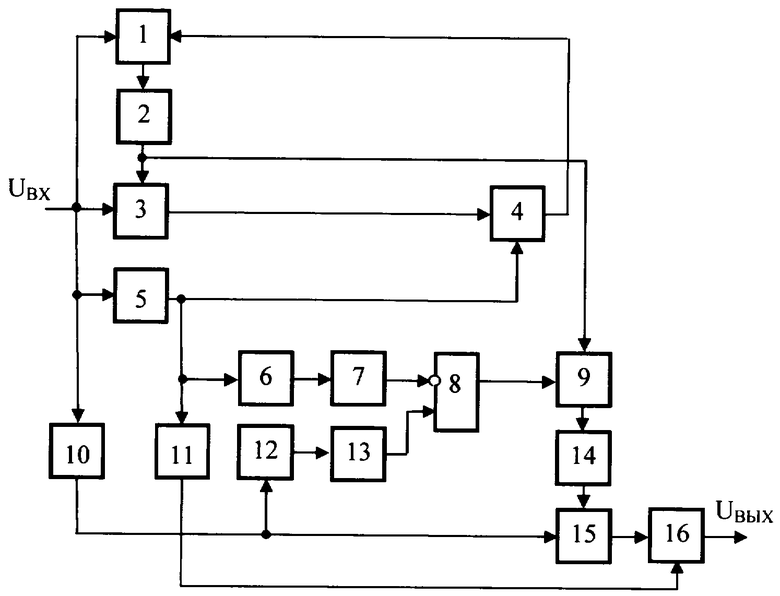
Устройство селекции движущихся целей, содержащее последовательно соединенные линию задержки на период повторения, первое вычитающее устройство, первый перемножитель, интегратор, второй перемножитель, выход которого подключен к второму входу первого вычитающего устройства, а второй вход соединен с входом линии задержки на период повторения, с вторым входом первого перемножителя и является входом устройства, при этом первый перемножитель и интегратор образуют коррелятор, вырабатывающий весовой коэффициент межпериодной корреляции пассивной помехи, отличающееся тем, что дополнительно введены схема совпадения, последовательно соединенные первая линия задержки, первый детектор, первое пороговое устройство, выход которого соединен с первым входом схемы совпадения, последовательно соединенные второй детектор, второе пороговое устройство, выход которого соединен со вторым входом схемы совпадения, выход которой подключен к управляющему входу ключа, через который в блок памяти поступает значение весового коэффициента с выхода указанного интегратора, при этом выход ключа через блок памяти соединен с первым входом третьего перемножителя, второй вход которого подключен к выходу первой линии задержки, а выход - к первому входу второго вычитающего устройства, второй вход которого соединен с выходом второй линии задержки, вход первой линии задержки подключен к входу линии задержки на период повторения, а вход второй линии задержки - к выходу линии задержки на период повторения и входу второго детектора, выход второго вычитающего устройства является выходом устройства.
| БАКУЛЕВ П.А., СТЕПИН В.М | |||
| Методы селекции движущихся целей | |||
| Москва, Радио и связь, 1986, с.184 | |||
| RU 2058033 C1, 10.04.1996 | |||
| СПОСОБ ПОДАВЛЕНИЯ ПАССИВНЫХ ПОМЕХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2227308C2 |
| УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1994 |
|
RU2091809C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1991 |
|
RU2255354C2 |
| US 2007001897 A1, 04.01.2007 | |||
| Механизм шарнирно-рычажного антипараллелограмма | 1988 |
|
SU1610150A1 |
| US 5402131 A, 28.03.1995. | |||

