Изобретение относится к области гидроакустики и предназначено для определения истинной скорости судна при калибровке лагов.
Калибровка лага, в общем случае, заключается в определении истинной Vхи и измеренной лагом (лаговой) Vхл продольных составляющих скорости судна, истинной Vуи и лаговой Vул поперечных составляющих скорости, в вычислении коэффициента лага

и угла разворота антенн
 ,
,
введение значений этих коэффициентов (поправок) в аппаратуру лага для исключения присущих данному лагу систематических погрешностей.
Известны различные способы определения истинной скорости судна [1, 2]. Суть всех способов сводится к измерению известными способами расстояния, проходимого судном, и времени прохождения этого расстояния. Большинство способов реализуется только в надводном положении.
Основным недостатком способов калибровки лагов в надводном положении является зависимость возможности ее проведения от погодных условий, волнения моря и конструктивных особенностей судна, т.к. калибровку лагов можно проводить при качке судна не более 1-2° и рыскании не более 0,3-0,4° [1, стр.194, 195].
Подводные суда могут калибровать лаги в подводном положении, где стабильность параметров движения обеспечивается проще, однако измерение пройденного расстояния сложнее. Один из таких способов реализуется при пересечении судном двух уложенных на дне кабелей, однако их укладка на дне является весьма трудоемкой и дорогостоящей операцией и возможна только в ограниченных случаях для стационарных полигонов.
Наиболее универсальным является способ калибровки в подводном положении с использованием донных маяков-ответчиков (ДМО), установка которых в любом полигоне может быть выполнена оперативно. При этом возможно многократное использование одних и тех же ДМО в разных полигонах.
Недостатком большинства известных способов определения истиной скорости является невозможность использования их при калибровке абсолютных лагов, когда требуется оценить не только продольную, но и поперечную составляющую пути (скорости).
Наиболее близким аналогом предлагаемого изобретения, выбранным в качестве прототипа, является способ, описанный в [3].
Этот способ калибровки относительных лагов характеризуется следующими операциями:
- устанавливают на дно два ДМО на расстоянии S один от другого таким образом, чтобы направление базы Пs приблизительно совпадало с направлением течения в данном районе;
- ведут судно с установленными на нем лагом и корабельной аппаратурой, предназначенной для работы с ДМО, курсом, параллельным направлению базы Пs, с заданной скоростью;
- в момент подхода к траверзу ДМО включают его с помощью корабельной аппаратуры посылкой сигнала запрос, измеряют время распространения сигналов (ВРС) Δτ от судна до ДМО и обратно [4] по сигналам ответа ДМО, излучаемым с периодом около 10 с, и регистрируют корабельное время t, соответствующее моментам приема сигналов от ДМО;
- после прохождения траверза ДМО отключают его с помощью корабельной аппаратуры и продолжают следовать постоянным курсом ко второму ДМО, при подходе к которому повторяют все перечисленные выше действия;
- определяют корабельное время t1 и t2, соответствующее моментам прохождения траверзов при минимальных значениях ВРС для первого и второго ДМО соответственно;
- по известной базе и разности времен t2-t1=Т рассчитывают истинную скорость судна.
При реализации этого способа используют два ДМО и корабельную аппаратуру (КА).
В состав ДМО входят: приемоизлучающая антенна, коммутатор приемопередачи, приемный тракт, коммутатор напряжения питания, формирователь сигналов ответа, источник питания.
В состав КА входят: приемоизлучающая антенна, коммутатор приемопередачи, формирователь тактовых импульсов, формирователь сигналов запроса, приемный тракт, измеритель времени распространения сигналов (задержки).
Устройство работает следующим образом: подают сигнал на включение ДМО №1, одновременно запускается измеритель Δτ. ДМО антенной принимает сигнал запроса, который, пройдя коммутатор и приемный тракт, включает коммутатор, через который напряжение от источника питания поступает на формирователь сигналов ответа, сигнал ответа, с которого через коммутатор и антенну излучается в воду. Сигнал ответа ДМО принимается антенной КА, усиливается приемным трактом и останавливает измеритель Δτ, на котором индицируется ВРС. Измерение ВРС может осуществляться между моментами излучения сигнала запроса и приема сигнала ответа либо между передними фронтами тактовых импульсов, формируемых в КА синхронно с формированием серии сигналов ответа в ДМО, и принятыми сигналами ответа [4].
Недостатком рассмотренного способа является невозможность использования его при калибровке лагов, измеряющих кроме продольной еще и поперечную составляющую скорости, а также влияние на его точность измерений направления и скорости течения в районе работ. Это связан с тем, что за проходимый судном путь принимают расстояние S между ДМО, что возможно при точном совпадении направления течения с направлением базы Пs и с линией пути судна. В противном случае за счет отклонения линии пути от истинного курса на угол сноса β увеличивается проходимый судном путь и появится поперечная составляющая пути и скорости.
Задачей изобретения является повышение точности калибровки за счет устранения присущих прототипу недостатков и обеспечение возможности применения способа при калибровке абсолютных лагов.
Для решения поставленной задачи при способе определения истинной скорости судна при калибровке лагов на гидроакустической траверзной мерной линии, включающем движение судна с постоянной скоростью, постоянным курсом, параллельным направлению базы, состоящей из первого и второго гидроакустических ДМО, расстояние S между которыми и направление базы известны, излучение и прием через равные промежутки времени акустических сигналов, измерение ВРС от судна до каждого из ДМО и обратно, регистрацию корабельного времени и моменты приема сигналов ответа, определение интервала времени Т между моментами прохождения судном траверзов первого и второго ДМО, которым соответствуют минимальные значения ВРС, дополнительно измеряют скорость распространения сигнала на стандартных горизонтах от поверхности воды до дна, измеряют глубину погружения приемопередающей антенны судна, глубины установки ДМО, определяют расстояния в горизонтальной плоскости от судовой приемоизлучающей антенны до каждого ДМО (d1, d2) и вычисляют продольную, поперечную и полную истинные скорости судна по формулам


Сущность способа поясняется чертежом, на котором в проекции на горизонтальную плоскость изображены:
ДМО-1, ДМО-2 - донные маяки-ответчики;
S - расстояние между ДМО;
П - пеленг с ДМО-1 на ДМО-2;
N - направление на север;
d1 и d2 - расстояния до ДМО при нахождении ДМО на траверзе судна;
ПУ - путевой угол;
ИК - истинный курс;
β - угол сноса, возникающий при воздействии на судно течения или ветра.
Расстояния от судна до ДМО d измеряют косвенным способом по результатам измерения:
- времени распространения сигналов Δτ от судна до ДМО-1 и ДМО-2 и обратно;
- заглубления антенны судна от поверхности h;
- глубин установки ДМО-1 и ДМО-2 Hi;
- скоростей звука на стандартных горизонтах [5].
Учитывая, что наибольшая точность фиксации моментов прохождения траверзов ДМО обеспечивается на наименьших расстояниях до ДМО, порядка 100-500 м, на которых рефракционные искажения траекторий акустических лучей не велики, расстояния рассчитывают по формуле
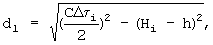
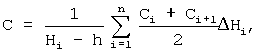
где 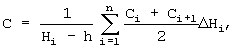
где n - количество слоев воды, в которых градиент скорости звука (равный отношению изменения скорости звука к единице расстояния [3]) постоянен;
Ci - скорость звука на границах слоя воды толщиной ΔНi [6];
Сi и Ci+1 - скорости звука на верхней и нижней границах i-го слоя воды толщиной ΔНi, в котором градиент скоростей звука постоянен соответственно.
Судно, следующее постоянным курсом, под воздействием сноса или дрейфа перемещается по линии пути, сохраняя параллельность диаметральной плоскости истинному курсу, и приобретает продольные смещения
и скорость  , а также поперечные смещения dпоп=d1-d2 и скорость
, а также поперечные смещения dпоп=d1-d2 и скорость  .
.
При этом истинная результирующая скорость судна  .
.
Таким образом, находятся истинные значения составляющих скорости судна, использование которых совместно с измеренным лагом позволяет определить коэффициент лага и угол разворота антенн [1], необходимые для осуществления калибровки абсолютных или относительных лагов.
При появившейся возможности измерения как продольной, так и поперечной составляющих скорости поперечные смещения судна не ухудшают точности измерений и процедура определения скорости судна может осуществляться не обязательно при условии параллельности направлений течения и базы, а также и в надводном положении.
Источники информации
1. К.А.Виноградов и др. "Абсолютные и относительные лаги", Справочник, Л., Судостроение, 1990 г., стр.198-203, 209-210.
2. В.И.Каманин и др. "Справочник штурмана", Воен. издат. МО СССР, М., 1968, стр.58-66.
3. К.А.Виноградов и др. "Гидроакустическая траверзная мерная линия" в сборнике докладов Четвертой Российской научно-технической конференции "Современное состояние, проблемы навигации и океанографии" ("НО-2001"), том 2, 6-9 июня 2001 г. ГНИНГИ МО РФ, Санкт-Петербург, 2001 г., стр.18-20.
4. А.П.Простаков "Электронный ключ к океану", Судостроение, Л., 1978, стр.82-87.
5. А.П.Белобров "Гидрография моря", Транспорт, М., 1964, стр.224.
6. "Терминологический словарь-справочник по гидроакустике", Л., Судостроение, 1989, стр.72.
7. Николаенко Ю.А. "Точность определения местонахождения судов гидроакустическими навигационными системами с маяками-ответчиками" в журнале "Судостроение" №2-3, 1996 г., стр.32-34.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| СПОСОБ ПОДЛЕДНОГО ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ ПРИ НАХОЖДЕНИИ ПОДВОДНОГО ОБЪЕКТА НА ГОРИЗОНТЕ ПЛАВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ С ИСПОЛЬЗОВАНИЕМ ГИДРОАКУСТИЧЕСКОГО КАНАЛА ПЕРЕДАЧИ НАВИГАЦИОННОЙ ИНФОРМАЦИИ | 2008 |
|
RU2398316C2 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2444759C1 |
| Способ калибровки лага, установленного на подводном аппарате | 2023 |
|
RU2800186C1 |
| УТОЧНЕННОЕ ПОЗИЦИОНИРОВАНИЕ В ПОДВОДНОМ НАВИГАЦИОННОМ ПРОСТРАНСТВЕ, ОБРАЗОВАННОМ ПРОИЗВОЛЬНО РАССТАВЛЕННЫМИ ГИДРОАКУСТИЧЕСКИМИ МАЯКАМИ-ОТВЕТЧИКАМИ | 2011 |
|
RU2488842C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
| СПОСОБ ПРОКЛАДКИ МОРСКИХ ПОДВОДНЫХ КАБЕЛЕЙ | 2010 |
|
RU2444827C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАЧАЛЬНЫХ КООРДИНАТ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2016 |
|
RU2629916C1 |
Изобретение относится к области гидроакустики и может быть использовано при калибровке абсолютных и относительных лагов. В способе, включающем излучение и прием через равные промежутки времени акустических сигналов и измерение времени распространения сигналов от судна до каждого из гидроакустических донных маяков-ответчиков (ДМО), дополнительно измеряют скорость распространения сигнала на стандартных горизонтах от поверхности воды до дна, измеряют глубину погружения приемо-передающей антенны судна, глубины установки ДМО, определяют расстояния в горизонтальной плоскости от судовой приемоизлучающей антенны до каждого ДМО (d1, d2) и вычисляют продольную, поперечную и полную истинные скорости судна. Техническим результатом является обеспечение возможности измерения истинной продольной и поперечной составляющих скорости судна как в подводном, так и в надводном положении, а также повышение точности измерения скорости при изменениях параметров течения. 1 ил.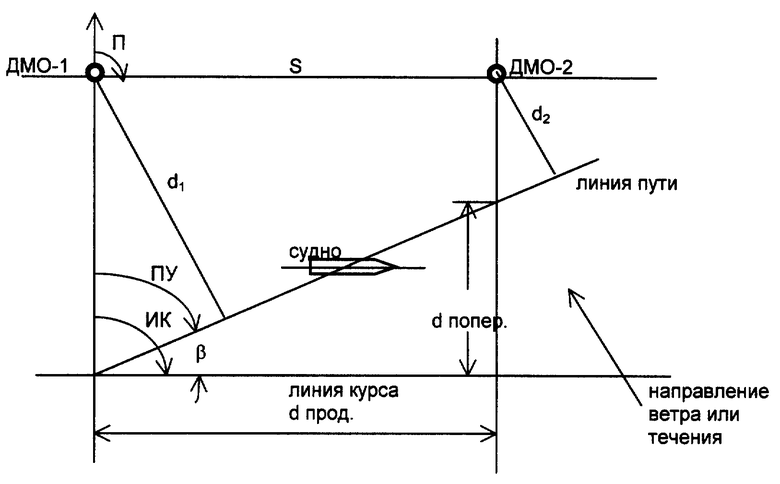
Способ определения истинной скорости судна при калибровке лагов на гидроакустической траверзной мерной линии, включающий движение судна с постоянной скоростью, постоянным курсом, параллельным направлению базы, состоящей из первого и второго гидроакустических донных маяков-ответчиков (ДМО), расстояние S между которыми и направление базы известны, излучение и прием через равные промежутки времени акустических сигналов, измерение времени распространения сигналов (ВРС) Δτ1 и Δτ2 от судна до каждого из ДМО и обратно, регистрацию корабельного времени и моменты приема сигналов ответа, определение интервала времени Т между моментами прохождения судном траверзов первого и второго ДМО, которым соответствуют минимальные значения ВРС, отличающийся тем, что дополнительно измеряют скорость распространения сигнала на стандартных горизонтах от поверхности воды до дна, измеряют глубину погружения h приемопередающей антенны судна, глубины установки ДМО H1 и Н2, определяют расстояния в горизонтальной плоскости от судовой приемо-излучающей антенны до каждого ДМО (d1, d2), а также продольную, поперечную и полную истинные скорости судна по формулам


где Hi - глубина установки ДМО;
Ci и Ci+1 - скорости звука на соседних (i и i+1) стандартных горизонтах;
ΔНi - расстояние между соседними (i и i+1) стандартными горизонтами.
| ВИНОГРАДОВ К.А | |||
| и др | |||
| Гидроакустическая траверзная мерная линия | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| ВИНОГРАДОВ К.А | |||
| и др | |||
| Абсолютные и относительные лаги, Справочник | |||
| Л.: Судостроение, | |||

