Настоящее изобретение относится к области гидроакустики и может быть использовано для классификации подводного объекта гидролокатором ближнего действия, установленным на движущемся подводном носителе.
Известна работа [Тимошенков В.Г. Оценка эффективности кдлассификации подводных неподвижных объектов //Гидроакустика Учредители: Акционерное общество «Концерн «Океанприбор». - №. 47. - С. 5-8.], где показана возможность классификации объектов на классы: объект, находящийся «на дне» и объект, находящийся «над дном». Классификация подтверждена моделированием с использованием способа измерения глубины, изложенного в [Пат. №2350983 Российская Федерация, МПК G01S 15/00. Способ определения глубины погружения объекта / В.Г. Тимошенков, А.А. Войтов; заявитель и патентообладатель ОАО «Концерн «Океанприбор». - №2007105779/28; заявл. 15.02.2007; опубликовано 27.03.2009, Бюл. №9]. Материал, представленные в статье Тимошенкова В.Г., являются наиболее близким аналогом к предлагаемому способу
Способ-прототип содержит излучение зондирующего сигнала, прием эхосигнала и измерение дистанции D1 на момент времени t1, при этом повторяют процедуру измерения дистанции до объекта D2 в момент времени t1+Δt, определяют скорость движения носителя Vсоб и глубину погружения объекта относительно горизонта движения носителя определяют по формуле:
 , где
, где
 , где
, где
D1 - дистанция до объекта в момент времени t1, D2 - дистанция до объекта на момент времени t2+Δt,
Ноб. - глубина погружения объекта
Vсоб. - скорость перемещения излучателя гидролокатора.
В приведенной статье измеренная оценка глубины сравнивается с порогами 30 м и 50 м, которые выбраны произвольно. Классификация проводилась на классы: объект «на дне», при получении оценки Н меньше 50 м и Н меньше 30 м. В противном случае выносилось решение объект над дном.
К недостаткам этого способа относится то, что вероятность классификации существенно зависит от выбранных порогов, которые выбраны произвольно, а не обусловлены реальным эталоном.
Как правило, дистанции D до объекта определяется гидролокатором независимо от пространственного положения обнаруженных объектов, класс которых не известен. Поэтому задача измерения глубины обнаруженного объекта стоит перед каждым гидролокатором освещения подводной обстановки. Все измерения производятся в условиях, когда положение объекта не определено. Поскольку наклонная дальность определяла положение объекта на наклонной дистанции, то она не давала ответа на вопрос, где он находится «на дне» или «над дном». Если «над дном», то на каком расстоянии от дна объект расположен. Весь вопрос заключался в том, что не было эталона, который позволил бы определить пространственное положение полученной оценки дистанции. Предлагаемое техническое решение позволяет устранить эту неопределенность.
Задачей изобретения является повышение вероятности правильной классификации по измеренным параметрам.
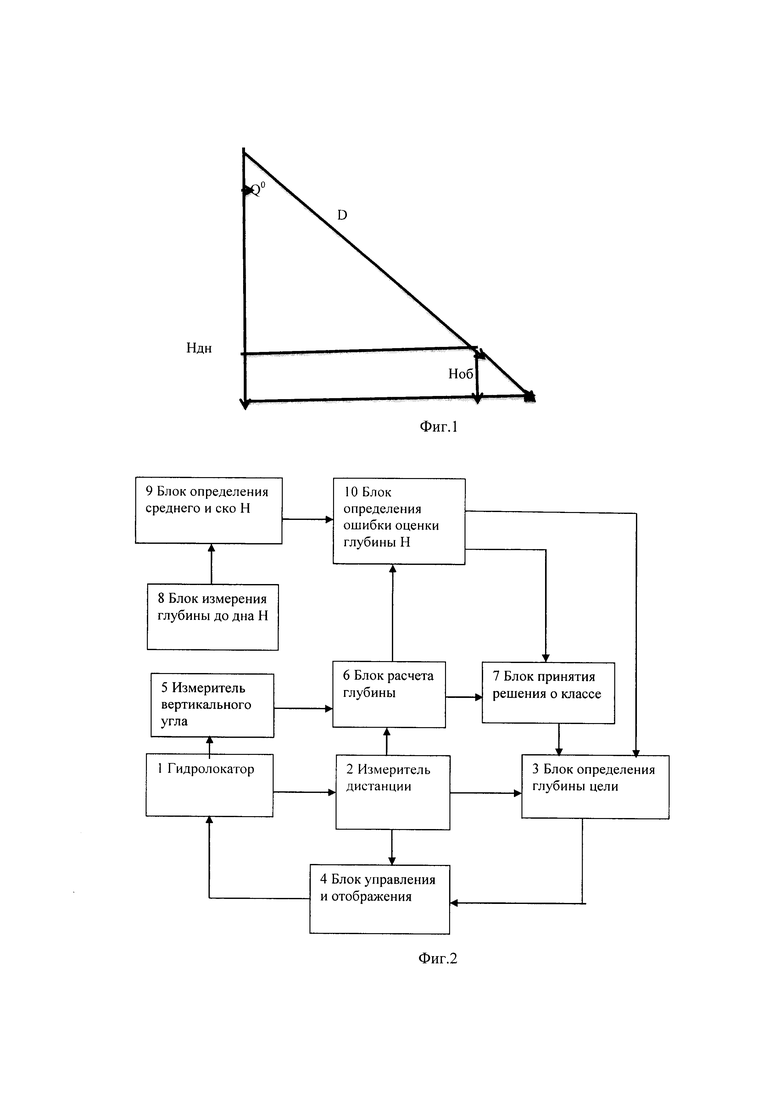
Для решения поставленной задачи в способ, содержащий излучение гидролокатором зондирующего сигнала, прием эхосигнала от объекта, измерение временной задержки между моментом излучения и приема эхосигнала определение дистанции D до объекта по величине задержки и известной скорости распространения звука, определение глубины погружения подводного объекта введены новые признаки, а именно измеряют угол Q0 направления на подводный объект в вертикальной плоскости, измеряют эхолотом дистанцию от гидролокатора до дна Ндн, во время между излучением зондирующего сигнала и приемом эхосигнала запоминают оценки Ндн, если Hдн>D, то принимают решение, что объект «над дном», если Ндн<D, то определяют среднее значение Нднср по нескольким последовательным измерениям Ндн, определяют расчетную оценку глубины Нднр по формуле Hднр=D COS Q0, принимают решение, что обнаруженный подводный объект «на дне» при Нднр<Нднср, а при Нднр≥Нднср подводный объект «над дном», при этом расстояние объекта от дна Роб определяется по формуле Роб=Ндн - D COS Q0.
Техническим результатом, от использования предлагаемого технического решения, является повышение достоверности классификации, поскольку классификацию можно проводить с использованием эталона, которым является глубина Ндн, определяемая эхолотом с малой погрешностью.
Поясним достижения получаемого результата.
Давно известны и разработаны гидролокаторы, которые позволяют определить глубину гидролокатора. Это так называемые эхолоты, которыми оснащены все надводные и подводные средства.
Во всех гидролокаторах освещения ближней обстановки измерение дистанции по вертикальному и горизонтальному каналу определяет наклонную дальность до обнаруженного объекта. Единственным достоверным измерением является глубина гидролокатора Ндн, которое измеряется автоматически с использованием эхолота. Это известное устройство, которое выпускается серийно и устанавливается на все корабли. Глубина Ндн, измеренная эхолотом, характеристика направленности которого расположена непосредственно в направления дна, обеспечивает погрешность измерения порядка 5-10 см на малых глубинах и до 1 м при больших глубинах [Евтютов А.П. и др. Справочник по гидроакустике //Л.: Судостроение. - 1988. - с. 38.]. Эхолот работает непрерывно перпендикулярно направлению движения с большой частотой излучения зондирующего сигнала в направлении дна, поэтому измеренные значения глубины Ндн соответствует каждому моменту изменения глубины. Время между излучаемыми сигналами эхолота существенно меньше, чем время между излучаемыми сигналами гидролокатора освещения ближней обстановки, поскольку это время излучения определяется выбранной шкалой работы по дальности. Известно, что район дна может иметь некоторую изменчивость, поэтому полученная оценка Ндн соответствует неровностям дна, наклонам дна, что необходимо учитывать для принятия решения. Для этой цели используются несколько последовательных оценок глубины гидролокатора, для чего определяется Нднср
Сущность изобретения поясняется фиг. 1, на которой представлена схема, которая объясняет процедуру решения задачи, и фиг. 2, на которой приведена блок-схема устройства, реализующего рассматриваемый способ.
Достоверное измерение расстояния от гидролокатора до дна Ндн, измеренное эхолотом (фиг. 1), что соответствует катету прямоугольного треугольника, и угол Q0, который получен при измерении дистанции D гидролокатором. Однако, точно не известно D является гипотенузой этого прямоугольного треугольника, которая должна доходить до дна или только частью гипотенузы. На этом этапе принимается однозначное решение. Если D1≤H, то объект находится «над дном». Для дальнейшего принятия решения необходимо определить расчетную оценку глубины Нрас по измеренной дистанции и углу Q0 и сравнить ее с эталоном, погрешность которого существенно меньше погрешности определения курсового угла Q0 и неизвестного положения оценки D. Таким образом, имеется достаточно точная оценка Ндн, как среднее значение нескольких последних измерений и расчетная оценка глубины Нднр по измеренной дистанции D и измеренному углу Q0. По этим данным, можно определить ошибку ΔН=Нрас-Ндн. Если расчетная оценка меньше Ндн, то объект находится «над дном». Если расчетная оценка равна или больше Ндн, то объект находится «на дне».
Блок схема устройства, реализующего рассматриваемый способ, представлена на фиг. 2.
Гидролокатор 1 через измеритель 2 дистанции, через первый вход блока 3 определения глубины цели соединен с первым входом блока 4 управления и отображения, выход которого соединен со входом гидролокатора 1. Второй выход гидролокатора 1 соединен через блок 5 измерителя вертикального угла, через первый вход блока 6 расчета глубины, через блок 7 принятия решения о классе со вторым входом блока 3 определения глубины цели. Блок 8 эхолот, через блок 9 определения среднего и ско Н соединен с блоком 10 определения ошибки оценки глубины Н, второй вход которого соединен со вторым выходом блока 6 расчета глубины. Первый выход блока 10 соединен со вторым входом блока 7 принятия решения о классе, а второй выход блока 10 соединен со третьим входом блока 3 определения глубины цели.
Предлагаемая схема работает следующим образом.
Из блока 4 управления и отображения поступает сигнал на гидролокатор 1, который формирует зондирующий сигнал и излучает его. По принятому отраженному эхосигналу определяется дистанция до обнаруженного объекта в блоке 2 и вертикальный угол в блоке 5, по которому пришел сигнал с максимальной амплитудой. Гидролокатор и измеритель 5 угла прихода эхосигнала являются известными устройствами, которые используются в приведенных аналогах. Измеренное значение угла поступает в блок 6 расчета глубины, на второй вход которого поступает оценка измеренной дистанции. В блоке 6 производится расчет глубины Нрас до дна по измеренной дистанции D1 и по измеренному углу Q0. Полученная оценка глубины Нрас поступает в блок 10 определение ошибки оценки глубины, куда поступает среднее значение Нср и ско Нср, измеренные по данным эхолота блока 8. Полученные измерения ошибки поступают в блок: принятия решения о классе 7.
Эхолот является известным устройством, который установлен на всех кораблях и подводных лодках [Хребтов А.А., Виноградов К.А., Осюхин Б.А. Судовые эхолоты //Л.: Судостроение. - 1982. - Т. 232.]. Промерные эхолоты обеспечивают измерение глубины с высокой точностью порядка 5-10 см [Евтютов А.П. и др. Справочник по гидроакустике //Л.: Судостроение. - 1988.]. За время излучения зондирующих сигналов гидролокатором эхолот успевает сделать несколько излучений для измерения глубины до дна. Как правило, горизонтальная дистанция шкалы работы гидролокатора, которая определяет последовательность излучения, больше чем вертикальное расстояние до дна. Измеренные оценки последовательных дистанций до дна поступают в блок 9 определения среднего Нср. Эта процедуры являются известными операциями, выполняемыми во всех гидролокаторах. Полученные оценки передаются в блок 10 определения ошибки оценки глубины и далее в блок 7 принятия решения, выход которого соединен с блоком 3, где определяется глубина цели.
Таким образом, предлагаемая процедура принятия решения позволяет по нескольким циклам излучение-прием принимать решение о классе обнаруженного объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ ХАРАКТЕРИСТИК ОБЪЕКТА | 2014 |
|
RU2570100C1 |
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ ХАРАКТЕРИСТИК ОБЪЕКТА НА ДНЕ | 2014 |
|
RU2582623C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ЗВУКА | 2016 |
|
RU2631234C1 |
| Способ определения вертикального угла положения подводного объекта | 2023 |
|
RU2810693C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЛУБИНЫ ОБЪЕКТА И ГИДРОЛОКАТОРОМ | 2013 |
|
RU2527136C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБКИ ОЦЕНКИ ДИСТАНЦИИ ГИДРОЛОКАТОРОМ | 2012 |
|
RU2516594C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ ОБЪЕКТА | 2016 |
|
RU2625041C1 |
| Способ обсервации подводного аппарата | 2021 |
|
RU2763114C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГИДРОЛОКАТОРОМ ПАРАМЕТРОВ ВЫТЕКАЮЩЕГО ГАЗА ИЗ ТРУБЫ ПОДВОДНОГО ГАЗОПРОВОДА | 2016 |
|
RU2631228C1 |
| Гидролокационный способ классификации объектов | 2022 |
|
RU2791152C1 |
Изобретение относится к области гидроакустики и предназначено для проведения классификации обнаруженных объектов гидролокаторами освещения обстановки. Техническим результатом является повышение вероятности правильной классификации по измеренным параметрам. Заявленный способ содержит излучение гидролокатором зондирующего сигнала, прием эхосигнала от объекта, измерение временной задержки между моментом излучения и приема эхосигнала, определение дистанции D до объекта по величине задержки и известной скорости распространения звука и определение глубины погружения подводного объекта. Далее проводят измерение угла Q° направления на подводный объект в вертикальной плоскости и измерение эхолотом дистанции от гидролокатора до дна Ндн, оценки которых запоминают во время между излучением зондирующего сигнала и приемом эхосигнала. Если Hдн>D, то принимают решение, что объект «над дном». Если Hдн<D, то определяют среднее значение Нднср по нескольким последовательным измерениям Ндн, определяют расчетную оценку глубины Нднр, принимают решение, что обнаруженный подводный объект «на дне» при Нднр<Нднср, а при Нднр≥Нднср подводный объект «над дном», и определяют расстояние объекта от дна. 2 ил.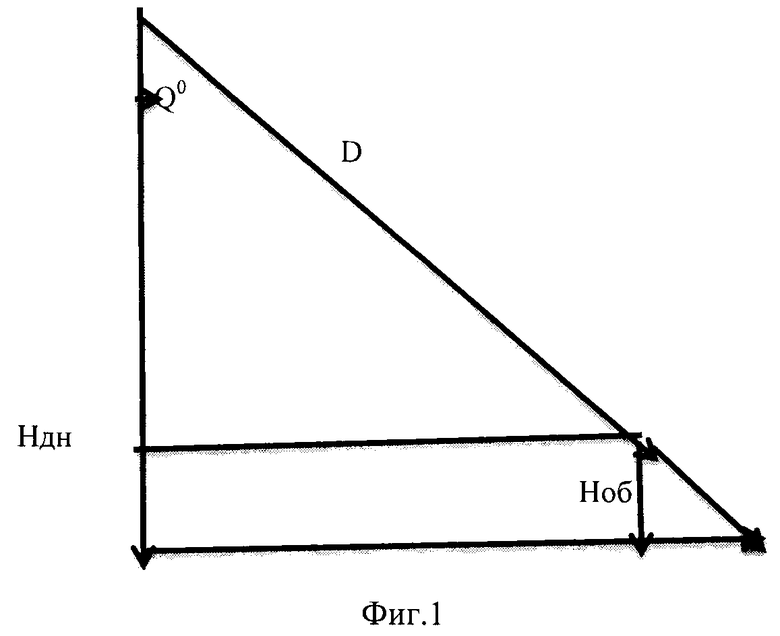
Способ классификации подводного объекта гидролокатором ближнего действия, установленным на движущемся подводном носителе, содержащий излучение гидролокатором зондирующего сигнала, прием эхосигнала от объекта, измерение временной задержки между моментом излучения и приема эхосигнала, определение дистанции D до объекта по величине задержки и известной скорости распространения звука, определение глубины погружения подводного объекта, отличающийся тем, что измеряют угол Q° направления на подводный объект в вертикальной плоскости, измеряют эхолотом дистанцию от гидролокатора до дна Ндн, во время между излучением зондирующего сигнала и приемом эхосигнала запоминают оценки Ндн, если Ндн>D, то принимают решение, что объект «над дном», если Ндн<D, то определяют среднее значение Нднср по нескольким последовательным измерениям Ндн, определяют расчетную оценку глубины Нднр по формуле Нднр=D COS Q°, принимают решение, что обнаруженный подводный объект «на дне» при Нднр<Нднср, а при Нднр≥Нднср подводный объект «над дном», при этом расстояние объекта от дна Роб определяется по формуле Роб=Ндн-D COS Q°.
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ ОБЪЕКТА | 2007 |
|
RU2350983C2 |
| Способ обсервации подводного аппарата | 2021 |
|
RU2763114C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ ПРИВОДНЯЮЩЕГОСЯ ОБЪЕКТА | 2011 |
|
RU2478983C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОДВОДНОГО ТРУБОПРОВОДА | 2011 |
|
RU2472178C1 |
| CN 111694003 A, 22.09.2020 | |||
| CN 104793212 A, 22.07.2015 | |||
| Способ получения водорастворимого полиэлектролита | 1973 |
|
SU448192A1 |

