Изобретение относится к области двигателестроения, в частности двигателей внутреннего сгорания и компрессоров.
По своей технической сущности наиболее близкими к заявляемому являются устройства (прототип) [1, 2], в настоящее время известные как роторный двигатель Ванкеля. В корпусе прототипа расположены инициирующее устройство и газораспределительные отверстия, а во внутренней цилиндрической полости совершает сложное вращение рабочий ротор, представляющий собой объемную фигуру с осью симметрии порядка М, где М - число ребер рабочего ротора, скользящих по цилиндрической поверхности корпуса (для прототипа М=3). Внутри ротора расположена коаксиально шестерня, находящаяся во внутреннем зубчатом зацеплении с ведущим валом и передающая вращение ротора ведущему валу. При этом центры масс ротора и внутренней шестерни, через которые проходят их оси симметрии, движутся по замкнутой кривой, что вызывает вибрацию и, как следствие, сравнительно быстрый износ деталей.
Другим близким к заявляемому устройству техническим решением (аналогом) является известный четырехтактный роторный двигатель [3], в котором овальный ротор, находящийся во внутреннем зубчатом зацеплении с ведущим валом, совершает еще более сложное вращение. И этому двигателю присущ тот же недостаток - движение центра масс ротора, причем кривая движения центра масс имеет точки излома. Последнее только усугубляет ситуацию.
В заявляемом устройстве предлагается простая техническая идея, заключающаяся в том, что оси симметрии всех подвижных деталей являются их неподвижными осями вращения, следствием чего является полное отсутствие вибрации. От прототипа и аналога заявляемое устройство - многороторный двигатель внутреннего сгорания (МРДВС) - отличается тем, что цилиндрическая поверхность корпуса представляет собой круглый цилиндр. Рабочий ротор жестко закреплен на ведущем валу, причем ось симметрии рабочего ротора, ось круглоцилиндрической поверхности корпуса и ось ведущего вала совпадают. В корпусе расположены вспомогательные полости в виде круглых цилиндров, пересекающихся с цилиндрической поверхностью корпуса, причем оси вспомогательных полостей и круглоцилиндрической поверхности корпуса параллельны. В каждой вспомогательной полости вращается вспомогательный ротор, ось симметрии которого является его осью вращения и совпадает с осью вспомогательной полости. Вспомогательный ротор представляет собой объемную фигуру с осью симметрии порядка m, где m - число ребер вспомогательного ротора, скользящих по круглоцилиндрической поверхности вспомогательной полости. Цилиндрические поверхности рабочего и вспомогательных роторов являются поверхностями скольжения, ограниченными ребрами. При вращении рабочего и каждого вспомогательного роторов осуществляется непрерывное поочередное скольжение ребра одного из них по поверхности скольжения другого. Последнее именуется далее принципом взаимного скольжения. Что касается инициирующего устройства, то как в прототипе, так и в заявляемом устройстве под этим названием фигурируют либо электрическая свеча, либо форсунка для впрыска топлива, либо то и другое вместе.
Фиг.1 дает пояснение к кинематике заявляемого устройства, реализуемого в двух вариантах: а) внутренний вариант с внутренним рабочим ротором, b) внешний вариант с внешним рабочим ротором. Изображенные сечения служат для расчета основных геометрических параметров и поясняют принцип взаимного скольжения рабочего и вспомогательного роторов. Используемые термины, за исключением оговоренных случаев, соответствуют плоским фигурам.
Внутренний вариант.
В отличие от прототипа, в котором цилиндрическая поверхность корпуса, по которой скользят ребра рабочего ротора, представляет собой так называемую эпитрохоиду, в заявляемом устройстве эта поверхность является круглым цилиндром радиуса R0, ось цилиндра находится в точке О. Сечение рабочего ротора представляет собой правильный «раздутый» М-угольник (М - число ребер), вписанный в окружность радиуса R0. А, В, … - вершины М-угольника, являющиеся точками пересечения прямолинейных ребер рабочего ротора с плоскостью сечения. Подобно прототипу рабочий ротор представляет собой объемную фигуру с осью симметрии порядка М, которая при повороте на угол 2π/М совпадает с исходной. В точке О находится ось симметрии рабочего ротора. В этой же точке находится ось вращения ведущего вала (на фиг.1 не показан), на котором жестко закреплен рабочий ротор. В корпусе расположена вспомогательная полость в виде круглого цилиндра радиуса r0, ось которого находится в точке Oi, причем оси вспомогательной полости и круглоцилиндрической поверхности корпуса параллельны. Вспомогательная полость пересекается с круглоцилиндрической поверхностью корпуса. Λ и Р являются точками пересечения линий (кромок) пересечения цилиндров с плоскостью сечения. В окружность радиуса r0 вписан правильный «раздутый» m-угольник (в данном случае m=3), являющийся сечением вспомогательного ротора, а, b, с - вершины m-угольника, являющиеся точками пересечения прямолинейных ребер вспомогательного ротора с плоскостью сечения. Вспомогательный ротор представляет собой объемную фигуру с осью симметрии порядка m, которая при повороте на угол 2π/m совпадает с исходной. В точке Оi находится ось симметрии и ось вращения вспомогательного ротора. Показано положение, при котором в точке Р совпадают вершины А рабочего и а вспомогательного роторов. Далее вершина А начинает скольжение по окружности радиуса R0, вершина а начинает скользить по линии, соединяющей вершины А и В, вершина В продолжит скольжение по окружности радиуса R0, вершина с продолжит скольжение по окружности радиуса r0. Через определенное время в точке Λ встретятся вершины В и а. При этом произойдет трансформация криволинейной области АВΛса в криволинейный сегмент ас, аналогичный показанному на фиг.1 криволинейному сегменту bc, который ограничен дугой bc вспомогательного ротора и частью окружности радиуса r0. Описанная стадия, происходящая со стороны точки Λ, может быть использована для такта сжатия газовой смеси после такта впуска или для такта выхлопа отработанной смеси после такта рабочего хода. Площадь криволинейной области АВΛса, умноженная на толщину ротора, определяет объем всасывания, площадь криволинейного сегмента bc, умноженная на толщину ротора, определяет объем сжатия. Их отношение определяет степень сжатия. Последняя зависит от значений М, m, R0, r0. При постоянной степени сжатия (т.е. для выбранных М, m, R0/r0) и неизменной толщине ротора объем всасывания изменяется пропорционально R0 2.
Вершина а после встречи в точке Λ с вершиной В далее начнет скользить по окружности радиуса r0. Вершина В начнет скользить по линии ab, соединяющей вершины а и b вспомогательного ротора, и это скольжение закончится, когда в точке Р совпадут вершины В и b. Далее процесс повторяется.
С момента времени, соответствующего фиг.1, со стороны точки Р происходит трансформация криволинейного сегмента ab в криволинейную область, зеркально симметричную (относительно линии, проходящей через оси О и Oi) показанной на фиг.1 области АВΛса. Эту стадию можно использовать для такта рабочего хода после такта сжатия или для такта впуска после такта выхлопа.
Проведенное рассмотрение показывает, что одной вспомогательной полости с вращающимся в ней вспомогательным ротором недостаточно для обеспечения 4-тактного режима работы заявленного устройства в качестве двигателя.
Рассчитаем основные геометрические параметры. Здесь:
α0 - угол видения линии пересечения окружностей ΛР из оси О,
β0 - угол видения линии пересечения окружностей ΛР из оси Oi,
Ω - скорость вращения рабочего ротора,
ω - скорость вращения вспомогательного ротора.
За время t1 вершина А рабочего ротора переместилась из точки Λ в точку Р, повернувшись на угол α0, вершина с вспомогательного ротора повернулась на угол  При этом схема оказалась в положении, показанном на фиг.1. После этого за время t2 вершина В рабочего ротора переместится в точку Λ, т.е. повернется на угол
При этом схема оказалась в положении, показанном на фиг.1. После этого за время t2 вершина В рабочего ротора переместится в точку Λ, т.е. повернется на угол  вершина a вспомогательного ротора также переместится в точку Λ, т.е. повернется на угол β0.
вершина a вспомогательного ротора также переместится в точку Λ, т.е. повернется на угол β0.
Отсюда - Ωt1=α0, 

Исключая t1 и t2 получаем

Кроме того, имеем 
Основное и очевидное геометрическое соотношение -

Подставляя β0, получаем

Отсюда вычисляем α0, а следовательно, и β0 для выбранных М, m, R0 и r0.
Находим расстояние OOi=Lin между осями рабочего и вспомогательного цилиндров
Для углов α0 и β0 имеем очевидные неравенства:

Существенно, что, исходя из равенства (1), отношение скоростей вращения рабочего и вспомогательного роторов выражается рациональным числом. Это значит, что жесткая связь между ними и постоянная синхронизация их вращений могут быть обеспечены с использованием зубчатых или цепных передач. Применение фрикционных передач исключается.
На фиг.1 линии, соединяющие вершины рабочего ротора, и линии, соединяющие вершины вспомогательного ротора, имеют определенную форму. Эти линии являются направляющими цилиндрических поверхностей скольжения (ЦПС) роторов. Для рабочего ротора они определяются функциональной зависимостью R(α), показывающей расстояние R точки линии, имеющей угловую координату α, от оси ротора. Угол α, отсчитываемый, например, от вершины ротора, изменяется в пределах 2π/М≥α≥0. Функция R(α) является решением трансцендентного уравнения, которое можно назвать уравнением скольжения, описывающего скольжение ребра вспомогательного ротора по поверхности скольжения рабочего ротора. R(α) проходит через три точки, называемые опорными: две из них являются соседними вершинами «раздутого» М-угольника, третья точка лежит на биссектрисе угла между вершинами и расположена на расстоянии Lin-r0 от оси ротора О. Очень близкой к ЦПС является поверхность круглого цилиндра, направляющая которого в виде дуги окружности радиуса RC проходит через те же опорные точки. Функция RC(α) по аналогии с R(α) описывает дугу окружности. Степень близости между ними оценивается параметром Δ(α)=R(α)-RC(α). В опорных точках Δ=0. Δmax показывает максимальную разность, а также ее знак, т.е. что больше - R(α) или RC(α).
Для вспомогательного ротора аналогично вводятся в рассмотрение: функции r(β), rC(β), где 2π/m≥β≥0, δ(β)=r(β)-rC(β) и значение δmax. Третья опорная точка находится на расстоянии Lin-R0 от оси вспомогательного ротора Oi.
Величины Δmax и δmax зависят от выбранных М, m, R0, r0.
Внешний вариант.
Описание внешнего варианта аналогично описанию внутреннего варианта, в том числе справедливы выражения (1), (2), (3), (4). Также аналогично вводятся в рассмотрение величины Δmax и δmax.
Отличия заключаются в следующем.
1. Расстояние между осями 
2. Третья опорная точка для рабочего ротора находится на расстоянии Lout+r0 от его оси О, третья опорная точка для вспомогательного ротора находится на расстоянии R0-Lout от его оси Oi.
Цилиндрические поверхности скольжения роторов вместе с ребрами образуют то, что можно назвать цилиндрической структурой скольжения (в роторных двигателях есть еще и торцевые плоскости скольжения роторов). Используя этот термин, можно сформулировать, что в заявленном устройстве принцип взаимного скольжения выполняется при встречном движении цилиндрических структур скольжения рабочего и вспомогательного роторов. Исходя из этого, во внутреннем варианте все роторы вращаются в одну сторону, во внешнем варианте направление вращения вспомогательных роторов противоположно направлению вращения рабочего ротора.
Проведенное рассмотрение показывает, что цилиндрическая поверхность роторов представляет собой «раздутую» боковую поверхность призмы. При «раздувании» ребра призмы остаются на цилиндрах радиуса R0 для рабочего ротора и радиуса r0 для вспомогательного ротора, а боковые плоские грани призмы принимают форму, близкую к круглоцилиндрической. Для рабочего ротора во внутреннем варианте эти круглоцилиндрические поверхности остаются внутри цилиндра радиуса R0 (т.е. RC>R0), во внешнем варианте круглоцилиндрические поверхности выходят за пределы цилиндра радиуса R0 (т.е. RC<R0, особый случай при М=2, когда RC>R0). Для вспомогательных роторов обоих вариантов rC>r0.
Фиг.2 и 3 показывают на простейшем примере (М=2, две вспомогательные полости, m=2, при одинаковых R0 и r0), как реализуется свойство герметичности полостей, образующихся при вращении роторов, при использовании в конструкции подвижных деталей, каждая из которых вращается вокруг своей неподвижной оси симметрии, и как обеспечивается четырехтактный режим работы двигателя для выбранного примера.
В полости 1 продолжается рабочий ход, начавшийся после того, как точку Р миновали вершины А рабочего и а верхнего вспомогательного роторов, причем в этот момент или чуть позже срабатывает инициирующее устройство, расположенное в верхней вспомогательной полости, названной активной камерой. Нижняя вспомогательная полость названа газораспределительной камерой. В полости 2 продолжается выхлоп отработанных газов от предшествующего рабочего хода. Когда в точке ψ совпадут вершины А рабочего и d нижнего роторов, закончится текущий рабочий ход и прекратится выхлоп отработанных газов от предшествующего рабочего хода. В полости 3 продолжается процесс всасывания свежей газовой смеси через впускное отверстие, начавшийся после того, как точку Г миновали вершины В рабочего и d нижнего роторов. Процесс всасывания закончится, когда в точке Р совпадут вершины В рабочего и b верхнего роторов, а в точке Г совпадут вершины А рабочего и с нижнего роторов. В полости 4 продолжается процесс сжатия газовой смеси, который закончится в момент прихода в точку Λ вершин В рабочего и а верхнего роторов.
Рабочий ротор как в прототипе, так и в заявляемом устройстве получил свое название в связи с тем, что именно он совершает работу по передаче энергии воспламененной газовой смеси ведущему валу. Давление газов создает угловой момент, приложенный к рабочему ротору. Вспомогательный ротор служит для создания (конечно, вместе с рабочим ротором) необходимых замкнутых полостей внутри двигателя, а угловой момент сил давления газов на него в первом приближении равен нулю вплоть до момента начала вытеснения отработавшей смеси (фиг.2 и 3), т.е. до окончания рабочего хода. Если требуется двигатель с несколькими ведущими валами, можно использовать и валы вспомогательных роторов, вращательные усилия на которые передаются от ведущего вала через основные зубчатые или цепные передачи.
В заявляемом устройстве минимальное число вспомогательных полостей равно двум (одна - активная, другая - газораспределительная). В принципе число вспомогательных полостей может быть любым (насколько позволяет геометрия). Однако с точки зрения получения максимальной мощности заявляемого устройства и достижения максимальной простоты целесообразно установить N=М, где N - число вспомогательных цилиндров. При этом очевидно, что N должно быть четным числом, т.е. половина вспомогательных цилиндров должна быть газораспределительными, половина - активными, и они должны чередоваться между собой. Тем самым М целесообразно выбрать четным числом. При N=М центральный угол между осями двух соседних вспомогательных цилиндров равен  при N<М этот угол целесообразно установить равным
при N<М этот угол целесообразно установить равным  где к≥1, целое.
где к≥1, целое.
Фиг.2, 3 показывают, что при выбранных М=N=2 за один оборот рабочего ротора происходит два рабочих хода. В общем случае число рабочих ходов за один оборот рабочего ротора равно 
Показанные на фиг.2, 3 сечения корпусов заявляемого устройства изображены в произвольной форме. Очевидно, что в корпусе обоих вариантов должны быть полости для охлаждения. Должны также охлаждаться и роторы. Наибольшее выделение тепла происходит вблизи камер, где осуществляется рабочий ход. При N≥4 выделение тепла происходит в двух или более полостях, что способствует меньшим градиентам температуры в корпусе. Рабочий ротор можно максимально облегчить, удалив лишний металл (материал) без ухудшения прочностных характеристик и потери герметичности, причем даже в облегченном виде он будет обладать свойствами маховика. Отверстия для впуска свежей смеси и выпуска отработанных газов могут иметь щелевидную форму, вытянутую вдоль образующей газораспределительных камер. При увеличении толщины ротора (т.е. при его удлинении) число инициирующих устройств следует увеличивать. Отверстия для впуска и выхлопа могут располагаться вне вспомогательных полостей, но вблизи кромок пересечения цилиндров радиусов R0 и r0.
Приведем пример рассчитанных геометрических параметров заявляемого устройства, представляющий интерес, например, для авиа- и автомобилестроения. Выбираем диаметр круглоцилиндрической поверхности корпуса 40 см (R0=20 см), диаметр вспомогательных цилиндров 5 см (r0=2,5 см), толщина ротора - 10 см, М=4, N=4, m=3. Тогда для внутреннего варианта объем всасывания составит ~223 см3, степень сжатия ~6,7, для внешнего - 187 см3 и 6,8 соответственно. Число рабочих ходов за один оборот рабочего ротора будет равно  . Следовательно, рассчитанный внутренний вариант заявляемого устройства при одинаковых скоростях вращения равносилен по мощности 16-цилиндровому четырехтактному поршневому двигателю внутреннего сгорания со степенью сжатия ~6,7, с объемом одного цилиндра ~223 см3 и полным объемом 3,57 литра (для внешнего варианта соответственно 6,8, 187 см3 и 2,99 литра). В данном примере передача вращения от рабочего ротора к вспомогательным может осуществляться следующим образом: на валах всех роторов жестко закреплены шестерни, число зубьев рабочей шестерни - ZW, вспомогательных шестерен - ZS.
. Следовательно, рассчитанный внутренний вариант заявляемого устройства при одинаковых скоростях вращения равносилен по мощности 16-цилиндровому четырехтактному поршневому двигателю внутреннего сгорания со степенью сжатия ~6,7, с объемом одного цилиндра ~223 см3 и полным объемом 3,57 литра (для внешнего варианта соответственно 6,8, 187 см3 и 2,99 литра). В данном примере передача вращения от рабочего ротора к вспомогательным может осуществляться следующим образом: на валах всех роторов жестко закреплены шестерни, число зубьев рабочей шестерни - ZW, вспомогательных шестерен - ZS.
Находим
Во внутреннем варианте либо используем цепь, либо устанавливаем две промежуточные шестерни. Одна из них находится в зацеплении с рабочей и двумя любыми соседними вспомогательными шестернями, другая связывает рабочую и две другие вспомогательные шестерни. Во внешнем варианте можно непосредственно зацепить рабочую шестерню с четырьмя вспомогательными.
В рассчитанном внутреннем варианте Δmax≈65 микрон, δmax≈-0,03 микрона, во внешнем - Δmax≈90 микрон, δmax≈-4 микрона. Минимальные зазоры достигаются при обработке точной формы ЦПС.
Сравнивая между собой внутренний и внешний варианты, следует отметить следующее.
1. При одинаковых выбираемых параметрах R0, r0, М, m и одинаковой толщине ротора обеспечиваются практически одинаковые степени сжатия, а объем всасывания несколько больше для внутреннего варианта.
2. Во внешнем варианте больше коэффициент использования площади поперечного сечения устройства, однако в нем несколько затруднен доступ к инициирующему устройству и к отверстиям для впуска и выхлопа.
3. Во внешнем варианте можно непосредственно зацеплять шестерни, закрепленные на рабочем и вспомогательных валах, т.е. можно обойтись без цепей и промежуточных шестерен, необходимых для внутреннего варианта.
4. Показанные на фиг.2 и 3 эскизы вариантов начерчены в соответствии с расчетом цилиндрической формы роторов. Они свидетельствуют, что при m=2 вспомогательный ротор для внутреннего варианта имеет сравнительно малую толщину (поперечную относительно оси вращения). При этом возможен прогиб ротора под действием давления воспламененной газовой смеси. Поэтому для внутреннего варианта рекомендуется m≥3. Во внешнем варианте толщина вспомогательного ротора больше и можно выбрать m=2.
5. Во внутреннем варианте иное расположение отверстий для впуска и выхлопа (фиг.4) обеспечивает лучшие газодинамические условия движения газопотоков, поскольку углы их поворотов наименьшие. Во внешнем варианте иное расположение газораспределительных отверстий мало что меняет.
Для использования заявляемого устройства в качестве компрессора активные камеры либо удаляются, либо заменяются газораспределительными. В принципе достаточно одной газораспределительной камеры.
Благодаря тому, что все подвижные детали - роторы, шестерни (цепь можно не учитывать) - испытывают вращение вокруг их неподвижных осей симметрии, конструкция заявляемого устройства является изначально абсолютно сбалансированной.
Определенную трудность в реализации заявляемого устройства может представить герметизация полостей, возникающих в процессе его работы. Герметизация осуществляется за счет скольжения ребер одних роторов по поверхностям скольжения других или по круглоцилиндрическим поверхностям корпуса и вспомогательных полостей. Однако если эта проблема решена для прототипа, то, скорее всего, она может быть решена и для заявляемого устройства. Как и в двигателе Ванкеля ребра роторов могут быть изготовлены сменяемыми и из нужного металла. Кроме того, благодаря неподвижности осей вращения роторов предоставляется возможность реализации следующего способа герметизации: при высокой точности изготовления деталей и обеспечении необходимого теплового режима зазоры между скользящими деталями можно сделать одинаковыми и очень малыми, а герметизация будет осуществляться за счет сил поверхностного натяжения смазки, обладающей, как известно, сильно выраженными смачивающими свойствами. Герметизации с помощью смазки будет способствовать и то, что при вращении ребро ротора гонит перед собой волну сжатой смазки. При таком способе герметизации будут обеспечены наименьшая сила трения и наименьший износ деталей.
ЛИТЕРАТУРА
1. Hoppner Е., Wankel F. BDP (Патент ФРГ) 1088287, kl. 46 a5 9, internat. kl. F02B. Дата подачи заявки 4 октября 1954 г.
2. Froede W. BDP (Патент ФРГ) 1144052, kl. 46 а5 9, internat. kl. F02B. Дата подачи заявки 9 июня 1959 г.
3. B.Schapiro, L.Levitin, N.Krak. ЕР 1417396, internat. kl. F01C 1/10, F01C 17/00. Дата публикации 12 мая 2004 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОРОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2005 |
|
RU2305785C2 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ АНАЛОГОВОГО СИГНАЛА | 1995 |
|
RU2099866C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ АНАЛОГОВОГО СИГНАЛА | 1996 |
|
RU2118045C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ АНАЛОГОВОГО СИГНАЛА | 1996 |
|
RU2119718C1 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С ЖИДКОСТНЫМ ЗАПОРНЫМ КОЛЬЦОМ | 1997 |
|
RU2135796C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2022 |
|
RU2786863C1 |
| Биротативный механизм | 2023 |
|
RU2815409C1 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1995 |
|
RU2083850C1 |
| Роторная объёмная машина | 2021 |
|
RU2767416C1 |
| БИРОТАТИВНЫЙ ДВИГАТЕЛЬ | 1990 |
|
RU2009341C1 |
Изобретение относится к двигателям внутреннего сгорания и компрессорам. Многороторный двигатель внутреннего сгорания содержит корпус, ведущий вал и рабочий ротор. Рабочий ротор представляет собой объемную фигуру с осью симметрии порядка М, где М - число ребер рабочего ротора, которые скользят по цилиндрической поверхности корпуса. В корпусе расположены инициирующие устройства и отверстия для впуска и выхлопа газов. Рабочий ротор жестко закреплен на ведущем валу. Ось симметрии рабочего ротора, ось круглоцилиндрической поверхности корпуса и ось ведущего вала совпадают. В корпусе расположены вспомогательные полости в виде круглых цилиндров, пересекающихся с цилиндрической поверхностью корпуса. Оси вспомогательных полостей и цилиндрической поверхности корпуса параллельны. В каждой вспомогательной полости расположен вспомогательный ротор. Вспомогательный ротор представляет собой объемную фигуру с осью симметрии порядка m, где m - число ребер вспомогательного ротора, которые скользят по круглоцилиндрической поверхности вспомогательной полости. Ось симметрии вспомогательного ротора является его осью вращения, совпадающей с осью вспомогательной полости. Цилиндрические поверхности рабочего и вспомогательных роторов являются поверхностями скольжения, ограниченными ребрами. При вращении рабочего и каждого вспомогательного роторов осуществляется непрерывное поочередное скольжение ребра одного из них по поверхности скольжения другого. Техническим результатом является создание сбалансированной конструкции и уменьшение силы трения и износа деталей. 4 ил.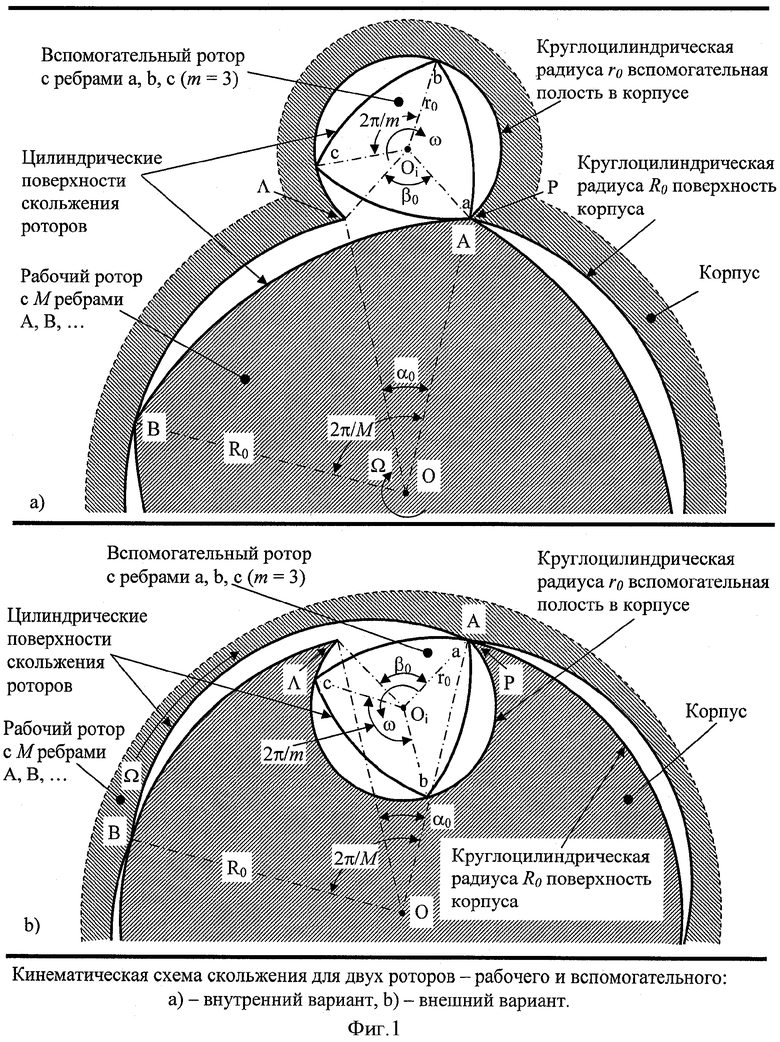
Многороторный двигатель внутреннего сгорания, содержащий корпус, ведущий вал, рабочий ротор, представляющий собой объемную фигуру с осью симметрии порядка М, где М - число ребер рабочего ротора, которые скользят по цилиндрической поверхности корпуса, вращение рабочего ротора передается ведущему валу, в корпусе расположены инициирующие устройства для рабочего хода и отверстия для впуска газовой смеси и выхлопа отработанных газов, отличающийся тем, что цилиндрическая поверхность корпуса представляет собой круглый цилиндр, рабочий ротор жестко закреплен на ведущем валу, причем ось симметрии рабочего ротора, ось круглоцилиндрической поверхности корпуса и ось ведущего вала совпадают, в корпусе расположены вспомогательные полости в виде круглых цилиндров, пересекающихся с цилиндрической поверхностью корпуса, причем оси вспомогательных полостей и цилиндрической поверхности корпуса параллельны, в каждой вспомогательной полости расположен вспомогательный ротор, представляющий собой объемную фигуру с осью симметрии порядка m, где m - число ребер вспомогательного ротора, которые скользят по круглоцилиндрической поверхности вспомогательной полости, ось симметрии вспомогательного ротора является его осью вращения, совпадающей с осью вспомогательной полости, цилиндрические поверхности рабочего и вспомогательных роторов являются поверхностями скольжения, ограниченными ребрами, и при вращении рабочего и каждого вспомогательного роторов осуществляется непрерывное поочередное скольжение ребра одного из них по поверхности скольжения другого.
| Установка для прессования изделий из древесно-клеевой композиции | 1987 |
|
SU1445973A1 |
| РОТОРНАЯ МАШИНА | 1998 |
|
RU2135778C1 |
| US 4152100 А, 01.05.1979 | |||
| Способ дипольного индуктивного профилирования и зондирования | 1985 |
|
SU1377802A1 |
| РОТОРНО-ЛОПАСТНОЕ УСТРОЙСТВО ПЕРЕДАЧИ И ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ | 1995 |
|
RU2109169C1 |
| US 4057035 А, 08.11.1977. | |||

