Изобретение относится к геодезической измерительной технике и может быть использовано для оценки непосредственно в полевых условиях единичных результатов линейных измерений при производстве геодезических работ.
Известен способ определения веса единичного геодезического измерения в системе наблюдатель - прибор - визирный луч - визирная цель, предусматривающий проведение дополнительного измерения по шкале миры, фиксирующей изменение геометрических размеров раздельно визируемых объектов с изменением длины визирного луча при наблюдении в оптимальных условиях при максимальной разрешающей способности вооруженного глаза наблюдателя, и расчет численного значения как отношение Rн/Ro, где Rн - длина визирного луча до визирной цели; Ro - результат дополнительного измерения (описание RU 2234061, МПК7 G01C 15/06, 2003.03.31).
Известный способ может быть использован только при производстве высокоточного нивелирования, что ограничивает область его применения.
Средства, используемые в известном способе, для получения результатов сравнения и выбор критерия в расчетах численного значения веса единичного измерения не позволяют оценить текущее состояние всех компонентов основного линейного измерения, влияющих на равноточность единичных измерений, в том числе физиологическое состояние наблюдателя, техническое состояние геодезического прибора, состояние среды, в которой проходит визирный луч, техническое состояние визирной цели. Это снижает точность оценки доверия к единичным результатам линейных измерений.
Задача изобретения - разработка универсального способа определения веса единичного линейного измерения.
Технический результат от использования способа - расширение области применения и повышение объективности и достоверности результатов.
Технический результат достигается тем, что в способе определения веса единичного линейного измерения в системе наблюдатель - прибор - визирный луч - визирная цель, предусматривающем проведение дополнительных измерений по контрольным маркам миры и расчет численного значения веса, для измерений используют миру с тремя горизонтальными марками в виде отражателей, центральную из которых совмещают с визирной целью и измеряют длины визирных лучей L1, L2, L соответственно до крайних и средней контрольных марок миры, а о весе единичного линейного измерения EL судят по абсолютному значению разности эталонного расстояния bмиры между центрами крайних контрольных марок миры и его практического значения
bпракт, рассчитанного по результатам измерений из выражения bпракт=(2L1 2+2L2 2-4L2)1/2, определяя при этом численное значение веса по зависимости: El=(1+Δb/tL)-1,
где Δb=|bмиры-bпракт|, м; tL - теоретическая точность линейного измерения, м. В качестве прибора может быть использован светодальномер.
На чертеже изображена (вид сверху) мира с контрольными марками и схема дополнительных измерений.
Мира включает контрольные марки B1 B2 В3 в виде отражателей, установленные на горизонтальной штанге с размещением крайних B1, В3 относительно центральной В2 на равных фиксированных расстояниях b1=b2.
Для осуществления способа центральную контрольную марку В2 совмещают с визирной целью (не показана) и непосредственными полевыми измерениями с точностью ms светодальномером (не показан) из положения О измеряют длины визирных лучей L1, L2, L соответственно до крайних B1, В3 и средней В2 контрольных марок миры. По результатам измерений, используя свойство медианы ОВ2 треугольника ΔOB1В3 вычисляют длину стороны |B1В3|, соответствующую расстоянию bпракт между центрами марок B1В3, по формуле bпракт=(2L1 2+2L2 2-4L2)1/2 и найденное значение сравнивают с его фиксированным значением bмиры=b=b1+b2. О весе единичного линейного измерения EL судят по отношению абсолютного значения разности Δb=|bмиры-bпракт| к теоретической точности линейного измерения tL, рассчитываемой как функция измеренных величин (параметров миры). Численное значение EL вычисляют по формуле EL=(1+Δb/tL)-1.
Способ позволяет непосредственно в полевых условиях оценивать с высокой степенью объективности и достоверности результаты единичных линейных измерений визирной цели на расстоянии более 1353 метров.
В таблице ниже приведены примеры результатов дополнительных линейных измерений, производимых для расчета веса единичных линейных измерений, выполненных с помощью светодальномера СТ-5 «Блеск» с точностью измерения расстояний ms=0.007+0.004S и эталонной мирой с расстоянием между крайними отражателями 1,602 м.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСА ЕДИНИЧНОГО ИЗМЕРЕННОГО ПРЕВЫШЕНИЯ ТРИГОНОМЕТРИЧЕСКИМ НИВЕЛИРОВАНИЕМ | 2006 |
|
RU2309383C1 |
| СПОСОБ КОНТРОЛЯ ГЕОДЕЗИЧЕСКИХ ИЗМЕРЕНИЙ И МИРА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2307323C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСА ЕДИНИЧНОГО УГЛОВОГО ИЗМЕРЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2309382C1 |
| СПОСОБ КОНТРОЛЯ ГЕОДЕЗИЧЕСКИХ ИЗМЕРЕНИЙ И МИРА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2234061C1 |
| Оптическая система светодальномера | 1987 |
|
SU1566216A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ЗАДАННЫМ СТВОРОМ И ОБЪЕКТОМ | 1972 |
|
SU339779A1 |
| ВИДЕОСТВОРОФИКСАТОР | 2004 |
|
RU2275600C2 |
| СПОСОБ И СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ ГЕОДЕЗИЧЕСКОГО ЦЕНТРА | 2024 |
|
RU2833419C1 |
| СПОСОБ ЦЕНТРИРОВАНИЯ ИЗМЕРИТЕЛЬНОГО ПРИБОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423664C2 |
| ЭЛЕКТРОННЫЙ НИВЕЛИР | 2024 |
|
RU2834921C1 |
Изобретение относится к геодезической измерительной технике и может быть использовано для оценки непосредственно в полевых условиях с высокой степенью объективности и достоверности результатов единичных линейных измерений на расстоянии более 1353 метров. Сущность: способ предусматривает проведение дополнительных измерений по контрольным маркам миры с тремя горизонтальными марками в виде отражателей. Центральную контрольную марку совмещают с визирной целью и светодальномером с точностью tL измеряют длины визирных лучей L1, L2, L до контрольных марок миры. По результатам измерений вычисляют расстояние между центрами крайних марок по формуле
bпракт=(2L1 2+2L2 2-4L2)1/2 и найденное значение сравнивают с его фиксированным значением bмиры. О весе единичного линейного измерения EL судят по отношению абсолютного значения разности
Δb=|bмиры-bпракт| к теоретической точности линейного измерения tL, рассчитывая его численное значение по формуле EL=(1+Δb/tL)-1. Технический результат: расширение области применения и повышение объективности и достоверности результатов. 1 з.п. ф-лы, 1 ил.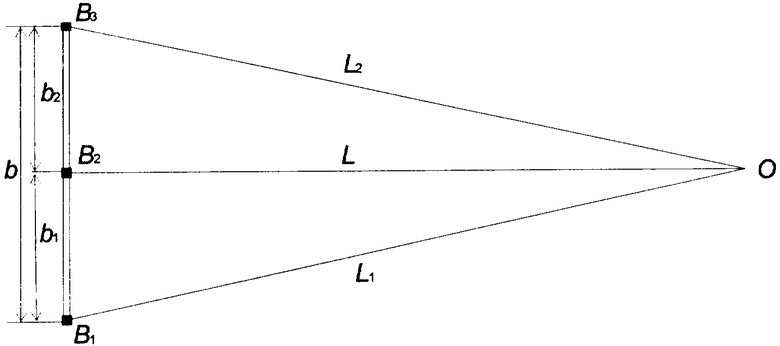
1. Способ определения веса единичного линейного измерения в системе наблюдатель - прибор - визирный луч - визирная цель, предусматривающий проведение дополнительных измерений по контрольным маркам миры и расчет численного значения веса, отличающийся тем, что для измерений используют миру с тремя горизонтальными марками в виде отражателей, центральную из которых совмещают с визирной целью, и измеряют длины визирных лучей L1, L2, L соответственно до крайних и центральной контрольных марок миры, а о весе единичного линейного измерения EL судят по абсолютному значению разности эталонного расстояния bмиры между центрами крайних контрольных марок миры и его практического значения bпракт, рассчитанного по результатам измерений из выражения bпракт=(2L1 2+2L2 2-4L2)1/2, определяя при этом численное значение веса по зависимости
EL=(1+Δb/tL)-1,
где Δb=|bмиры-bпракт|, м,
tL - теоретическая точность линейного измерения, м.
2. Способ по п.1, отличающийся тем, что в качестве прибора используют светодальномер.
| СПОСОБ КОНТРОЛЯ ГЕОДЕЗИЧЕСКИХ ИЗМЕРЕНИЙ И МИРА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2234061C1 |
| СПОСОБ ТРИГОНОМЕТРИЧЕСКОГО НИВЕЛИРОВАНИЯ | 1998 |
|
RU2174672C2 |
| Способ определения высоты точек тригонометрическим нивелированием | 1990 |
|
SU1820213A1 |
| Способ высокоточного геометрического нивелирования и нивелирная рейка для его осуществления | 1981 |
|
SU983459A1 |
| JP 11304467 А, 05.11.1999 | |||
| US 3973327 A, 10.08.1976. | |||

