Изобретение относится к ближней радиолокации и может использоваться в устройствах автономного управления движением взаимодействующих объектов на ограниченных расстояниях.
Автодинные устройства систем ближней радиолокации нашли применение с ранней стадии развития радиолокации [1] и в настоящее время широко используются в устройствах автономного управления движением взаимодействующих объектов на ограниченных расстояниях [2] (например, встреча космических объектов с целью стыковки, аварийной помощи, управление механизмом самого объекта для достижения конечной цели - приведения в рабочее состояние стыковочных устройств, запуска тормозных двигателей, выдача команд в систему телеметрии и т.п.). Автодины находят также применение в близких к радиолокации по характеру различных измерительных устройствах [3, 4].
Предлагаемое автодинное устройство системы ближней радиолокации содержит, кроме автодина, выходной сигнал которого обусловлен радиальной составляющей скорости сближения с объектом, также частотный детектор, выходной сигнал которого обусловлен тангенциальной составляющей скорости сближения с объектом. Таким образом, из отраженного от объекта сигнала предлагаемым автодинным устройством системы ближней радиолокации выделяются две составляющие сигнала, образованные внутренней модуляцией: одна - за счет внутренней амплитудной модуляции, а вторая - за счет внутренней частотной модуляции. Сигнал, образованный внутренней амплитудной модуляцией, обуславливается радиальной составляющей скорости сближения объектов. Сигнал, образованный внутренней частотной модуляцией, обуславливается тангенциальной составляющей скорости сближения объектов. Наличие сигналов, обусловленных двумя составляющими скоростей, обеспечивает повышенную информативность системы о скорости встречи с объектом, а наличием двух выходных сигналов, в основе которых лежат разные частоты модуляции, обеспечивается защита автодинного устройства системы ближней радиолокации от прицельной помехи. Под прицельной понимается помеха, частота которой совпадает с частотой излученного автодином радиосигнала, а ее отклонение не выходит за пределы полосы прозрачности входных цепей автодина [5, 6].
Наиболее близким автодинным устройством системы ближней радиолокации по техническому построению является построение, описанное в [5]. Такое автодинное устройство содержит активный элемент на транзисторе, приемопередающую антенну, катушку антенного колебательного контура, нагрузочный резистор детектора амплитудной модуляции, блокировочный конденсатор питания, первую и вторую клеммы источника питания.
Автодин на одном активном элементе выполняет функции генерирования сигнала, модулирования сигнала и детектирования.
Принцип действия автодинных устройств заключается в том, что при отсутствии объекта наблюдения автодин как генератор через антенну излучает гармоническое колебание, величина которого определяется полным сопротивлением излучения, а на выходе автодина напряжения рабочего сигнала не будет, так как нет отраженного сигнала. Однако при наличии движущегося объекта наблюдения в антенне автодинного устройства наводится дополнительная электродвижущаяся сила, фаза которой изменяется с частотой Доплера, которая, в свою очередь, изменяет фазовую картину генерирования сигнала автодина. В этом случае величина результирующего гармонического колебания автодина определяется дополнительной наведенной в антенне электродвижущей силой, которая, в свою очередь, вызывает изменение сопротивления излучения [5]. Изменение сопротивления излучения приводит к амплитудной модуляции генерируемого сигнала и, затем, детектируясь в межэлектродном пространстве автодина, рабочий сигнал выделяется на нагрузочном резисторе. Частота выделенного рабочего сигнала в результате амплитудной модуляции будет равна доплеровской частоте, так как фазовые соотношения, возникающие между колебаниями, возбуждаемыми в антенне автодином и наводимым отраженным сигналом, изменяются по частоте Доплера.
Главным и важным недостатком такого автодинного устройства системы ближней радиолокации является то, что в нем информативный параметр скорости выходного сигнала представляется по частоте Доплера только радиальной составляющей скорости сближения, которая на относительно малых расстояниях (при сближении автодинного устройства с объектом наблюдения) претерпевает существенные изменения (по косинусоидальному закону [5]), что качественно влияет на изменение эффективности действия конечного исполнительного механизма автономного управления движением взаимодействующих объектов. Кроме того, такое устройство не защищено от прицельных (преднамеренных или случайных) помех, так как даже при отсутствии объекта наблюдения и, соответственно, при отсутствии на входе антенны автодина полезного отраженного сигнала, но при этом на входе антенны автодина имеется сигнал помехи, на выходе такого автодинного устройства будет продетектированный сигнал, вызванный этой помехой.
Техническим результатом реализации предлагаемого автодинного устройства системы ближней радиолокации является, во-первых, повышение эффективности устройства за счет получения повышенной информативности о скорости встречи с объектом наблюдения определением, кроме радиальной, так же тангенциальной составляющей скорости сближения автодинного устройства с наблюдаемым объектом и, во-вторых, увеличение помехоустойчивости к прицельным преднамеренным или случайным помехам.
Технический результат устройства достигается тем, что для повышения эффективности действия автодинного устройства систем ближней радиолокации и защиты его от прицельных помех, состоящего из активного элемента на транзисторе, приемопередающую антенну, первую катушку антенного колебательного контура, нагрузочный резистор детектора амплитудной модуляции, блокировочный конденсатор источника питания, первую и вторую клеммы источника питания, дополнительно вводятся вторая катушка антенного колебательного контура, катушка индуктивной связи, первый диод, второй диод, первый кондесатор частотного детектора, второй конденсатор частотного детектора, первый нагрузочный резистор детектора частотной модуляции, второй нагрузочный резистор детектора частотной модуляции, дроссель.
На фиг.1 представлена электрическая схема предлагаемого автодинного устройства систем ближней радиолокации.
Автодинное устройство системы ближней радиолокации содержит активный элемент на транзисторе 1, приемопередающую антенну 2, первую катушку антенного колебательного контура 3, вторую катушку антенного колебательного контура 4, нагрузочный резистор детектора амплитудной модуляции 5, блокировочный конденсатор источника питания 6, первую и вторую клеммы источника питания 7, катушку индуктивной связи 8, первый диод 9, второй диод 10, первый конденсатор частотного детектора 11, второй конденсатор частотного детектора 12, первый нагрузочный резистор детектора частотной модуляции 13, второй нагрузочный резистор детектора частотной модуляции 14, дроссель 15.
В автодинном устройстве образуются два выхода рабочего сигнала: один с нагрузочного резистора детектора амплитудной модуляции, второй выход - с нагрузочных резисторов детектора частотной модуляции, а элементы 3, 4, 9, 10, 11, 12, 13, 14 и 15 образуют частотный детектор с расстроенными контурами [7, 8].
Автодинное устройство системы ближней радиолокации, имея два выхода: один выход с нагрузочного резистора детектора амплитудной модуляции 5, второй выход с нагрузочных резисторов детектора частотной модуляции 13 и 14, обеспечивает соответствующую оценку радиальной и тангенциальной составляющих величины скорости сближения его с объектом наблюдения на разных, в том числе и на близких расстояниях, и защищено от прицельных помех.
Автодинное устройство системы ближней радиолокации содержит активный элемент на транзисторе 1, приемопередающую антенну 2, первую катушку антенного колебательного контура 3, вторую катушку антенного колебательного контура 4, нагрузочный резистор детектора амплитудной модуляции 5, блокировочный конденсатор питания 6, первую и вторую клеммы источника питания 7, катушку индуктивной связи 8, первый диод 9, второй диод 10, первый конденсатор частотного детектора 11, второй конденсатор частотного детектора 12, первый нагрузочный резистор детектора частотной модуляции 13, второй нагрузочный резистор детектора частотной модуляции 14, дроссель 15. При этом коллектор активного элемента на транзисторе 1 соединен с первым выводом катушки индуктивной связи 8, второй вывод которого соединен с первым выводом блокировочного конденсатора питания 6, второй вывод блокировочного конденсатора питания 6 соединен с эммитром активного элемента транзистора 1 и с первой клеммой источника питания 7, база активного элемента транзистора 1 соединена с анодом второго диода 10 и первым выводом нагрузочного резистора детектора амплитудной модуляции 5, с первым выводом второй катушки антенного колебательного контура 4, с которого снимается выходной сигнал амплитудной модуляции автодина, выход приемопередающей антенны 2 соединен с первым выводом первой катушки антенного колебательного контура 3 и анодом первого диода 9, выход которого соединен с первыми выводами первого конденсатора частотного детектора 11 и первого нагрузочного резистора детектора частотной модуляции 13, с которого снимается выходной сигнал частотной модуляции автодина, вторые выводы первого конденсатора частотного детектора 11 и первого нагрузочного резистора детектора частотной модуляции 13 соединены с первыми выводами второго конденсатора частотного детектора 12, второго нагрузочного резистора детектора частотной модуляции 14 и первым выводом дросселя 15, второй вывод которого соединен со вторыми выводами первой катушки антенного колебательного контура 3 и второй катушки антенного колебательного контура 4. Катод второго диода 10 соединен со вторыми выводами второго конденсатора частотного детектора 12 и второго нагрузочного резистора детектора частотной модуляции 14, а вторая клемма источника питания 7, первый вывод блокировочного конденсатора источника питания 6, вторые выводы второго конденсатора частотного детектора 12, второго нагрузочного резистора детектора частотной модуляции 14 и нагрузочного резистора детектора амплитудной модуляции 5 заземлены.
На фиг.2а представлена векторная диаграмма напряжений антенного контура, а на фиг.2б представлена векторная диаграмма сопротивлений антенного контура
Предлагаемое автодинное устройство системы ближней радиолокации работает следующим образом.
Рассмотрим два условия работы предлагаемого устройства:
1 - объект наблюдения отсутствует; но имеется прицельная помеха;
2 - есть объект наблюдения (независимо от того, имеется прицельная помеха или нет).
1. При отсутствии объекта наблюдения автодин через приемопередающую антенну излучает гармоническое колебание, величина которого  (фиг.2а) определяется полным сопротивлением излучения Zao и постоянным током Im. Из-за отсутствия в цепи автодина модулированного сигнала на нагрузочном резисторе детектора амплитудной модуляции напряжение рабочего сигнала будет отсутствовать. По той же причине на нагрузочных резисторах детектора частотной модуляции напряжения рабочего сигнала так же не будет. Однако при отсутствии объекта наблюдения, но при этом на антенну автодина действует прицельная помеха, тогда на выходе предлагаемого устройства сигнал может появиться, но только на одном выходе автодина (амплитудной модуляции), т.к. частоты рабочих сигналов на двух разных выходах автодина разные, определяемые разными видами (частотами) внутренней модуляции - AM и ЧМ. Наличие сигнала только на одном выходе автодина, обусловленного прицельной помехой, свидетельствует об отсутствии реального объекта наблюдения, что не вызывает опасности ложного срабатывания исполнительной схемы.
(фиг.2а) определяется полным сопротивлением излучения Zao и постоянным током Im. Из-за отсутствия в цепи автодина модулированного сигнала на нагрузочном резисторе детектора амплитудной модуляции напряжение рабочего сигнала будет отсутствовать. По той же причине на нагрузочных резисторах детектора частотной модуляции напряжения рабочего сигнала так же не будет. Однако при отсутствии объекта наблюдения, но при этом на антенну автодина действует прицельная помеха, тогда на выходе предлагаемого устройства сигнал может появиться, но только на одном выходе автодина (амплитудной модуляции), т.к. частоты рабочих сигналов на двух разных выходах автодина разные, определяемые разными видами (частотами) внутренней модуляции - AM и ЧМ. Наличие сигнала только на одном выходе автодина, обусловленного прицельной помехой, свидетельствует об отсутствии реального объекта наблюдения, что не вызывает опасности ложного срабатывания исполнительной схемы.
2. При наличии движущегося объекта в зоне наблюдения в результате поступления от него на приемопередающую антенну устройства отраженного сигнала в антенне наводится дополнительная электродвижущая сила Es, вектор которой изменяет свое фазовое положение с частотой Доплера ωд (фиг.2а). В этом случае результирующее гармоническое колебание в автодине будет Е. Величина Es вызывает дополнительное изменение активной ΔRa и реактивной составляющих ΔХа измененного сопротивления излучения ΔZa (фиг.2б). Изменение активной составляющей сопротивления излучения ΔRa приводит к амплитудному изменению генерируемого сигнала и, детектируясь в автодине, напряжение выделяется с доплеровской частотой на нагрузочном резисторе детектора амплитудной модуляции. Изменение реактивной составляющей сопротивления излучения ΔХа возникает лишь при воздействии на антенну автодина отраженного сигнала от движущегося объекта наблюдения, что приводит к модуляции с доплеровской частотой реактивной составляющей генерируемого результирующего сигнала и, детектируясь в частотном детекторе автодина, напряжение выделяется с доплеровской частотой на нагрузочных резисторах детектора частотной модуляции.
Таким образом, только при наличии объекта наблюдения и отраженного от него сигнала одновременно на двух выходах предлагаемого устройства будут напряжения, обусловленные соответственно активной и реактивной составляющими результирующего сигнала, что позволяет, во-первых, определять полную скорость сближения автодина с наблюдаемым объектом, тем самым повышать его эффективность действия и, во вторых, обеспечить защиту предлагаемого устройства от прицельной помехи, так как при ее действии и отсутствии отраженного сигнала от объекта наблюдения, на выходе предлагаемого устройства появляется сигнал только на одном его выходе - амплитудной модуляции, чем не вызывается опасность ложного срабатывания исполнительной схемы.
Источники информации
1. Hunton R.D., Miller B.J. Generator powered proximity fuze. Electronics. 1945. V 18. №12.
2. Шахтарин Б.И., Сизых В.В., Денисов Л.В. Сигналы и устройства ближней радиолокации. Автодины. - М.: Изд-во МГТУ, 1992. - 140 с.
3. Кошелев Ю.Д. Доплеровский автодинный спидометр. // Передовой научно-технический и производственный опыт. ГОСИНТИ, 1967. №4-67-573/30.
4. А.Н.Дорофеев. Взрыватели ракет. М.: Военное изд. МО СССР. 1963. 87 с.
5. Коган И.М. Ближняя радиолокация (теоретические основы). М.: Сов радио. 1973. 272 с.
6. С.А.Вакин, Л.Н.Шустов. Основы радиопротиводействия и радиотехнической разведки. М.: Сов. Радио, 1978. 448 с.
7. В.Ф.Баркин, В.К.Жданов. Проектирование радиотехнических устройств. М.: Оборонгиз. 1962.
8. В.Д.Горшелев и др. Основы проектирования радиоприемников. М.: Энергия. 1967.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ И УСТРОЙСТВО С АВТОДИННЫМ ПРИЁМОПЕРЕДАТЧИКОМ ДЛЯ КОНТРОЛЯ ДВУХ ЗОН СЕЛЕКЦИИ ЦЕЛИ ПО ДАЛЬНОСТИ | 2023 |
|
RU2822284C1 |
| АВТОДИННЫЙ ФОТОДЕТЕКТОРНЫЙ ПРИЕМОПЕРЕДАТЧИК ДЛЯ СИСТЕМ БЛИЖНЕЙ РАДИОЛОКАЦИИ | 2023 |
|
RU2824039C1 |
| АВТОДИННЫЙ ПРИЕМОПЕРЕДАТЧИК ДЛЯ СИСТЕМ БЛИЖНЕЙ РАДИОЛОКАЦИИ | 2021 |
|
RU2779887C1 |
| СПОСОБ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ И УСТРОЙСТВО С АВТОДИННЫМ ПРИЁМОПЕРЕДАТЧИКОМ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2803413C1 |
| АВТОДИННЫЙ АСИНХРОННЫЙ ПРИЕМОПЕРЕДАТЧИК СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2786415C1 |
| СПОСОБ И УСТРОЙСТВО РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2805901C1 |
| Радиовзрыватель с линейной частотной модуляцией сигнала | 2019 |
|
RU2708765C1 |
| СПОСОБ СИНХРОННОГО ПРИЕМА И ОБРАБОТКИ ЗАПРОСНОГО СИГНАЛА В АВТОДИННОМ ПРИЕМОПЕРЕДАТЧИКЕ СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2789416C1 |
| АВТОДИННЫЙ ПРИЁМОПЕРЕДАТЧИК СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2016 |
|
RU2624993C1 |
| Автодинный радиолокатор | 1991 |
|
SU1775696A1 |
Изобретение относится к радиолокационной технике и может использоваться для автономного управления движением взаимодействующих объектов на ограниченных расстояниях. Достигаемый технический результат - увеличение помехоустойчивости к прицельным преднамеренным или случайным помехам. Устройство содержит активный элемент на транзисторе, приемопередающую антенну, две катушки антенного колебательного контура, нагрузочный резистор детектора амплитудной модуляции, блокировочный конденсатор источника питания, первую и вторую клеммы источника питания, катушку индуктивной связи, два диода, два конденсатора частотного детектора, два нагрузочных резистора детектора частотной модуляции, дроссель. 2 ил.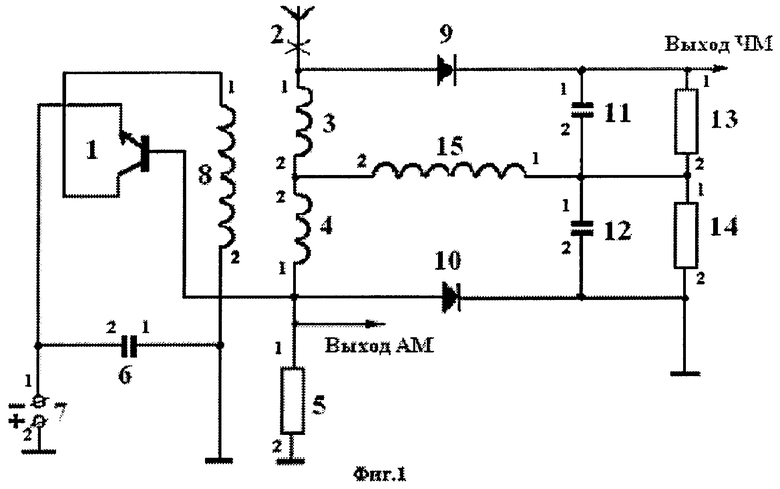
Автодинное устройство системы ближней радиолокации, содержащее активный элемент на транзисторе, приемопередающую антенну, первую катушку антенного колебательного контура, нагрузочный резистор детектора амплитудной модуляции, блокировочный конденсатор источника питания, первую и вторую клеммы источника питания, отличающееся тем, что в него введены вторая катушка антенного колебательного контура, катушка индуктивной связи, первый диод, второй диод, первый конденсатор частотного детектора, второй конденсатор частотного детектора, первый нагрузочный резистор детектора частотной модуляции, второй нагрузочный резистор детектора частотной модуляции, дроссель, при этом коллектор активного элемента на транзисторе соединен с первым выводом катушки индуктивной связи, второй вывод которой соединен с первым выводом блокировочного конденсатора питания, второй вывод блокировочного конденсатора питания соединен с эмиттером активного элемента транзистора и с первой клеммой источника питания, база активного элемента транзистора соединена с анодом второго диода и первым выводом нагрузочного резистора детектора амплитудной модуляции, с первым выводом второй катушки антенного колебательного контура, с которого снимается выходной сигнал амплитудной модуляции автодина, выход приемопередающей антенны соединен с первым выводом первой катушки антенного колебательного контура и анодом первого диода, выход которого соединен с первыми выводами первого конденсатора частотного детектора и первого нагрузочного резистора детектора частотной модуляции, с которого снимается выходной сигнал частотной модуляции автодина, вторые выводы первого конденсатора частотного детектора, первого нагрузочного резистора детектора частотной модуляции соединены с первыми выводами второго конденсатора частотного детектора, второго нагрузочного резистора детектора частотной модуляции и первым выводом дросселя, второй вывод которого соединен со вторыми выводами первой катушки антенного колебательного контура и второй катушки антенного колебательного контура, катод второго диода соединен со вторыми выводами второго конденсатора частотного детектора и второго нагрузочного резистора детектора частотной модуляции, а вторая клемма источника питания, первый вывод блокировочного конденсатора источника питания, вторые выводы второго конденсатора частотного детектора, второго нагрузочного резистора детектора частотной модуляции и нагрузочного резистора детектора амплитудной модуляции заземлены.
| СПОСОБ И СИСТЕМА ДЛЯ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТЕЙ И КООРДИНАТ ОБЪЕКТОВ (ВАРИАНТЫ) | 2003 |
|
RU2255352C2 |
| RU 94003387 A1, 27.08.1996 | |||
| SU 5469174 A, 21.11.1995 | |||
| US 5523760 A, 04.04.1996 | |||
| Устройство для непосредственного определения расстояния до места короткого замыкания на линии с ответвлениями | 1972 |
|
SU479058A1 |

