Изобретение относится к радиолокации с активным ответом и может быть использовано в аэрологических радиозондах (АРЗ) систем радиозондирования атмосферы для измерения наклонной дальности до радиозонда импульсным методом, пеленгации по угловым координатам и передачи телеметрической информации на одной несущей частоте.
Известны радиолокационные системы с активным ответом, которые кроме определения координат объектов используются также для передачи различной телеметрической информации. Примером такого устройства служит система слежения за метеорологическим АРЗ, разработанная английской фирмой Кроули (см. стр. 78-82, [1]; стр. 38-41, [2]). В этой системе координаты АРЗ определяются наземным радиолокационным запросчиком по полученным сигналам ответчика, который размещается на борту АРЗ. Одновременно с определением координат производится регистрация телеметрической информации о состоянии атмосферы (давлении, влажности и температуре), также передаваемой ответчиком.
Передатчик запросчика наземной станции, работающий на частоте 152,5 МГц с импульсной мощностью 50 кВт, генерирует радиоимпульсы запроса с частотой повторения 404 Гц. С помощью антенны типа волновой канал запросные импульсы излучаются в пространство и принимаются приемником АРЗ. Передатчик АРЗ на частоте 2850 МГц вырабатывает ответный радиосигнал с импульсной мощностью 30 Вт. В промежутках между ответными радиоимпульсами передатчик АРЗ передает кодированную информацию о состоянии атмосферы. Прием радиосигналов ответчика наземной станцией производится параболической антенной диаметром 1,5 м. Измерение дальности до АРЗ производится по времени задержки приема ответного радиосигнала относительно запросного, угловых координат - по данным привода антенны. По этим данным вычисляются скорость и направление ветра. Блок телеметрии наземной станции декодирует принятые сигналы и регистрирует метеорологические данные о состоянии атмосферы.
Сложность, громоздкость и большое потребление энергии известной системы радиозондирования являются ее недостатками. Наличие отдельных антенн, передатчика и приемника на разные диапазоны частот (см. рис. 26, стр. 79, [1]; стр. 40, рис. 20, [2]) значительно усложняет и удорожает приемопередающее устройство бортовой аппаратуры АРЗ, которая является по существу расходным материалом при зондировании, поскольку используется разово. Кроме того, большие габариты и вес этой аппаратуры создают угрозу безопасности для самолетов.
Предложенные в 50-е годы прошлого столетия сверхрегенеративные приемопередатчики (СПИ) сначала использовались в авиационных системах опознавания «свой - чужой» (см. стр. 21, рис. 6, [1]). Эти приемопередатчики отличаются предельной простотой конструкции, малыми весом и габаритами благодаря совмещению функций передатчика и приемника в одном каскаде -автогенераторе, работающем в сверхрегенеративном режиме. Позже, благодаря отмеченным качествам, СПП стали применять на борту радиозондов в качестве ответчиков в отечественных системах радиозондирования атмосферы (см. стр. 41-45, [2], авт.свидетельство СССР: SU 115078, опубл. 01.01.1958, [3]).
Высокая чувствительность СПП к радиоимпульсному запросному сигналу позволяет сформировать ответный сигнал по дальности в виде короткой паузы в излучении приемопередатчика при пониженной мощности радиоимпульса радиопередающего устройства запросной РЛС. Достаточно мощное излучение сверхрегенеративного приемопередатчика (СПП) обеспечивает надежное сопровождение АРЗ по угловым координатам и дальности, а также одновременную передачу телеметрической информации о состоянии атмосферы до расстояний 100…150 км [3].
Весьма важным в использовании СПП оказывается тот факт, что система определения координат и канал передачи телеметрической информации системы радиозондирования работают практически на одной частоте, что существенно упростило построение системы радиозондирования в целом. Это явилось решающим фактором при выборе типа приемопередатчика в пользу СПП в АРЗ как устройства разового применения. Дальнейшее развитие теории и техники СПП позволило улучшить его параметры и увеличить дальность сопровождения АРЗ до 250…300 км [4, 5]).
Известны приемопередатчики, входящие в состав аппаратуры АРЗ, предназначенные для приема запросных радиоимпульсов, формирования ответной паузы и передачи телеметрической информации о параметрах атмосферы (см. авт.свидетельства СССР SU 1106262, опубл. 10.01.1997, бюл. №32; SU 1236906 A2, опубл. 20.11.1997, бюл. №32; патенты РФ RU 2172965 C1, опубл. 27.08.2001, бюл. №24; RU 2214614 C2, опубл. 20.10.2003, бюл. №29; RU 2291467 С2, опубл. 10.01.2007, бюл. №27; RU 2470323 C1, опубл. 20.12.2012, бюл. №35; полезные модели РФ RU 49283 U1, опубл. 10.11.2005, бюл. №31; RU 50682 U1, опубл. 20.01.2006, бюл. №2; RU 56001 U1, опубл. 28.03.2006, бюл. №24; RU 67729 U1, опубл. 27.10.2007, бюл. №30; RU 93546 U1, опубл. 27.04.2010, бюл. №12; RU 104326 U1, опубл. 10.05.2011, бюл. №13). Известные приемопередатчики выполнены на основе связанного с антенной СВЧ-генератора, работающего в сверхрегенеративном режиме.
Недостатком известных СПП в системах радиозондирования атмосферы состоит в недостаточной стабильности режима работы устройства, которая ограничивает дальность действия и является причиной частых отказов работы системы. Другим недостатком является реальное расхождение частот приема и передачи СПП, снижающее его чувствительность как приемника.
СВЧ-генератор СПП работает в условиях сложного переходного процесса, сопровождающегося изменениями амплитуды колебаний от уровня собственных шумов (порядка долей микровольта) до больших установившихся значений (десятки вольт). При этом происходят изменения как резистивной, так и реактивной составляющих проводимости активного элемента СВЧ-генератора (транзистора).
Частота приема ωпр определяется как частота максимума амплитудно-частотной характеристики СПП, а частота передачи ωпер - как частота максимума спектра их излучения (см. фиг.3 патента РФ RU 2172965 C1, опубл. 27.08.2001, бюл. №24). Отличия этих частот у СВЧ-генераторов связано с изменениями частоты его генерации в течение переходного процесса формирования радиоимпульса (см. фиг.4 патента РФ RU 2172965 C1, опубл. 27.08.2001, бюл. №24; см. фиг.5, RU 2470323 C1, опубл. 20.12.2012, бюл. №35; публикацию [6]). Данные изменения обусловлены зависимостью реактивной составляющей активного элемента генератора от амплитуды колебаний. При этом следует заметить, что полоса приема, имеющая центральную частоту ωпр, формируется в момент начала
регенеративного нарастания радиоимпульса в генераторе, когда амплитуда еще мала. Тогда как центральная частота излучения приемопередатчика ωпер
соответствует частоте автоколебаний стационарного режима (вершине радиоимпульса), где амплитуда первой гармоники тока активного элемента СВЧ-генератора максимальная. Дополнительное расхождение частот приема ωпр и передачи ωпер вызывают изменения температуры окружающей среды в процессе подъема АРЗ в атмосфере.
Указанные выше противоречия и недостатки известных СПП разрешены путем применения сложной формы запускающих импульсов (например, двухступенчатой) и использованием дополнительных средств для стабилизации режима активного элемента СВЧ-генератора; найдены решения для уменьшения расхождения частот приема и передачи путем перехода от простейшей одноконтурной колебательной системы СВЧ-генератора к двух- и трехконтурным системам (см. патент RU 2345379 C1, опубликовано 27.01.2009, бюллетень №3).
Однако у известных аналогов имеются общие существенные недостатки.
1. Недостаточная чувствительность устройства в режиме приема, которая ограничивается ударными колебаниями, присущими сверхрегенеративному режиму работы СВЧ-генератора при формировании переднего фронта радиоимпульса (см. стр. 140-146, монографии [7]; фиг.4, патента РФ RU 2345379 C1, опубл. 27.01.2009, бюл. №3; фиг.4, патента РФ RU 2470323 C1, опубл. 20.12.2012, бюл. №35; статью [8]).
2. Асинхронность процессов формирования приемного окна СПП и посылок запросных радиоимпульсов наземной РЛС вызывает дополнительные флуктуации временного положения, глубины и продолжительности ответной паузы (см. фиг.5 патента РФ RU 2368916 C2, опубл. 27.09.2009, бюл. №27; стр. 566, рис. 4.4.18, монографии [5]). Этот фактор является причиной принципиально неустранимой составляющей дополнительной ошибки измерения наклонной дальности.
3. Недостаточная помехозащищенность СПП от воздействия активных помех. При появлении помех на частоте приема СПП формирует ложные ответные паузы, которые при продолжительном воздействии помех нарушают работу каналов измерения дальности и приема телеметрической информации системы радиозондирования.
4. Сложность настройки СПП, связанная с тем, что изменения одного из параметров влечет изменение другого, например, регулировка условий возбуждения колебаний вызывает изменение несущей частоты, что отмечено в патенте РФ RU 2470323 C1 (опубл. 20.12.2012, бюл. №35).
Свободным от указанных недостатков является автодинный приемопередатчик (АЛЛ) согласно патенту РФ RU 2624993 C1 (опубл. 11.07.2017, бюл. №20) [9], принятый в качестве прототипа. Устройство содержит СВЧ-генератор с возможностью электрического управления частотой и связанную с ним антенну, причем к СВЧ-генератору подключены последовательно соединенные устройство выделения автодинного сигнала, усилитель, обнаружитель запросного сигнала и формирователь импульса ответной паузы, при этом выход формирователя импульсов ответной паузы связан с СВЧ-генератором, а обнаружитель запросного сигнала содержит последовательно соединенные полосовой фильтр, линейный амплитудный детектор, компаратор и временной селектор запросных импульсов, при этом АПП работает в режиме биений, когда частота СВЧ-генератора отстоит от частоты принимаемых радиоимпульсов запроса на величину более половины полосы синхронизации.
Однако у прототипа имеются следующие существенные недостатки.
1. В момент пуска АРЗ расстояние до запросного радиолокатора небольшое (десятки метров). При этом уровень сигнала запроса наибольший и в АПП может наблюдаться ряд нежелательных нелинейных явлений. Так, в режиме высокого уровня сигнала запроса полоса синхронизации значительно расширяется и может составлять порядка 10…20 МГц и более. Поскольку частота биений определяется как разность между частотой запросного сигнала и частотой ближайшей границы полосы синхронизации СВЧ-генератора (см. стр. 37-42, [10]), то частота преобразованного на выходе устройства регистрации автодинного сигнала уменьшается на половину полосы синхронизации (порядка 5…10 МГц и более). В результате такого смещения частоты биений преобразованный сигнал может, во-первых, выйти за пределы полосы пропускания полосового фильтра и тем самым нарушить нормальную работу АПП и, соответственно, системы радиозондирования. Во-вторых, при приближении частоты сигнала запроса к границе полосы синхронизации собственные колебания СВЧ-генератора подвергаются значительной амплитудной и частотной модуляции [11]. Спектр этих колебаний «рассыпается» на гармоники (см. фиг.27, [12]) частоты биений, создающие дополнительные помехи радиосредствам. В таком случае преобразованный СВЧ-генератором сигнал формируется с ангармоническими искажениями (см. стр. 37-42, рис. 1.14, [10]), создающими проблемы при его обработке. Кроме того, в режиме высокого уровня сигнала запросного радиолокатора может происходить захват частоты АПП. При этом сигнал биений на выходе полосового фильтра отсутствует и происходит сбой в работе АПП. Отсюда следует основной недостаток прототипа - низкая надежность работа АПП и, соответственно, системы радиозондирования в диапазоне малых дальностей до АРЗ (от десятков до порядка нескольких сотен метров). При этом необходимо отметить, что данные состояния приземных слоев атмосферы на указанных высотах востребованы для многих служб прогноза погоды.
Технически описанная проблема приведения АПП в рабочий режим при пуске АРЗ на малых расстояниях, может быть решена путем доработки передатчика РЛС, например, введением специального режима автоматического изменения его выходной мощности и/или перестройки частоты запросного сигнала в процессе радиозондирования. Однако внесение этих доработок и изменений в РЛС, находящихся в эксплуатации на действующей сети радиозондирования, ради использования предлагаемого АПП представляются неприемлемыми из-за их технической сложности и высокой стоимости такой модернизации. Другой путь технического решения проблемы может быть реализован на борту АРЗ путем предлагаемого усовершенствования АПП.
2. Селекция запросного сигнала по его длительности не отличается высокой надежностью защиты АПП от формирования ложной ответной паузы при постановке преднамеренных помех (см. стр. 138-141, [13]). Генерация помех в виде хаотической последовательности радиоимпульсов вызывает информационный ущерб системе радиозондирования путем нарушения нормальной работы АПП (см. стр. 127-130, [14]). При этом возможны отказы работы каналов измерения дальности и приема телеметрической информации в РЛС системы радиозондирования. Отсюда следует, что прототип обладает недостаточной защищенностью к воздействию активных помех.
Таким образом, техническая проблема, на решение которой направлено заявляемое изобретение, состоит в необходимости расширения диапазона рабочих дальностей действия системы радиозондирования в область малых расстояний, расширение динамического диапазона АПП по уровню сигнала запроса и повышения устойчивости АПП к воздействию активных помех в виде хаотической последовательности радиоимпульсов.
Сложность решения указанной проблемы состоит в том, что предлагаемое устройство выполняет одновременно функции приемника и радиолокационного ответчика сигналов в системе радиозондирования, а также передатчика телеметрической информации о состоянии атмосферы. При этом входом и выходом АПП является одна и та же антенна, работающая как на прием, так и на передачу. В случае приема запросного сигнала стоит задача ограничения и стабилизации воздействующего на СВЧ-генератор уровня сигнала запроса, а в случае формирования ответной паузы желательно полное прерывание излучения СВЧ-генератора в антенну. Вторая функция устройства - передача телеметрической информации о состоянии атмосферы - должна осуществляться в промежутках времени между моментами приема запросных радиосигналов без потери выходной мощности излучения СВЧ-генератора в антенне. Кроме того, стоит задача повышения устойчивости АПП к воздействию активных помех в виде хаотической последовательности радиоимпульсов.
Технический результат достигается тем, что в предлагаемом автодинном асинхронном приемопередатчике системы радиозондирования атмосферы, содержащим антенну и последовательно соединенные СВЧ-генератор с возможностью электрического управления частотой и его включением, устройство регистрации автодинного сигнала, полосовой усилитель, детектор радиоимпульсов, компаратор с гистерезисом, временной селектор импульсов и формирователь импульсов ответной паузы, для решения указанной проблемы дополнительно введены управляемый аттенюатор и устройство управления, причем управляемый аттенюатор высокочастотными портами включен между антенной и СВЧ-генератором, выход формирователя ответной паузы подключен к первому выводу устройства управления, а его второй вывод - к управляющему входу управляемого аттенюатора, а к третьему выводу устройства управления подключен выход детектора радиоимпульсов. При этом частота СВЧ-генератора отстоит от частоты принимаемых радиоимпульсов запроса на величину не менее половины полосы синхронизации.
Сущность предлагаемого изобретения состоит в том, что вновь вводимые устройства и узлы образуют цепь автоматического регулирования, обеспечивающую практически постоянный уровень воздействующего на СВЧ-генератор запросного радиосигнала РЛС и формирование закона управления управляемым аттенюатором, обеспечивающего необходимые режимы для нормальной работы системы радиозондирования, в том числе повышение устойчивости автодинного приемопередатчика к воздействию хаотических радиоимпульсных помех.
Сравнение заявляемого приемопередатчика с прототипом показывает наличие вновь вводимых устройств, а именно, управляемого аттенюатора и устройства управления, а также введение дополнительной связи с выхода детектора радиоимпульсов на устройство управления.
В результате поиска альтернативных решений в данной и смежной областях применения АПП и радиолокационных приемоответчиков среди различных источников установлено, что известные устройства отличаются составом элементов и связями между ними. Среди этих источников, например, есть авт.свидетельства СССР SU 671515 A1 (опубл. 30.03.1984, бюл. №12); SU 854163 A1 (опубл. 30.05.1992, бюл. №20); SU 1818605 A1 (опубл. 30.05.1993, бюл. №20); патенты РФ RU 2096805 C1 (опубл. 20.11.1997); RU 2191403 C1 (опубл. 20.10.2002, бюл. №29); RU 2193783 C2 (опубл. 27.11.2011, бюл. №33); RU 2242020 C2 (опубл. 10.07.2004, бюл. №19); RU 2321021 C1 (опубл. 27.03.2008, бюл. №9); RU 2338221 C1 (опубл. 10.11.2008, бюл. №31); RU 2343501 C1 (опубл. 10.01.2009, бюл. №1); патенты РФ на полезную модель RU 166135 U1 (опубл. 20.11.2016, бюл. №32), RU 87542 U1 (опубл. 10.10.2009, бюл. №28), RU 116650 U1 (опубл. 27.05.2012, бюл. №15); фиг.1 и 2 патента США US 5486830 A (опубл. 23.01.1996) и литература (см. стр. 706, фиг.13.8, [15]; стр. 658-659, рис. 23.2, 23.3, [16]; стр. 489, рис. 7, [17]; стр. 497-501, рис. 11.1, [18]; стр. 83-86, рис. 3.18, [19]; стр. 758-774, рис. 14.12, [20]; стр. 43-47, рис. 2.18, [21]). Известные устройства выполнены на основе СВЧ-генераторов, работающих в сверхрегенеративном режиме, или в них предусмотрены отдельные узлы приемника запросного радиоимпульса и передатчика ответного сигнала. Кроме того, введение управляемого аттенюатора и особым образом выполненного устройства управления, а также введение дополнительной связи с выхода детектора радиоимпульсов решения указанной проблемы в АПП из общедоступных источников неизвестно, что позволяет сделать вывод о соответствии предлагаемого решения критерию «Новизна».
Вновь вводимые устройства описаны в общедоступной литературе. Однако их включение в соответствии с вышеуказанными связями дает возможность стабилизировать режим работы СВЧ-генератора в автодинном режиме, избежать захвата его частоты и ангармонических искажений автодинного сигнала при сильном сигнале запроса, расширить рабочий диапазон системы радиозондирования в область малых расстояний между РЛС и АРЗ, блокировать влияние хаотических радиоимпульсных помех, повысив помехоустойчивость и надежность работы системы радиозондирования атмосферы. Такое решение явным образом не следует из уровня техники, что соответствует критерию «Изобретательский уровень».
Изобретение направлено на улучшение характеристик работы систем радиозондирования, предназначенных для получения метеорологических данных о состоянии атмосферы, что необходимо для различных отраслей деятельности человека. Таким образом, заявляемое изобретение соответствует критерию «Промышленная применимость».
Сущность изобретения поясняется чертежом на фиг.1, на котором представлена структурная схема автодинного асинхронного приемопередатчика (ААПП). На чертеже фиг.2 представлен один из вариантов функциональной схемы устройства управления.
ААПП системы радиозондирования атмосферы содержит (см. фиг.1) последовательно соединенные антенну 1, управляемый аттенюатор 2, СВЧ-генератор 3 с возможностью электрического управления частотой, устройство 4 регистрации (выделения) преобразованного (автодинного) сигнала, полосовой усилитель 5, детектор радиоимпульсов 6 преобразованного сигнала запроса, компаратор 7 с гистерезисом, временной селектор 8 запросного сигнала, формирователь 9 импульсов ответной паузы и устройство 10 управления, подключенное своим выходом к входу (см. вывод 2) управляемого аттенюатора 2, при этом выход детектора 6 радиоимпульсов подключен к дополнительному входу (см. вывод 3) устройства 10 управления.
Антенна 1 может иметь различное исполнение, зависящее от требований к диаграмме направленности и рабочего диапазона частот, например, в виде несимметричного четвертьволнового вибратора согласно фиг.4 и 8 патента РФ RU2214614C2 (опубл. 20.10.2003, бюл. №29), щелевого или полоскового вибратора, рупорной, диэлектрической стержневой, спиральной антенны или типа «волновой канал» (см. соответственно стр. 115, 149, 218, 239, 260, [22]).
Управляемый аттенюатор 2 имеет альтернативные технические решения. Он может быть выполнен на pin-диодах и/или полевых транзисторах, созданных по технологиям GaAs, КМОП, GaN, SiGe [23]. При выполнении управляемого аттенюатора 2 на pin-диодах согласно схем, приведенным в описаниях к авт.свидетельствам СССР SU1290442A1 (опубл. 15.02.1987, бюл. №6) и SU1345275A1 (опубл. 15.10.1987, бюл. №38), можно создать управляемый аттенюатор с максимальным ослаблением примерно 30 и более дБ при малых прямых потерях, улучшенном согласовании входа и выхода и с увеличенной крутизной регулировочной характеристики. При выполнении управляемого аттенюатора 2 на полевых транзисторах согласно схем, приведенным в описаниях к патентам РФ РФ RU 2461920 C1 (опубл. 20.09.2012, бюл. №26), RU 2324265 C2 (опубл. 10.05.2008, бюл. №13) и RU 2435255 C1 (опубл. 27.11.2011, бюл. №33), можно создать управляемый аттенюатор 2, обладающий, кроме отмеченных здесь достоинств, также значительно уменьшенными массогабаритными параметрами. При этом возможность его монолитно-интегрального выполнения вписывается в одну из основных тенденций развития современной полупроводниковой электроники СВЧ [24].
СВЧ-генератор 3, может быть выполнен, например, в виде СВЧ генераторного модуля на основе транзистора (см. фиг.7 и 8 патента RU 2345379С1, опубл. 27.01.2009, бюл. №3), на диоде Ганна или лавинно-пролетном диоде (см. стр. 194, 195, рис. 4.24 и 4.25, [25]). Для обеспечения модуляции частоты генерации сигналом телеметрии в резонатор СВЧ-генератора может быть помещен варикап (см. стр. 80-84, [26]) или использован метод модуляции изменением питающего напряжения (см. рис. 18, статьи [27]).
Устройство 4 регистрации преобразованного автодинного сигнала также имеет альтернативные технические решения. Например, при регистрации сигнала в цепи питания СВЧ-генератора 3 устройство 4 может быть выполнено в соответствие с одной из схем, представленных на рис. 14 статьи [27], или по схеме с трансформаторно-емкостной связью контуров (см. рис. 74, монографии [28]). В случае регистрации сигнала по изменению амплитуды колебаний устройство 4 регистрации сигнала обычно выполняется на основе детекторного диода. Этот диод помещается непосредственно в резонатор СВЧ-генератора 3 или в связанную с резонатором передающую линию, как показано на фиг.2 патента РФ RU2295911C1 (опубл. 27.03.2007, бюл. №9) и на рис. 6а и 9а статьи [27].
Полосовой усилитель 5 преобразованного сигнала может быть выполнен в виде обычного полосового усилителя с линейной амплитудной характеристикой в рабочем диапазоне уровней сигнала (см., например, стр. 112-118, рис. 3.28 и 3.30, [29]).
Детектор 6 радиоимпульсов преобразованного сигнала запроса может быть выполнен по схеме диодного детектора (см. рис. 5.22 на стр. 191, [29]). Постоянная времени τн нагрузки этого детектора выбирается из условия (см. стр. 191-194, [29]):

где
 - постоянная времени нагрузки;
- постоянная времени нагрузки;
 - сопротивление и емкость нагрузки;
- сопротивление и емкость нагрузки;
 - период повторения запросных импульсов. Компаратор 7 с гистерезисом может быть выполнен на микросхеме К521САЗ согласно электрической схеме, приведенной на рис. 6.7б, стр. 170, [30]. Гистерезис необходим для защиты сигналов устройства от многократных срабатываний, вызванных шумами входного сигнала.
- период повторения запросных импульсов. Компаратор 7 с гистерезисом может быть выполнен на микросхеме К521САЗ согласно электрической схеме, приведенной на рис. 6.7б, стр. 170, [30]. Гистерезис необходим для защиты сигналов устройства от многократных срабатываний, вызванных шумами входного сигнала.
Временной селектор 8 запросных сигналов может быть выполнен по одной из электрических схем селекторов импульсов по длительности, представленных в литературе. Примеры реализации приведены на рис. 7.8, 7.9 стр. 342-343 книги [13]; на рис. 6.8 и описанных на стр. 117-119 книги [31], а также на стр. 509-511, 516-517 книги [32].
Формирователь 9 импульса ответной паузы может быть выполнен на микросхеме К564АГ1 (см. рис. 2.83а, стр. 287-290 справочника [33]). На этой схеме генератор G1 выполняет функцию формирователя 9 импульса ответной паузы.
Устройство 10 управления (см. фиг.2) имеет альтернативные технические решения, зависящие от варианта выполнения управляемого аттенюатора.
Первый вариант выполнения устройства 10 управления (см. фиг.2) для случая применения управляемого аттенюатора 2 на pin-диодах согласно схеме, приведенной в описании к авт.свидетельству СССР SU 1290442 A1 (опубл. 15.02.1987, бюл. №6), содержит первый 11, второй 12 и третий 13 резисторы, первый 14 и второй 15 биполярные транзисторы, полевой транзистор 16, первый 17, второй 18 и третий 19 электронные коммутаторы, пиковый детектор 20, формирователь 21 импульсов блокировки помех, клеммы подключения источников питания 22 и смещения 23, общую шину 24 питания, а также первый, второй и третий выводы устройства 10 управления (обозначены мелким шрифтом соответственно цифрами 1, 2. 3), при этом базы первого 14 и второго 15 биполярных транзисторов подключены через первый 11 и третий 13 резисторы к клемме 23 источника смещения, эмиттеры этих транзисторов соединены вместе и подключены через второй 12 резистор к клемме 22 источника питания, коллектор второго 15 биполярного транзистора соединен с общей шиной 24, а к его базе дополнительно подключен сток полевого транзистора 16, исток которого соединен с общей шиной 24, канал управляемой проводимости второго 18 электронного коммутатора подключен параллельно третьему 13 резистору, первый вывод устройства управления 10 подключен к входу запуска формирователя 21 импульсов блокировки помех, первый выход которого подключен к управляющему входу второго 18 электронного коммутатора, канал управляемой проводимости первого 17 электронного коммутатора подключен между общей шиной 24 и вторым выводом устройства 10 управления, с которым соединен также коллектор первого 14 биполярного транзистора, первый вывод устройства 10 управления дополнительно связан с управляющим входом первого 17 электронного коммутатора через канал управляемой проводимости третьего 19 электронного коммутатора, управляющий вход которого подключен ко второму выходу формирователя 21 импульсов блокировки помех, при этом третий вывод устройства 10 управления связан с затвором полевого транзистора 16 через пиковый детектор 20.
Следует отметить, что для нормального функционирования аттенюатора 2 в паре с представленным на фиг.2 устройством 10 управления полярность подключения всех входящих в управляемый аттенюатор 2 pin-диодов необходимо изменить на обратную (см. схему в описании к авт.свидетельству СССР SU 1290442 A1, опубл. 15.02.1987, бюл. №6), что не меняет сути этого изобретения.
Второй вариант выполнения устройства 10 управления (см. фиг.2) для случая применения управляемого аттенюатора 2 на полевых транзисторах согласно схеме, приведенной в описании к патенту РФ RU 2461920 C1 (опубл. 20.09.2012, бюл. №26), содержит первый 11, второй 12 и третий 13 резисторы, первый 14 и второй 15 биполярные транзисторы, полевой транзистор 16, первый 17, второй 18 и третий 19 электронные коммутаторы, пиковый детектор 20, формирователь 21 импульсов блокировки помех, клеммы подключения источников питания 22 и смещения 23, общую шину 24 питания, четвертый резистор 25, а также первый, второй и третий выводы устройства 10 управления (обозначены мелким шрифтом соответственно цифрами 1, 2. 3), при этом базы первого 14 и второго 15 биполярных транзисторов подключены через первый 11 и третий 13 резисторы к клемме 23 источника смещения, эмиттеры этих транзисторов соединены вместе и подключены через второй 12 резистор к клемме 22 источника питания, коллектор первого 14 биполярного транзистора соединен со вторым выводом устройства 10 управления и первым выводом четвертого 25 резистора, второй вывод которого подключен к общей шине 24, коллектор второго 15 биполярного транзистора соединен с общей шиной 24, а к его базе дополнительно подключен сток полевого транзистора 16, исток которого соединен с общей шиной 24, канал управляемой проводимости первого 17 электронного коммутатора подключен параллельно четвертому 25 резистору, а канал управляемой проводимости второго 18 электронного коммутатора подключен параллельно третьему 13 резистору, первый вывод устройства управления 10 подключен к входу запуска формирователя 21 импульсов блокировки помех, первый выход которого подключен к управляющему входу второго 18 электронного коммутатора, первый вывод устройства 10 управления дополнительно связан с управляющим входом первого 17 электронного коммутатора через канал управляемой проводимости третьего 19 электронного коммутатора, управляющий вход которого подключен ко второму выходу формирователя 21 импульсов блокировки помех, при этом третий вывод устройства 10 управления связан с затвором полевого транзистора 16 через пиковый детектор 20.
Необходимо отметить, что при использовании управляемого аттенюатора 2, выполненного по схеме на полевых транзисторах (см. патент РФ RU 2461920 C1), управление им производится соответствующим законом изменения не тока, а напряжения на выходе устройства 10 управления. Поэтому для преобразования тока в напряжение на схеме фиг.2 между выводом 2 и общей шиной 24 устройства 10 управления подключен резистор 25, линии проводников которого показаны пунктиром.
Первый 17, второй 18 и третий 19 электронные коммутаторы (см. фиг.2) могут быть выполнены, например, на микросхеме К176КТ1, содержащей четыре коммутатора цифровых и аналоговых сигналов, каждый из которых имеет вход управления и канал управляемой проводимости (см. стр. 225-226, рис. 2.27, [33]).
Пиковый детектор 20 может быть выполнен по схеме диодного детектора (см. рис. 5.25, стр. 194-196, [29]). Постоянная времени пикового детектора 20 должна быть как минимум на порядок больше периода повторения запросных импульсов РЛС:

где
 - постоянная времени нагрузки;
- постоянная времени нагрузки;
 - сопротивление и емкость нагрузки;
- сопротивление и емкость нагрузки;
 - период повторения запросных импульсов,
- период повторения запросных импульсов,  - их частота.
- их частота.
Формирователь 21 импульсов блокировки помех может быть выполнен на микросхеме К564АГ1 согласно схеме рис. 2.83а на стр. 287-290 справочника [33], где генератор G2, функционирующий как формирователь задержанного импульса, реализует функцию генерации импульсов блокировки помех.
ААПП работает следующим образом.
При подаче на ААПП напряжения питания в СВЧ-генераторе 3 (см. фиг.1) возникают колебания СВЧ на частоте  , которые, пройдя через управляемый аттенюатор 2, излучаются антенной 1 в виде электромагнитных волн в окружающее пространство. При этом сигнал телеметрии
, которые, пройдя через управляемый аттенюатор 2, излучаются антенной 1 в виде электромагнитных волн в окружающее пространство. При этом сигнал телеметрии  подаваемый на встроенный в резонатор СВЧ-генератора 3 варикап или в цепь управления питанием СВЧ-генератора 3 вызывает узкополосную частотную модуляцию этого излучения.
подаваемый на встроенный в резонатор СВЧ-генератора 3 варикап или в цепь управления питанием СВЧ-генератора 3 вызывает узкополосную частотную модуляцию этого излучения.
В соответствии с заложенным в работу радиолокационной станции (РЛС) принципом действия (см. стр. 74-87, [5]) радиоприемное устройство РЛС посредством направленной антенны осуществляет прием телеметрического сигнала с борта АРЗ, его детектирование и дешифрацию, а также регистрацию данных о температуре, влажности и давлении. При этом системой привода и управления антенной выполняется измерение угловых координат положения АРЗ относительно РЛС, которые совместно с данными о расстоянии до АРЗ обеспечивают определение скорости и направления ветра. Отметим, что в процессе приема сигналов АРЗ системой автоматической подстройки частоты (АПЧ) РЛС производится коррекция частоты задающего генератора передатчика на частоту  запросного сигнала.
запросного сигнала.
Радиопередающее устройство РЛС вырабатывает периодические (с частотой повторения около  Гц) посылки длительностью
Гц) посылки длительностью  радиоимпульсов запроса (порядка 1…2 мкс). Данные радиоимпульсы в виде электромагнитного (ЭМ) излучения с помощью направленной антенны РЛС на центральной частоте
радиоимпульсов запроса (порядка 1…2 мкс). Данные радиоимпульсы в виде электромагнитного (ЭМ) излучения с помощью направленной антенны РЛС на центральной частоте  распространяются в направлении АРЗ.
распространяются в направлении АРЗ.
Принятое на борту АРЗ антенной 1 излучение на частоте  преобразуется в электрические колебания, которые в виде запросных радиоимпульсов, пройдя через управляемый аттенюатор 2, поступают в резонатор СВЧ-генератора 3. Здесь они смешиваются с собственными колебаниями СВЧ-генератора 3, имеющими частоту
преобразуется в электрические колебания, которые в виде запросных радиоимпульсов, пройдя через управляемый аттенюатор 2, поступают в резонатор СВЧ-генератора 3. Здесь они смешиваются с собственными колебаниями СВЧ-генератора 3, имеющими частоту  . Образовавшаяся смесь колебаний, взаимодействуя на нелинейности активного элемента СВЧ-генератора 3, вызывает автодинные изменения частоты и амплитуды колебаний, а также среднего значения величины смещения (тока или напряжения) активного элемента. При этом происходит перенос энергии принимаемого сигнала на разностную частоту
. Образовавшаяся смесь колебаний, взаимодействуя на нелинейности активного элемента СВЧ-генератора 3, вызывает автодинные изменения частоты и амплитуды колебаний, а также среднего значения величины смещения (тока или напряжения) активного элемента. При этом происходит перенос энергии принимаемого сигнала на разностную частоту  , так называемых биений (см. стр. 37-42, рис. 1.14, [10]) в соответствие с известным принципом работы автодинного преобразователя частоты (см. стр. 284-297, [34]).
, так называемых биений (см. стр. 37-42, рис. 1.14, [10]) в соответствие с известным принципом работы автодинного преобразователя частоты (см. стр. 284-297, [34]).
Автодинные изменения величины смещения (тока или напряжения) активного элемента или амплитуды колебаний СВЧ-генератора 3 с помощью устройства 4 регистрации автодинного отклика преобразуются в выходные сигналы, которые внешне повторяют вид запросных радиоимпульсов РЛС, но заполнены колебаниями с частотой биений ωб. Эти радиоимпульсы после
усиления в полосовом усилителе 5 поступают на детектор 6 радиоимпульсов запросного сигнала РЛС. Здесь радиоимпульсы преобразуются в видеоимпульсы, амплитуда которых пропорциональна амплитуде запросных радиоимпульсов, и поступают далее на компаратор 7, а также на третий вывод устройства 10 управления.
В случае превышения амплитудой видеоимпульсов порогового уровня компаратора 7 в нем происходит формирование выходных импульсов. При этом наличие гистерезиса уровней срабатывания компаратора 7 избавляет выходные импульсы от многократных срабатываний в моменты перехода сигналами порогового уровня из-за влияния сопутствующих шумов. Далее выходные импульсы компаратора 7 поступают на вход временного селектора 8 импульсов запроса. Здесь при соответствии длительности поступающих импульсов временным параметрам запросных сигналов РЛС, заложенных в параметры временного селектора 8, вырабатываются выходные импульсы, которые далее поступают на вход формирователя 9 импульса ответной паузы, имеющих длительность  порядка 2…3 мкс. Эти импульсы поступают на первый вывод устройства 10 управления (см. фиг.2).
порядка 2…3 мкс. Эти импульсы поступают на первый вывод устройства 10 управления (см. фиг.2).
Устройство 10 управления на своем выходе (вывод 2) задает определенную величину тока управления в зависимости от уровня запросных радиоимпульсов и рабочего интервала времени внутри каждого периода Тп повторения запросных радиоимпульсов РЛС. Рассмотрим работу этого устройства для каждого интервала времени отдельно.
На интервале времени  приема запросных импульсов РЛС на первом выводе устройства 10 управления (см. фиг.2) импульс ответной паузы отсутствует. При этом каналы управляемой проводимости первого 17 и второго 18 электронных коммутаторов находятся в положении «разомкнуто», а канал управляемой проводимости третьего 19 электронного коммутатора - «замкнуто», поскольку на входах управления первого 17 и второго 18 электронных коммутаторов напряжения равны логическому нулю, а третьего 19 - соответствует уровню логической единицы.
приема запросных импульсов РЛС на первом выводе устройства 10 управления (см. фиг.2) импульс ответной паузы отсутствует. При этом каналы управляемой проводимости первого 17 и второго 18 электронных коммутаторов находятся в положении «разомкнуто», а канал управляемой проводимости третьего 19 электронного коммутатора - «замкнуто», поскольку на входах управления первого 17 и второго 18 электронных коммутаторов напряжения равны логическому нулю, а третьего 19 - соответствует уровню логической единицы.
Дифференциальный каскад, выполненный на первом 14 и втором 15 биполярных транзисторах, в соответствие с принципом действия (см. стр. 368-377, [35]) реализует управляемый источник тока. Он задает величину тока на выводе 2 устройства управления 10, зависящую от значения номинала второго 12 резистора и величины разности напряжений на клеммах питания 22 и смещения 23, подаваемой на базы первого 14 и второго 15 биполярных транзисторов. В случае отсутствия на входе антенны 1 радиосигналов запроса видеоимпульсы на выходе детектора 6 радиоимпульсов отсутствуют. Поэтому напряжения на выводе 3 устройства 10 управления, на выходе пикового детектора 20 и, соответственно, на затворе полевого транзистора 16 также отсутствуют. Для этого случая величина тока через вывод 2 устройства 10 управления соответствует номинальному значению, которое рассчитывается по следующей формуле:

где
 - номинальная величина тока через вывод 2 устройства 10 управления;
- номинальная величина тока через вывод 2 устройства 10 управления;
 - величина напряжения источника питания, подводимого к клемме 22 устройства 10 управления;
- величина напряжения источника питания, подводимого к клемме 22 устройства 10 управления;
 - величина напряжения источника смещения, подводимого к
- величина напряжения источника смещения, подводимого к
клемме 23 устройства 10 управления, при этом напряжение этого источника должно быть по величине меньше напряжения источника Е22 питания;
 - величина постоянного падения напряжения на переходе база-эмиттер первого 14 и второго 15 биполярных транзисторов в номинальном режиме, которая для кремниевых транзисторов обычно составляет 0,6…0,8 В (см. стр. 61, [36]);
- величина постоянного падения напряжения на переходе база-эмиттер первого 14 и второго 15 биполярных транзисторов в номинальном режиме, которая для кремниевых транзисторов обычно составляет 0,6…0,8 В (см. стр. 61, [36]);
 - величина номинального сопротивления второго 12 резистора устройства 10 управления.
- величина номинального сопротивления второго 12 резистора устройства 10 управления.
Значение номинального тока  через вывод 2 устройства 10 управления должно соответствовать паспортной величине (см. стр. 92, [37]) тока выбранного типа pin-диода, при которой в схеме управляемого аттенюатора 2, выполненного согласно описанию к авт.свидетельству СССР SU 1290442 A1 (опубл. 15.02.1987, бюл. №6), они находятся в режиме малого сопротивления (несколько Ом) для СВЧ-колебаний. При этом сигналы СВЧ проходят через управляемый аттенюатор 2 с малыми потерями, причем независимо от направления прохождения, от антенны 1 к СВЧ-генератору 3 или обратно.
через вывод 2 устройства 10 управления должно соответствовать паспортной величине (см. стр. 92, [37]) тока выбранного типа pin-диода, при которой в схеме управляемого аттенюатора 2, выполненного согласно описанию к авт.свидетельству СССР SU 1290442 A1 (опубл. 15.02.1987, бюл. №6), они находятся в режиме малого сопротивления (несколько Ом) для СВЧ-колебаний. При этом сигналы СВЧ проходят через управляемый аттенюатор 2 с малыми потерями, причем независимо от направления прохождения, от антенны 1 к СВЧ-генератору 3 или обратно.
В случае наличия на интервале времени запросного радиоимпульса
запросного радиоимпульса
РЛС на входе пикового детектора 20 устройства 10 управления присутствует видеоимпульс, поступающий с выхода детектора 6 радиоимпульсов. Амплитуда этого видеоимпульса, как отмечалось, пропорциональна уровню принимаемого запросного сигнала РЛС. На выходе пикового детектора 20 (см. фиг.2) происходит запоминание амплитуды видеоимпульса и последующее усреднение его величины на интервале порядка десяти видеоимпульсов, следующих друг за другом с периодом  повторения запросных сигналов РЛС. Усреднение достигается, как отмечалось, благодаря выбору постоянной времени нагрузки пикового детектора 20 такой величины, при которой она как минимум была на порядок больше периода
повторения запросных сигналов РЛС. Усреднение достигается, как отмечалось, благодаря выбору постоянной времени нагрузки пикового детектора 20 такой величины, при которой она как минимум была на порядок больше периода  повторения запросных импульсов РЛС. Выходное напряжение пикового детектора 20, поступающее (см. фиг.2) на затвор полевого транзистора 16, вызывает соответствующее увеличение тока через его канал и увеличение падения напряжения на третьем резисторе 13. При этом происходит смещение рабочей точки на базе второго 15 биполярного транзистора таким образом, что в соответствие с принципом действия дифференциального каскада (см. стр. 368-377, [35]) ток через эмиттер и коллектор второго 15 биполярного транзистора возрастает, а через эмиттер и коллектор первого 14 биполярного транзистора уменьшается. Это уменьшение тока передается через вывод 2 устройства 10 управления в цепь управления управляемого аттенюатора 2, где вызывает увеличение сопротивления pin-диодов и, соответственно, рост потерь проходящих через аттенюатор 2 радиосигналов СВЧ, что стабилизирует уровень воздействующих на СВЧ-генератор 3 радиосигналов запроса при их изменении на входе антенны 1 в процессе изменения расстояния до АРЗ.
повторения запросных импульсов РЛС. Выходное напряжение пикового детектора 20, поступающее (см. фиг.2) на затвор полевого транзистора 16, вызывает соответствующее увеличение тока через его канал и увеличение падения напряжения на третьем резисторе 13. При этом происходит смещение рабочей точки на базе второго 15 биполярного транзистора таким образом, что в соответствие с принципом действия дифференциального каскада (см. стр. 368-377, [35]) ток через эмиттер и коллектор второго 15 биполярного транзистора возрастает, а через эмиттер и коллектор первого 14 биполярного транзистора уменьшается. Это уменьшение тока передается через вывод 2 устройства 10 управления в цепь управления управляемого аттенюатора 2, где вызывает увеличение сопротивления pin-диодов и, соответственно, рост потерь проходящих через аттенюатор 2 радиосигналов СВЧ, что стабилизирует уровень воздействующих на СВЧ-генератор 3 радиосигналов запроса при их изменении на входе антенны 1 в процессе изменения расстояния до АРЗ.
На интервале времени  , когда производится формирование в излучении СВЧ-генератора 3 ответной паузы, на вывод 1 устройства 10 управления от формирователя 9 импульсов ответной паузы поступает импульс, который через канал управляемой проводимости третьего 19 электронного коммутатора, находящегося в состоянии «замкнуто», подается на управляющий вход первого 17 электронного коммутатора. При этом канал управляемой проводимости первого 17 электронного коммутатора переходит в режим высокой проводимости и тем самым закорачивает на общую шину 24 выход управляемого источника тока (коллектор первого 14 биполярного транзистора), а также вывод 2 устройства 10 управления. В этом случае прохождение тока через pin-диоды управляемого аттенюатора 2 прекращается, что обеспечивает внесение большого затухания в прохождение мощности радиосигналов СВЧ. При этом прохождение колебаний СВЧ-генератора 3 в антенну 1 на время действия импульса формирователя 9 ответной паузы прекращается. Таким образом в ответном сигнале ААПП формируется так называемая ответная пауза.
, когда производится формирование в излучении СВЧ-генератора 3 ответной паузы, на вывод 1 устройства 10 управления от формирователя 9 импульсов ответной паузы поступает импульс, который через канал управляемой проводимости третьего 19 электронного коммутатора, находящегося в состоянии «замкнуто», подается на управляющий вход первого 17 электронного коммутатора. При этом канал управляемой проводимости первого 17 электронного коммутатора переходит в режим высокой проводимости и тем самым закорачивает на общую шину 24 выход управляемого источника тока (коллектор первого 14 биполярного транзистора), а также вывод 2 устройства 10 управления. В этом случае прохождение тока через pin-диоды управляемого аттенюатора 2 прекращается, что обеспечивает внесение большого затухания в прохождение мощности радиосигналов СВЧ. При этом прохождение колебаний СВЧ-генератора 3 в антенну 1 на время действия импульса формирователя 9 ответной паузы прекращается. Таким образом в ответном сигнале ААПП формируется так называемая ответная пауза.
В соответствии с заложенным в работу РЛС принципом действия (см. стр. 74-87, [5]) по временному положению принятой радиоприемным устройством РЛС ответной паузы относительно момента посылки запросного радиоимпульса измеряется наклонная дальность до АРЗ, необходимая наряду с угловыми координатами нахождения АРЗ для определения его текущих координат. При этом вносимая предлагаемым устройством временная задержка, связанная с приемом, обработкой и формированием ответной паузы, легко учитывается при калибровке РЛС.
После завершения импульса ответной паузы происходит запуск формирователя 21 импульсов блокировки помех. Длительность  импульсов блокировки помех рассчитывается по следующей формуле:
импульсов блокировки помех рассчитывается по следующей формуле:

где
 - длительность импульса блокировки помех;
- длительность импульса блокировки помех;
 - длительность периода повторения запросных сигналов РЛС;
- длительность периода повторения запросных сигналов РЛС;
 - длительность запросных сигналов РЛС;
- длительность запросных сигналов РЛС;
 - длительность импульсов ответной паузы.
- длительность импульсов ответной паузы.
Выходной импульс положительной полярности этого формирователя 21 поступает на вход управления второго 18 электронного коммутатора, переводя его канал управляемой проводимости в режим «замкнуто», а импульс отрицательной полярности поступает на вход управления третьего 19 электронного коммутатора, переводя его канал управляемой проводимости в режим «разомкнуто». При этом разрыв цепи управления первым 17 электронным коммутатором предотвращает прохождение ложных импульсов ответной паузы, возникающих от действия хаотических помех, на управляющий вход первого 17 электронного коммутатора и, соответственно, исключает формирование в СВЧ-излучении ААПП ложных ответных пауз.
В это же время канал управляемой проводимости второго 18 электронного коммутатора, который перешел в режим «замкнуто», закорачивает третий 13 резистор, что вызывает перевод управляемого источника тока в режим номинального тока I2(ном). При таком токе, как отмечалось, сигналы СВЧ проходят через управляемый аттенюатор 2 с малыми потерями. Это обеспечивает передачу наибольшей мощности колебаний от СВЧ-генератора 3 в антенну 1, что необходимо для сохранения энергетического потенциала канала радиотелеметрии независимо от уровня сигналов запроса.
Принцип действия ААПП при выполнении управляемого аттенюатора 2 на полевых транзисторах аналогичен описанному выше. Отличие состоит лишь в том, что выходной ток устройства 10 управления преобразуется на сопротивлении резистора 25 в выходное напряжение, которое с вывода 2 устройства 10 управления поступает на управляющий вход управляемого аттенюатора 2, выполненного на полевых транзисторах.
Система с обратной связью, состоящая из последовательно соединенных СВЧ-генератора 3, устройства 4 регистрации, полосового усилителя 5, детектора 6 радиоимпульсов, а также (в составе устройства 10 управления) пикового детектора 20, управляемого источника тока, выполненного на основе первого 14 и второго 15 биполярных транзисторов и полевом транзисторе 16, и управляемого аттенюатора 2, по принципу действия подобна системе автоматической регулировки усиления (АРУ) приемников импульсных сигналов (см. стр. 241-242, рис. 6.8 [29]), которая предназначена обычно для расширения динамического диапазона приемного устройства. Однако в предлагаемом устройстве благодаря применению этой системы обратной связи удалось не только расширить динамический диапазон АПП как приемника, но и расширить диапазон нормальной работы системы радиозондирования в область малых расстояний от РЛС до АРЗ. Как отмечалось выше, вблизи от РЛС, где обычно производится рабочий пуск АРЗ и начинается работа АПП на прием и передачу, из-за высокого уровня запросного сигнала АПП прототипа функционирует неустойчиво.
Формирование ответной паузы с помощью управляемого аттенюатора 2 обеспечивает дополнительные преимущества ААПП перед прототипом, у которого ответная пауза формируется путем кратковременного отключения СВЧ-генератора от источника питания. Процесс установления амплитуды и частоты колебаний СВЧ-генератора после включения питания может сопровождаться значительными выбросами амплитуды, паразитными колебаниями и выбегом частоты генерации (см. стр. 242-245, рис. 6.4, [38]), которые создают проблему устойчивости отслеживания частоты АПП системой АПЧ РЛС, а также расширяют спектр сигнала и уровень побочного излучения. СВЧ-генератор 3 предлагаемого ААПП работает в режиме непрерывных стационарных колебаний, его нагрузкой является управляемый аттенюатор 2, который обеспечивает согласование во всем диапазоне изменения затухания и диапазоне рабочих частот. Поэтому спектр излучения предлагаемого устройства получается практически монохроматическим и тем самым излучение ААПП создает меньше помех работе других радиотехнических систем.
Полосовой усилитель 5, компаратор 7 с гистерезисом и временной селектор 8 импульсов производят отбор принятых запросных радиоимпульсов соответственно по их частоте, амплитуде и длительности. Формирование импульса блокировки помех, действующего на интервале времени от момента завершения ответной паузы до ожидаемого прихода запросного импульса РЛС, обеспечивает на временном интервале между посылками радиоимпульсов запроса дополнительную защиту системы радиозондирования от воздействия на АРЗ хаотических импульсных радиопомех.
Представленное описание предлагаемого ААПП приведено на примере выполнения блоков и узлов на полупроводниковых приборах и интегральных схемах. Учитывая широкую потребность АРЗ на сети метеорологического зондирования атмосферы предлагаемый ААПП может быть реализован в интегральном исполнении с цифровой обработкой и формированием сигналов при сохранении его отличительных признаков. При этом конструкция ААПП также, как аналогов и прототипа, будет отличаться незначительной потреблением энергии бортового питания и не приведет к увеличению габаритов и массы АРЗ.
Таким образом, предлагаемый ААПП системы радиозондирования атмосферы при сохранении функциональных возможностей прототипа обеспечивает достижение технического результата изобретения - повышение устойчивости режима и надежности работы СВЧ-генератора в широком диапазоне расстояний, от места пуска АРЗ до его предела по дальности, ограниченного энергетическим потенциалом ААПП и рельефом местности, а также улучшение защищенности устройства от действия хаотических импульсных помех. При этом необходимо добавить, что использование предлагаемого ААПП в составе существующих систем радиозондирования потребует лишь несущественных конструктивных изменений в РЛС, связанных с введением частотного детектора в канал приема телеметрического сигнала, и перестройки частоты запросного передатчика на величину разностной частоты ωб биений. Результаты теоретических исследований ААПП получили подтверждение экспериментальными данными, полученными для макета приемопередатчика, выполненного на основе транзисторного генератора на частоту 1780 МГц [39].
ЛИТЕРАТУРА
1. Смирнов Г.Д., Горбачев В.П. Радиолокационные системы с активным ответом. - М.: Воениздат, 1962. 116 с.
2. Хахалин B.C. Современные радиозонды. - М.: Госэнергоиздат, 1959. 65 с.
3. Авт.свидетельство СССР SU 115078, опубл. 01.01.1958. Передатчик-ответчик для радиозонда / B.C. Хахалин, Б.В. Васильев, С.Ф. Калачинский.
4. Иванов В.Э., Гусев А.В., Игнатков К.А. и др. Современное состояние и перспективы развития систем радиозондирования атмосферы в России // Успехи современной радиоэлектроники. 2015. №9. С.3-49.
5. Иванов В.Э., Фридзон М.Б., Ессяк С.П. Радиозондирование атмосферы. Технические и метрологические аспекты разработки и применения радиозондовых измерительных средств, под ред. В.Э. Иванова. Екатеринбург. УрО РАН. 2004. 596 с.
6. Кудинов С.И., Гусев А.В., Иванов В.Э. Исследование методов совмещения частот приема и передачи в транзисторных сверхрегенеративных приемопередатчиках радиозондов // 23-я Международная Крымская конференция «СВЧ-техника и телекоммуникационные технологии» (КрыМиКо'2015). Севастополь, 2013. С.1026-1027.
7. Белкин М.К., Кравченко Г.И., Скоробутов Ю.Г., Стрюков Б.А. Сверхрегенераторы. - М.: Радио и связь, 1983, 248 с.
8. Кудинов С.И., Иванов В.Э. Исследование влияния флуктуационных и ударных колебаний на чувствительность сверхрегенеративных приемопередающих устройств // Ural Radio Engineering Journal. 2019. Т. 3. №2. С.170-194
9. Патент РФ RU 2624993 С1, опубл. 11.07.2017, Бюл. №20. Заявка №2016121285 от 30.05.2016. МКИ (2006.01) G01S13/74. Автодинный приемопередатчик системы радиозондирования атмосферы / В.Я. Носков, В.Э. Иванов, К.А. Игнатков, С.И. Кудинов, А.В. Гусев.
10. Демьянченко А.Г. Синхронизация генераторов гармонических колебаний. - М.: Энергия, 1976. - 240 с.
11. Минаев М.И. Низкочастотный спектр автодинного преобразователя частоты // Электронная техника. Сер. Электроника СВЧ. 1989. №. 7. С.12-14.
12. Курокава К. Принудительная синхронизация твердотельных СВЧ-генераторов//ТИИЭР, 1973, т.61, №10, стр. 12-40.
13. Защита от радиопомех / Под ред. М.В. Максимова. - М.: Советское радио, 1976. - 496 с.
14. Куприянов А.И., Сахаров А.В. Теоретические основы радиоэлектронной борьбы. - М.: Вузовская книга, 2007. - 356 с.
15. Сколник М. Введение в технику радиолокационных систем. -М.: Мир, 1965,747 с.
16. Радиолокационные устройства (теория и принципы построения) / Под ред. В.В. Григорина-Рябова. - М.: Сов. радио, 1970, 680 с.
17. Справочник по радиолокации. Под ред. М. Сколника. Нью-Йорк, 1970: Пер. с англ. Том 3. Радиолокационные устройства и системы / Под ред. А.С Виницкого. - М.: Сов. радио, 1978. - 528 с.
18. Финкельштейн М. И. Основы радиолокации: Учебник для вузов. - М.: Радио и связь, 1983. - 536 с.
19. Давыдов П.С, Сосновский А.А., Хаймович И.А. Авиационная радиолокация: Справочник. - М.: Транспорт, 1984. - 223 с.
20. Авиационные радиолокационные комплексы и системы / П.И. Дудник, Г.С Кондратенков, Б.Г. Татарский и др. Под ред. П.И. Дудника. - М: Изд. ВВИА им. проф. Н.Е. Жуковского, 2006. - 1112 с.
21. Радиоэлектронная авионика / Э.А. Болелов, И.Б. Губерман, А.Т. Кудинов, С.Б. Стукалов. - М.: ИД Академии Жуковского, 2020. - 80 с.
22. Антенны и устройства СВЧ. Расчет и проектирование антенных решеток и их излучающих элементов. / Под ред. Д.И. Воскресенского. - М.: Радио и связь, 1972, 320 с.
23. Кочемасов В.Н, Белов Л.А. Аттенюаторы с электронным управлением - производители и характеристики // Электроника: наука, технология, бизнес.2017. №4. С.82-95.
24. Балыко А.К., Ольчев Б.М., Тощов А.А. Схемотехническое проектирование электрически управляемого широкополосного транзисторного аттенюатора // Электронная техника. Сер. 1. СВЧ-техника. 1997. №1.С.15-19.
25. Малышев В.А. Бортовые активные устройства сверхвысоких частот.- Л.: Судостроение, 1990, 264 с.
26. Царапкин Д.П. Генераторы СВЧ на диодах Ганна. - М.: Радио и связь, 1982, 112 с.
27. Носков В.Я., Смольский С.М., Игнатков К.А., Мишин Д.Я., Чупахин А.П. Современные гибридно-интегральные автодинные генераторы микроволнового и миллиметрового диапазонов и их применение. Часть 11. Основы реализации автодинов // Успехи современной радиоэлектроники. 2019. №2. С.5-33.
28. Костылев С.А., Гончаров В.В., Соколовский И.И., Челядин А.В. Полупроводники с объемной отрицательной проводимостью в СВЧ полях: Электронные процессы и функциональные возможности. - Киев: Наук, думка, 1987.-144 с.
29. Радиоприемные устройства / Под ред. Н.Н. Фомина. М.: Радио и связь, 2003.-520 с.
30. Коломбет Е.А. Микроэлектронные средства обработки аналоговых сигналов. - М.: Радио и связь, 1991. - 376 с.
31. Щербаков В.И., Грездов Г.И. Электронные схемы на операционных усилителях: Справочник. - К.: Техника, 1983. - 213 с.
32. Ерофеев Ю.Н. Импульсные устройства - М.: Высшая школа, 1989-589 с.
33. Шило В.Л. Популярные цифровые микросхемы: Справочник. - М.: Металлургия, 1988. - 321 с.
34. СВЧ устройства на полупроводниковых приборах. Проектирование и расчет / Под ред. И.В. Мальского, Б.В. Сестрорецкого. -М.: Советское радио, 1969. - 580 с.
35. Титце У., Шенк К. Полупроводниковая схемотехника. Том 1. -М.: ДМК Пресс, 2008. - 832 с.
36. Фролкин В.Т., Попов Л.Н. Импульсные устройства. М.: Советское радио, 1980. - 368 с.
37. Полупроводниковые приборы. Сверхвысокочастотные диоды. Справочник / Под ред. Б.А. Наливайко. - Томск: МГП Раско, 1992. - 223 с.
38. Каганов В.И. Транзисторные радиопередатчики. - М.: Энергия, 1976.-448 с.
39. Носков В.Я., Иванов В.Э., Гусев А.В. и др. Применение автодинов в перспективных системах радиолокационного зондирования атмосферы // Ural Radio Engineering Journal. 2022. Т. 6. №1. С.11-53.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТАБИЛИЗАЦИИ УРОВНЯ СИГНАЛА НА ВХОДЕ АВТОДИННОГО АСИНХРОННОГО ПРИЕМОПЕРЕДАТЧИКА СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2023 |
|
RU2808230C1 |
| СПОСОБ И УСТРОЙСТВО СИНХРОННОГО ПРИЕМА И ОБРАБОТКИ ЗАПРОСНОГО СИГНАЛА В АВТОДИННОМ ПРИЕМОПЕРЕДАТЧИКЕ СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2786729C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА | 2023 |
|
RU2801741C1 |
| СПОСОБ СИНХРОННОГО ПРИЕМА И ОБРАБОТКИ ЗАПРОСНОГО СИГНАЛА В АВТОДИННОМ ПРИЕМОПЕРЕДАТЧИКЕ СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2789416C1 |
| СПОСОБ ДОПЛЕРОВСКОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2808775C1 |
| СПОСОБ ПЕРЕДАЧИ КОМАНД УПРАВЛЕНИЯ НА БОРТ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2804516C1 |
| АЭРОЛОГИЧЕСКИЙ РАДИОЗОНД С ГОМОДИННЫМ ПРИЕМОПЕРЕДАТЧИКОМ СИСТЕМЫ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2024 |
|
RU2829602C1 |
| АВТОДИННЫЙ ПРИЁМОПЕРЕДАТЧИК СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2016 |
|
RU2624993C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА | 2004 |
|
RU2304290C2 |
| СПОСОБ РЕГУЛИРОВКИ ВЫХОДНЫХ ПАРАМЕТРОВ СВЕРХРЕГЕНЕРАТИВНОГО ПРИЕМОПЕРЕДАТЧИКА РАДИОЗОНДА | 2011 |
|
RU2470323C1 |

Изобретение относится к радиолокации с активным ответом и может быть использовано в аэрологических радиозондах (АРЗ) систем радиозондирования атмосферы для измерения наклонной дальности до радиозонда импульсным методом, пеленгации по угловым координатам и передачи телеметрической информации на одной несущей частоте. Техническим результатом изобретения является расширение диапазона рабочих дальностей действия системы радиозондирования в область малых расстояний, расширение динамического диапазона асинхронного приемопередатчика (АПП) по уровню сигнала запроса и повышение устойчивости АПП к воздействию активных помех в виде хаотической последовательности радиоимпульсов. Автодинный асинхронный приемопередатчик системы радиозондирования атмосферы содержит антенну, управляемый аттенюатор, устройство управления и последовательно соединенные управляемый аттенюатор, СВЧ-генератор с возможностью электрического управления частотой и его включением, устройство регистрации автодинного сигнала, полосовой усилитель, детектор радиоимпульсов, компаратор с гистерезисом, временной селектор импульсов и формирователь импульсов ответной паузы. Управляемый аттенюатор высокочастотными портами включен между антенной и СВЧ-генератором. Выход формирователя ответной паузы подключен к первому выводу устройства управления. Второй вывод формирователя ответной паузы подключен к управляющему входу управляемого аттенюатора, а к третьему выводу подключен выход детектора радиоимпульсов. 5 з.п. ф-лы, 2 ил.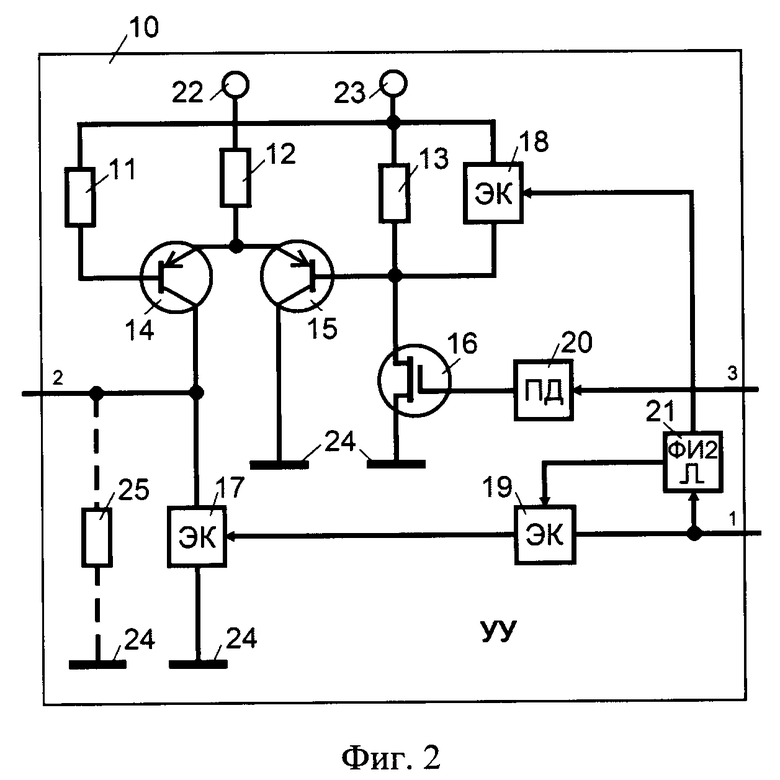
1. Автодинный асинхронный приемопередатчик системы радиозондирования атмосферы, содержащий антенну и последовательно соединенные СВЧ-генератор с возможностью электрического управления частотой и его включением, устройство регистрации автодинного сигнала, полосовой усилитель, детектор радиоимпульсов, компаратор с гистерезисом, временной селектор импульсов и формирователь импульсов ответной паузы, отличающийся тем, что в него дополнительно введены управляемый аттенюатор и устройство управления, причем управляемый аттенюатор высокочастотными портами включен между антенной и СВЧ-генератором, выход формирователя ответной паузы подключен к первому выводу устройства управления, а его второй вывод подключен к управляющему входу управляемого аттенюатора, а к третьему выводу подключен выход детектора радиоимпульсов.
2. Автодинный асинхронный приемопередатчик по п. 1, отличающийся тем, что управляемый аттенюатор выполнен на основе pin-диодов.
3. Автодинный асинхронный приемопередатчик по п. 1, отличающийся тем, что управляемый аттенюатор выполнен на основе полевых транзисторов.
4. Автодинный асинхронный приемопередатчик по пп. 1 и 2, отличающийся тем, что устройство управления содержит первый, второй и третий резисторы, первый и второй биполярные транзисторы, полевой транзистор, первый, второй и третий электронные коммутаторы, пиковый детектор, формирователь импульсов блокировки помех, клеммы подключения источников питания и смещения, общую шину питания, а также первый, второй и третий выводы устройства управления, при этом базы первого и второго биполярных транзисторов подключены через первый и третий резисторы к клемме источника смещения, эмиттеры этих транзисторов соединены вместе и подключены через второй резистор к клемме источника питания, коллектор второго биполярного транзистора соединен с общей шиной, а к его базе дополнительно подключен сток полевого транзистора, исток которого соединен с общей шиной, канал управляемой проводимости второго электронного коммутатора подключен параллельно третьему резистору, первый вывод устройства управления подключен к входу запуска формирователя импульсов блокировки помех, первый выход которого подключен к управляющему входу второго электронного коммутатора, канал управляемой проводимости первого электронного коммутатора подключен между общей шиной и вторым выводом устройства управления, с которым соединен также коллектор первого биполярного транзистора, первый вывод устройства управления дополнительно связан с управляющим входом первого электронного коммутатора через канал управляемой проводимости третьего электронного коммутатора, управляющий вход которого подключен ко второму выходу формирователя импульсов блокировки помех, при этом третий вывод устройства управления связан с затвором полевого транзистора через пиковый детектор.
5. Автодинный асинхронный приемопередатчик по пп. 1 и 3, отличающийся тем, что устройство управления содержит первый, второй, третий и четвертый резисторы, первый и второй биполярные транзисторы, полевой транзистор, первый, второй и третий электронные коммутаторы, пиковый детектор, формирователь импульсов блокировки помех, клеммы подключения источников питания и смещения, общую шину питания, а также первый, второй и третий выводы устройства управления, при этом базы первого и второго биполярных транзисторов подключены через первый и третий резисторы к клемме источника смещения, эмиттеры этих транзисторов соединены вместе и подключены через второй резистор к клемме источника питания, коллектор первого биполярного транзистора соединен со вторым выводом устройства управления и первым выводом четвертого резистора, второй вывод которого подключен к общей шине, коллектор второго биполярного транзистора соединен с общей шиной, а к его базе дополнительно подключен сток полевого транзистора, исток которого соединен с общей шиной, канал управляемой проводимости первого электронного коммутатора подключен параллельно четвертому резистору, а канал управляемой проводимости второго электронного коммутатора подключен параллельно третьему резистору, первый вывод устройства управления подключен к входу запуска формирователя импульсов блокировки помех, первый выход которого подключен к управляющему входу второго электронного коммутатора, канал управляемой проводимости первого электронного коммутатора подключен параллельно четвертому резистору, первый вывод устройства управления дополнительно связан с управляющим входом первого электронного коммутатора через канал управляемой проводимости третьего электронного коммутатора, управляющий вход которого подключен ко второму выходу формирователя импульсов блокировки помех, при этом третий вывод устройства управления связан с затвором полевого транзистора через пиковый детектор.
6. Автодинный асинхронный приемопередатчик по п. 1, отличающийся тем, что частота СВЧ генератора отстоит от частоты принимаемых радиоимпульсов запроса на величину не менее половины полосы синхронизации.
| АВТОДИННЫЙ ПРИЁМОПЕРЕДАТЧИК СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2016 |
|
RU2624993C1 |
| МНОГОРЕЖИМНЫЙ АЭРОЛОГИЧЕСКИЙ КОМПЛЕКС | 2019 |
|
RU2710965C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2014 |
|
RU2571870C1 |
| ПРИЕМОПЕРЕДАЮЩЕЕ УСТРОЙСТВО | 2015 |
|
RU2599946C1 |
| US 10317518 B2, 11.06.2019 | |||
| WO 9857456 A1, 17.12.1998 | |||
| WO 9616342 A1, 30.05.1996. | |||

