Изобретение относится к авиации, а именно к системам управления полетом летательных аппаратов, использующих для управления по крену элероны или флаппероны и для управления по рысканию цельноповоротные кили.
Известен способ расширения диапазона углов атаки с обеспечением поперечной статической и динамической устойчивости летательного аппарата по углу скольжения при сохранении подъемной силы с помощью генератора вихрей, установленных по передней кромке наплыва крыла [1].
Известен способ управления путевой устойчивостью летательного аппарата в полете автоматом стабилизации с помощью руля направления.
Недостатком такого способа является то, что он применим только для нецельноповортных килей вертикального оперения, имеющих рули направления [2].
Широко известны аэродинамические элементы летательных аппаратов, предназначенные для изменения их аэродинамических характеристик и управления положением в воздухе.
Целью данного изобретения является обеспечение управления путевой и поперечной статической устойчивостью летательного аппарата в зависимости от числа Маха и угла атаки с помощью дополнительных управляющих поверхностей (ДУП).
Сущность изобретения заключается в том, что в способе управления устойчивостью летательного аппарата в полете, основанном на использовании аэродинамических поверхностей, а именно левой и правой консолей крыла и цельноповоротных килей вертикального оперения, воздействуют на путевую и поперечную статическую устойчивость летательного аппарата, изменяя характеристики путевой и поперечной устойчивости с помощью дополнительных управляющих поверхностей, расположенных на левой и правой консолях крыла и на цельноповоротных килях вертикального оперения летательного аппарата, при этом при отклонении дополнительных управляющих поверхностей каждой консоли крыла и цельноповоротного киля вертикального оперения летательного аппарата изменяется обтекание, приводящее к уменьшению или увеличению показателей путевой  и поперечной
и поперечной  статической устойчивости.
статической устойчивости.
Предлагаемый способ осуществляется в устройстве для управления устойчивостью летательного аппарата в полете, содержащем отклоняемые управляющие поверхности в виде флаперонов или элеронов и цельноповоротных килей и дополнительные управляющие поверхности, расположенные на внутренних сторонах левого и правого килей, а также расположенные на верхних поверхностях левой и правой консолях крыла летательного аппарата.
Расположения и возможное отклонение дополнительных управляющих поверхностей (ДУП) на ЛА показано на фиг.1, на фиг.2 показана блок-схема устройства, на фиг.3, 4 показана схема отклонения ДУП для управления устойчивостью летательного аппарата в полете.
Устройство для управления устойчивостью летательного аппарата в полете (фиг.1) в зависимости от числа Маха и угла атаки содержит отклоняемые с помощью гидроцилиндров 9 управляющие поверхности 1 и 4, расположенные на внешних сторонах 2, 3 и на внутренних сторонах 5, 6 левого и правого килей, и дополнительные управляющие поверхности 7 и 8, расположенные на верхних поверхностях левой и правой консолей крыла летательного аппарата, отклоняемые с помощью гидроцилиндров 10. Кроме того, устройство (фиг.2) содержит датчики 11, 12, 13, 14, учитывающие следующие параметры: 11 - число Маха (М), 12 - угол скольжения (β), 13 - угол атаки (α), 14 - атмосферное давление на высоте. В устройство входит блок автоматики 15, электромагнитные клапаны 16 и 17, управляющие подачей гидрожидкости в гидроцилиндры 9 и 10 и осуществляющие соответственно отклонение дополнительных управляющих поверхностей 1, 2, 3, 4 на цельноповоротных килях 5, 6 вертикального оперения и дополнительных управляющих поверхностей 7 и 8 на правой и левой плоскостях крыла летательного аппарата.
В процессе полета ЛА во всем диапазоне чисел Маха и углов атаки его аэродинамическая компоновка не всегда в достаточной степени обеспечивает путевую  и поперечную
и поперечную  статическую устойчивость.
статическую устойчивость.
Управление боковой статической и динамической устойчивостью в зависимости от числа Маха и угла атаки осуществляется путем отклонения вышеуказанных ДУП согласно программе, находящейся в блоке автоматики. В программе заложено оптимальное значение следующих характеристик:
- производных, характеризующих путевую  и поперечную статическую устойчивость
и поперечную статическую устойчивость  всего ЛА в зависимости от числа Маха и угла атаки;
всего ЛА в зависимости от числа Маха и угла атаки;
- значения ∂ в зависимости от высоты и М полета.
С целью обеспечения оптимального значения  всего ЛА при скольжении на любую плоскость летательного аппарата значения числа Маха, углов скольжения и атаки от датчиков 11, 12, 13 поступают на блок автоматики 15, по команде которого с помощью электрогидрокранов 17 и гидроцилиндров 9 производят отклонение поверхностей, расположенных на левом 5 и правом киле 6 вертикального оперения.
всего ЛА при скольжении на любую плоскость летательного аппарата значения числа Маха, углов скольжения и атаки от датчиков 11, 12, 13 поступают на блок автоматики 15, по команде которого с помощью электрогидрокранов 17 и гидроцилиндров 9 производят отклонение поверхностей, расположенных на левом 5 и правом киле 6 вертикального оперения.
При скольжении на правую плоскость с целью увеличения путевой статической устойчивости отклоняют поверхности 2 и 4, а для ее уменьшения - поверхности - 1 и 3.
Влияние отклонения управляющих поверхностей на путевую статическую устойчивость характеризуется величиной  При отклонении ДУП путевая статическая устойчивость всего летательного аппарата
При отклонении ДУП путевая статическая устойчивость всего летательного аппарата  будет определяться суммой производной, характеризующей путевую устойчивость летательного аппарата
будет определяться суммой производной, характеризующей путевую устойчивость летательного аппарата  при неотклоненных управляющих поверхностях и производной
при неотклоненных управляющих поверхностях и производной  характеризующей влияние отклонения управляющих поверхностей на путевую устойчивость летательного аппарата:
характеризующей влияние отклонения управляющих поверхностей на путевую устойчивость летательного аппарата:

Знак «+» имеет место в том случае, когда отклонение управляющих поверхностей (фиг.3) направлено на увеличение путевой статической устойчивости, а знак «-» - при ее уменьшении (фиг.4).
Отклонение дополнительно управляющих поверхностей 1 и 3, 2 и 4 приводит к тому, что при их отклонении, вызывающем изменение  одновременно увеличивается или уменьшается величина
одновременно увеличивается или уменьшается величина  характеризующая оптимальное значение поперечной боковой статической устойчивости летательного аппарата. При необходимости с целью сохранения ее прежнего значения (устранения влияния управляющих поверхностей, расположенных на вертикальном оперении) происходит отклонение дополнительных управляющих поверхностей 7 и 8. Влияние отклонения данных управляющих поверхностей на поперечную статическую устойчивость характеризуется величиной производной
характеризующая оптимальное значение поперечной боковой статической устойчивости летательного аппарата. При необходимости с целью сохранения ее прежнего значения (устранения влияния управляющих поверхностей, расположенных на вертикальном оперении) происходит отклонение дополнительных управляющих поверхностей 7 и 8. Влияние отклонения данных управляющих поверхностей на поперечную статическую устойчивость характеризуется величиной производной  По аналогии с (1) величина
По аналогии с (1) величина  будет определяться как сумма производной
будет определяться как сумма производной  характеризующей поперечную статическую устойчивость ЛА при неотклоненных дополнительно управляющих поверхностях и
характеризующей поперечную статическую устойчивость ЛА при неотклоненных дополнительно управляющих поверхностях и  учитывающей влияние отклонения ДУП 7 и 8 на поперечную статическую устойчивость летательного аппарата:
учитывающей влияние отклонения ДУП 7 и 8 на поперечную статическую устойчивость летательного аппарата:

Для обеспечения оптимального значения  при неизменном значении
при неизменном значении  в зависимости от углов β и α, а также числа Маха (по алгоритму, описанному ранее) при скольжении на любую плоскость раздельно отклоняются управляющие поверхности 7 и 8. При необходимости уменьшения
в зависимости от углов β и α, а также числа Маха (по алгоритму, описанному ранее) при скольжении на любую плоскость раздельно отклоняются управляющие поверхности 7 и 8. При необходимости уменьшения  с целью достижения ее оптимального значения отклоняется управляющая поверхность, расположенная на плоскости, на которую осуществляется скольжение. Влияние ее отклонения учитывается через производную
с целью достижения ее оптимального значения отклоняется управляющая поверхность, расположенная на плоскости, на которую осуществляется скольжение. Влияние ее отклонения учитывается через производную  Для увеличения
Для увеличения  отклоняется дополнительно управляющая поверхность, расположенная на плоскости, на которую скольжение не осуществляется. Как отмечалось ранее, влияние отклонения данных ДУП на поперечную статическую устойчивость характеризуется величиной производной
отклоняется дополнительно управляющая поверхность, расположенная на плоскости, на которую скольжение не осуществляется. Как отмечалось ранее, влияние отклонения данных ДУП на поперечную статическую устойчивость характеризуется величиной производной  Поперечная статическая устойчивость всего летательного аппарата
Поперечная статическая устойчивость всего летательного аппарата  будет определяться согласно (2). В случае скольжения на правую плоскость и отклонения дополнительно управляющей поверхности 8 в выражении (2) будет знак «-» и знак «+» при скольжении на левую плоскость и отклонении дополнительно управляющей поверхности 7.
будет определяться согласно (2). В случае скольжения на правую плоскость и отклонения дополнительно управляющей поверхности 8 в выражении (2) будет знак «-» и знак «+» при скольжении на левую плоскость и отклонении дополнительно управляющей поверхности 7.
При необходимости одновременного обеспечения оптимального значения  и
и  происходит совместное отклонение управляющих поверхностей 1, 2, 3, 4, и 7, 8 (с учетом взаимовлияния) согласно алгоритму, изложенному ранее.
происходит совместное отклонение управляющих поверхностей 1, 2, 3, 4, и 7, 8 (с учетом взаимовлияния) согласно алгоритму, изложенному ранее.
Поскольку  то предлагаемый подход при неизменных значениях моментов инерции позволяет обеспечить ее оптимальную величину, а следовательно, и оптимальную реакцию самолета по крену на скольжение во всем диапазоне высот и чисел Маха в пределах нормируемой величины (æ=0.1…3.0).
то предлагаемый подход при неизменных значениях моментов инерции позволяет обеспечить ее оптимальную величину, а следовательно, и оптимальную реакцию самолета по крену на скольжение во всем диапазоне высот и чисел Маха в пределах нормируемой величины (æ=0.1…3.0).
Источники информации
1. Патент РФ на изобретение №1840518, кл. В64С 28/06, опубл. 20.05.2007, бюл. №14.
2. Динамика полета и боевого маневрирования летательных аппаратов. Учебное пособие. А.И.Нелюбов, А.А.Новод. - М.: ВВИА им. проф. Н.Е.Жуковского, 1992, С.364…366.
| название | год | авторы | номер документа |
|---|---|---|---|
| АЭРОДИНАМИЧЕСКАЯ ПОВЕРХНОСТЬ И ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2667410C1 |
| САМОЛЕТ ИНТЕГРАЛЬНОЙ АЭРОДИНАМИЧЕСКОЙ КОМПОНОВКИ | 2010 |
|
RU2440916C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2632550C1 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТА ПРИ ОТКАЗЕ ДВИГАТЕЛЯ | 2014 |
|
RU2562673C1 |
| СВЕРХЗВУКОВОЙ ПРЕОБРАЗУЕМЫЙ САМОЛЕТ С Х-ОБРАЗНЫМ КРЫЛОМ | 2015 |
|
RU2621762C1 |
| СВЕРХЗВУКОВОЙ ПРЕОБРАЗУЕМЫЙ МАЛОШУМНЫЙ САМОЛЕТ | 2015 |
|
RU2614438C1 |
| СВЕРХЗВУКОВОЙ КОНВЕРТИРУЕМЫЙ САМОЛЕТ С Х-ОБРАЗНЫМ КРЫЛОМ | 2016 |
|
RU2632782C1 |
| СВЕРХЗВУКОВОЙ КОНВЕРТИРУЕМЫЙ САМОЛЕТ | 2015 |
|
RU2605587C1 |
| СВЕРХЗВУКОВОЙ КОНВЕРТИРУЕМЫЙ САМОЛЕТ | 2009 |
|
RU2432299C2 |
| СКОРОСТНОЙ СИНХРОКОПТЕР-АМФИБИЯ | 2016 |
|
RU2645515C2 |
Изобретение относится к авиации, а именно к системам управления полетом летательных аппаратов, использующих для управления по крену элероны или флаппероны и для управления по рысканию цельноповоротные кили. Устройство содержит отклоняемые с помощью гидроцилиндров (9) управляющие поверхности (1, 4), расположенные на внешних сторонах (2, 3) и на внутренних сторонах (5, 6) левого и правого килей, и дополнительные управляющие поверхности (7, 8), расположенные на верхних поверхностях левой и правой консолей крыла летательного аппарата, отклоняемые с помощью гидроцилиндров (10). Устройство содержит датчики, учитывающие следующие параметры: число Маха (М), - угол скольжения (β), угол атаки (α), атмосферное давление на высоте. В устройство входят блок автоматики, электромагнитные клапаны, управляющие подачей гидрожидкости в гидроцилиндры. Достигается обеспечение управления путевой и поперечной статической устойчивостью летательного аппарата с помощью дополнительных управляющих поверхностей. 2 н.п. ф-лы, 4 ил.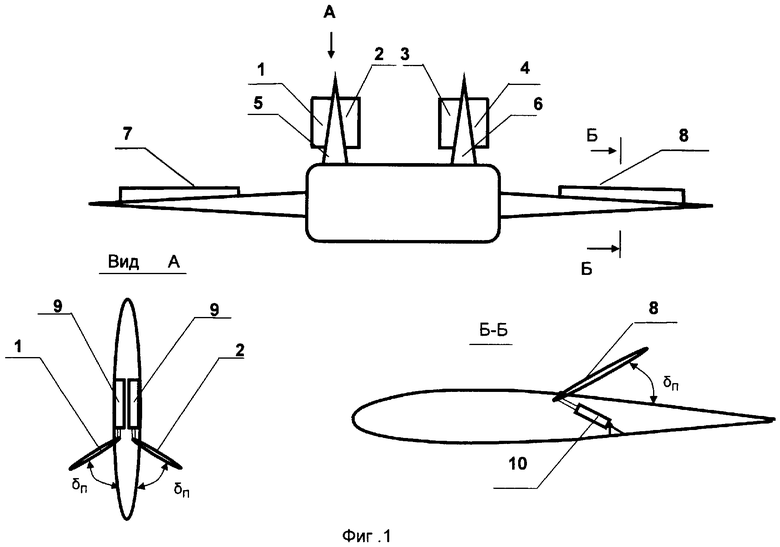
1. Способ управления устойчивостью летательного аппарата, основанный на использовании аэродинамических поверхностей, отличающийся тем, что воздействуют на путевую и поперечную статическую устойчивость летательного аппарата за счет отклонения дополнительных управляющих поверхностей, расположенных на левой и правой консолях крыла и на цельноповоротных килях вертикального оперения двухкилевого летательного аппарата, при этом изменяется их обтекание при отклонении дополнительных управляющих поверхностей каждой консоли крыла, левого и правого киля вертикального оперения летательного аппарата, изменяющее критерии путевой  и поперечной
и поперечной  устойчивости.
устойчивости.
2. Устройство для управления устойчивостью летательного аппарата, содержащее отклоняемые управляющие поверхности в виде флапперонов или элеронов и рулей направления, отличающееся тем, что содержит дополнительные управляющие поверхности, расположенные на внутренних сторонах левого и правого цельноповоротных килей, а также дополнительно управляющие поверхности, расположенные на верхних поверхностях левой и правой консолей крыла летательного аппарата.
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1981 |
|
SU1840518A1 |
| ВЕРТОЛЕТ С ОДНИМ НЕСУЩИМ ВИНТОМ И СПОСОБ КОМПЕНСАЦИИ РЕАКТИВНОГО МОМЕНТА НЕСУЩЕГО ВИНТА ОДНОВИНТОВОГО ВЕРТОЛЕТА | 1993 |
|
RU2086476C1 |
| US 3610557 A1, 05.10.1971 | |||
| СПОСОБ ТОРМОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ДВУХКИЛЕВЫМ ВЕРТИКАЛЬНЫМ ОПЕРЕНИЕМ (ВАРИАНТЫ) | 2004 |
|
RU2255023C1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1249702A1 |
| Устройство для автоматического парирования крена летательного аппарата | 1973 |
|
SU474209A1 |

