Изобретение относится к авиации, а именно к системам управления, повышающим безопасность полета летательных аппаратов, имеющих два и более двигателей, имеющих закрылки, использующих для управления по крену элероны, для управления по рысканию руль направления, а для управления по тангажу - стабилизатор.
Известен способ парирования отказа двигателя, заключающегося в отклонении летчиком рычагов управления, направленном на компенсацию отказа двигателя в прямолинейном горизонтальном полете [Динамика полета и боевого маневрирования летательных аппаратов. Учебник. A.M. Тарасенков, В.Г. Брага. - М.: ВВИА им. проф. Н.Е. Жуковского, 1984, с. 389…391].
Известен способ парирования отказа двигателя в прямолинейном горизонтальном полете с помощью автомата курса [Самолет ЯК-28П. Книга 3. Техническое описание. Самолетные системы, взлетно-посадочные устройства и управление. Ю.А. Бардин, М.Г. Бендерский и др. - М.: Машиностроение, 1965, с. 134…135].
Недостатком таких способов является то, что они применяются для парирования отказа двигателя только в прямолинейном горизонтальном полете. Кроме того, при данных способах эффективности рулевых поверхностей: элеронов, руля направления, способных при совершении маневра ЛА с увеличивающемся углом крена парировать отказ двигателя (работающего на максимальном или форсажном режиме), расположенного на той плоскости крыла, в сторону которой осуществляется крен, может быть недостаточно. Это может привести к дальнейшему увеличению угловой скорости ωx, превышению ее ограничения и как следствие потери устойчивости и управляемости летательного аппарата.
Технической задачей изобретения является повышение безопасности полета при отказе двигателя, работающего в момент отказа на максимальном или форсажном режиме и расположенного на той плоскости крыла, на которую у летательного аппарата имеется увеличивающийся угол крена.
Решение технической задачи заявленного изобретения состоит в том, что в способе парирование отказа двигателя (работающего в момент отказа на максимальном или форсажном режиме и расположенного на той плоскости крыла, на которую у летательного аппарата имеется увеличивающийся угол крена), основанное на использовании дополнительных управляемых поверхностей (ДУП), изменении кривизны профиля крыла за счет совместного отклонения элеронов и закрылков, уменьшении угла атаки при отклонении стабилизатора, руля направления, управляющее воздействие к которым осуществляется по команде заявленного устройства. Заявленное устройство распознает отказ двигателя и в зависимости от параметров полета и режима работы отказавшего двигателя осуществляет совместное отклонение вышеуказанных рулевых поверхностей для парирования его отказа.
Применение для парирования отказа двигателя дополнительных управляющих поверхностей, изменение кривизны профиля крыла за счет совместного отклонения элеронов и закрылков, стабилизатора, руля направления, отклоняемых по команде заявленного устройства является существенным отличительным признаком заявляемого изобретения.
Технический результат изобретения заключается в повышении безопасности полета и облегчении работы летчика путем парирования отказа двигателя совместным отклонением, с помощью заявленного устройства, дополнительно управляющих поверхностей, элеронов и закрылков, изменяющих кривизну профиля крыла, стабилизатора, руля направления.
Расположение и возможное отклонение дополнительных управляющих поверхностей, элеронов, закрылков, руля направления, стабилизатора показано на фиг. 1, на фиг. 2 показана блок схема устройства, отклонение элеронов, руля направления при совершении маневра летательного аппарата (ЛА) с увеличивающимся углом крена (с угловой скоростью 
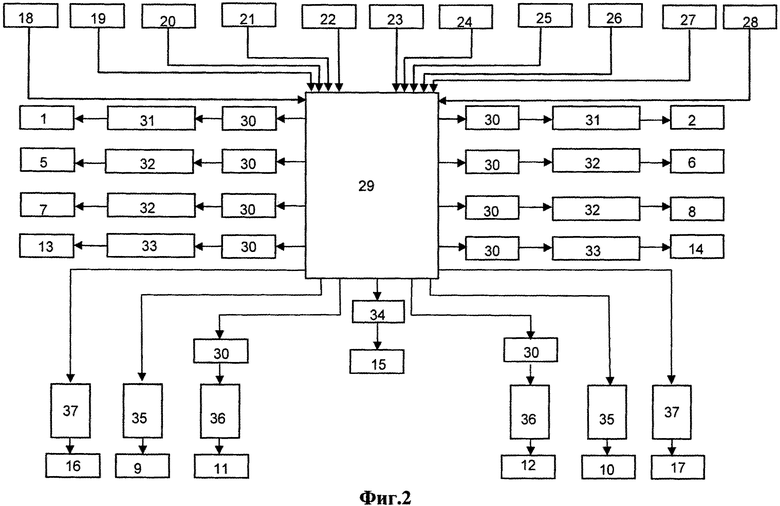
Устройство для повышения безопасности полета при отказе двигателя 3 или 4 в полете у летательного аппарата (фиг. 1) в зависимости от числа Маха и угла атаки содержит отклоняемые с помощью гидроцилиндров 29 (фиг. 2) дополнительные управляющие поверхности 1, 2, расположенные на верхней поверхности крыла, а также ДУП 5, 6, 7, 8, отклоняемых с помощью гидроцилиндров 30 и расположенных на верхней и нижней поверхностях крыла, и дополнительные отклоняемые поверхности 13, 14, расположенные на боковых поверхностях фюзеляжа. Кроме того, устройство (фиг. 2) содержит датчики 18, 19, 20, 21, 22, 23, 24, 25, 26, 27, 28, учитывающие следующие параметры 18 - число Маха (М), 19 - угол атаки (α), 20 - угол скольжения (β), 21 - угол крена (γ), 22 - атмосферное давление, 23 - датчик положения ручек управления двигателей (РУД), 24 - датчик оборотов левого двигателя, 25 - датчик оборотов правого двигателя, 26 - датчик положения ручки управления самолетом, 27 - датчик давления, установленный на гидронасосе левого двигателя, 28 - датчик давления ,установленный на гидронасосе правого двигателя.
В устройство входят блок-система автоматического управления (САУ) 29, электромагнитные клапаны 30, управляющие подачей гидрожидкости в гидроцилиндры 31, 32, 33, осуществляющие, соответственно, отклонение дополнительных управляющих поверхностей 1, 2, 5, 6, 7, 8 на правой и левой плоскостях крыла летательного аппарата и дополнительных управляющих поверхностей 13, 14 (фиг. 1) на правой и левой боковой поверхности фюзеляжа летательного аппарата и отклоняемые с помощью гидроцилиндров 33, кроме того, электромагнитные клапаны 30 осуществляют подачу гидрожидкости в гидроцилиндры 36 выпуска закрылков 11, 12, гидроусилители 34, 35, 37, управляющие, соответственно, рулем направления 15, элеронами 9, 10, левой 16 и правой 17 консолями стабилизатора.
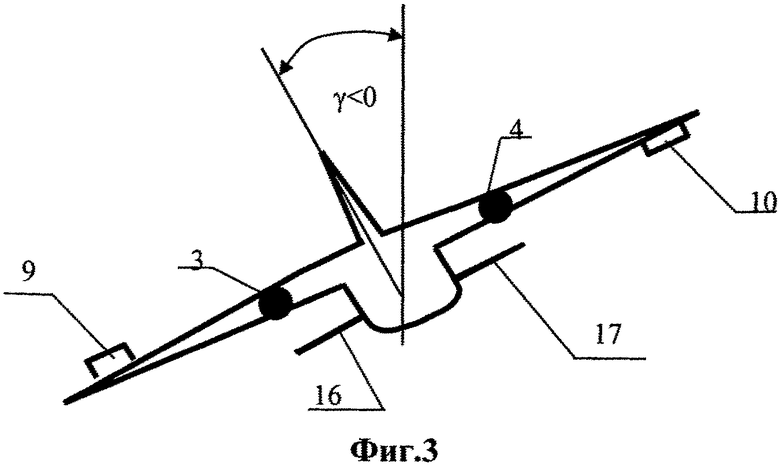
При отказе двигателя у ЛА, совершающего маневр с увеличивающимся углом крена на ту плоскость крыла, где расположен отказавший двигатель, вследствие действия момента от работающего двигателя My(P) возникает угол скольжения, приводящий к возникновению момента крена Mx(β) и рыскания My(β). Наибольшую опасность, с точки зрения безопасности полета, представляет момент Mx(β), способствующий дальнейшему увеличению уже имеющейся угловой скорости ωx.
Для устранения угла скольжения при отказе левого двигателя 3 у ЛА, выполняющего маневр при отклоненных элеронах 9, 10 с углом 

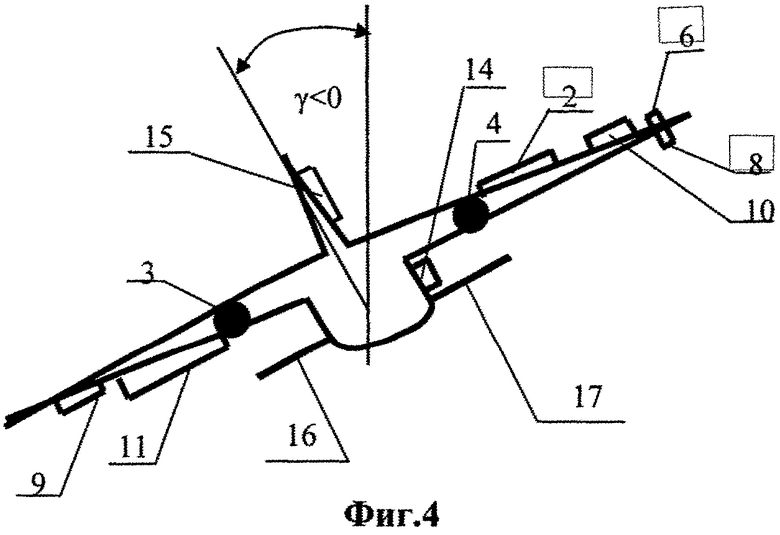
При наличии отказа левого двигателя 3, по команде блока 29 с помощью электрогидрокранов 30 и гидроцилиндров 31, 32, 33, 36 отклоняются: ДУП 2 (фиг. 4, фиг. 5), расположенная на верхней поверхности правой консоли крыла, и синхронно отклоняемые поверхности 6, 8, расположенные на верхней и нижней поверхности той же консоли крыла, а также дополнительно управляющая поверхность 14, расположенная на правой боковой поверхности фюзеляжа, и закрылок 11. Кроме того, по поступающим сигналам с блока 29 на сервоприводы гидроусилителей 34, 35, 37, соответственно, руля направления 15, элеронов 9, 10 и правой и левой консоли стабилизатора 16 и 17, происходит отклонение руля направления с углом 

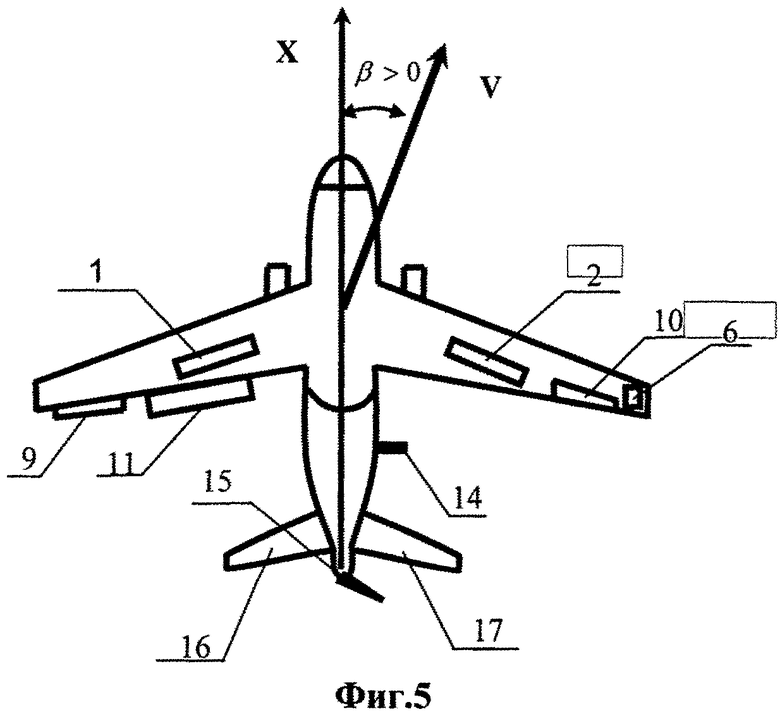
Отклонение дополнительной поверхности 2 приводит к тому, что происходит уменьшение Mx(β) вследствие падения подъемной силы правой консоли, изменение знака угла отклонения элеронов 9, 10 на противоположный приводит к дальнейшему уменьшению Mx(β). Синхронное отклонение ДУП 6, 8 приносит двойной эффект: совместное отклонение приводит к тому, что на концах консолей крыла возникает дополнительная сила лобового сопротивления, направленная назад и создающая момент, направленный на устранение угла β, а отклонение поверхности 6, поскольку она расположена на верхней поверхности крыла, также способствует уменьшению момента крена от угла скольжения. Отклонение поверхности 14 (фиг. 5), расположенной на правой боковой поверхности фюзеляжа, приводит к тому, что возникающая сила лобового сопротивления создает момент, направленный на устранение угла скольжения, а следовательно, моментов рыскания и крена. Совместное отклонение элерона 9 и закрылка 11 изменяет кривизну профиля и увеличивает подъемную силу левой плоскости, уменьшая тем самым момент крена от угла скольжения. Отклонением руля направления 15 создается момент My(δH), направленный на устранение угла скольжения. Уменьшение угла отклонения стабилизатора приводит к уменьшению угла атаки и, как следствие, к уменьшению подъемной силы левой и правой плоскости крыла, а следовательно, и к уменьшению момента Mx(β).
В случае отказа правого двигателя 4 у ЛА, совершающего маневр с увеличивающимся углом крена, на правую плоскость отклоняются ДУП 1, 5, 7, 13, изменяется знак угла отклонения руля направления 15 и элеронов 9, 10, происходит изменение кривизны профиля правой консоли за счет отклонения элерона 10 и закрылка 12 (фиг. 1), аналогичным образом уменьшаются углы отклонения правой и левой консоли стабилизатора для уменьшения угла атаки. Все вышеуказанное приводит к тому, что возникают силы и моменты, направленные на устранение угла скольжения уже на левую плоскость и уменьшение момента рыскания My(β) и момента крена Mx(β) на правую плоскость.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ УСТОЙЧИВОСТЬЮ ЛЕТАТЕЛЬНОГО АППАРАТА В ПОЛЕТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2352498C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2364548C2 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| САМОЛЕТ С КОЛЕБЛЮЩИМИСЯ ПРЕДКРЫЛКАМИ | 2010 |
|
RU2457154C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2008 |
|
RU2466907C1 |
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ВЕСА ТОПЛИВА САМОЛЕТА | 2008 |
|
RU2377507C1 |
| Беспилотный летательный аппарат вертикального взлета и посадки | 2017 |
|
RU2716391C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327602C1 |
| Летательный аппарат короткого взлета и посадки с газодинамическим управлением | 2018 |
|
RU2711760C2 |
Изобретение относится к области летательных аппаратов. Способ повышения безопасности полета летательного аппарата при отказе двигателя, работающего в момент отказа на максимальном или форсажном режиме и расположенного на той плоскости крыла, на которую у летательного аппарата имеется увеличивающийся угол крена, основан на использовании аэродинамических поверхностей. На возникшие из-за отказа двигателя моменты рыскания и крена воздействуют за счет дополнительно управляющихся поверхностей, расположенных на левой и правой консолях крыла, боковых поверхностях фюзеляжа, при отклонении которых изменяется картина обтекания каждой консоли крыла, фюзеляжа, приводящем к устранению моментов крена и рыскания. Это достигается изменением кривизны профиля той консоли крыла, на которой расположен отказавший двигатель, приводящей к увеличению ее подъемной силы и к уменьшению момента крена, уменьшением угла атаки путем отклонения консолей стабилизатора, и приводящей к уменьшению подъемной силы левой и правой плоскости крыла, а следовательно, и момента крена. Изобретение направлено на повышение безопасности полета. 5 ил.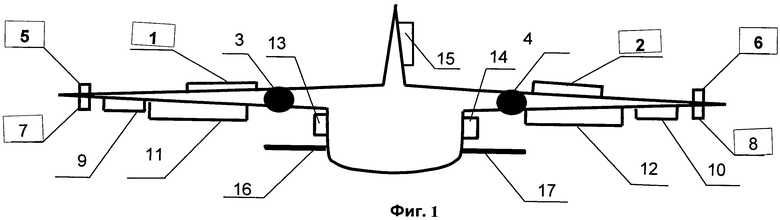
Способ повышения безопасности полета летательного аппарата при отказе двигателя, работающего в момент отказа на максимальном или форсажном режиме и расположенного на той плоскости крыла, на которую у летательного аппарата имеется увеличивающийся угол крена, основанный на использовании аэродинамических поверхностей, отличающийся тем, что воздействуют на возникшие из-за отказа двигателя моменты рыскания и крена за счет дополнительно управляющихся поверхностей, расположенных на левой и правой консолях крыла, боковых поверхностях фюзеляжа, при отклонении которых изменяется картина обтекания каждой консоли крыла, фюзеляжа, приводящем к устранению моментов крена и рыскания, изменением кривизны профиля той консоли крыла, на которой расположен отказавший двигатель, приводящей к увеличению ее подъемной силы и к уменьшению момента крена, уменьшением угла атаки путем отклонения консолей стабилизатора, и приводящим к уменьшению подъемной силы левой и правой плоскости крыла, а следовательно, и момента крена.
| EP 1026565 A1, 09.08.2000 | |||
| Индукционная печь для нагрева токами промышленной частоты | 1973 |
|
SU471395A1 |
| US 7364121 B2, 29.04.2008 | |||
| САМОЛЕТ С СИСТЕМОЙ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2011 |
|
RU2472672C1 |

